DAFTAR ISI
1. Overview Plant
2. Block Diagram Plant
3. Software LabVIEW 2013
4. Setting DAQ
5. Setting Inverter
6. Konfigurasi dan Instalasi Encoder
7. Sensor Temperatur
8. Hybrid Fuzzy PID
9. Fuzzy PD Plus Integral
10. PID LQR Adaptive
11. Fuzzy PID
1. Overview Plant
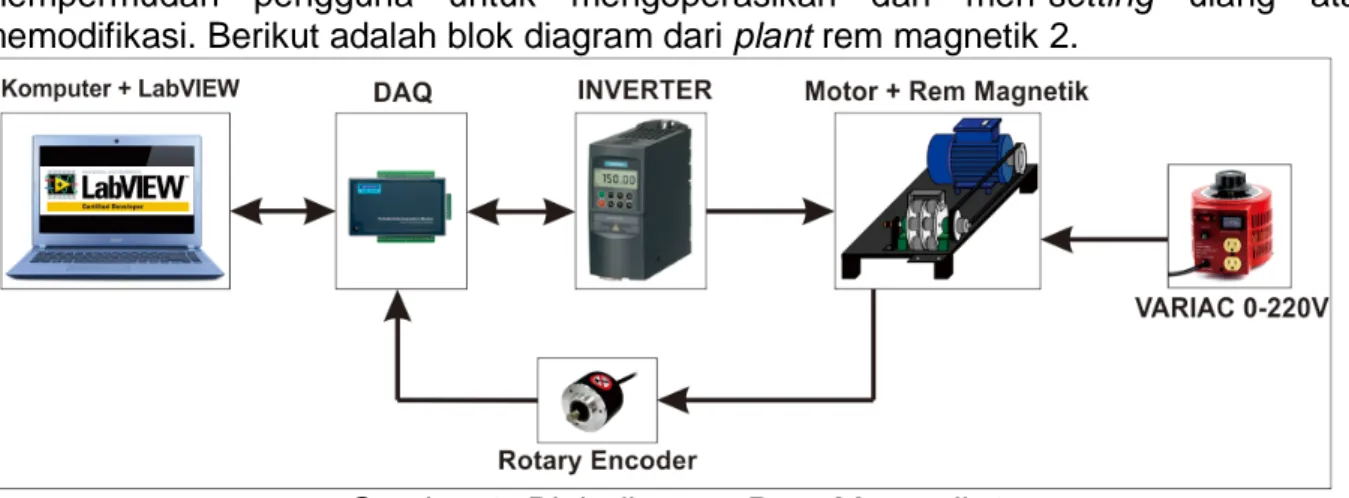
Plant yang terdiri dari Motor induksi tiga fasa yang dikopel dengan rem magnetik menggunakan belt dengan rasio gear 1:1 yang dapat berputar dengan kecepatan putar maksimum 1160 rpm. Merupakan modifikasi dari grup rem magnetik 1, dengan
menambahkan sensor temperatur dan sensor arus. Plant ini dikhususkan untuk
penggunaan kontrol menggunakan virtual control (menggunakan software komputer)
karena sarana komunikasi device-nya menggunakan USB sehingga memudahkan
untuk komunikasi dengan komputer. Device yang digunakan untuk interface antara komputer dan plant menggunakan DAQ advantech UBS-746. Device DAQ ini support
dengan software Labview untuk kontrolernya.
Kontroler dirancang dengan software Labview dan juga sebagai media Human Machine Interface (HMI). Dengan setpoint dari labview dan sinyal kontrol yang dikirim
melalui USB ke DAQ selanjutnya sinyal kontrol men-drive inverter. Perubahan
kecepatan putar motor dapat dideteksi oleh rotary encoder yang dihubungkan ke DAQ yang kemudian sinyal tersebut dikirim ke labview sebagai umpan balik (feedback) sehingga terbentuk suatu kontrol close loop yang menjadikan motor induksi tiga fasa menjadi mudah dikontrol kecepatannya.
2. Block Diagram Plant
Dalam suatu proses kontrol, diperlukan suatu blok diagram plant sehingga
mempermudah pengguna untuk mengoperasikan dan men-setting ulang atau
memodifikasi. Berikut adalah blok diagram dari plant rem magnetik 2.
