YOGYAKARTA 2021
Disusun oleh :
Thomas Dwi Agung Wibowo NIM : 175114044
JURUSAN TEKNIK ELEKTRO FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA 2021
FINAL PROJECT
ROOM TRAINING AND SPRAYING METHODS ON LEGGED DISINFECTANT SPRAYING ROBOT MICROCONTROLER BASED
Arranged by:
Thomas Dwi Agung Wibowo NIM : 175114044
DEPARTMENT OF ELECTRICAL ENGINEERING FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
iii
Thomas Dwi Agung Wibowo NIM : 175114044
Telah disetujui oleh :
MIKROKONTROLER
Disusun oleh :
Pembimbing :
Martanto, S.T., M.T. Tanggal : 11 September 2021
iv
LEMBAR PENGESAHAN
TUGAS AKHIR
METODE PENYUSURAN RUANGAN DAN PENYEMPROTAN PADA ROBOT BERKAKI PENYEMPROT DISINFEKTAN BERBASIS
MIKROKONTROLER
Disusun oleh:
Thomas Dwi Agung Wibowo NIM : 175114044
Telah dipertahankan di depan penguji pada tanggal
Telah disetujui oleh:
Susunan Panitia Penguji :
Nama Lengkap Tanda Tangan
Ketua : Ir. Tjendro. M.Kom ……….
Sekretaris : Martanto, M.T. ……….
Anggota : Djoko Untoro, S.T., M.T.
………
Yogyakarta, September 2021 Fakultas Sains dan Teknologi Universitas Sanata Dharma Dekan
Sudi Mungkasi, S.Si., M.Math.Sc, Ph.D.
v
Yogyakarta, 11 September 2021
Thomas Dwi Agung Wibowo
vi
MOTTO :
“ Challenge your self and make your own “
- Thomas Dwi Agung Wibowo -
Skripsi ini kupersembahkan untuk
Yesus Kristus Pembimbingku yang setia
Keluarga tercinta
Semua teman – teman yang baik
vii
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul :
METODE PENYUSURAN RUANGAN DAN PENYEMPROTAN PADA ROBOT BERKAKI PENYEMPROT DISINFEKTAN BERBASIS
MIKROKONTROLER
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di Internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 11 September 2021
(THOMAS DWI AGUNG WIBOWO)
INTISARI
viii
Perkembangan robot menjadi sangat penting pada saat ini. Robot akan terus berkembang dari tahun ke tahun. Di Indonesia, Kementrian Riset Teknologi dan Pendidikan Tinggi Republik Indonesia mengadakan Kontes Robot Indonesia (KRI) setiap tahunnya.
Terdapat divisi Kontes Robot Pemadam Api Indonesia (KRPAI) dalam KRI. Seiring perkembangan zaman KRPAI tidak hanya melakukan pemadaman api saja, pada tahun ini KRPAI diberi tugas khusus sesuai dengan masa pandemi COVID-19. Robot diminta melakukan penyemprotan cairan disinfektan ke setiap ruangan.
Pada penelitian ini robot dirancang untuk dapat menyusuri lorong dengan menggunakan algoritma wall follower dengan nilai referensi menggunakan sensor jarak.
robot kemudian dapat mengenali ruangan dengan cara mendeteksi garis pada pintu masuk ruangan, dengan sensor warna robot dapat mendeteksi ruangan dan masuk ke dalam ruangan tersebut, kemudian robot dituntut untuk melaksanakan tugas penyemprotan pada ruangan itu. Penyemprotan yang dilakukan oleh robot menggunakan penyemprotan terarah. Robot akan diuji dengan 1 konfigurasi ruang sesuai dengan aturan KRPAI 2021.
Berdasarkan pengujian yang dilakukan, robot dapat menjalankan misi yaitu penyemprotan disinfektan pada setiap ruangan dengan keberhasilan 100%. Setiap sensor yang digunakan dapat bekerja dan berjalan dengan baik. Sensor jarak memiliki keberhasilan 96,2%, sensor kompas memiliki keberhasilan 92,3%, pengolahan fuzzy memiliki keberhasilan 99,4%, dan sensor warna dapat mendeteksi ruangan dengan tingkat keberhasilan 100% dan sensor warna mampu melakukan pembacaan arena dengan intensitas cahaya sesuai dengan aturan KRPAI 2021 yaitu minimal 300 lux.
Kata kunci : KRPAI berkaki, penyemprotan disinfektan, mikrokontroler, fuzzy logic
ix
given a special task in accordance with the COVID-19 pandemic.The robot is required to spray disinfectant liquid into each room.
In this study the robot was designed to be able to walk down the aisle using a wall follower algorithm with reference values using distance sensors.The robot can then recognize the room by detecting the lines at the entrance of the room, with the color sensor the robot can detect the room and enter the room, then the robot is required to carry out the task of spraying in the room.Spraying is carried out by robots using directed spraying. The robot will be tested with 1 space configuration in accordance with KRPAI 2021 rules.
Based on the tests, the robot can carry out the mission of spraying disinfectant in each room with 100% success.Each sensor can work and run properly.The distance sensor has a success of 96.2%, the compass sensor has a success of 92.3%, fuzzy processing has a success of 99.4%, and the color sensor can detect the room with a 100% success rate and the color sensor is able to perform arena readings with light intensity in accordance with KRPAI 2021 rules which is at least 300 lux.
Key words : KRPAI legged, disinfectant spraying, microcontroller, fuzzy logic
KATA PENGANTAR
x
Puji syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas berkat dan rahmat yang telah dicurahkan kepada penulis, sehingga penulis bisa menyelesaikan dengan judul
“METODE PENYUSURAN RUANGAN DAN PENYEMPROTAN PADA ROBOT BERKAKI PENYEMPROT DISINFEKTAN BERBASIS MIKROKONTROLER “.
Skripsi ini disusun untuk memenuhi persyaratan memperoleh gelar Strata Satu (S1) pada Jurusan Teknik Elektro, Fakultas Sains dan Teknologi, Universitas Sanata Dharma. Pada kesempatan kali ini penulis juga tidak lupa untuk mengucapkan terima kasih kepada berbagai pihak yang sudah membantu dalam melaksanakan kerja praktik hingga penyusunan laporan kerja praktik ini dapat terselesaikan dengan baik kepada :
1. Agustinus Sarmidi dan Ananingsih, orang tuaku.
2. Bapak Martanto M.T., selaku Dosen Pembimbing Tugas Akhir yang sudah menerima saya dan membantu membimbing dalam penyusunan tugas akhir ini.
3. Bapak Ir. Tjendro, M.Kom. selaku Ketua Program Studi Teknik Elektro Universitas Sanata Dharma.
4. Ibu Theresia Prima Ari Setyani, M.T. selaku Dosen Pembimbing Akademik.
5. Seluruh dosen pengampu matakuliah Prodi Teknik Elektro, FST, dan USD.
6. Teman – teman semua yang telah membantu saya dalam penyusunan tugas akhir ini, Erika Nugrahingsih, Yohanes Aries H., Tongam Mangaradja Situmorang.
