58
RANCANG BANGUN PROTOTYPE MOBIL RADIO CONTROL
DENGAN MENGGUNAKAN NODEMCU ESP8266
Wargijono Utomo
Program Studi Informatika, Universitas Krisnadwipayana Jl. Kampus Unkris, Jatiwaringin, Pondok Gede, Jakarta Timur
E-mail: [email protected]
ABSTRAK
Perkembangan mobile robot saat ini sangat pesat. Salah satu perwujudan dari mobile robot itu sendiri adalah Radio Control Car atau disingkat RC Car. Kontrol RC Car sendiri biasanya menggunakan joystick atau perangkat khusus seperti remote control konvensional. Namun dengan metode dan pengembangan tertentu, RC Car dapat dibuat dengan memanfaatkan media kendali berupa smartphone Android. Smartphone yang umumnya dimiliki oleh semua orang dapat dikolaborasikan dengan teknologi Wireless Fidelity (Wifi) dan aplikasi khusus sebagai pengendali RC Car. Untuk berinteraksi dengan smartphone dan wifi, penggunaan development board NodeMCU berbasis ESP8266 digunakan untuk membangun RC Car. RC Car yang bisa dikontrol melalui smartphone tentunya sangat praktis dengan aplikasi yang dibuat sedemikian rupa dan nantinya bisa dikembangkan lagi untuk kebutuhan lainnya. Selain itu penulis juga membuat reminder / notifikasi dan Cloud on RC Car yang bertujuan untuk membatasi jam bermain anak, agar anak saat bermain RC Car tidak lupa waktu.
Kata kunci: Remote Control, Android, NodeMcu ESP8266, Wifi, Smartphone
ABSTRACT
The development of mobile robots today is very fast. One embodiment of the mobile robot itself is Radio Control Car or in short RC Car. RC Car control itself usually uses a joystick or special devices such as conventional remote controls. But with certain methods and development, RC Car can be made by utilizing control media such as Android smartphones. Smartphones that are generally owned by everyone can be collaborated with Wireless Fidelity technology (Wifi) and special applications as control of an RC Car. To interact with smartphones and wifi, the use of ESP8266-based NodeMCU development board is used to build RC Car. RC Car that can be controlled via smartphone is certainly very practical with applications that are made in such a way and later can be developed again for other needs. In addition the author also makes a reminder / notification and Cloud on RC Car which aims to limit children's playing hours, so that children while playing RC Cars do not forget the time.
Keywords: Remote Control, Android, NodeMcu ESP8266, Wifi, Smartphone
1
.PENDAHULUAN
Perkembangan robot Car saat ini sangatlah pesat. Robot Car sendiri merupakan jenis robot yang memiliki aktuator berupa roda untuk menggerakkan keseluruhan badan robot sehingga bisa berpindah dari satu titik ke titik lain. Salah satu perwujudan robot Car sendiri adalah Radio
Control Car atau singkatnya RC Car. Radio
Control Car sendiri merupakan perkembangan dari
Remote Control Car yang masih berbasis wired
atau terhubung kabel. Dengan media frekuensi radio, Radio Control Car ini dapat dikontrol dari jarak tertentu secara nirkabel sebagai penghubung kontrol dengan perangkatnya.
Remot Control Car sendiri biasanya menggunakan
joystick atau perangkat khusus seperti remote
control konvensional. Namun dengan metode dan
pengembangan tertentu, Remot Control Car dapat dibuat dengan memanfaatkan media kontrol seperti
smartphone Android. Smartphone yang umumnya
sudah dimiliki oleh setiap orang dapat dikolaborasikan dengan teknologi Wireless Fidelity (Wifi) dan aplikasi khusus sebagai kontrol sebuah
Remot Control Car. Untuk berinteraksi dengan
smartphone dan wifi, pemanfaatan development
board NodeMCU berbasis ESP8266 digunakan
59
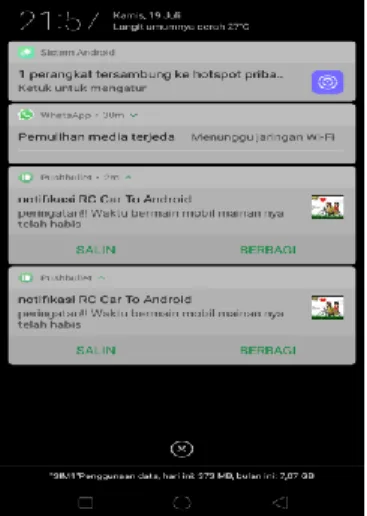
Remot Control Car yang dapat dikendalikan melalui smartphone tentulah sangat membantu bagi pengguna dengan aplikasi yang dibuat sedemikian rupa dan nantinya bisa dikembangkan lagi untuk kebutuhan-kebutuhan lain. Selain itu penulis juga membangun notifikasi/reminder pada Radio Control Car menggunakan Web Pushingbox, dengan reminder ini orang tua bisa membatasi waktu bermain pada robot control car tersebut. Reminder ini bertujuan untuk memberi pengingat kepada anak-anak. Selain itu orang tua juga bisa melihat rincian data pada penggunaan mobil remot
control berapa lama dan sering kah anak-anak itu
bermain mobil RC, data tersebut dapat dilihat di cloud yang di buat dengan menggunakan web Thingspeak. Dengan membangun NodeMCU Radio
Control Car ini, diharapkan Remot Control Car
dapat menjadi mobile robot canggih yang dapat digunakan sebagai penunjang aktifitas manusia nantinya. Misalnya dengan pengembangan lebih lanjut dan penambahan perangkat tertentu Radio
Control Car ini dapat menjadi media surveillance
atau pemantau dalam aspek security atau keamanan nantinya.