Gambar 2. Blok diagram Rem Magnetik 2
3. Software Labview 2013
LabVIEW adalah sebuah software pemrograman yang diproduksi oleh National Instruments dengan konsep yang berbeda. Seperti bahasa pemograman lainnya yaitu C++, MATLAB atau Visual basic, LabVIEW juga mempunyai fungsi dan peranan yang sama, perbedaannya bahwa LabVIEW menggunakan bahasa pemrograman berbasis grafis atau blok diagram sementara bahasa pemrograman lainnya menggunakan basis
text. Program LabVIEW dikenal dengan sebutan “VI” atau Virtual Instruments karena penampilan dan operasinya dapat meniru sebuah instrument. Pada LabVIEW, user
pertama-tama membuat user interface atau front panel dengan menggunakan kontrol dan indikator, yang dimaksud dengan kontrol adalah knobs, push buttons, dials dan peralatan input lainnya sedangkan yang dimaksud dengan indikator adalah graph, LED dan peralatan display lainnya. Setelah menyusun user interface, lalu user menyusun blok diagram yang berisi kode-kode VI untuk mengatur front panel. Software LabVIEW terdiri dari tiga komponen utama, yaitu :
a) Front Panel
Front panel adalah window yang berlatar belakang abu-abu serta mengandung kontrol dan indikator. Front panel digunakan untuk membangun sebuah VI, menjalankan program dan men-debug program. Tampilan dari front panel dapat dilihat pada Gambar 3.
b) Blok diagram dari VI
Blok diagram adalah window yang berlatar belakang putih berisi source code
yang dibuat dan berfungsi sebagai instruksi untuk front panel. Tampilan dari blok diagram dapat lihat pada Gambar 4.
Gambar 4. Blok Diagram
c) Control dan Functions Pallete
Control dan Functions Pallete digunakan untuk membangun sebuah VI. Control Pallete merupakan tempat beberapa kontrol dan indikator pada front panel,
control pallete hanya tersedia di front panel, untuk menampilkan control pallete
dapat dilakukan dengan mengklik windows show control pallete atau klik kanan pada front panel. Contoh control pallete ditunjukkan pada Gambar 5a).
a) b) Gambar 5. Control dan Function Palette
Functions Pallete digunakan untuk membangun sebuah blok diagram, functions pallete hanya tersedia pada blok diagram, untuk menampilkannya dapat dilakukan dengan mengklik windows >> show control pallete atau klik kanan pada lembar kerja blok diagram. Contoh dari functions pallete ditunjukkan pada Gambar 5b).
4. Setting DAQ
DataAcquisition atau DAQ adalah produk dan atau proses pengambilan contoh data yang mengukur fenomena fisik atau elektrik kemudian mengubahnya ke dalam nilai digital yang dapat disimulasi dengan menggunakan komputer. DAQ berfungsi untuk mengkonversi nilai tegangan yang berasal dari komputer utama menjadi nilai frekuensi yang dibutuhkan oleh inverter.
Gambar 6. Konektor I/O USB-4716
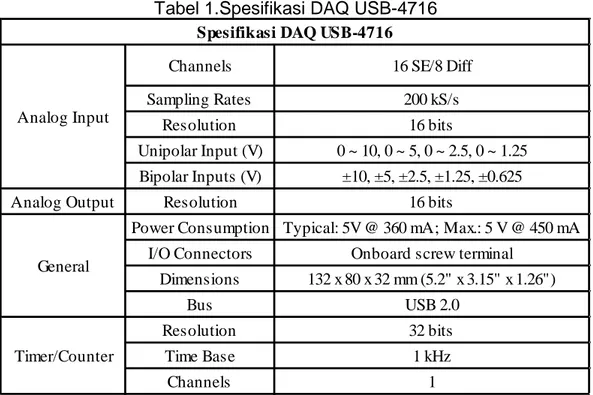
DAQ yang digunakan pada penelitian kali ini adalah DAQ Advantech Module USB-4716. USB-4716 mempunyai 1 port USB, 16 port Analog Input, 8 port Digital Output, 8 port Digital Input, 2 Analog Output dan 3 port External Control untuk lebih jelasnya bisa dilihat pada Gambar 6. Sedangkan beberapa spesifikasi pada DAQ bisa dilihat pada Tabel 1.
Tabel 1.Spesifikasi DAQ USB-4716
Channels 16 SE/8 Diff
Sampling Rates 200 kS/s
Resolution 16 bits
Unipolar Input (V) 0 ~ 10, 0 ~ 5, 0 ~ 2.5, 0 ~ 1.25 Bipolar Inputs (V) ±10, ±5, ±2.5, ±1.25, ±0.625
Analog Output Resolution 16 bits
Power Consumption Typical: 5V @ 360 mA; Max.: 5 V @ 450 mA I/O Connectors Onboard screw terminal
Dimensions 132 x 80 x 32 mm (5.2" x 3.15" x 1.26") Bus USB 2.0 Resolution 32 bits Time Base 1 kHz Channels 1 Analog Input General Timer/Counter
a) Perancangan Hardware
Salah satu kelebihan karakter DAQ USB-4716 adalah plug and play sehingga komponen ini tidak memerlukan jumper atau switch (setting) pada modul. Tetapi
setting dilakukan pada program bawaan DAQ tersebut.