7. Seluruh pihak yang tidak dapat disebutkan satu persatu yang telah mendukung dan membantu.
Penulis memohon maaf apabila dalam penulisan tugas akhir ini terdapat kesalahan yang disengaja maupun yang tidak disengaja. Penulis berharap semoga tugas akhir ini bisa bermanfaat bagi para pembaca sekalian. Penulis juga mengucapkan terima kasih atas kritik dan saran yang membangun dari para pembaca sekalian.
Yogyakarta, 11 September 2021
Penulis
xi
DAFTAR ISI ... xi
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN ...1
1.1 Latar Belakang ... 1
1.2 Tujuan dan Manfaat ... 2
1.3 Batasan Masalah ... 2
1.4 Metodologi Penelitian ... 2
BAB II DASAR TEORI ...5
2.1 Konfigurasi Arena ... 5
2.2 Mikrokontroler ... 7
2.3 Sensor Jarak ... 8
2.4 Sensor Warna ... 9
2.5 Sensor Kompas ... 11
2.6 Servo Motor ... 12
2.7 Pompa Air DC ... 13
2.8 Fuzzy Mamdani [2][10] ... 14
BAB III RANCANGAN PENELITIAN ... 16
3.1 Blok Diagram Sistem ... 16
3.2 Perancangan Mekanik Robot ... 17
3.3 Perancangan Hardware ... 19
3.3.1 Power Supplay... 19
3.3.2 Mikrokontroler Master ... 20
3.3.3 Mikrokontroler Slave... 20
3.3.4 Komunikasi I2C ... 21
3.3.5 Waktu Pompa DC 12 Volt ... 22
3.4 Perancangan Diagram Alir ... 22
3.4.1 Diagram Alir Kerja Sistem ... 22
3.4.2 Diagram Alir Mikrokontroler Master ... 24
DAFTAR ISI
xii
3.4.3 Diagram Alir Mikrokontroler Slave ... 26
3.5 Perancangan Fuzzy Robot ... 28
3.5.1 Perancangan Masukan Fuzzy ... 29
3.5.2 Perancangan Keluaran Fuzzy ... 30
3.5.3 Perancangan Aturan Fuzzy ... 31
3.5.4 Hasil perancangan Keluaran Fuzzy ... 32
BAB IV HASIL DAN PEMBAHASAN ... 33
4.1 Perubahan Perancangan ... 33
4.1.1 Perubahan Batasan Masalah ... 33
4.1.2 Perubahan Konfigurasi Arena ... 33
4.1.3 Perubahan Mekanik Robot ... 34
4.1.4 Perubahan Perancangan Hardware Robot ... 34
4.2 Hasil Implementasi ... 35
4.3 Pengujian dan Pembahasan Hardware ... 39
4.3.1 Pengujian dan Pembahasan Sensor Jarak ... 40
4.3.2 Pengujian dan Pembahasan Sensor Warna... 45
4.3.3 Pengujian dan Pembahasan Sensor Kompas ... 49
4.3.4 Penyemprotan ... 52
4.4 Pengujian dan Pembahasan Fuzzy ... 53
4.5 Pembahasan Perangkat Lunak ... 54
4.5.1 Pembahasan Program Slave ... 54
4.5.2 Pembahasan Program Master ... 62
BAB V KESIMPULAN DAN SARAN ... 72
5.1 Kesimpulan ... 72
5.2 Saran ... 72
DAFTAR PUSTAKA ... 73 Lampiran ... ...L-1
xiii
Gambar 2.3 Urutan masuk ruangan sesi 1 ... 6
Gambar 2.4 Urutan masuk ruangan dan rintangan sesi 2 ... 6
Gambar 2.5 Mapping Atmega328 ... 7
Gambar 2.6 Arsitektur mikrokontroler ... 8
Gambar 2.7 Sensor PING Parallax ... 9
Gambar 2.8 Sensor TCS3200 ... 10
Gambar 2.9 Pin Sensor TCS3200 ... 10
Gambar 2.10 Sensor GY-26 ... 11
Gambar 2.11 Pin sensor GY-26 ... 12
Gambar 2.12 Servo motor SG90 Towerpro ... 13
Gambar 2.13 Pompa air DC ... 13
Gambar 3.1 Blok diagram sistem ... 16
Gambar 3.2 Tampak keseluruhan desain mekanik robot... 17
Gambar 3.3 Tampak atas desain mekanik robot ... 18
Gambar 3.4 Tampak depan desain mekanik robot ... 18
Gambar 3.5 Rancangan power supplay ... 19
Gambar 3.6 Rancangan rangkaian mikrokontroler master ... 20
Gambar 3.7 Rancangan rangkaian mikrokontroler slave ... 21
Gambar 3.8 Diagram alir penuh sistem ... 23
xiv
Gambar 3.9 Diagram alir utama mikrokontroler master ... 24
Gambar 3.10 Diagram alir subroutine deteksi garis ... 25
Gambar 3.11 Diagram alir subroutine kompas ... 26
Gambar 3.12 Diagram alir utama sesi 1 mikrokontroler slave ... 27
Gambar 3.13 Diagram alir utama sesi 2 mikrokontroler slave ... 28
Gambar 3.14 Rancangan masukan fuzzy ... 29
Gambar 3.15 Rancangan keluaran level pergerakan kanan robot ... 30
Gambar 3.16 Rancangan keluaran level pergerakan kiri robot ... 31
Gambar 4.1 Konfigurasi arena ... 34
Gambar 4.2 Perubahan mikrokontroler master ... 35
Gambar 4.3 Hasil implementasi mekanik robot (tampak depan) ... 35
Gambar 4.4 Hasil implementasi mekanik robot (tampak belakang) ... 36
Gambar 4.5 Bagian pertama robot ... 37
Gambar 4.6 Bagian kedua robot tampak depan ... 38
Gambar 4.7 Bagian kedua robot tampak samping kanan ... 38
Gambar 4.8 Bagian kedua robot tampak samping kiri ... 39
Gambar 4.9 Pengujian sensor jarak pada robot pada arah 0 derajat (utara) ... 40
Gambar 4.10 Kondisi khusus pada PING ke-0 ... 41
Gambar 4.11 Kondisi khusus pada PING ke-1 ... 42
Gambar 4.12 Serial monitor keluaran level pergerakan robot ... 42
Gambar 4.13 Posisi siap robot mendeteksi garis ... 46
Gambar 4.14 Serial monitor keluaran level pergerakan sensor warna ... 46
Gambar 4.15 Pengujian sensor garis pada robot ... 47
Gambar 4.16 Pengujian sensor kompas pada robot ... 50
xv
Gambar 4.22 Listing program void setup pada slave ... 57
Gambar 4.23 Listing program pada void loop (1) ... 58
Gambar 4.24 Listing program pada void loop (2) ... 58
Gambar 4.25 Grafik parameter nilai masukan fuzzy ... 59
Gambar 4.26 Grafik parameter nilai keluaran 1 fuzzy ... 60
Gambar 4.27 Grafik parameter nilai keluaran 2 fuzzy ... 60
