BAB IV PENGUJIAN ALAT DAN PEMBAHASAN
Pada bab IV pengujian alat dan pembahasan akan mengulas hasil pengamatan serta analisis untuk mengetahui kinerja dari rangkaian dan alat. Rangkaian di analisis untuk mengetahui dan mendapatkan data yang dihasilkan oleh alat tersebut,sehingga data dapat digunakan untuk menyempurnakan kinerja alat dan dapat digunakan untuk pengembangan lebih lajut. Metode pengujian dipilih berdasarkan fungsi operasional dan beberapa parameter yang ingin diketahui dari sistem tersebut.4.1.Pengujian Fungsional
Pengujian fungsional bagian dan sistem keseluruhan yang terdiri dari pengujian rangkaian catu daya, rangkaian multivibrator, Speaker, motor, dan
sensor HC-SR.
4.1.1. Pengujian rangkaian catu daya
Catu daya yaitu sumber tegangan dan bagian terpenting pada rangkaian. Catu daya pada rangkain ini mengunakan 2 output tegangan, yaitu catu daya
dengan output tegangan 5 VDC dengan menggunakan IC regulator LM 7805 dan catu daya dengan output tegangan 12 VDC dengan menggunakan IC regulator LM7805. Pengujian tegangan sumber daya dilakukan di 2 titik yaitu di keluaran IC LM7805 untuk pengujian catu daya mikrokontroler dan di keluaran IC LM7812 untuk pengujian catu daya motor DC. Pengujian dilakukan dengan menggunakan multimeter digital yang diset sebagai voltmeter DC. Kedua elektrode masing – masing dihubungkan ke keluaran IC untuk elektrode merah dan ground untuk elektrode hitam.
Titik pengujian catu daya ditunjukkan pada Gambar 4.1.
1
Gambar 4.1 Titik pengujian catu daya 5V (1) dan 12V (2)
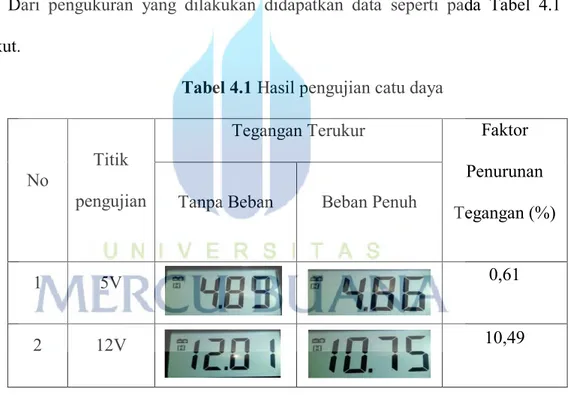
Dari pengukuran yang dilakukan didapatkan data seperti pada Tabel 4.1 berikut.
Tabel 4.1 Hasil pengujian catu daya
No Titik pengujian
Tegangan Terukur Faktor Penurunan Tegangan (%) Tanpa Beban Beban Penuh
1 5V 0,61
2 12V 10,49
Dari Tabel 4.1 diketahui bahwa terjadi penurunan tegangan yang sangat drastis pada IC regulator LM7812 saat beban penuh. Hal itu terjadi karena motor DC membutuhkan daya yang besar saat membuka tutup tempat sampah sehingga regulasi tegangan IC LM7812 yang terbatas tidak mampu untuk mempertahankan nilai tegangan. Namun hal itu tidak akan merusak IC ataupun motor karena hanya berlangsung beberapa detik saja setelah itu tegangan akan normal kembali.
Sedangkan pada IC regulator LM7805 penurunan tegangan tidak terlalu besar karena beban IC ini relatif kecil.
Untuk mengetahui berapa persen faktor penurunan tegangan pada catu daya, dapat digunakan rumus berikut.
% 𝐹𝑎𝑘𝑡𝑜𝑟 𝑃𝑒𝑛𝑢𝑟𝑢𝑛𝑎𝑛 𝑇𝑒𝑔𝑎𝑛𝑔𝑎𝑛 =
𝑉𝑡𝑎𝑛𝑝𝑎 𝑏𝑒𝑏𝑎𝑛−𝑉𝑏𝑒𝑏𝑎𝑛 𝑝𝑒𝑛𝑢ℎ
𝑉𝑡𝑎𝑛𝑝𝑎 𝑏𝑒𝑏𝑎𝑛 𝑥 100 % ...(4.1)
%Faktor penurunan tegangan 5V = 4,89−4,86
4,89 ×100%
%Faktor penurunan tegangan 5V = 0, 61%
%Faktor penurunan tegangan 12V = 12,01−10,7512,01 ×100%
%Faktor penurunan tegangan 12V = 10,49%
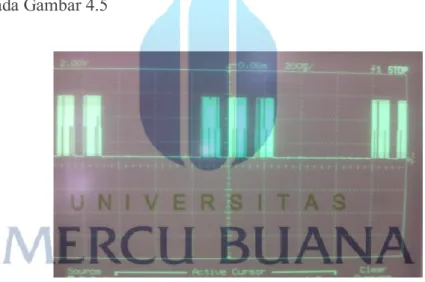
4.1.2. Pengujian Multivibrator
Pada pengujian multivibrator, diperlukan sebuah osiloskop yang digunakan untuk melihat bentuk gelombang, serta menghitung parameter lainnya. Pada pengujian ini elektrode osiloskop dihubungkan dengan kaki nomor 3 IC NE555 yang mana kaki tersebut merupakan kaki output gelombang kotak yang
dihasilkan oleh IC NE555.
