MAKALAH SISTEM INSTRUMENTASI
TEL. 61640
MOTOR LISTRIK
DISUSUN OLEH :
DENDO FIRDAUS 1510631160034
Dosen : Joko S. Saputro S.Pd., M.T.
Program Studi Teknik Elektro
Fakultas Teknik
Universitas Singaperbangsa Karawang
BAB I
1.1 Latar Belakang
Perkembangan teknologi dan ilmu pengetahuan mengubah cara pandang manusia dalam
menyelesaikan segala urusannya. Pekerjaan-pekerjaan yang sebelumnya tidak dapat
dilakukan manusia, kini dapat dilakukan dengan bantuan mesin atau alat. Bukan hanya itu,
posisi manusia sebagai pekerja juga dapat digantikan dengan robot atau mesin-mesin
otomatis. Sehingga, pekerjaan yang sebelumnya memakan waktu lama, kini dapat dilakukan
cepat.
Pada dasarnya gerak robot atau mesin meniru gerakan dari manusia. Salah satu
gerakan yang sering ditiru adalah gerakan tangan manusia, yang memiliki pergerakan pitch,
yaw, dan roll. Gerakan seperti ini banyak diaplikasikan pada robot-robot di industri manufatktur
seperti industri trasnportasi, elektronik,dan lain-lain.
Proses yang cepat dan tingkat ketilitian yang tinggi membuat robot banyak dipakai di
industri. Hal ini kemudian memicu inovasi-inovasi dalam sistem penggerak pada robot atau
mesin. Kemajuan teknologi pada motor elektronik, dan komputer membuat pergerakan yang
sebelumnya mustahil dilakukan robot menjadi mungkin untuk dilakukan.
1.2 Perumusan Masalah
Rumusan masalah pada makalah adalah sebagai berikut:
1. Pengretian aktuator mekanik?
2. Jenis-jenis Motor Listrik ?
1.3 Tujuan
Tujuan penulis membuat makalah adalah:
1. Sebagai tugas untuk mata kuliah Sistem Instrumentasi
2. Menjelaskan pengertian aktuator
BAB II
LANDASAN TEORI
2.1
Pengertian Aktuator
Sebuah aktuator adalah fungsional element yang menghubungkan bagian proses
informasi dari sebuah sistem kontrol elektronik dengan teknis atau non-teknis, semisal biologi,
proses. Aktuator bisa digunakan untuk mengendalikan aliran energi, massa, atau volume.
Satuan dari aktuator disebut energi atau power. Kontrol dari aktuator selalu menggunakan
daya elektrik minim, idealnya tanpa mengkonsumsi daya sama sekali.
Gambar 1. Strukur fungsi aktuator
Struktur dari fungsi sebuah aktuator dapat digambarkan dengan komponen dasar yakni
“
energy controller”
dan “
energy converter”
(Gambar 1.). Dimana variabel output dari energy
controller merupakan energi yang dihasilkan oleh sebuah power supply yang dikontrol via
variabel input yang biasanya menggunakan transistor dan katup.
Fungsi utama dari aktuator adalah sebagai komponen penguat dan pengkonversi daya,
kemudian menguatkan sinyal kontrol menjadi sinyal baru dengan daya yang besar dan sesuai
dengan daya yang dibutuhkan oleh plant.
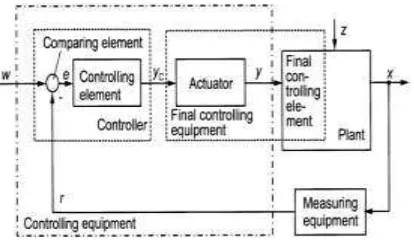
Gambar 2. Blok diagram closed loop control system.
Klasifikasi aktuator berdasarkan daya yang dhasilkan ada tiga yakni :
-
Aktuator elektrik
-
Aktuator pneumatik
-
Aktuator hidrolik
Sedangkan klasifikasi aktuator berdasarkan pergerakan ada dua yakni linier dan berputar.