Gambar 4.28 Listing program parameter masukan dan keluaran fuzzy ... 60
Gambar 4.29 Listing program Fuzzy Rules (1) ... 61
Gambar 4.30 Listing program Fuzzy Rules (2) ... 61
Gambar 4.31 Listing program master library dan inisialisasi (1) ... 62
Gambar 4.32 Listing program master library dan inisialisasi (2) ... 63
Gambar 4.33 Listing program master library dan inisialisasi (3) ... 63
Gambar 4.34 Listing program master library dan inisialisasi (4) ... 64
Gambar 4.35 Listing program master library dan inisialisasi (5) ... 64
Gambar 4.36 Listing program master library dan inisialisasi (6) ... 65
Gambar 4.37 Listing program jalan master (1) ... 66
Gambar 4.38 Listing program jalan master (2) ... 66
Gambar 4.39 Penomeran pin kaki servo ... 67
Gambar 4.40 Listing program komunikasi master-slave (1) ... 69
xvi
Gambar 4.41 Listing program komunikasi master-slave (2) ... 69
Gambar 4.42 Listing program switch pada robot ... 70
Gambar 4.43 Listing program pencarian ruangan ... 71
Gambar 4.44 Listing program penyemprotan pada master ... 71
Gambar 4.45 Listing program keluar ruangan pada master ... 72
xvii
Tabel 2.4 Konfigurasi pin sensor GY-26 ... 12
Tabel 2.5 Konfigurasi pengkabelan servo motor SG90 Towerpro ... 13
Tabel 3.1 Keterangan robot ... 18
Tabel 3.2 Pengalamatan I2C ... 21
Tabel 3.3 Hasil keluaran simulasi matlab ... 31
Tabel 4.1 Hasil pengujuan sensor Ultrasonik PING ... 43
Tabel 4.2 Level pergerakan kondisi khusus robot ... 43
Tabel 4.3 Hasil keluaran pergerakan robot berdasarkan jarak wall follower kiri ... 44
Tabel 4.4 Hasil keluaran pergerakan robot berdasarkan jarak wall follower kanan ... 44
Tabel 4.5 Karakteristik sensor warna TCS3200 ... 47
Tabel 4.6 Hasil pembacaan garis ... 48
Tabel 4.7 Batas nilai identifikasi arah kompas robot ... 50
Tabel 4.8 Pengujian sensor kompas GY-26 ... 50
Tabel 4.9 Data keberhasilan misi penyemprotan ... 52
Tabel 4.10 Pengujian level pergerakan fuzzy robot ... 53
Tabel 4.11 Kondisi khusus pada mikrokontroler slave ... 56
Tabel 4.12 Kondisi khusus pada mikrokontroler master ... 64
Tabel 4.13 Posisi siap robot ... 67
Tabel 4.14 Step gerakan robot ... 67
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Wabah Covid-19 melanda seluruh dunia tak terkecuali di Indonesia, mengubah cara hidup dan berkegiatan seluruh umat manusia. Perkembangan teknologi diuji pada masa pandemi ini, khususnya robotika dalam dunia kesehatan. Dalam perkembangannya robot di dunia kesehatan pada umumnya digunakan untuk pengobatan ataupun operasi saja. Dalam mengurangi penyebaran virus diperlukan adanya penyemprotan cairan disinfektan.
Penyemprotan disinfektan ini biasanya dilakukan secara manual. Hal ini dapat memicu terjadinya penyebaran karena dilakukan secara manual. Resiko tertular menjadi lebih besar karena terjadi kontak langsung. Oleh karena itu, Robotika diharapkan dapat berperan untuk mengurangi ataupun menghilangkan penyebaran virus pada masa pandemi.
Kontes Robot Indonesia (KRI) merupakan ajang kompetisi rancang bangun dan rekayasa dalam bidang robotika [1]. KRI sendiri diselenggarakan oleh Pusat Prestasi Nasional, Kementrian Pendidikan dan Kebudayaan Republik Indonesia. Kontes Robot ini dapat diikuti oleh tim mahasiswa pada Perguruan Tinggi yang tercatat di Kementrian Pendidikan dan Kebudayaan Republik Indonesia dan Pangkalan Data Pendidikan Tinggi [1].
Kontes Robot Pemadam Api Indonesia (KRPAI) merupakan salah satu divisi yang diperlombakan dalam Kontes Robot Indonesia. Kontes Robot Pemadam Api Indonesia terdapat 2 divisi lagi yaitu beroda dan berkaki. Tetapi KRI tahun 2020 divisi beroda ditiadakan. KRPAI pada tahun 2020 mengalami perubahan dari tahun sebelumnya, mulai dari pertandingan yang diganti secara daring, sampai dengan peraturan pertandingan yang diganti. hal ini disebabkan karena terjadinya wabah COVID-19. Tema dan aturan KRPAI yang lama sangat memungkinkan diarahkan ke penanggulangan wabah Covid-19 dikarenakan situasi dan parameter-parameter yang diolah dalam KRPAI sama dengan beberapa tugas dalam penanggulangan wabah Covid-19. Tugas-tugas tersebut diantaranya adalah penyemprotan disinfektan.
Peneliti Erika Nugrahingsih membahas tentang metode pencarian api [2]. Penelitian tersebut hanya berkonsentrasi untuk mencari letak titik api dan memadamkannya dengan menggunakan penyemprotan terarah. Penyemprotan terarah digunakan untuk memadamkan
setiap ruangan. Dalam tugas akhir ini, akan dilakukan analisis respon robot terhadap penerimaan parameter – parameter sensor.
1.2 Tujuan dan Manfaat
Tujuan dari penelitian ini adalah untuk menghasilkan robot penyemprot disinfektan yang dapat menyusuri lorong, memasuki ruangan sesuai dengan urutan, dan menyemprotkan cairan di setiap ruangan.
Manfaat dari penelitian ini adalah mengedukasi masyarakat untuk pengembangan robot penyemprot disinfektan dan pengembangan klub robotika divisi Kontes Robot Pemadam Api Indonesia (KRPAI) Universitas Sanata Dharma.