Gambar 4.2 adalah gambar dari bentuk gelombang yang dihasilkan oleh multivibrator IC NE555
Gambar 4.3 Frekuensi multivibrator
Dari Gambar 4.3, didapatkan frekuensi dari multivibrator sebesar 38,46Khz dengan Duty Cycle 60%. Frekuensi tersebut masih sesuai dengan datasheet sensor ultrasonik HC-SR04 sehingga multivibrator ini baik dan dapat
digunakan.
4.1.3. Pengujian Modulator
Modulator yang dipakai pada tempat sampah otomatis ini adalah sebuah gerbang logika AND dimana gerbang logika ini akan menghasilkan keluaran high
(1) hanya jika kedua masukkannya berlogika high (1). Pada rangkaian ini, salah
satu masukkan gerbang and dihubungkan dengan pin digital mikrokontroler sedangkan masukan yang lain dihubungkan ke output multivibrator. Output dari
modulator ini kemudian dihubungkan ke lampu LED infrared untuk diubah
menjadi cahaya.
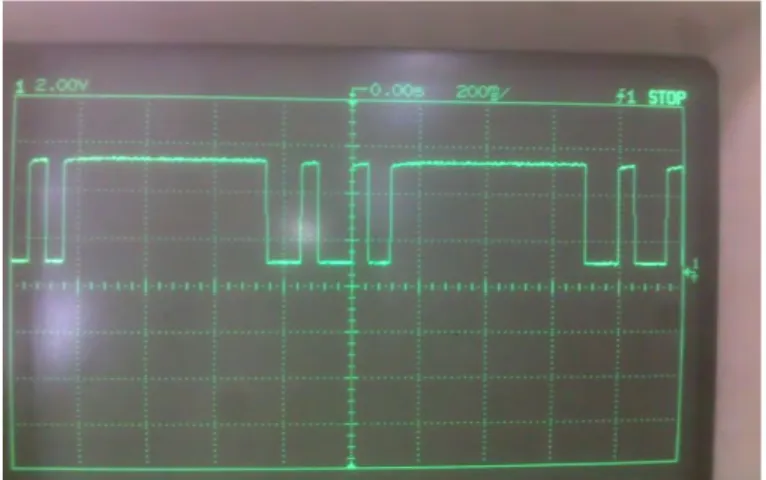
Proses berhasil, maka mikrokontroler akan menghasilkan sinyal seperti Gambar 4.4.
Gambar 4.4 Sinyal output mikrokontroler
Gelombang yang dihasilkan mikrokontroler tersebut kemudian dimodulasikan secara PCM oleh modulator dan menghasilkan sinyal output seperti pada Gambar 4.5
Gambar 4.5 Sinyal output modulator
Dari Gambar 4.5, dapat disimpulkan bahwa modulator dapat bekerja dengan baik.
4.1.4. Pengujian Sensor HC-SR04
Sesuai namanya sensor ini bekerja pada frekuensi suara (sonic = sound=suara) yang bernada tinggi (ultra=sangat tinggi ), yaitu disekitar range frekuensi 40 KHz (sebagai catatan, frekuensi yang mampu terdengan manusia
adalah 20 Hz – 20 KHz. Pada sensor ultrasonik jenis HC-SR04 terdapat dua buah sensor transducer yang masing-masing berfungsi sebagai transmitter ultrasonik dan sebuah receiver yang berfungsi sebagai penerima pantulan (return echo) frekuensi ultrasonik dari obyek yang diukur jaraknya terhadap sensor. Jarak terukur sensor sendiri dihitung berdasarkan lamanya waktu gelombang ultrasonik sampai ke receiver (echo) dihitung dari pertama kali ditembakkan transmitter (PING).