2.LANDASAN TEORI
NodeMCU adalah sebuah platform IoT yang bersifat opensource. Terdiri dari perangkat keras berupa System On Chip ESP8266 dari ESP8266 buatan Espressif System, juga firmware yang digunakan, yang menggunakan bahasa pemrograman scripting Lua. Istilah NodeMCU secara default sebenarnya mengacu pada firmware yang digunakan daripada perangkat keras
developmentkit.
NodeMCU bisa dianalogikan sebagai board arduino-nya ESP8266. NodeMCU telah
mem-package ESP8266 ke dalam sebuah board yang
kompak dengan berbagai fitur layaknya mikrokontroler plus kapabilitas akses terhadap Wifi juga chip komunikasi USB to serial.
Penggunaan NodeMCU sebagai papan pengembangan sistem Internet of Things sangat diminati. Contohnya adalah pemakaian modul ESP8266 dalam membangun sistem automation
dan security rumah, yang membuat user dapat
mengendalikan perangkat di dalam rumah seperti lampu atau kipas angin dari manapun melalui
remote dengan koneksi internet saja.
Gambar 1 NodeMcu ESP8266
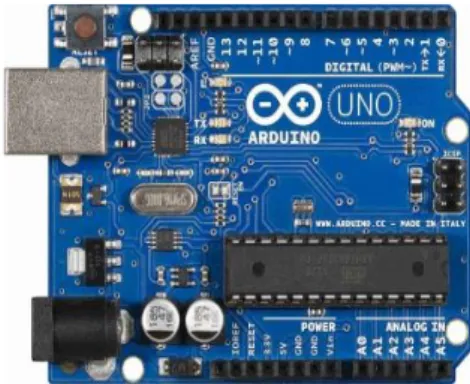
Arduino adalah physical computing atau single-board microcontroller yang bersifat open source. Arduino di rancang untuk memudahkan penggunaan elektronik dalam berbagai kegiatan. (Yudhistira, A.F.,2014).
Arduino adalah sebuah produk desingn system minimum mikrokontroler yang di buka secara bebas. Arduino menggunakan bahasa pemograman C yang telah di modifikasi dan sudah di tanamkan programmer bootloader yang berfungsi untuk menyembatani antara software compiler arduino dengan mikrokontroler (Masinambow V.,Najoan,M.E.I.,Lumenta,A.S.M.,2014).
Gambar 2 Arduino Uno
Android merupakan sebuah software yang digunakan pada perangkat mobile yang mencakup sistem operasi, middleware, dan aplikasi kunci yang dirilis oleh Google. Sehingga Android mencakup keseluruhan sebuah aplikasi mulai dari sistem operasi sampai pada pengembangan aplikasi itu sendiri.
Gambar 3 Android
Rimender adalah sebuah pesan yang membantu seseorang mengingat sesuatu, rimender dapat lebih bermanfaat ketika informasi konstektual di gunakan untuk menyajikan informasi pada waktu yang tepat dan tempat yang tepat. Reminder juga dapat di gunakan sebagai manajemen waktu yang berfungsi untuk memberi alarm peringatan berupa pemberitahuan berbasis lokasi, waktu maupun catatan yang berupa konstektual.