Komputer Black : Out A Blue : Ground DAQ Encoder USB Inverter Input Analog Ground
Gambar 7. Konfigurasi Hardware DAQ
Untuk konfigurasi hardware, DAQ berhubungan dengan komputer, Inverter, dan
Encoder. Agar komputer dapat berkomunikasi dengan DAQ cukup hubungkan
port USB pada komputer dan port RS 232 pada DAQ dengan kabel RS 232 to
USB. DAQ dapat menghitung counter yang masuk dari Encoder jika kabel hitam dan biru pada Encoder dihubungkan dengan pin EVT_IN dan DGND pada DAQ.
Pin EVT_IN merupakan pin input untuk menghitung counter. Untuk
menghubungkan inverter dengan DAQ, pin AO0 dan AGND pada DAQ perlu dihubungkan dengan port input analog dan ground pada inverter. Konfigurasi
hardware DAQ telah ditunjukkan pada Gambar 7.
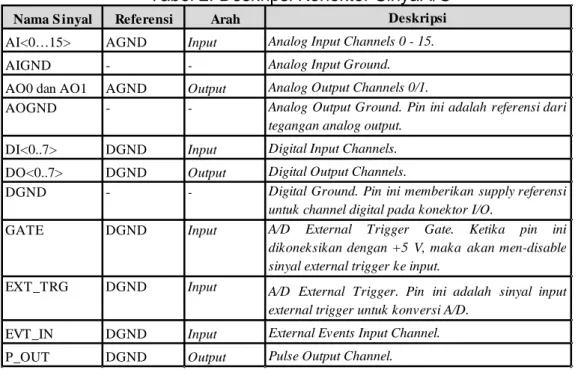
Tabel 2. Deskripsi Konektor Sinyal I/O
Nama S inyal Referensi Arah Deskripsi
AI<0…15> AGND Input Analog Input Channels 0 - 15.
AIGND - - Analog Input Ground.
AO0 dan AO1 AGND Output Analog Output Channels 0/1.
AOGND - - Analog Output Ground. Pin ini adalah referensi dari
tegangan analog output.
DI<0..7> DGND Input Digital Input Channels.
DO<0..7> DGND Output Digital Output Channels.
DGND - - Digital Ground. Pin ini memberikan supply referensi untuk channel digital pada konektor I/O.
GATE DGND Input A/D External Trigger Gate. Ketika pin ini dikoneksikan dengan +5 V, maka akan men-disable sinyal external trigger ke input.
EXT_TRG DGND Input A/D External Trigger. Pin ini adalah sinyal input
external trigger untuk konversi A/D.
EVT_IN DGND Input External Events Input Channel.
b) Perancangan Software
Untuk memberikan setting pada DAQ, komputer sebagai kontrol utama perlu dihubungkan dengan DAQ. Setelah komputer dihubungkan dengan DAQ USB-4716, diperlukan instalasi beberapa software pendukung, seperti software driver
DAQ dan software driver DAQ terhadap LabView.
Setelah software pendukung sudah ter-instal, maka bisa dilakukan pengecekan apakah DAQ sudah terhubung dengan komputer atau belum. Pengecekan ini bisa dilakukan dengan membuka software Advantech Navigator. Apabila pada sub Installed Devices sudah terdapat “USB-4716, BID#0” maka DAQ sudah terhubung dan setting DAQ sudah bisa dilakukan.