BAB III
PEMBAHASAN
3.1 Jenis-Jenis Motor Listrik
3.1 Motor DC
adalah jenis motor listrik yang bekerja menggunakan sumber tegangan DC. Motor DC atau motor arus searah sebagaimana namanya, menggunakan arus langsung dan tidak langsung/direct-unidirectional. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
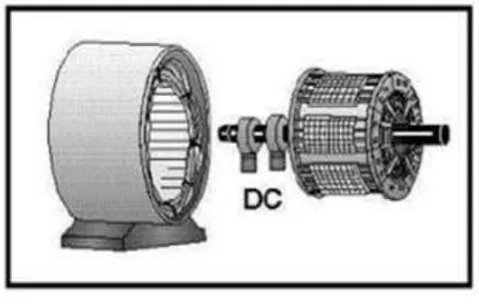
3.1.1 Komponen Utama Motor DC
Gambar diatas memperlihatkan sebuah motor DC yang memiliki tiga komponen utama :
1. Kutub Medan Magnet
Secara sederhada digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan kumparan motor DC yang menggerakan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber daya dari luar sebagai penyedia struktur medan.
2. Kumparan Motor DC
Bila arus masuk menuju kumparan motor DC, maka arus ini akan menjadi elektromagnet. kumparan motor DC yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, kumparan motor DC berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan selatan magnet berganti lokasi. Jika hal ini terjadi, arusnya berbalik untuk merubah kutub-kutub utara dan selatan kumparan motor DC.
3. Commutator Motor DC
Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam kumparan motor DC. Commutator juga membantu dalam transmisi arus antara kumparan motor DC dan sumber daya.
3.1.2 Kelebihan Motor DC
Keuntungan utama motor DC adalah dalam hal pengendalian kecepatan motor DC tersebut, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur :
Tegangan kumparan motor DC – meningkatkan tegangan kumparan motor DC akan meningkatkan kecepatan
Motor DC tersedia dalam banyak ukuran, namun penggunaannya pada umumnya dibatasi untuk beberapa penggunaan berkecepatan rendah, penggunaan daya rendah hingga sedang seperti peralatan mesin dan rolling mills, sebab sering terjadi masalah dengan perubahan arah arus listrik mekanis pada ukuran yang lebih besar. Juga, motor tersebut dibatasi hanya untuk penggunaan di area yang bersih dan tidak berbahaya sebab resiko percikan api pada sikatnya.
Motor DC juga relatif mahal dibanding motor AC. Hubungan antara kecepatan, flux medan dan tegangan kumparan motor DC ditunjukkan dalam persamaan berikut :
Gaya elektromagnetik : E=K Φ N
Torque : T= K Φ Ia
Dimana:
E =gaya elektromagnetik yang dikembangkan pada terminal kumparan motor DC (volt)
Φ = flux medan yang berbanding lurus dengan arus medan
N = kecepatan dalam RPM (putaran per menit) T = torque electromagnetik
Ia = arus kumparan motor DC
K = konstanta persamaan
3.1.3 Jenis-Jenis Motor DC
1. Motor DC Sumber Daya Terpisah/ Separately Excited
Jika arus medan dipasok dari sumber terpisah maka disebut motor DC sumber daya terpisah / separately excited.
2. Motor DC Sumber Daya Sendiri/ Self Excited: Motor Shunt
Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan kumparan motor DC (A) seperti diperlihatkan dalam gambar dibawah. Oleh karena itu total arus dalam jalur merupakan penjumlahan arus medan dan arus kumparan motor DC.
Berikut tentang kecepatan motor shunt (E.T.E., 1997):
Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga torque tertentu setelah kecepatannya berkurang, lihat Gambar diatas dan oleh karena itu cocok untuk penggunaan komersial dengan beban awal yang rendah, seperti peralatan mesin.
Kecepatan dapat dikendalikan dengan cara memasang tahanan dalam susunan seri dengan kumparan motor DC (kecepatan berkurang) atau dengan memasang tahanan pada arus medan (kecepatan bertambah).
3. Motor DC Daya Sendiri: Motor Seri
Dalam motor seri, gulungan medan (medan shunt) dihubungkan secara seri dengan gulungan kumparan motor DC (A) seperti ditunjukkan dalam gambar dibawah. Oleh karena itu, arus medan sama dengan arus kumparan motor DC. Berikut tentang kecepatan motor seri (Rodwell International Corporation, 1997; L.M. Photonics Ltd, 2002) :
Kecepatan dibatasi pada 5000 RPM
Harus dihindarkan menjalankan motor seri tanpa ada beban sebab motor akan mempercepat tanpa terkendali.