60
Gambar 4 Sistem Aplikasi Rimender
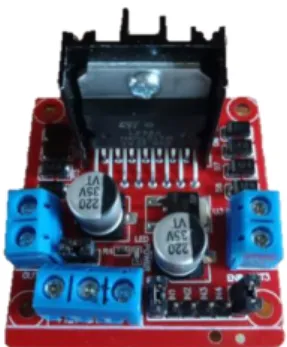
Motor Driver merupakan amplifier arus kecil,
fungsinya adalah mengambil sinyal kontrol berarus rendah dan mengubahnya menjadi arus yang lebih besar sehingga dapat menggerakkan sebuah motor.
Motor driver memiliki bermacam jenis, mulai dari
berdasarkan kapasitas tegangan maksimalnya, arus
output maksimum, load voltage, jumlah output dan
sebagainya. Hal ini membuat motor driver dapat digunakan untuk mexnggerakkan roda pada RC Car yang akan dibuat.
Salah satu produk motor driver yang banyak digunakan adalah IC L298N. IC L298N merupakan sebuah Integrated Circuit (IC) tipe H-Bridge yang mampu mengendalikan beban-beban induktif seperti relay, solenoid, motor DC dan motor
stepper.
Gambar 5 Motor Driver L298N Motor DC
Di dalam dunia elektonika, motor listrik digunakan untuk menggerakkan sesuatu. Ada dua jenis motor listrik, yaitu Motor AC dan Motor DC.
Motor DC adalah motor listrik yang membutuhkan suplai tegangan arus searah atau arus DC (Direct
Current) pada kumparan medan untuk diubah
menjadi energi mekanik. Kumparan medan pada motor disebut stator, dan kumparan jangkar disebut
rotor.
Gambar 6 Motor DC Prototype
Prototype adalah model atau simulasi dari semua aspek produk sesungguhnya yang akan di kembangkan, model ini harus bersifat representatif dari produk akhirnya. Pada pengembangan sistem seringkali terjadi keadaan dimanapengguna sistem sebenarnya telah mendefinisikan secara umum atau tujuan perangkat lunaknya meskipun belum mendefinisikan secara rinci masukan, proses dan keluaran.
3.ANALISA DAN PERANCANGAN
Analisa sistem berjalan merupakan gambaran tentang sistem yang saat ini sedang berjalan, Analisa yang difokuskan dalam hal ini adalah masalah mengenai mobil RC, saat ini mobil mainan RC banyak di minati anak-anak terutama pada anak laki-laki dari mulai anak kecil sampai dewasa.Untuk saat ini mobil RC masih menggunakan kendali joystick atau remot konvesional yang masih menggunakan sinyal radio ,sehingga untuk jarak kontroler nya masih pendek atau terbatas.Gambar 7. Mobil mainan Rc Saat ini Rancangan Sistem Usulan
Analisis sistem ini memegang peranan penting dalam memberikan arahan permasalahan dan menentukan tahapan proses pengerjaan selanjutnya. Permasalahan
Saat ini mobil mainan RC masih mengguinakan kontroller berbasis wired atau masih terhubung dengan kabel, selain jarak kontroll nya yang masih terbatas mobil mainan RC saat ini masih kurang efisien karena masih menggunakan remot kontrol yang berbentuk joystick atau remot konvensional. Rancangan Usulan
61
Analisis sistem ini memegang peranan penting dalam memberikan arahan permasalahan dan menentukan tahapan proses pengerjaan selanjutnya. 1.Perangkat Lunak (software)
Perangkat lunak (software) yang digunakan dalam perancangan sistem aplikasi ini adalah sebagai berikut :
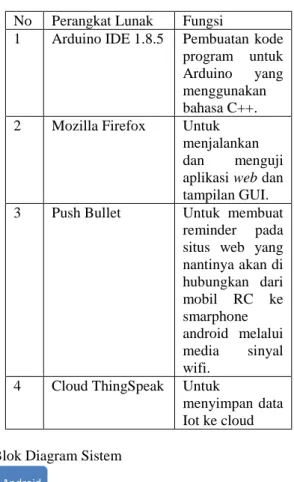
Tabel 1 Perangkat Lunak No Perangkat Lunak Fungsi
1 Arduino IDE 1.8.5 Pembuatan kode program untuk Arduino yang menggunakan bahasa C++. 2 Mozilla Firefox Untuk
menjalankan dan menguji aplikasi web dan tampilan GUI. 3 Push Bullet Untuk membuat
reminder pada situs web yang nantinya akan di hubungkan dari mobil RC ke smarphone android melalui media sinyal wifi.
4 Cloud ThingSpeak Untuk
menyimpan data Iot ke cloud Blok Diagram Sistem
Gambar 8 Blok Diagram Sistem
Pada dasarnya, prinsip kerja daripada RC Car ini adalah pengendalian RC Car itu sendiri menggunakan aplikasi khusus yang diinstall pada
smartphone Android. Pada awalnya, smartphone
Android dan RC Car terhubung dengan jaringan Wifi yang sama.