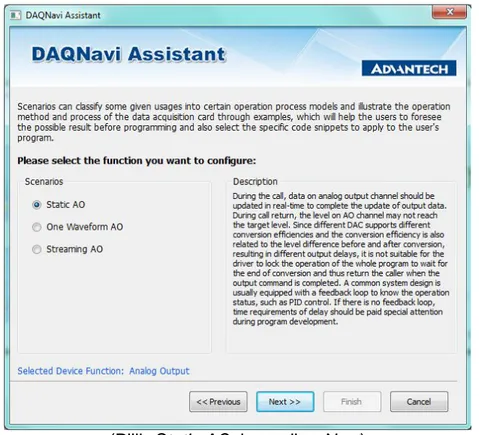
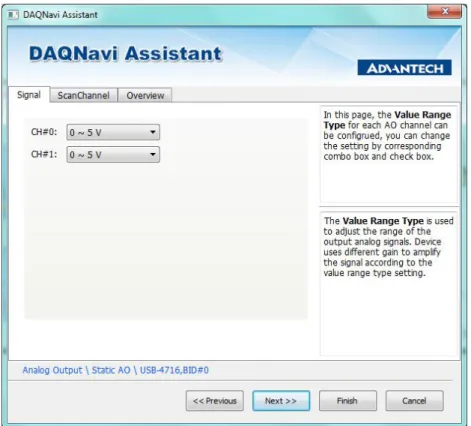
Untuk memasukkan komponen DAQ ke Labview, diharuskan untuk memilih komponen DAQNavi Assistant agar kita dapat melakukan setting pada DAQ. Untuk melakukan setting DAQ sebagai AnalogOutput, pilih AnalogOutput pada jendela pertama, lalu pilih next, pilih Static AO, pilih next, pilih USB-4716,BID#0, pilih next, untuk channel 0 dan channel 1 pilih 0 ~ 5 V, pilih next, biarkan dalam kondisi default, pilih next, maka akan tampil Overview dari setting yang sudah dilakukan. Cek hasil setting kembali, apabila sudah selesai, pilih finish. Gambar langkah-langkah setting AnalogOutput bisa dilihat pada Gambar 8 sampai dengan Gambar 13.
(Pilih Analog Output kemudian klik Next)
(Pilih Static AO, kemudian Next)
Gambar 9. Membuat Static AO, AnalogOutput DAQNavi Asissistant.
(Pilih USB-4716, kemudian klik Next)
(Range yang diinginkan, kemudian klik Next)
Gambar 11. Memilih Range AnalogOutput DAQNavi Asissistant.
(Pada Scan Chanel pilih Scaled Data, kemudian klik Next) Gambar 12. Memilih Scan Chanel AnalogOutput DAQNavi Asissistant
(Lihat pada Overview, kemudian klik Finish)
Gambar 13. Melihat Hasil Overview AnalogOutput DAQNavi Asissistant.
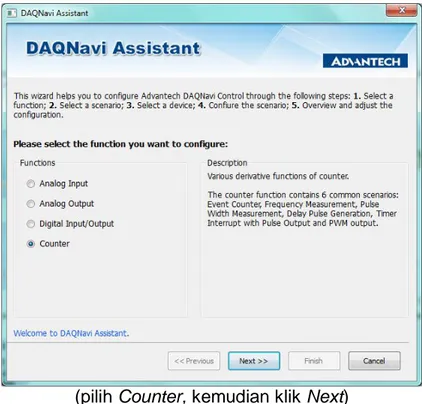
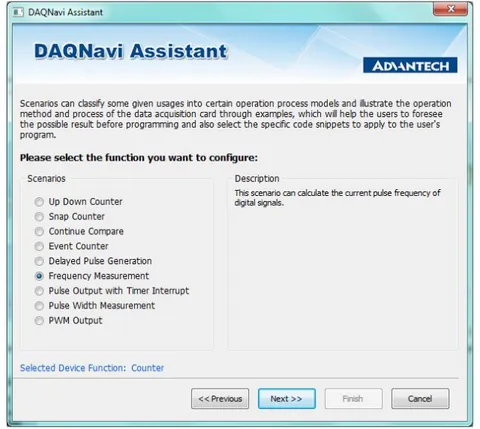
Untuk melakukan setting DAQ sebagai Counter, pilih Counter pada jendela pertama, pilih Frequency Measurement, pilih next, pilih USB-4716, BID#0, pilih next, pada channel 0 pilih Counting Pulse By Dev Time, pilih next, maka akan muncul
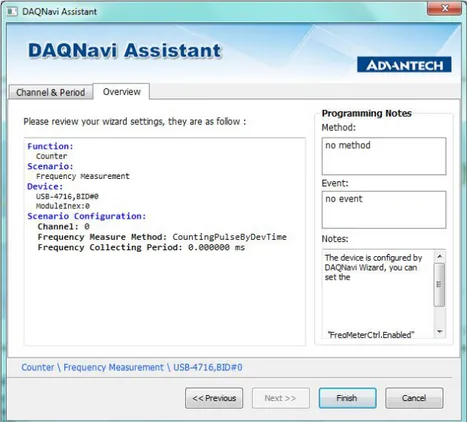
Overview dari setting yang sudah dilakukan. Cek hasil setting kembali, apabila sudah selesai, pilih finish. Gambar langkah-langkah setting Counter bisa dilihat pada Gambar 14 sampai Gambar 17.