Motor-motor seri cocok untuk penggunaan yang memerlukan torque penyalaan awal yang tinggi, seperti derek dan alat pengangkat hoist seperti pada gambar berikut.
Karakteristik Motor DC Seri
4. Motor DC Kompon/Gabungan
Motor Kompon DC merupakan gabungan motor seri dan shunt. Pada motor kompon, gulungan medan (medan shunt) dihubungkan secara paralel dan seri dengan gulungan kumparan motor DC (A) seperti yang ditunjukkan dalam gambar dibawah. Sehingga, motor kompon memiliki torque penyalaan awal yang bagus dan kecepatan yang stabil. Makin tinggi persentase penggabungan (yakni persentase gulungan medan yang dihubungkan secara seri), makin tinggi pula torque penyalaan awal yang dapat ditangani oleh motor ini. Contoh, penggabungan 40-50% menjadikan motor ini cocok untuk alat pengangkat hoist dan derek, sedangkan motor kompon yang standar (12%) tidak cocok (myElectrical, 2005).
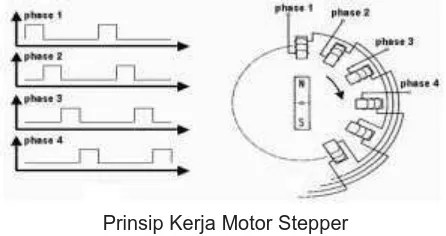
3.2 Motor stepper
adalah salah satu jenis motor dc yang dikendalikan dengan pulsa-pulsa digital. Prinsip kerja motor stepper adalah bekerja dengan mengubah pulsa elektronis menjadi gerakan mekanis diskrit dimana motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor stepper tersebut.
3.2.1 Kelebihan Motor Stepper
Kelebihan motor stepper dibandingkan dengan motor DC biasa adalah :
1. Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih mudah diatur. 2. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
3. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
4. Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik (perputaran)
5. Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor seperti pada motor DC
6. Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya
7. Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
3.2.2 Prinsip Kerja Motor Stepper
Prinsip kerja motor stepper adalah mengubah pulsa-pulsa input menjadi gerakan mekanis diskrit. Oleh karena itu untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
Berikut ini adalah ilustrasi struktur motor stepper sederhana dan pulasa yang dibutuhkan untuk menggerakkannya :
Prinsip Kerja Motor Stepper
Gambar diatas memberikan ilustrasi dari pulsa keluaran pengendali motor stepper dan penerpan pulsa tersebut pada motor stepper untuk menghasilkan arah putaran yang bersesuaian dengan pulsa kendali.
3.2.3 Jenis-Jenis Motor Stepper
Berdasarkan struktur rotor dan stator pada motor stepper, maka motor stepper dapat dikategorikan dalam 3 jenis sebagai berikut :
Motor Stepper Variable Reluctance (VR)
Motor stepper tipe variable reluctance (VR)
Motor Stepper Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang berlawanan. Dengan adanya magnet permanen, maka intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step) yang rendah yaitu antara 7,50 hingga 150 per langkah atau 48 hingga 24 langkah setiap putarannya. Berikut
ini adalah ilustrasi sederhana dari motor stepper tipe permanent magnet :
Motor Stepper Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gigi-gigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,60 hingga 0,90 per langkah atau
100-400 langkah setiap putarannya. Berikut ini adalah penampang melintang dari motor stepper tipe hibrid :
Motor stepper tipe hibrid
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat dibagi menjadi 2 jenis yaitu motor stepper unipolar dan motor stepper bipolar.
Motor Stepper Unipolar
Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena hanya memerlukan satu switch / transistor setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan seperti pada gambar berikut.
Motor Stepper Bipolar
ntuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam hal torsi yang lebih besar untuk ukuran yang sama.
3.3
Motor Induksi
Motor induksi adalah salah satu jenis dari motor-motor listrik yang bekerjaberdasarkan induksi elektromagnet. Motor induksi memiliki sebuah sumber energilistrik yaitu di sisi stator, sedangkan sistem kelistrikan di sisi rotornya di induksikan melalui celah udara dari stator dengan media elektromagnet. Hal inilah yang menyebabkannya diberi nama motor induksi. Adapun penggunaan motor induksi di industri ini adalah sebagai penggerak, seperti untuk blower, kompresor, pompa, penggerak utama proses produksi atau mill, peralatan workshop seperti mesin-mesin bor, grinda, crane, dan sebagainya.