Perancangan Komunikasi
Seperti pada konsep awal yang di ambil, di kedua jurnal tersebut juga menggunakan konsep
manajemen sistem pada bangunan mobil mainan remot control management system (BMS), dimana akses komunikasinya bisa menggunakan jaringan wifi Sedangkan untuk dapat mengakses melalui PC, Laptop, atau melalui Smartphone di salah satu jurnal tersebut disebutkan juga dengan cara mengetikkan alamat (IP Address) pada halaman webbrowser dan user dapat melihat dan mengakses perangkat yang sudah terkoneksi pada jaringan yang sama.
Rancangan Kerja Sistem
Rancangan kerja sistem merupakan gambaran mengenai cara kerja sistem yang dibuat. Flowchart mewakili cara kerja, alur kerja serta beberapa fungsi yang akan dijalankan pada sistem atau aplikasi, flowchart yang dibuat berikut ini adalah cara kerja secara umum dari sistem yang akan dibuat.
Flowchart sistem sebagaimana (gambar 10) dimana
proses dimulai dari mengkoneksikan smartphone maupun NodeMCU RC Car ke jaringan Wifi. Setelah terkoneksi yang perlu dicatat adalah IP yang didapat dari jaringan Wifi pada NodeMCU haruslah diingat. Untuk melihatnya kita bisa mengeksekusi program khusus dan melihat IP di
serial monitor Arduino IDE. Saat menekan sebuah
tombol, maka data akan dikirimkan ke NodeMCU dalam bentuk request url ke IP NodeMCU. Misalkan saat menekan tombol forward (maju), dan anggap IP address Wifi yang didapat NodeMCU adalah 192.168.43.22. Maka request yang terbentuk adalah http:// http://192.168.43.22/forward.
Gambar 9 Flowchart Sistem
4.IMPLEMENTASI SISTEM
Tahap implementasi sistem merupakan tahap menerjemahkan perancangan berdasarkan hasil analisis dalam bahasa yang dapat dimengerti oleh mesin serta penerapan perangkat lunak pada keadaan yang sesungguhnya. Pada tahap implementasi ini akan dijelaskan bagaimana langkah-langkah dan tahapan yang dilakukan untuk membangun sistem monitoring atau pengendali agar hasil yang dicapai sesuai dengan yang telah dijelaskan pada tahap perancangan.
Kebutuhan Implementasi Android Wifi Node MCU 8266 L298N Motor DC
62
Pada lingkup pembangunan sistem ini perlu dijabarkan beberapa spesifikasi pendukung sistem baik perangkat keras (hardware) maupun perangkat lunak (software) yang digunakan, adapun spesifikasi yang digunakan dalam pembangunan sistem ini adalah sebagai berikut :
Perangkat Keras
a. Processor Amd Vision b. Ram 2 Gb
c. Hardisk 500 GB
d. Input Device (Keyboard dan Mouse) e. NodeMcu ESP8266 f. Motor Driver L298N g. Motor DC+Ban h. Chasis/Body i. Baterai j. Kabel Jumper 4.1.3 Perangkat Lunak a. Windows 7 32 bit b. Arduino IDE
c. Web Browser Mozilla Firefox d. Pushingbox
e. ThingSpeak Implementasi Perangkat Keras
Instalasi perangkat keras merupakan suatu proses instalasi atau perakitan alat, implementasi perangkat keras ini mencakup pembuatan rangkaian elektronik yang digunakan.
1.Mempersiapkan semua komponen-komponen yang dibutuhkan dalam perakitan RC Car, antara lain,
a.NodeMCU ESP8266 V3 (LoLin version)
NodeMCU (Gambar 4.1) sebagai “otak‟ dari RC Car yang menjadi pusat dari sistem. NodeMCU akan diprogram untuk menerima data dari aplikasi android dan meneruskan perintah ke motor driver L298N agar motor DC dapat bergerak sesuai yang diinginkan.
Gambar 10 NodeMcu V3 b.Motor Driver L298N
Motor Driver L298N (Gambar 11) berfungsi
sebagai pengatur geraknyamotor DC. Perangkat ini akan memberikan sinyal listrik kepada motor DC sesuai perintah yang diberikan oleh program NodeMCU 8266.
Gambar 11 Motor Driver L298N C.Motor DC belakang
Motor DC akan berfungsi sebagai motor penggerak RC Car setelah mendapat perintah dari
motor driver.