(pilih Counter, kemudian klik Next)
(pilih Frequency Measurement, kemudian klik Next)
Gambar 15. Scenario Frequency MeasurementDAQNavi Asissistant
(pilih USB-4716, kemudian Klik Next)
(pilih 0pada Channel, kemudian klik Next)
Gambar 17. Pilih Channel dan Periode Channel DAQNavi Asissistant
(klik Finish)
Gambar 18. Melihat Hasil Overview Counter DAQNavi Asissistant
c) Pengujian DAQ
Untuk melakukan pengujian DAQ dan inverter diperlukan alat ukur seperti
pada DAQ, lalu mengukur frekuensi yang dihasilkan oleh inverter. Skema pengujian inverter ditunjukkan pada Gambar 19.
Inverter DAQ
USB-4716
Motor Induksi
Tiga Fasa Rem Magnetik Komputer
Voltmeter
Gambar 19. Skema Pengujian Inverter
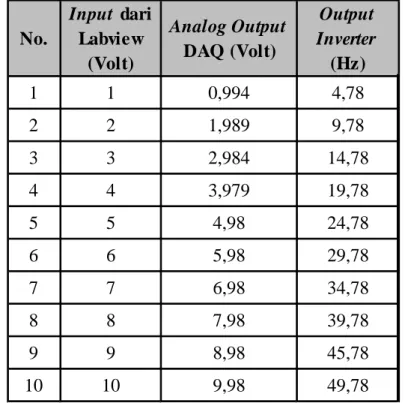
Pengujian DAQ dan inverter dilakukan untuk mengetahui apakah output dari DAQ sudah sesuai dengan input yang diberikan ke DAQ. Sedangkan pengujian untuk inverter dilakukan untuk mengetahui berapa besarnya frekuensi yang dihasilkan inverter. Data pengujian DAQ dan inverter ditunjukkankan pada Tabel 3.
Tabel 3.Hasil Pengujian Antara DAQ, Kecepatan Motor, dan OutputEncoder
No. Input dari Labview (Volt) Analog Output DAQ (Volt) Output Inverter (Hz) 1 1 0,994 4,78 2 2 1,989 9,78 3 3 2,984 14,78 4 4 3,979 19,78 5 5 4,98 24,78 6 6 5,98 29,78 7 7 6,98 34,78 8 8 7,98 39,78 9 9 8,98 45,78 10 10 9,98 49,78
Berdasarkan data hasil pengujian pada Tabel 3 dapat dilihat bahwa output
analog DAQ mengalami drop tegangan sebesar 0,02 Volt. Sedangkan besarnya frekuensi yang dihasilkan oleh inverter terjadi penurunan sebesar 0,22 Hz setiap titik ujinya, sehingga dapat diambil kesimpulan bahwa DAQ dan inverter dapat digunakan untuk mengoperasikan motor induksi tiga fasa.
5. Setting Inverter
Inverter ini merupakan inverter pengendali frekuensi yang biasa digunakan untuk pengaturan kecepatan motor AC tiga fasa. Inverter ini dikontrol oleh sebuah
mikroprocessor yang menggunakan teknologi Insulated Gate Bipolar Transistor (IGBT) sehingga memiliki kehandalan yang tinggi. Inverter Siement Micromaster 420 memiliki dua pilihan mode untuk pengaturan, yaitu Basic Operator Panel (BOP) dan Advanced Operator Panel (AOP). Perbedaan antara keduanya terletak pada cara setting
parameter dan informasi yang ditampilkan LCD. Pada BOP informasi yang ditampilkan hanya berupa frekuensi (Hz), sedangkan pada AOP informasi yang ditampilkan beragam. Pada modul ini, mode yang digunakan adalah mode BOP.
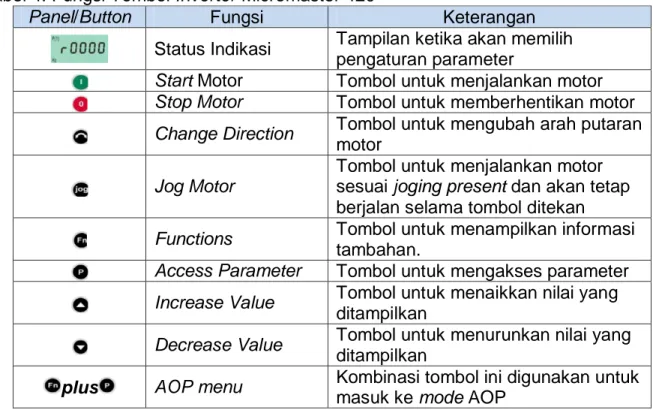
Terdapat beberapa tombol yang harus diketahui terlebih dahulu sebelum pengoperasian inverter Siemen Micromaster 420. Beberapa tombol tersebut dapat dilihat padaTabel 4.