Dalam Penggunaannya, sebagian motor induksi tiga phasa memerlukan pengereman seperti yang terdapat pada motor crane. Pengereman dilakukan agar motor berhenti sesuai dengan letak dan posisi yang kita inginkan. Ada banyak cara pengereman yang bisa dilakukan untuk memberhentikan motor, akan tetapi dalam laporan ini kami akan membahas tentang pengereman motor dengan menggunakaan Coil Brake DC.
Pengereman motor dengan menggunakaan Coil Brake DC digunakan untuk pemberhentian putaran rotor motor induksi dengan supply tegangan DC (direct current). Dimana tegangan AC diubah menjadi DC dengan menggunakan Rectifier sebagai supply Coil Brake.
Pada prinsipnya motor ini dalam keadaan normal atau tidak bertegangan maka coil break akan menahan rotor motor untuk tidak berputar sedangkan dalam keadaan bertegangan coil break akan melepas rotor motor untuk berputar.
Akan tetapi pada makalah ini menggunakan motor induksi 3 fasa.
Motor Induksi
Motor induksi merupakan motor arus bolak-balik (ac) yang paling Iuas digunakan. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan anus yang terinduksi sebagai akibatadanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magneticfield) yang dihasilkan oleh arus stator.
Belitan stator yang dihubungkan dengan satu sumber tegangan tiga fasa akanmenghasilkan medan magnet yang berputar dengan kecepatan sinkron (ns=120f/2p).Medan putar pada stator tersebut akan memotong konduktor-konduktor pada rotor,sehingga terinduksi arus, dan sesuai dengan hukum lentz, rotor pun akan turutberputar mengikuti medan putar stator. Perbedaan putar relatif antara stator dan rotordisebut slip.
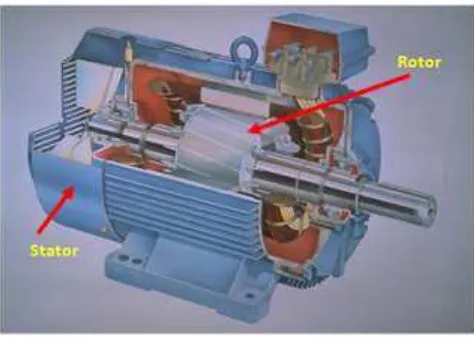
3.3.1 Konstruksi
Sebuah motor induksi terdiri dari dua bagian utama yaitu rotor dan stator.Rotor merupakan bagian yang berputar dan stator merupakan bagian yang diam.
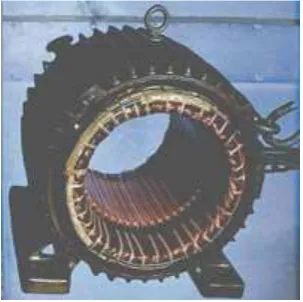
a. Stator
Gambar Stator
Stator mempunyai bagian :
· Gandar, fungsinya sebagai penopang dan sebagai pelindung bagian dalam mesin.
· Inti stator, terbuat dari laminasi logam yang disusun berlapis.
· Kumparan stator.
b. Rotor terdiri dari :
· Inti rotor
· Kumparan rotor
Adapun jenis rotor dalam motor induksi tiga fasa adalah :
Motor induksi jenis ini mempunyai rotor dengan belitan kumparan tiga fasa sama seperti kumparan stator. Kumparan stator dan rotor juga mempunyai jumlah kutub yang sama. Penambahan tahanan luar sampai harga tertentu, dapat membuat kopel mula mencapai harga kopel maksimumnya. Motor induksi dengan rotor belitanmemungkinkan penambahan (pengaturan) tahanan luar. Tahanan luar yang dapat diatur ini dihubungkan ke rotor melalui cincin (gambar 3.3) selain untuk menghasilkan kopel mula yang besar, tahanan luar tadi diperlukan untuk membatasi atus mula yang besar pada saat start. Disamping itu dengan mengubah-ubah tahanan luar, kecepatan motor dapat diatur.