1.3 Batasan Masalah
Penelitian hanya mengambil batasan masalah tentang pengaturan sensor dari posisi awal hingga memasuki setiap urutan ruangan dan menyemprotkan cairan di setiap ruangannya. Batasan Masalah pada penulisan tugas akhir ini adalah :
1. Robot mampu menyusuri ruangan.
2. Robot mampu memasuki ruangan yang sudah ditentukan.
3. Menggunakan konfigurasi ruangan sesuai dengan Kontes Robot Indonesia (KRI).
4. Robot mampu menyemprotkan cairan disinfektan secara menyebar dalam ruangan.
5. Menggunakan mikrokontroler Arduino Nanno.
6. Menggunakan sensor jarak ultrasonic Parallax sebagai pembaca jarak.
7. Menggunakan sensor kompas GY-26 sebagai penentu arah.
8. Menggunakan sensor warna TCS3200 sebagai pendeteksi ruangan.
1.4 Metodologi Penelitian
Berdasarkan batasan masalah dan tujuan yang ingin dicapai, langkah – langkah yang digunakan untuk menyusun tugas akhir ini adalah :
1. Studi pustaka
Studi pustaka dilakukan untuk menambah wawasan dan pengetahuan yang mendalam dalam perancangan dan pembuatan alat, dalam hal penelitian ini adalah robot pemadam api. Studi pustaka yang digunakan adalah dengan menggunakan referensi beberapa buku – buku, jurnal – jurnal, informasi yang ada di internet, dan lain – lain yang berkaitan dengan perancangan dan pembuatan tugas akhir. Teori yang akan digunakan mengacu tentang mikrokontroler, sensor kompas, sensor jarak, sensor warna, dan pompa penyemprot.
2. Perancangan alat
Gambar 1.1 Diagram blok perancangan alat
Gambar 1.1 merupakan gambaran penuh tentang sistem yang akan dibuat. Bagian yang akan dikerjakan oleh penulis adalah bagian pengolahan sensor yaitu bagian yang diberi tanda kotak. Bagian yang lain dikerjakan oleh penulis lain. Mulai dari menerima masukan dari sensor – sensor yaitu : sensor jarak, sensor warna, dan sensor kompas. Data hasil pembacaan sensor – sensor kemudian dibaca menggunakan mikrokontroler slave. Setelah dibaca menggunakan mikrokontroler slave, data dikirimkan ke mikrokontroler master sensor.
3. Pembuatan alat
Pada tahap ini pembuatan alat berupa perangkat keras (hardware) dan perangkat lunak (software) berupa robot pemadam api.
hasil percobaan dengan hasil perancangan dan kesimpulan dari hasil percobaan yang didapat.
BAB II
DASAR TEORI
Pada bab ini berisikan penjelasan tentang komponen – komponen yang akan digunakan dalam pembuatan penelitian “Robot Berkaki Penyemprot Disinfektan Berbasis Mikrokontroler”. Komponen-komponen yang digunakan antara lain: mikrokontroler Arduino, sensor kompas, sensor warna, sensor jarak.
2.1 Konfigurasi Arena [1]
Gambar 2.1 Konfigurasi arena sesi 1 [11]
Kontes Robot Pemadam Api Indonesia (KRPAI) memiliki parameter konfigurasi arena yang tetap pada tahun ini. Hal ini dikarenakan perlombaan dilaksanakan secara online, sehingga untuk memudahkan peserta dan panitia konfigurasi arena dibuat sama. Tahun sebelumnya konfigurasi arena diundi dan memiliki berbagai macam variasi konfigurasi.
Terdapat 3 sesi dalam perlombaannya. Dan terdapat 3 konfigurasi arena. Sesi 1 dan sesi 2 digunakan untuk menyemprotkan cairan disinfektan. Sedangkan sesi 3 digunakan untuk pemadaman api. Tugas akhir ini menggunakan 2 konfigurasi arena yaitu sesi 1 dan sesi 2.
Gambar 2.1 adalah gambaran konfigurasi arena pada sesi 1 dan Gambar 2.2 adalah gambaran konfigurasi arena pada sesi 2. Perbedaan aturan pada tahun ini terletak pada urutan masuk ruangan dan juga rintangan yang digunakan. Gambar 2.3 adalah gambaran urutan masuk ruangan untuk sesi 1. Sedangkan, Gambar 2.4 adalah gambaran urutan masuk ruangan dan terdapat rintangan untuk sesi 2.
5
Gambar 2.2 Konfigurasi arena sesi 2 [11]
Gambar 2.3 Urutan masuk ruangan sesi 1 [11]
Gambar 2.4 Urutan masuk ruangan dan rintangan sesi 2 [11]
2.2 Mikrokontroler
Gambar 2.5 Mapping Atmega328 [4]
Mikrokontroler adalah suatu komponen elektronik yang bertugas untuk mengontrol plant. Mikrokontroler memiliki perbedaan dengan mikrokomputer. Perbedaan terletak pada memori penyimpanan yang digunakan yaitu RAM dan ROM. Selain itu, keduanya sama – sama memiliki mikroprosesor untuk pemrosesan data. RAM digunakan untuk menyimpan data sementara, sedangkan ROM digunakan untuk menyimpan program yang hanya bisa dibaca tidak bisa ditulis. Arsitektur mikrokontroler terdiri dari ALU (Aritmatic Logical Unit), Register, Timer, Interupt, Program Counter dan lainnya. Gambar 2.5 adalah gambaran mapping Atmega. Gambar 2.6 adalah gambaran arsitektur pada mikrokontroler.
Mikrokontroler juga dilengkapi piranti pendukung seperti ROM (Read Only Memory), RAM (Random Access Memory), input/output (I/O), communication interface.
Arduino Nano menggunakan mikroprosesor dengan keluarga Atmega32. Memiliki 14 pin input/output, 8 masukan analog, osilator kristal 16 MHz, koneksi USB, tombol reset, ISCP header. Sumber tegangan bisa berasal dari computer dengan menggunakan koneksi kabel USB, melalui adaptor AC ke DC, atau menggunakan batrai. Pin Arduino Nano dapat dilihat pada Tabel 2.1.
Gambar 2.6 Arsitektur mikrokontroler[3]
Tabel 2.1 Pin Arduino Nano[4]
2.3 Sensor Jarak [5]
Pengukuran sensor jarak pada sistem ini menggunakan sensor PING. Sensor ini sangat efektif dan cocok yang mengharuskan untuk melakukan pengukuran antara objek
bergerak atau tidak bergerak. Sensor PING menggunakan sinyal dengan kekuatan sebesar 40 KHz. Gambar 2.7 adalah gambar sensor PING Parallax.
Gambar 2.7 Sensor PING Parallax [5]
Perangkat satu ini sangat mudah dikoneksikan ke mikrokontroler. Hal ini dikarenakan sensor ini hanya memiliki 3 pin saja, yaitu sensor, tegangan, dan ground. Pin input/output (I/O) memicu untuk memancarkan gelombang ultrasonic dari sisi pemancar (Transmitter). Sensor mengukur waktu yang diperlukan gema untuk kembali dan diterima oleh sisi penerima (Receiver). Dengan kata lain sensor ini menggunakan perhitungan dengan mengukur panjang pancaran sinyal ultrasonik yang dipancarkan dengan menggunakan aspek waktu. Berikut adalah spesifikasi sensor PING Parallax :
1. Dapat digunakan dengan sudut penerimaan yang sempit.
2. Perkiraan pengukuran jarak dari 3 cm sampai 3 m.
3. 3-pin male header dengan jarak 0.1”.