Tabel 4. Fungsi Tombol Inverter Micromaster 420
Panel/Button Fungsi Keterangan
Status Indikasi Tampilan ketika akan memilih
pengaturan parameter
Start Motor Tombol untuk menjalankan motor
Stop Motor Tombol untuk memberhentikan motor
Change Direction Tombol untuk mengubah arah putaran
motor
Jog Motor
Tombol untuk menjalankan motor sesuai joging present dan akan tetap berjalan selama tombol ditekan
Functions Tombol untuk menampilkan informasi
tambahan.
Access Parameter Tombol untuk mengakses parameter
Increase Value Tombol untuk menaikkan nilai yang
ditampilkan
Decrease Value Tombol untuk menurunkan nilai yang
ditampilkan
plus AOP menu Kombinasi tombol ini digunakan untuk
masuk ke mode AOP
Langkah selanjutnya yang dilakuakan setelah mengetahui fungsi dari setiap tombol adalah melakukan setting pada parameter. Langkah dan cara mengakses nilai parameter yang dibutuhkan sebagai berikut:
1. Tekan tombol untuk mengakses parameter
2. Tekan tombol sampai menunjukkan parameter yang akan diakses. Misal: P0003
3. Tekan untuk mengakses parameter, kemudian tekan atau untuk memilih nilai
4. Tekan kembali untuk konfirmasi sekaligus menyimpan nilai yang di-setting
5. Setting nilai parameter berikutnya dengan cara yang sama.
Setelah men-set nilai parameter P0010 di inverter, selanjutnya yaitu memasukan nilai parameter-parameter spesifikasi yang sesuai dengan name plate pada motor seperti ditunjukan pada Gambar 20 dan Tabel 5.
Gambar 20. Parameter Quick Comissioning Pada Name Plate Motor
Tabel 5.Daftar Parameter Quick Comissioning
No. Parameter Opsi Nilai yang
dipilih 1. P0003 (Level akses pengguna) 1= Standart 2 = Extended 3 = Expert 1 2. P0010 (Memulai Comissioning) 0 = Ready 1= Quick Comissioning 30 = Factory Setting 0 3. P0100 (Frekuensi Supply) 0 = [kW]; 50 Hz 1 = [HP]; 60 Hz 2 = [kW]; 60 Hz 0 4. P0304 (Tegangan Nominal Motor) 10 – 2000 V 380 (name plate) 5. P0305 (Arus Nominal Motor) 0,01 – 3,25 A 0,62 (name plate) 6. P0307 (Daya Motor) 0,16 – 4,02 A 0,18 (name plate) 7. P0310 (Frekuensi Motor) 12 – 650 Hz 50 (name plate) 8 P0311 (Kecepatan Motor) 0 – 40000 rpm 1310 (name plate) 9. P0700 (Pemilihan Sumber Perintah) 0 = Factory default setting 1 = BOP keypad 2 = Terminal
4 = USS BOP link
5 = USS COM link
1 10. P1000 (Pemilihan Setpoint Frekuensi) 1 = MOP Setpoint 2 = Analog Setpoint 3 = Fixed Frequency 2 11. P1080
(Frekuensi Minimum Motor)
0 – 650 Hz 0 12. P1082 (Frekuensi Maksimum Motor) 0 – 650 Hz 50 13. P1120 (Ramp–up Time) 0,00 – 650,00 detik 4 14. P1121 (Ramp–down Time) 0,00 – 650,00 detik 4
No. Parameter Opsi Nilai yang dipilih 15. P3900 (End of Quick Comissioning) 0 = No Quick Comissioning 1 = End Quick Comissioning with factory reset 2 = End Quick
Comissioning with I/O
factory reset
3 = End Quick
Comissioning without factory reset
1
Setelah melakukan pengaturan untuk konfigurasi komponen inverter dengan beberapa ketentuan yang terdapat dalam tabel, maka inverter tersebut telah siap untuk digunakan.