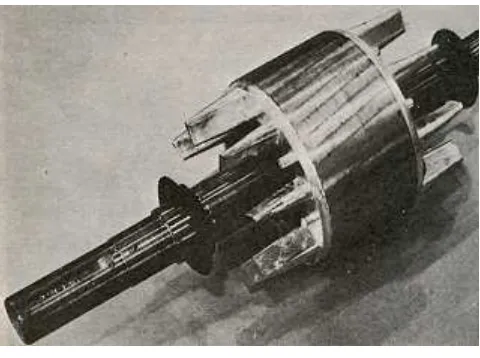
c. Rotor Sangkar
Motor induksi jenis ini mempunyai motor dengan kumparan yang terdiri atas beberapa batang konduktor yang disusun sedemikian rupa hingga mempunyai sangkar tupai (lihat gambar 3.4) konstruksi rotor seperti ini sangat sederhana bila dibandingkan dengan rotor mesin listrik lainnya. Dengan demikian harganya pun murah, kama konstruksinya yang demikian, padanya tidak 'nankin diberikanpengaturan tahana luar seperti pada motor induksi dengan motor belitan. Untuk membatasi arus mula yang besar, tegangan sumber harus dikurangi dan biasanya digunakan ototransformator atau saklar Y – A. Tetapi berkurangnya arus akan berakibat berkurangnya kopel
Gambar Rotor Sangkar
c. Celah udara, untuk memberikan keleluasaan rotor untuk berputar.
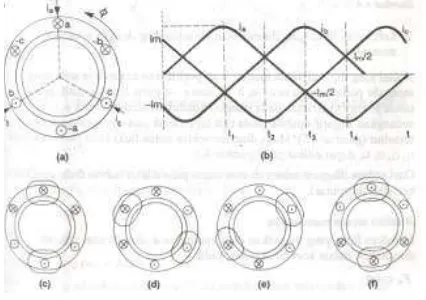
3.3.2 Medan Putar
Perputaran motor pada mesin arus bolak-balik ditimbulkan oleh adanya medan putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, umurnnya tiga fasa. Hubungan dapat berupa bintang atau delta.
Disini akan dijelaskan bagannana terjadinya medan putar itu. Perhatikan gambar dibawah ini.
Gambar Medan Putar
Misalnya kumparan a-a; b-b; c-c dihubungkan 3 fasa, dengan fasa rnasing-masing 120°(gambar 3.4a) dan dialiri arus sinusoid. Distribusi ia, ib, is seba gai fungsi waktu adalah seperti gambar 3.4b. pada keadaan tl, t2, t3, dan 14 fluks resultan yang ditimbulkan oleh kumparan tersebut masing-masing adalab seperti gambar 3.4 c, d, e, dan f. Pada t1 fluks resultannya mempunyai arah sama dengan arah fluks yang dihasilkan oleh kumparan a-a; sedangkan t2 fluks resultannya dihasilkan oleh kumparan b-b. Untuk t4, fluks resultannya berlawanan arah dengan fluks resultan yang dihasilkan pada saat tl. Dari gambar 3.4 c, d, e, dan f tersebut terlihat bahwa fluks resultan ini akan berputar satu kali. Oleh karena itu, untuk mesin dengan jumlah kutub lebih dari dua, kecepatan sinkron dapat
Prinsip kerja motor induksi adalah berdasarkan induksi elektromagnet, dimana tegangan sumber diberikan pada kumparan stator, sehingga inti besi di stator menjadi magnet, kemudian menginduksikan magnet tersebut ke rotor. Dengan demikian, di kumparan rotor akan terinduksi tegangan karena kumparan rotor merupakan loop tertutup, maka akan mengalir arus di kumparan rotor tersebut yang berinteraksi dengan medan magnet di stator, sehingga timbullah gaya putar pada rotor yang mendorong rotor untuk berputar dengan kecepatan sinkron dan akan mengikuti persamaan
……….. (3.2)
Dengan :
N= kecepatan putar dari medan putar stator dalam rpm
F = Frekuensi arus dan tegangan stator
Garis-garis gaya fluks dari stator tersebut yang berputar akan memotong panghantar-panghantar rotor sehingga pada penghantar rotor tersebut timbul Gaya Gerak Listrik (GGL) atau tegangan induksi.
Berhubung kumparan rotor merupakan rangkaian yang tertutup maka pada kumparan tersebut mengalir arus. Arus yang mengalir pada penghantar rotor yang berada dalam medan magnet berputar dari stator, maka pada penghantar rotor tersebut timbul gaya-gaya yang berpasangan dan berlawanan arah, gaya tersebut menimbulkan torsi yang cenderung memutar rotornya, rotor akan berputar dengan kecepatan (Nr) mengikuti putaran medan putar stator (Ns).