4. Daya yang digunakan 5 Volt dengan arus 35mA.
5. Komunikasi menggunakan pulsa TTL positif.
6. Dimensi 22 mm x 46 mm x 16 mm.
7. Ketahanan suhu beroperasi pada 0 ºC – 70 ºC.
2.4 Sensor Warna [6]
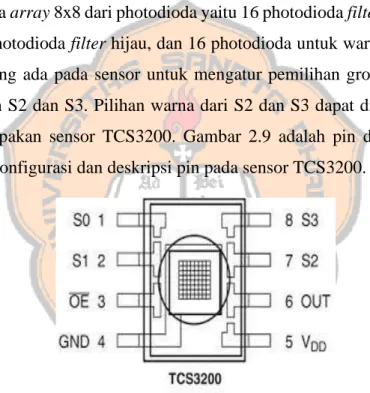
Sensor warna yang digunakan pada sistem adala TCS3200. Sensor warna TCS3200 adalah sebuah converter yang didesain untuk mengubah warna menjadi frekuensi. Keluaran sensor adalah gelombang kotak dengan duty cycle 50%. Masukan digital dan keluaran digital memungkinkan interface ke mikrokontroler langsung.
Gambar 2.8 Sensor TCS3200 [6]
TCS3200 terdiri dari 4 photodioda untuk filter warna. Dalam TCS3200 konverter cahaya ke frekuensi membaca array 8x8 dari photodioda yaitu 16 photodioda filter biru, 16 photodioda filter merah, 16 photodioda filter hijau, dan 16 photodioda untuk warna terang tanpa filter.
Terdapat 2 pin yang ada pada sensor untuk mengatur pemilihan group dari 4 photodioda teersebut yaitu pin S2 dan S3. Pilihan warna dari S2 dan S3 dapat dilihat pada Tabel 2.3.
Gambar 2.8 merupakan sensor TCS3200. Gambar 2.9 adalah pin dari sensor TCS3200.
Tabel 2.2 adalah konfigurasi dan deskripsi pin pada sensor TCS3200.
Gambar 2.9 Pin Sensor TCS3200 [6]
Tabel 2.2 Konfigurasi pin TCS3200
Nama No kaki I/O Deskripsi
GND 4 Ground power supply
OE 3 I Aktif pada fo (aktif rendah)
OUT 6 O Frekuensi keluaran
S0, S1 1, 2 I Penskalaan pemilih pada
frekuensi keluaran S2, S3 7, 8 I masukan pilihan photodioda
VDD 5 Supply tegangan
Tabel 2.3 Pilihan warna pada photodioda
S2 S3 Warna Photodioda
L L Merah
L H Biru
H L Cerah tanpa filter
H H Hijau
2.5 Sensor Kompas [7]
Sensor kompas yang digunakan pada sistem adalah GY-26. Sensor kompas dengan modul kompas digital datar. Tegangan dan daya yang digunakan kecil. Ukuran sensor kompas pun relatif kecil. Prinsip kerjanya adalah dengan menggunakan respon 2 sensor magnet yang saling lurus komponen magnet induksi. Modul kompas ini juga menyediakan kalibrasi. Sehingga memudahkan untuk memakai dimana saja. Hal ini dikarenakan medan magnet di setiap tempat berbeda – beda. Berikut adalah spesifikasi sensor GY-26 :
1. ±5 derajat untuk akurasi.
2. Kalibrasi besi keras tingkat lanjut.
3. Beroperasi pada tegangan yang rendah (3 – 5 Volt).
4. Operasi catu daya tunggal DC.
5. Operasi dengan kestabilan dan akurasi tinggi.
Gambar 2.10 Sensor GY-26 [7]
Gambar 2.10 merupakan tampak sensor GY-26. Gambar 2.11 adalah pin pada sensor GY-26. Tabel 2.4 adalah deskripsi pin pada sensor GY-26.
Gambar 2.11 Pin sensor GY-26 [7]
Tabel 2.4 Konfigurasi pin sensor GY-26
No Pin Nama Pin Deskripsi
1 VCC Input catu daya
2 TXD Mengirim data output
3 RXD Menerima data input
4 SCL I2C SCL
5 SDA I2C SDA
6 GND Ground
7 GND Ground
8 GND Ground
9 CAL Kalibrasi
10 NC Tidak ada sambungan
11 NC Tidak ada samBungan
12 GND Input catu daya
2.6 Servo Motor [8]
Sistem penyemprotan bagian ujung nozle menggunakan penggerak yaitu servo motor SG90 Towerpro. Servo ini dapat berputar 180 derajat, masing – masing bergerak 90 derajat ke arah kiri dan kanan. Servo ini pada umumnya digunakan untuk aktuator sebuah robot, selain itu juga digunakan untuk kontrol posisi robot tanpa melakukan umpan balik (feedback). Gambar 2.12 adalah bentuk servo motor SG90 Towerpro. Tabel 2.5 adalah konfigurasi pengkabelan pada servo SG90 Towerpro. Berikut adalah spesifikasi servo motor SG90 Towerpro :
1. Tipikal tegangan operasi +5 Volt.
2. Torsi : 2,5 Kg/cm.
3. Kecepatan operasi : 0,1 detik/60º.
4. Tipe gear menggunakan plastic.
5. Rotasi : 0º - 180º.
6. Berat motor : 9 gram.
Gambar 2.12 Servo motor SG90 Towerpro [8]
Tabel 2.5 Konfigurasi pengkabelan servo motor SG90 Towerpro
Warna kabel Deskripsi
Coklat Kabel koneksi ke ground
Merah Kabel koneksi ke tegangan +5 Volt kuning Sinyal PWM untuk menggerakan motor
2.7 Pompa Air DC [9]
Gambar 2.13 Pompa air DC [9]
Pada sistem penyemprotan digunakan alat yang dapat mengalirkan fluida dari suatu tempat ke tempat lainnya yaitu pompa. Pompa menggunakan tenaga listrik untuk menaikkan tekanan fluida untuk mengatasi hambatan pengaliran, hambaran pengaliran bisa disebabkan oleh adanya perbedaan tekanan, perbedaan ketinggian atau hambatan gesek. Pada prinsipnya
Sistem inferensi fuzzy metode mamdani juga dikenal dengan nama metode max-min.Metode Mamdani bekerja berdasarkan aturan-aturan linguistik. Metode ini diperkenalkan oleh Ebrahim H. Mamdani pada tahun 1975. Berikut adalah tahapan dalam menentukan output:
1. Pembentukan himpunan fuzzy
Menentukan semua variabel yang terkait dalam proses yang akan ditentukan.Pada metode Mamdani, baik variable input maupun variabel output dibagi menjadi satu atau lebih himpunan fuzzy.