6. Konfigurasi dan Instalasi Encoder
Rotary encoder yang digunakan merupakan rotary encoder increment dengan
type ES30S-4-100-3-N-5 dari produk Autonic. Arti dari kode tersebut seperti Gambar 21.
Gambar 21. Arti Kode Rotary Encoder Konfigurasi Rotary encoder seperti pada Gambar 22.
Gambar 22. Konfigurasi Rotary Encoder
Untuk instalasi rotary encoder pada plant hanya menghubungkan poros encoder (shaft encoder) dengan poros dari rem magnetik dengan menggunakan kopel. Diameter yang diperbolehkan ke dalam kopel adalah 3mm sampai 5mm.
Rotary encoder yang digunakan merupakan type N, yaitu output-nya merupakan NPN open collector, sehingga dari output tersebut agar menghasilkan pulsa diperlukan sebuah resistor yang dipasang paralel dengan sumber tegangan ke output. Berikut adalah cara instalasi rotary encoder pada Gambar 23.
Gambar 23. Instalasi Rotary Encoder
7. Sensor Temperatur
Untuk mengetahui kondisi rem magnet dalam keadaan panas atau tidak, maka perlu dipasangkan sensor temperatur agar kondisi rem dapat terpantau sehingga tidak terjadi overheat yang menyebabkan rem kehilangan daya cengkramnya karena medan magnet yang dihasilkan berkurang akibat panas.
Pada Plant ini digunakan sensor temperatur LM35 yang dipasang di bagian kiri dan kanan piringan rem magnetik. Terdapat tiga warna indikator yang mengindikasikan level panas dari piringan magnet tersebut. Warna hijau menandakan panas antara
range 0° sampai 40°C, warna kuning menandakan panas antara range 40° sampai 60°C, warna merah menandakan panas telah melebihi batas 60°C dan juga mengindikasikan untuk segera menghentikan pengereman karena pada kondisi ini rem magnet sudah tidak bekerja secara optimal. Berikut skema rancangan dari sensor temperatur pada Gambar 24.
1K 50K 5V 1K 50K 5V 5V 5V LM35 5V + + -R 330 5V Y 330 5V G 330 5V LM358 LM358
8. Hybrid Fuzzy PID
Suatu motor induksi bila diberi beban rem magnetik, maka torsi bebannya akan meningkat dan mengakibatkan kecepatan putaran motor tersebut menjadi turun. Agar kecepatan motor tetap konstan ketika diberikan beban, maka perlu diberikan kontroler yang mampu mengembalikan putaran nominalnya. Salah satu kontroler yang dapat menaikan performa motor induksi yaitu kontroler Hybrid Fuzzy PID. Hybrid Fuzzy PID adalah kontroler gabungan antara kontroler Fuzzy dan kontroler PID. Untuk mendesain kontroler pertama harus didapatkan model matematika plant agar bisa menentukan parameter-parameter kontroler. Implementasi kontroler Hybrid Fuzzy PID menggunakan software Labview untuk proses kontrol dan simulasinya. Hasil implementasi kontroler didapatkan perbandingan %error steady state ketiga kontroler yaitu PID 0,003%, Fuzzy 0,057%, dan Hybrid 0,016%. Sedangkan settling time 5% masing masing kontroler yaitu PID 0,906 detik, Fuzzy 1,73 detik, dan Hybrid 0,624 detik. Gambar Blok Diagram dan Diagram LabView Hybrid Fuzzy PID bisa dilihat pada Gambar 25 dan Gambar 26.
Gambar 25.Diagram Simulink Kontroler Hybrid Fuzzy PID
9. Fuzzy PD Plus Integral
Pengaturan kecepatan motor induksi tiga fasa dibuat untuk mengatur putaran motor yang tidak linear, yang diakibatkan oleh gangguan beban, noise, dan banyak faktor lainnya. Tetapi ada beberapa kekurangan apabila motor dalam keadaan dinamis dimana keadaan motor dapat berubah secara terus-menerus, hal ini karena pengaruh dari beberapa faktor yang mengganggu dari beban dan noise. Sehingga dibutuhkan kontroler yang mampu menjaga plant agar tetap stabil. Pada Tugas Akhir ini untuk menjaga kestabilan plant digunakan kontroler Fuzzy PD plus kontroler Integral. Kontroler Fuzzy PD plus kontroler Integral merupakan gabungan dari dua kontroler, yaitu kontroler Fuzzy PD dan kontroler Integral. Kontroler ini unggul dalam bekerja dengan sistem non-linear dan juga tanpa memperhatikan beban, kontroler mampu mendekati nilai referensi sehingga tidak membutuhkan model matematis plant. Hasil pengujian antara simulasi dan implementasi menunjukkan bahwa hasil dari simulasi memiliki nilai %errorsteadystate dan settlingtime 5% sebesar 0,044% dan 0,3 detik sedangkan hasil dari implementasi sebesar 0,015% dan 0,11 detik. Gambar Blok Diagram dan Diagram LabView Fuzzy PD plus kontroler Integral bisa dilihat pada Gambar 27 dan Gambar 28.