3.4 MOTOR AC - SINKRON
Motor sinkron adalah motor AC yang bekerja pada kecepatan tetap pada sistim frekwensi tertentu. Motor ini memerlukan arus searah (DC) untuk pembangkitan daya dan memiliki torque awal yang rendah, dan oleh karena itu motor sinkron cocok untuk penggunaan awal dengan beban rendah, seperti kompresor udara, perubahan frekwensi dan generator motor. Motor sinkron mampu untuk memperbaiki faktor daya sistim, sehingga sering digunakan pada sistim yang menggunakan banyak listrik.
3.4.1 Komponen utama motor sinkron adalah:
1. RotorPerbedaan utama antara motor sinkron dengan motor induksi adalah bahwa rotor mesin sinkron berjalan pada kecepatan yang sama dengan perputaran medan magnet. Hal ini memungkinkan sebab medan magnit rotor tidak lagi terinduksi. Rotor memiliki magnet permanen atau arus DC-excited, yang dipaksa untuk mengunci pada posisi tertentu bila dihadapkan dengan medan magnet lainnya.
2. Stator
Stator menghasilkan medan magnet berputar yang sebanding dengan frekwensi yang dipasok.
Gambar Motor Sinkron.
3.4.2 Prinsip Kerja Motor AC sinkron
Motor sinkron menggunakan rotor belitan. Jenis ini mempunyai kumparan yang ditempatkan pada slot rotor. Slip ring dan sikat digunakan untuk mensuplai arus kepada rotor.
Prinsip Motor Sinkron secara umum : - Belitan medan terdapat pada rotor - Belitan jangkar pada stator
Pada motor sinkron, suplai listrik bolak-balik (AC ) membangkitkan fluksi medan putar stator (Bs) dan suplai listrik searah (DC) membangkitkan medan rotor (Bs). Rotor berputar karena terjadi
interaksi tarik-menarik antara medan putar stator dan medan rotor. Namun dikarenakan tidak adanya torka-start pada rotor, maka motor sinkron membutuhkan prime-mover yang memutar rotor hingga kecepatan sinkron agar terjadi coupling antara medan putar stator (Bs) dan medan rotor (Br).
3.4.3 Kontruksi Motor AC Sinkron
Gambar Kontruksi Motor Sinkron
Seperti yang telah diulas diatas, bahwa komponen penting dari motor sinkron adalah stator dan rotor, yang mana komponen ini adalah komponen umum atau dasar pada sebuah motor.
Motor sinkron adalah motor ac yang memiliki kecepatan konstan, namunkecepatan dapat
diatur karena kecepatannya berbanding lurus dengan frekuensi. Motor sinkron secara khusus sangat baik digunakan untuk kecepatan rendah. Kelebihan dari motor sinkron ini antara lain, dapat dioperasikan pada faktor daya lagging maupun leading, tidak ada slip yang dapat mengakibatkan adanya rugi-rugi daya sehingga motor ini memiliki efisiensi tinggi. Sedangkan kelemahan dari motor sinkron adalah tidak mempunyai torka mula, sehingga untuk starting diperlukan cara-cara tertentu. Bila metode starting telah dapat dikembangkan kemudian hari, maka motor ini akan lebih unggul dibandingkan motor listrik yang lain.
3.4.4 Penggunaan Motor AC sinkron
3.4.5 Proteksi Motor AC sinkron
Motor dapat menjadi generator, apabila energi listrik dirubah menjadi energi mekanik disebut motor, tapi apabila energi mekanik menjadi energi listrikdisebut generator. Jadi "di atas kertas" motor itu bisa jadi generator, tapi bila melihat fungsi dan konstruksinya akan berbeda, jadi dalam keadaan khusus motor akan menjadi generator, atau generator menjadi motor. Namun untuk mencegah hal tersebut dipasang proteksi khusus agar motor tidak menjadi menjadi generator atau sebaliknya.
Ada banyak metode kendali motor AC (motor induksi, motor sinkron) dengan kelebihan dan kekurangannya. Namun secara umum metode ini dapat dikelompokkan sebagai berikut:
1. Kendali Skalar (v/f Konstan)
2. Kendali Berorientasi Medan (Field Oriented Control, FOC)
3. Kendali Torsi Langsung (Direct Torque Control, DTC)
3.4.6 Pengukuran Motor AC sinkron
Pembangkitan Torka
Interaksi antara medan putar stator (Bs) dan medan rotor (Br) yang membangkitkan torka seperti
terlihat dalam persamaan berikut.