2. Aplikasi fungsi implikasi
Aturan-aturan implikasi menyatakan relasi antara variabel input dengan output. Pada metode Mamdani fungsi implikasi digunakan adalah minimum.
3. Komposisi aturan
Ada 3 metode komposisi yang digunakan dalam melakukan inferensi sistem fuzzy yaitu max, add, dan probabilistik OD (probor).
a. Metode Max (Maximum)
Pada metode ini, solusi himpunan fuzzy diperoleh dengan cara mengambil nilai maksimum, kemudian menggunakan nilai tersebut untuk modifikasi daerah fuzzy dan mengaplikasikannya ke nilai output dengan menggunakan operasi OR (gabungan). Secara umum dapat dituliskan sebagaiberikut :
μ(𝑥𝑖) = max (μ𝑠𝑓(𝑥𝑖), μ𝑘𝑓(𝑥𝑖)) (2.1)
dengan :
μsf (xi) = nilai keanggotaan solusi fuzzy sampai aturan ke-i μkf (xi) = nilai keanggotaan konsekuen fuzzy sampai ke-i
b. Metode addative (Sum)
Metode solusi himpunan fuzzy ini diperoleh dengan cara melakukan penjumlahan terhadap semua output daerah fuzzy.
c. Metode Probabilistik OD (probor)
Metode solusi himpunan fuzzy ini diperoleh dengan cara melakukan perkalian terhadap semua output daerah fuzzy.
4. Defuzzifikasi
Input dari suatu proses defuzzifikasi adalah suatu himpunan fuzzy yang diperoleh dari komposisi aturan-aturan fuzzy, sedangkan output yang dihasilkan merupakan suatu bilangan pada domain himpunan fuzzy tersebut. Sehingga jika diberikan suatu himpunan fuzzy dengan range tertentu, maka harus dapat diambil suatu nilai crisp tertentu sebagai output. Ada beberapa metide defuzzifikasi yang bisadigunakan pada komposisi aturan Mamdani, yaitu centroid, bisektor, mean of maximum. Dalam penelitian ini metode yang digunakan adalah centroid. Pada metode ini solusi tegas diperoleh dengan mengambil titik pusat daerah fuzzy.
Secaraumum dituliskan sebagai berikut:
Untuk domain diskret, dengan di adalah nilai keluaran pada aturan ke-I dan 𝜇𝐴̃𝑖
(𝑑𝑖) adalah derajat keanggotaan nilai keluaran pada aturan ke-I, sedangkan n adalah banyaknya aturan yang digunakan. Berikut untuk domain kontinyu :
∫ 𝑧. 𝜇𝑏 𝑧(𝑑𝑧) 𝑍0 = 𝑎 𝑏
∫𝑎 𝜇𝑧(𝑑𝑧)
(2.3)
Dengan Z0 adalah nilai hasil defuzzifikasi dan 𝜇𝑧 adalah derajat keanggotaan titik,dan Z adalah domain nilai ke-i.
∑𝑛 1 𝑑𝑖𝜇𝐴̃ (𝑑𝑖) 𝑍 = 𝑖= ∑𝑛𝑖=1 𝜇𝐴̃ (𝑑𝑖 𝑖)
𝑖
(2.2)
perancangan perangkat lunak (Software). Dalam bab ini membahas proses perancangan robot agar dapat menyemprotkan cairan disinfektan di setiap ruangan. Robot berjalan menyusuri ruangan, kemudian dapat memasuki ruangan sesuai dengan urutan masuk ruangan. Robot memasuki ruangan dengan cara melewati garis ruangan. Indikasi yang digunakan dapat membaca warna garis ruangan dengan menggunakan sensor warna. Setelah memasuki ruangan robot ditugaskan untuk memutar badan 90º ke arah kiri dan dilanjutkan 180º ke arah kanan.
3.1 Blok Diagram Sistem
Perancangan robot menggunakan 2 mikrokontroler yaitu 1 mikrokontroler slave dan 1 mikrokontroler master sesuai dengan blok diagram sistem pada Gambar 3.1. Penggunaan mikrokontroler banyak digunakan untuk menunjang kerja sistem.
Gambar 3.1 Blok diagram sistem 16
Gambar 3.2 Tampak keseluruhan desain mekanik robot
Banyaknya indikator sensor yang harus dikerjakan tidak memungkinkan untuk menggunakan 1 mikrokontroler saja dibutuhkan mikrokontroler lain untuk dapat mengerjakan bagian – bagian yang tidak dapat dikerjakan oleh 1 mikrokontroler. Kemudian untuk menggabungkan menjadi kesatuan sistem mikrokontroler dikomunikasikan satu sama lain. Sehingga, kerja tiap bagian sistem dapat berjalan dengan baik dan tidak mengganggu bagian sistem lainnya menghasilkan error.
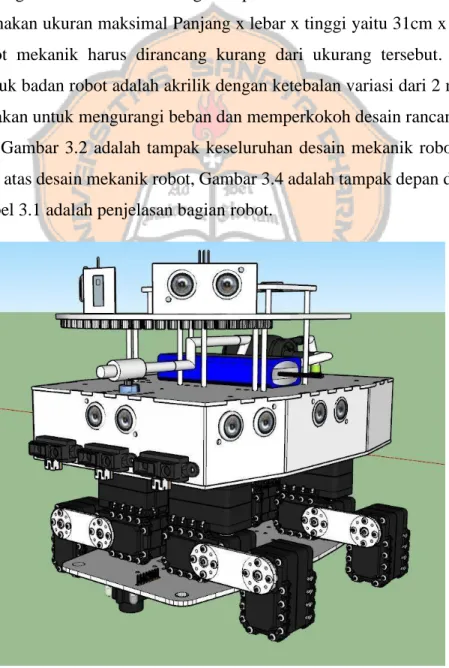
3.2 Perancangan Mekanik Robot
Perancangan mekanik robot mengikuti peraturan KRPAI 2020. Peraturan KRPAI 2020 menggunakan ukuran maksimal Panjang x lebar x tinggi yaitu 31cm x 31cm x 27cm, sehingga robot mekanik harus dirancang kurang dari ukurang tersebut. material yang digunakan untuk badan robot adalah akrilik dengan ketebalan variasi dari 2 mm dan 5 mm.