PV SP Fuzzy PD ʃ Ki Plant uPD(t) IE(t) E(t) CE(t) U(t) Kp Kd e(t) ce(t) Ku d/dt UPD(t) ie(t)
Gambar 27. Diagram Simulink Kontroler Fuzzy PDPlus Integral
10. PID LQR Adaptive
Motor induksi merupakan jenis motor yang paling banyak digunakan di industri dibandingkan dengan motor listrik yang lain, karena jenis motor ini memiliki beberapa keuntungan diantaranya konstruksinya yang sederhana, kokoh, harga relatif murah dan tidak memerlukan pemeliharaan yang rumit. Namun permasalahan utama dari bahasan ini adalah menjaga agar kecepatan putar motor tetap konstan. Jika motor induksi diberi beban yang berubah sampai pada nilai tertentu dari beban nominalnya, maka responnya akan mengalami perubahan walaupun kontroler telah diberikan. Sehingga pengaturan kecepatan motor induksi tiga fasa jauh lebih sulit dilakukan. Untuk mengatasi permasalahan tersebut digunakan teknik kontrol optimal yaitu metode Linear Quadratic Regulator (LQR) Gain Scheduling. Kontroler ini dipilih karena dapat otomatis beradaptasi dengan cara mengubah parameternya untuk menyesuaikan diri terhadap perubahan parameter plant. Hasil pengujian kontroler LQR Gain Scheduling mampu mempertahankan kecepatan motor pada tiap kondisi pembebanan. Hasil respon mendekati respon beban nominal dengan spesifikasi sebesar 0,34 detik, ts (5%) sebesar 1,02 detik, tr (5%-95%) sebesar 1 detik, td sebesar 0,28 detik, dan ess sebesar 0,6%. Gambar Blok Diagram dan Diagram LabView Linear Quadratic Regulator (LQR) Adaptive bisa dilihat pada Gambar 27 dan Gambar 28.
Gambar 27. Blok Diagram Kontroler PID LQR Adaptive
11. Fuzzy PID
Tugas akhir ini membahas desain kontroler fuzzy-PID pada plant motor induksi tiga fasa. Motor induksi tiga fasa merupakan jenis motor yang sering digunakan pada dunia industri. Hal ini dikarenakan kelebihan dari motor induksi tiga fasa yaitu konstruksinya sederhana, harganya murah dan murah dalam pemeliharaan. Namun pengaturan kecepatan motor induksi jauh lebih sulit dibandingkan motor DC. Untuk mengatur kecepatan motor induksi pada kecepatan tetap diperlukan pengaturan terhadap frekuensi atau torsi, padahal tidak ada hubungan yang linear antara arus motor dengan torsi yang dihasilkan. Permasalahan pada tugas akhir ini adalah sulitnya menjaga kecepatan putar motor induksi tiga fasa agar tetap konstan pada saat terjadi perubahan beban. Untuk mengatasi permasalahan tersebut, diperlukan sebuah desain kontroler. Metode kontrol yang digunakan adalah fuzzy-PID. Metode kombinasi ini dipilih karena kontroler PID hanya dapat mengatasi plant satu fungsi alih saja, sehingga kontroler fuzzy diperlukan untuk metode penalaan terhadap parameter PID. Hasil implementasi menunjukkan bahwa respon dapat mempertahankan kecepatan mendekati nilai setpoint dengan error 0,67% - 1,7%. Dan spesifikasi respon beban minimal dan maksimal telah mendekati respon beban nominal, dengan rata-rata ts(5%) sebesar 0,67 detik, tr(10% - 90%) sebesar 0,45 detik, dan td sebesar 0,16 detik. Gambar Blok Diagram dan Diagram LabView Fuzzy PID dilihat pada Gambar 27 dan Gambar 28. Inverter Kontroler PID Input Output Sensor Arus + + -+ Motor Induksi 3 Fasa Encoder Rem Elektromagnetik autotrafo Fuzzy
Gambar 27. Blok Diagram dengan Menggunakan Kontroler Fuzzy PID
Gambar 28. Program Implementasi dengan Kontroler Fuzzy PID