T = Bsx Bs(sin δ)
δ disebut sudut beban karena besarnya tergantung pembebanan. Pada saat beban nol nilai
δ=0. Jika dibebani, medan rotor tertinggal dari rotor sebesar δ, kemudian berputar sama lagi. Beban maksimum tercapai pada δ=90o. Jika beban dinaikkan terus melebihi batas itu, maka
motor akan kehilangan sinkronisasi dan akhirnya akan berhenti.
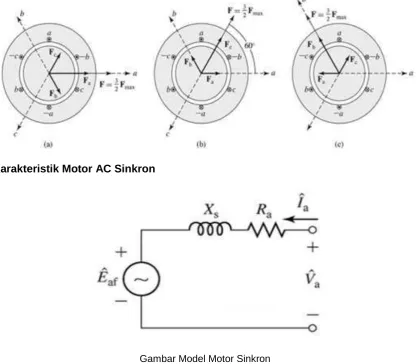
Pembangkitan medan putar
· Pada Motor sinkron 3 fasa, mengalir arus seimbang pada tiap fasa dengan beda sudut fasa 120o
ia = Imsin ωt
ib = Imsin (ωt-120o)
ic = Im sin (ωt-240o)
Tiap arus fasa membangkitkan ggm F yang merupakan fungsi sudut ruang ө seperti ia à Fa.cos θ.
Dengan Fa=Fm. sin ωt
Maka ggm F tiap fasa yang dibangkitkan
Fa = Fmsin ωt.cos θ
Fb = Fmsin (ωt-120o).cos (θ-120o)
Fc = Fmsin (ωt-240o) .cos (θ-240o)
Dan jika kemudian disederhanakan dengan persamaan trigonometri akan diperoleh:
F(θ,t) = 3/2 Fm.cos (θ-ωt)
Yang berarti resultan-mmf adalah medan putar sebagai fungsi dari ruang dan waktu, seperti terlihat dalam gambar berikut:
3.4.7
Karakteristik Motor AC Sinkron
Gambar Model Motor Sinkron
Pengaruh Penguatan Medan
Ø Untuk membangkitkan fuksi dibutuhkan daya reaktif yang bersifat induktif.
Ø Pada motor sinkron, ggm dibangkitkan arus medan (DC) pada belitan rotor. Jika arus medan ini
cukup, maka motor tidak membutuhkan suplai energi reaktif dari sisi stator yang bersumber dari
jaringan listrik. Sehingga motor bekerja dengan faktor daya = 1.
Ø Jika penguatan arus medan kurang, maka motor sinkron akan menarik daya reaktif yang bersifat
induktif dari sisi stator. Sehingga motor bekerja dengan factor daya(pf) terbelakang (lagging). Artinya
Ø Kebalikannya jika kelebihan penguatan arus medan, maka motor sinkron akan menarik daya reaktif
yang bersifat kapasitif dari sisi stator. Sehingga motor bekerja dengan factor daya (pf) mendahului
(leading). Artinya motor menjadi pembangkit daya reaktif yang bersifat kapasitif.
Kondensor Sinkron
Seperti diuraikan di atas, jika motor sinkron kelebihan penguatan arus medan, maka motor sinkron
akan menarik daya reaktif yang bersifat kapasitif dari sisi stator. Sehingga motor bekerja dengan factor
daya (pf) mendahului (leading). Artinya motor menjadi pembangkit daya reaktif yang bersifat
kapasitif. Sehingga motor sinkron dapat digunakan untuk memperbaiki factor daya (pf). Dalam hal ini
motor sinkron disebut Kondensor sinkron.
Karakteristik Torka dan Sudut daya
Gambar diatas memperlihatkan bahwa Torka adalah fungsi sin δ, dengan δ adalah sudut daya.
Pada motor sinkron nilai δ negatif dan nilainya positif pada generator sinkron. Torka maksimum dicapai pada δ= +/- 90o. Jika melebihi batas itu, maka motor atau generator akan kehilangan stabilitas dan
3.5 Motor servo
adalah sebuah motor DC dengan sistem umpan balik tertutup di mana posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo.