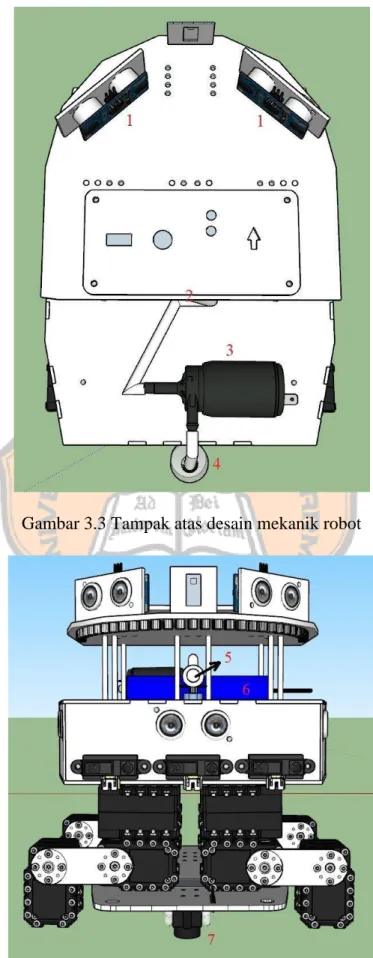
Ukuran dibedakan untuk mengurangi beban dan memperkokoh desain rancangan agar tidak mudah patah. Gambar 3.2 adalah tampak keseluruhan desain mekanik robot, Gambar 3.3 adalah tampak atas desain mekanik robot, Gambar 3.4 adalah tampak depan desain mekanik robot, dan Tabel 3.1 adalah penjelasan bagian robot.
Gambar 3.4 Tampak depan desain mekanik robot Gambar 3.3 Tampak atas desain mekanik robot
Tabel 3.1 Keterangan robot
No. Keterangan
1 Sensor jarak
2 Panel robot (indikator robot, switch robot, switch program)
3 Pompa air
4 Bak air
5 Nozzle pompa
6 Batrai 12 Volt
7 Sensor warna
3.3 Perancangan Hardware
3.3.1 Power Supplay
Gambar 3.5 Rancangan power supplay
Tegangan robot berasal dari sebuah batrai 12 volt DC, kemudian tegangan 12 volt diturunkan menjadi 5 volt dengan menggunakan Step down DC to DC (Buck Cinverter) untuk kebutuhan tengan mikrokontroler dan sensor. Sedangkan, untuk sensor yang menggunakan tegangan 3,3 volt menggunakan pin yang ada pada mikrokontroler. Gambar 3.5 adalah rancangan suplai tegangan yang digunakan pada penelelitian ini.
menggunakan servo SG90 Towerpro. Gambar 3.6 adalah rancangan rangkaian mikrokontroler master.
Gambar 3.6 Rancangan rangkaian mikrokontroler master
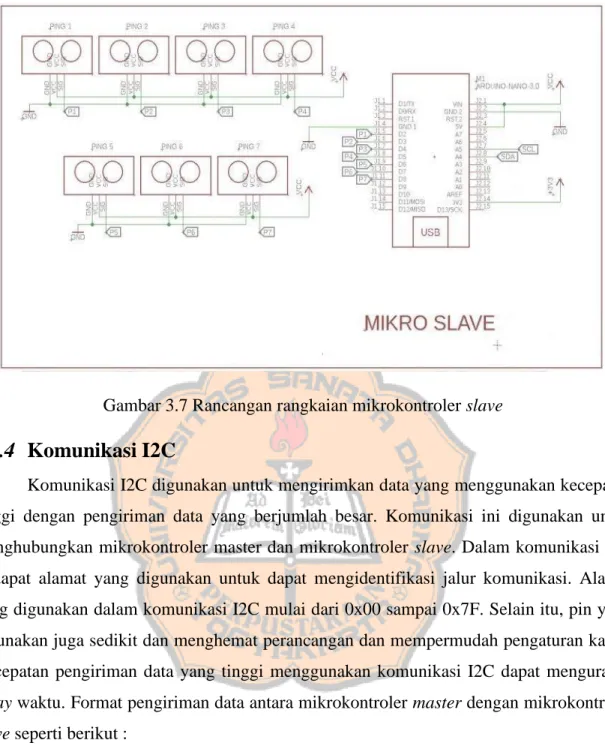
3.3.3 Mikrokontroler Slave
Mikrokontroler slave digunakan untuk mengontrol sensor ultrasonic Parallax (PING).
PING yang digunakan berjumlah 7 buah yang dihubungkan ke pin input digital mikrokontroler slave. Gambar 3.7 merupakan rancangan rangkaian mikrokontroler slave.
Gambar 3.7 Rancangan rangkaian mikrokontroler slave
3.3.4 Komunikasi I2C
Komunikasi I2C digunakan untuk mengirimkan data yang menggunakan kecepatan tinggi dengan pengiriman data yang berjumlah besar. Komunikasi ini digunakan untuk menghubungkan mikrokontroler master dan mikrokontroler slave. Dalam komunikasi I2C terdapat alamat yang digunakan untuk dapat mengidentifikasi jalur komunikasi. Alamat yang digunakan dalam komunikasi I2C mulai dari 0x00 sampai 0x7F. Selain itu, pin yang digunakan juga sedikit dan menghemat perancangan dan mempermudah pengaturan kabel.
Kecepatan pengiriman data yang tinggi menggunakan komunikasi I2C dapat mengurangi delay waktu. Format pengiriman data antara mikrokontroler master dengan mikrokontroler slave seperti berikut :
#𝑥, 𝑦
Keterangan :
x adalah gerakan kaki bagian kanan robot dengan range 1-100 y adalah gerakan kaki bagian kiri robot dengan range 1-100
Semakin kecil nilai data yang dikirimkan akan semakin lambat robot berjalan, sedangkan semakin besar nilai data yang dikirimkan semakin cepat pergerakan robot yang dihasilkan. Mikrokontroler slave mengirimkan data ke mikrokontroler master sensor,
𝑠
3.3.5 Waktu Pompa DC 12 Volt
Alat yang digunakan untuk menyemprotkan cairan adalah pompa air DC 12 volt.
Pompa air dengan aliran air sebesar 30 ml/s. Tabung yang digunakan memiliki kapasitas volume 50 ml. Perkiraan perhitungan banyaknya volume air dannwaktu yang diperlukan untuk menyemprot dalam 1 ruangan adalah sebagai berikut :
Volume : 50 ml
Debit : 30 ml/s
Jumlah ruangan 4
𝑉𝑜𝑙𝑢𝑚𝑒 𝑝𝑒𝑟 𝑟𝑢𝑎𝑛𝑔𝑎𝑛 = 50 𝑚 4
= 12,5 𝑚𝑙
12,5 𝑚𝑙 𝑊𝑎𝑘𝑡𝑢 =
30 𝑚𝑙⁄ = 0,4167𝑠 ≈ 400 𝑚𝑠
Sehingga waktu yang diperlukan maksimal untuk menyemprotkan cairan di setiap ruangan adalah 0,4167 detik dengan volume air per ruangan ±12,5 ml. Dengan melakukan pendekatan menggunakan satuan mikro detik dalam program arduino, maka waktu penyemprotan dalam satu ruangan adalah 400 mikro detik.