Berikut list program pengujian Sensor HC-SR04. #include<NewPing.h>
#define TRIGGER_PIN 12// Jump pin TRIGGER sensor ke Pin 12 #define ECHO_PIN 11//Jump Pin ECHO sensor ke Pin 11 arduino #define MAX_DISTANCE 50 // Jarak maksimum dalam (cm) NewPing sonar (TRIGGER_PIN,ECHO_PIN, MAX_DISTANCE); Void setup(){
Serial.begin(9600); // Buka serial monitor dengan br 9600 }
Void loop() {
Delay(100); // delay setiap pengukuran 100 second (dapat disetting sesuai kebutuhan)
Unsigned int Us = sonar.ping(); // Serial.print(“Ping: “);
Serial.print(us / us_ROUNDTRIP_CM); Serial.println(“cm”);
Gambar 4.6 Bentuk sinyal output sensor HC-SR04
4.2. Pengujian motor Servo
Pada sistem tempat sampah otomatis ini, Driver motor DC menggunakan
jenis H-bridge yang telah dimasukkan ke dalam chip IC L293D. Input IC ini
terhubung pada Pin 12 dan Pin 11 mikrokontroler. Untuk memutar motor Servo, salah satu dari kedua pin tersebut harus berlogika high (1) sedangkan pin yang
lain berlogika low.
Listing program pengujian motor servo sebagai berikut : #include<Servo.h> Servo myservo; Int pos=0; Void setup() { Myservo.attach(9); } Void loop()
{
For(pos=0;pos<180;pos+=45)// Posisi servo berada pada 1800 dan >=10
// posisi servo berada diantara 00-1800
{ //Servo mengalami penambahan 450
Myservo.write(pos);
Delay(4000);// delay selama 4 detik }
For(pos=180;pos>=1;pos =45) // ketika servo berada pada 1800 dan
>=10
} // Servo mengalami penurunan 450/
Myservo.write(pos);
Delay(4000); // delay selama 4 detik }
}
Hasil dari pengujian driver motor DC adalah sebagai berikut : Tabel 4.2 Hasil pengujian sudut motor servo
Sudut yang disetting Pembacaan busur derajat ( 0 ) Error 00 00 0 450 500 11,11 900 900 0 1350 1400 3,7 1800 1900 5,56
Dari hasil pengujian pada Tabel 4.3, persimpangan derajat pergerakan yang diinginkan berkisar 0-10 derajat dan disimpulkan bahwa motor servo dapat bekerja dengan baik.
4.3. Pengujian Voice Recorder
Pada voice recorde pin M1 dihubungkan ke mikrokontroler melalui Pin
digital sedangkan Pin power dihubungkan ke Pin 4. Pin - pin tersebut akan aktif jika diberikan logika low (0). Fungsi delay digunakan untuk memberikan waktu
untuk modul voice recorder untuk merespon sinyal trigger dari mikrokontroler.
4.4. Pengujian alat secara keseluruhan
Setelah perangkat keras sudah teruji dan perangkat lunak telah didownloadkan ke mikrokontroler ATmega 328 menggunakan usb arduino
downloader, kemudian dilakukan pengujian keseluruhan sistem.
Langkah-langkahnya yaitu dengan menghubungkan keseluruhan rangkaian hardware dan
termasuk mendownloadkan program software yang telah dibuat. Tujuan utama
dari pengujian alat secara keseluruhan adalah untuk mengetahui apakah alat dapat bekerja sesuai perancangan awal atau tidak.
Saat saklar power pada posisi ON, maka lampu indikator sensor akan
menyala berkedip. Lampu tersebut berkedip karena sensor HC-SR04 menerima sinyal dari lampu LED inframerah namun, tutup tempat sampah tidak akan terbuka karena sinyal yang diterima sensor inframerah kecil. Sinyal yang kecil ini mengakibatkan sinyal output sensor mengandung noise sehingga mikrokontroler
Kemudian letakkan sebuah objek di atas sensor 1 didepan tempat sampah dan tutup tempat sampah akan membuka dan memutar rekaman suara pesan 1. setelah 3 detik, tutup tempat sampah akan menutup kembali dan akan memutar rekaman suara pesan 2. Ketika sensor 2 dibawah tutup sampah mendeteksi material dengan jarak 10 cm dari sensor 2.
Tabel 4.3 berikut menunjukkan response suara voice recorder dari pendeteksian objek material dengan tiga kondisi.
Tabel 4.3 Pengujian sensor 2 mendeteksi volume sampah.
Berisi 3 kondisi Volume tempat sampah Jarak sensor Response suara rekaman 1 2 Material Kosong 5-10 cm √ 10-20 cm √ 20-30 cm √ 30-40 cm √ Setengah penuh 5-10 cm √ 10-20 cm √ 20-30 cm √ 30-40 cm √ Penuh 5-10 cm √ 10-20 cm √ 20-30 cm √ 30-40 cm √ Keterangan :
Response suara rekaman 1 : Terimakasih telah membuang sampah pada tempatnya.