3.5.1 Bentuk Motor Servo
Bentuk motor servo yang banyak beredar di pasaran
3.5.2 Keunggulan Motor Servo
Keunggulan dari penggunaan motor servo adalah :
Tidak bergetar dan tidak ber-resonansi saat beroperasi.
Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
Penggunaan arus listik sebanding dengan beban yang diberikan.
Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
Tidak berisik saat beroperasi dengan kecepatan tinggi.
3.5.3 Kelemahan Motor Servo
Keunggulan dari penggunaan motor servo adalah :
Tidak bergetar dan tidak ber-resonansi saat beroperasi.
Daya yang dihasilkan sebanding dengan ukuran dan berat motor.
Penggunaan arus listik sebanding dengan beban yang diberikan.
Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
Tidak berisik saat beroperasi dengan kecepatan tinggi.
3.5.4 Aplikasi Motor Servo
Contoh motor servo 180o yang sering digunakan untuk kaki robot
3.5.5 Komponen Penyusun Motor Servo
Motor servo pada dasarnya dibuat menggunakan motor DC yang dilengkapi dengan controler dan sensor posisi sehingga dapat memiliki gerakan 0o, 90o, 180o atau 360o. Berikut adalah komponen
internal sebuah motor servo 180o.
Tiap komponen pada motor servo diatas masing-masing memiliki fungsi sebagai controler, driver, sensor, girbox dan aktuator. Pada gambar diatas terlihat beberapa bagian komponen motor servo. Motor pada sebuah motor servo adalah motor DC yang dikendalikan oleh bagian controler, kemudian komponen yang berfungsi sebagai sensor adalah potensiometer yang terhubung pada sistem girbox pada motor servo.
3.5.6 Cara Mengendalikan Motor Servo
Untuk menjalankan atau mengendalikan motor servo berbeda dengan motor DC. Karena untuk mengedalikan motor servo perlu diberikan sumber tegangan dan sinyal kontrol. Besarnya sumber tegangan tergantyung dari spesifikasi motor servo yang digunakan. Sedangkan untuk mengendalikan putaran motor servo dilakukan dengan mengirimkan pulsa kontrol dengan frekuensi 5o Hz dengan periode 20ms dan duty cycle yang berbeda. Dimana untuk menggerakan motor servo sebesar 90o diperlukan pulsa dengan ton duty cycle pulsa posistif 1,5ms dan unjtuk bergerak sebesar
180o diperlukan lebar pulsa 2ms. Berikut bentuk pulsa kontrol motor servo dimaksud.
BAB IV
KESIMPULAN
Aktuator merupakan komponen penggerak pada sebuah sistem kontrol, berfungsi
sebagai komponen penguat dan pengkonversi daya, kemudian menguatkan sinyal kontrol
menjadi sinyal baru dengan daya yang besar dan sesuai dengan daya yang dibutuhkan oleh
plant.
Disini penulis membahas tentang Aktuator elektrik (mekanik) yang mana,
merupakan aktuator yang mengubah energi listrik menjadi energi gerak dengan menggunakan
prinsip elektromagnet.
Motor adalah suatu alat yang mengubah energi listrik menjadi energi mekanik.
Seperti kutub yang saling tarik menarik; tak sama dengan saling menyeran satu
sama lainnya.
Putaran pada motor menghasikan putaran atau lilitan yang disebut dengan
momen atau torque.
Motor listrik dikelompokkan menjandi dua secara umum yaiti motor listrik AC
dan motor listrik DC.
Series motor mempunyai gulungan yang dihubungkan secara seri dengan
armatur. Mempunyai momen yang besar.
Prinsip kerja motor listrik menggunakan aturan tangan kiri flemming.
Sistem stater adalah salah satu aplikasi motor listrik di bidang otomotif.
Sekian yang dapat penulis bahas mengenai Jenis
–
jenis Motor Listrik apabila
masih banyak kekurangan mohon dimengerti dan semoga tulisan ini dapat bermanfaat bagi
Daftar Pustaka
https://www.scribd.com/document/317087341/MAKALAH-JENIS-JENIS-AKTUATOR
https://ilmulistrikzar.blogspot.co.id/2015/07/motor-sinkron.html
http://zonaelektro.net
http://elektronika-dasar.web.id/definisi-dan-karakteristik-motor-listrik-induksi