Gambar 12 Motor DC Belakang
D.Chasis/Car Body dan Roda Mobil Mainan/Replika
Chasis (Gambar 4.4) berfungsi sebagai body atau
rangka RC Car dimana komponen akan disusun. Agar bisa berjalan ditambahkan roda mobil mainan/replika.
Gambar 13 Casis/Bodi Depan E.Baterai
Baterai (Gambar 4.6) digunakan untuk menyuplai daya power motor driver L298N yang memerlukan tegangan kerja 5v-35v.
63
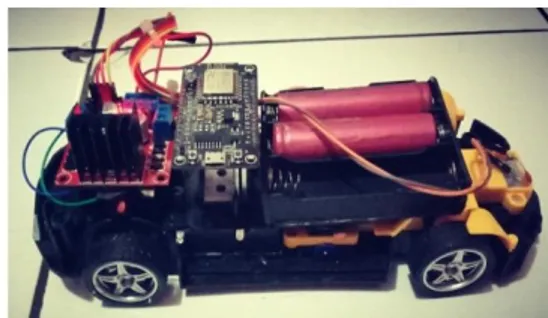
Semua perangkat yang telah tersedia dirakit menjadi RC Car yang diinginkan. Proses perakitan perangkat antara lain,
a.Penyusunan Komponen Pada Chasis
b.Penyusunan dilakukan agar RC Car terlihat lebih rapi dan diharapkan penyusunan dapat mempermudah tata letak pengkabelan nantinya.
Gambar 15 Penyusunan Komponen
Wiring (Pengkabelan)
Untuk bisa saling berinteraksi, tentulah NodeMCU dan L298N serta komponen pendukung lain harus terhubung agar dapat berfungsi dengan baik berikut adalah diagram pengkabelan dari rangkaian,
Gambar 16 Bentuk Pengkabelan
5.PENUTUP
Kesimpulan yang dapat ditarik berdasarkan penelitian, analisis serta pengujian yang telah dilakukan didalam uraian bab yang telah dibuat adalah sebagai berikut :
Rancang Bangun Prototype Mobil Radio Control Dengan Menggunakan NodeMcu Esp8266 dapat di lakukan menggunakan jaringan internet dengan menggunakan aplikasi Web Browser.
Tampilan menu aplikasi android ini dibuat dengan menggunakan aplikasi Web, dimana didalam pembuatannya menggunakan pilihan web view yang berfungsi untuk menampilkan halaman informasi dalam bentuk tampilan web.
2. Interaksi antara smartphone dan RC Car adalah melalui jaringan Wifi yang sama dan terkoneksi melalui IP local pada kedua perangkat.Untuk uji koneksi, sketch koneksi diupload ke NodeMCU dan jika terkoneksi dengan Wifi maka serial monitor akan menampilkan IP Address yang didapat untuk NodeMCU.
Saran
Hasil dari pembuatan sistem ini masih belum sempurna, dan masih mempunyai banyak kelemahan serta kekurangan. Berikut ini saran yang dapat digunakan untuk pengembangan sistem, antara lain:
RC Car yang dibangun masih dalam kondisi build
yang kurang sempurna, diharapkan pada pengembangan selanjutnya body RC Car dapat dibuat lebih solid, sehingga tingkat durabilitas atau ketahanan RC Car lebih baik.
Untuk pengembangan lebih lanjut, RC Car diharapkan mampu dikendalikan melalui jaringan yang berbeda ataupun via internet, sehingga jarak pengendalian bisa lebih jauh Dari segi sisi
hardware, untuk pengembangan selanjutnya RC
Car ini berpotensi menjadi mobile surveillance
robot dengan penambahan
DAFTAR PUSTAKA
[1] Andi Widiyanto,Nuryanto,.”Rancang Bangun Mobil Remot Control Android Dengan Arduino” Universitas Muhammadiah Magelang ,November (2015-Januari 2016) [2] David Setiawan,”Rancang Bangun Robot
Mobil Kontrol Sederhana menggunakan Arduino Berbasis Android System” Universitas Lancang Kuning ,(Desember 2016).
[3] Aston pada tahun 2009 “definisi awal IOT adalah Internet Of Things memiliki potensi untuk mengubah dunia seperti pernah di lakukan oleh internet”.
[4] Susanto,Tri. 2001. Bluetooth Teknologi Wirelles Untuk Layanan Multimedia Dengan Jangkauan Terbatas . Artikel Populer Elektro
Indonesia (Online)
http://www.elektroindonesia.com/elektro/khu3 6, Diakses pada 9 April 2015.
[5] L298N Motor Driver Datasheet, www.alldatasheet.com/datasheetpdf/pdf/2244 0/stmicroelectronics/l298n, diakses 6 Maret 2018