Dari Tabel 4.3, dapat diketahui bahwa semakin dekat material dengan sensor ultrasonic 2 maksimal jarak 10 cm maka voice recorder akan memutar suara 2 yaitu tempat sampah penuh. Sebaliknya jika volume tempat sampah belum mencapai batas jarak 10 cm dari sensor ultrasonic 2 , maka voice recorder akan terus memutar suara 1 yaitu terimakasih telah membuang sampah pada tempatnya. Apabila sensor 1 yang berada di depan tempat sampah terus mendeteksi material, dan sensor 1 akan berhenti mendeteksi ketika sensor 2 sudah mendeteksi volume sampah sudah terisi penuh atau over kapasitas.
Sedangkan pada sensor 1 yang berada didepan wadah sampah diatur untuk mendeteksi obyek material yang berada diatasnya . Berikut ini tabel percobaan jarak sensor 1 ultrasonik.
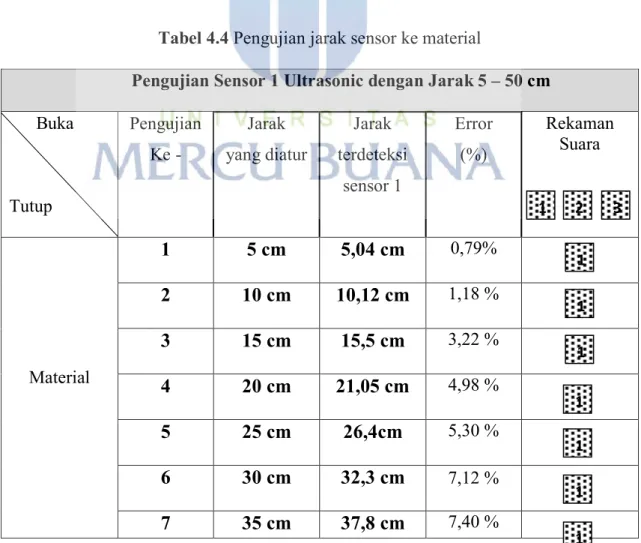
Tabel 4.4 Pengujian jarak sensor ke material
Pengujian Sensor 1 Ultrasonic dengan Jarak 5 – 50 cm
Buka Tutup Pengujian Ke - Jarak yang diatur Jarak terdeteksi sensor 1 Error (%) Rekaman Suara Material 1 5 cm 5,04 cm 0,79% 2 10 cm 10,12 cm 1,18 % 3 15 cm 15,5 cm 3,22 % 4 20 cm 21,05 cm 4,98 % 5 25 cm 26,4cm 5,30 % 6 30 cm 32,3 cm 7,12 % 7 35 cm 37,8 cm 7,40 % 1 2 3 1 1 1 1 1 1
8 40 cm 43,4cm 7,83 %
9 45 cm x x
10 50 cm x x
Catatan : Material (plastik, karton)
Keterangan Suara : Bersuara “terimakasih telah membuang sampah pada tempatnya.
Bersuara “ tempat sampah penuh” Mati
Dalam pengujian ini, pengukuran jarak sensor ultrasonik dengan jarak yang diatur menggunakan mistar mulai 5 cm sampai jarak 50 cm. Material yang digunakan adalah karton ,plastik. Sensor ultrasonik terhadap material yang diuji mengalami rentang error terendah 0,32 % sampai tertinggi 2,04 % .Setelah diperoleh data pengukuran ,ditemukan adannya error dan dapat dianalisis dengan rumus sebagai berikut :
Error % = (𝐽𝑎𝑟𝑎𝑘 𝑦𝑎𝑛𝑔 𝑑𝑖𝑢𝑘𝑢𝑟 −𝐽𝑎𝑟𝑎𝑘 𝑦𝑎𝑛𝑔 𝑑𝑖𝑎𝑡𝑢𝑟)𝐽𝑎𝑟𝑎𝑘 𝑦𝑎𝑛𝑔 𝑑𝑖𝑢𝑘𝑢𝑟
𝑥 100 =
... (1)Hasil pengujian 10 kali percobaan percobaan ke-1 sampai ke-8 dengan jarak 5 cm- 40 cm sukses dan rekaman suara 1 pada voice recorder dapat diputar. Pada percobaan ke- 9 dan ke -10 mati serta perekam suara off disebabkan pada program arduino ke sensor diluar batas settingan yaitu diatas rentang jarak 43 cm.
1 2 3 1 3 3