3.4 Perancangan Diagram Alir
3.4.1 Diagram Alir Kerja Sistem
Robot penyemprot disinfektan berkaki akan dimulai dengan menyalakan switch pada robot. Robot akan berjalan dari home menyusuri lorong dengan memanfaatkan sensor jarak untuk mendapatkan level pergerakan. Robot mendeteksi garis pintu pertama dengan menggunakan sensor warna yang menandakan bahwa robot sudah dapat menyusuri lorong.
Selanjutnya robot dapat memasuki ruangan dengan catatan seluruh bagian dari robot
melewati garis pintu ruangan. Setelah memasuki ruangan, robot dapat melakukan penyemprotan disinfektan. Penyemprotan dilakukan secara menyebar, robot dapat menyemprot memutar dari posisi awal memutar 90 derajat ke arah kanan dan 180 derajat ke arah kiri dan dilanjutkan 90 derajat ke arah kanan.
Gambar 3.8 Diagram alir penuh sistem
Dengan rincian tersebut robot dapat dikatakan berhasil melakukan tugas penyemprotan disinfektan. Setelah berhasil melakukan tugas penyemprotan robot akan
Gambar 3.9 Diagram alir utama mikrokontroler master
Program yang ada pada mikrokontroler master adalah program untuk kompas dan deteksi warna. Sensor warna mendeteksi melalui pengubahan warna merah dengan mengatur pin output sensor menjadi merah pada S1 dan S2 menjadi low. Sensor warna mengambil data nilai komponen merah lebih dari 450 mendeteksi warna putih sebagai garis. Ketika
sensor mendeteksi adanya garis maka data akan dikirimkan ke mikrokontroler master.
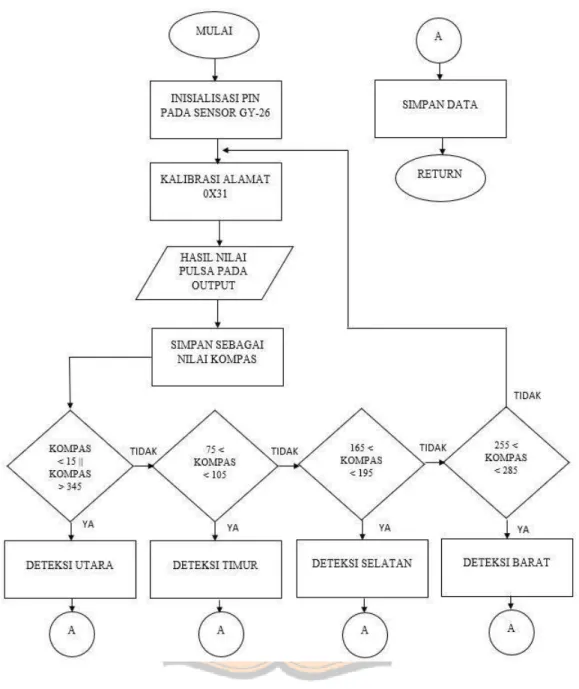
Sensor kompas mengambil data nilai sesuai dengan arah kompas, nilai yang dihasilkan oleh setiap mata angin berbeda – beda. Setelah mendapatkan arah kompas data dikirimkan ke mikrokontroler master. Urutan program yang ada pada mikrokontroler master adalah pertama memeriksa keadaan saklar on, setelah saklar on mikrokontroler master meminta data dari mikrokontroler slave, kemudian memanggil subroutine untuk mendeteksi garis dan subroutine deteksi kompas. Gambar 3.9 menunjukkan diagram alir utama dari mikrokontroler master, Gambar 3.10 menunjukkan diagram alir subroutine deteksi garis, Gambar 3.11 menunjukkan diagram alir subroutine kompas.
Gambar 3.10 Diagram alir subroutine deteksi garis
Gambar 3.11 Diagram alir subroutine kompas
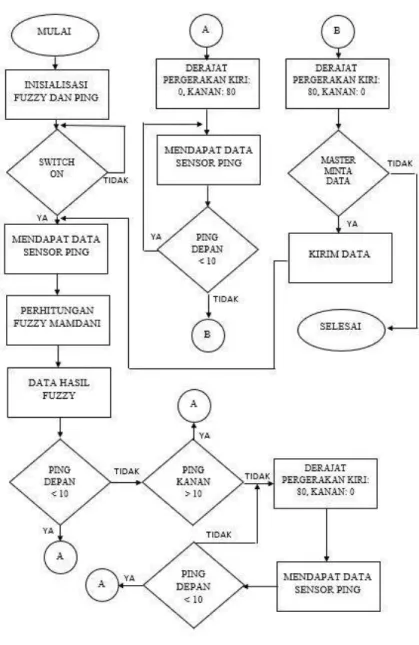
3.4.3 Diagram Alir Mikrokontroler Slave
Program yang ada pada mikrokontroler slave adalah program untuk memperoleh level pergerakan dengan mengatur sensor jarak. Pada dasarnya pergerakan robot menggunakan wall follower. Hal pertama yang dilakukan adalah inisialisasi fuzzy dan sensor PING. Saat saklar dinyalakan selanjutnya mikrokontroler slave akan mendata sensor dan selanjutnya mengidentifikasi data – data. Pembandingan data dilakukan untuk mengetahui pergerakan robot. Terdapat dua program pada mikrokontroler slave, proram dibuat sesuai dengan aturan pada sesi 1 dan sesi 2. Perbedaan program sesuai dengan urutan masuk ruangan. Sesi pertama menggunakan wall follower kanan, sedangkan sesi kedua
menggunakan wall follower kiri. Untuk program pada sesi pertama apabila sensor PING depan tidak menemukan dinding dan PING kanan menemukan dinding maka robot akan bergerak maju mengikuti dinding bagian kanan. Ketika dalam perjalanan robot menemukan dinding pada sensor PING depan, maka robot akan bergerak belok kiri. Untuk program pada sesi kedua apabila sensor PING depan tidak menemukan dinding dan PING kiri menemukan dinding maka robot akan bergerak maju mengukuti dinding bagian kiri. Ketika dalam perjalanan robot menemukan dinding pada sensor depan, maka robot akan bergerak belok kanan. Gambar 3.12 merupakan diagram alir utama sesi 1 mikrokontroler slave dan Gambar 3.13 merupakan diagtam alir utama sesi 2 mikrokontroler slave.
Gambar 3.12 Diagram alir utama sesi 1 mikrokontroler slave
Gambar 3.13 Diagram alir utama sesi 2 mikrokontroler slave
3.5 Perancangan Fuzzy Robot
Dalam penelitian ini fuzzy digunakan untuk menentukan level pergerakan robot.
Fuzzy berfungsi untuk menjalankan robot menyusuri dinding, sehingga robot dapat menentukan bergerak sesuai dengan dinding yang dipilihnya. Proses umum dari fuzzy dalam penelitian ini yaitu dengan menerima masukan dari sensor jarak dan kemudian diproses sedemikian sehingga dapat dihasilkan level pergerakan kaki untuk proses jalan robot.
Dalam hal ini fuzzy berperan penting dalam pergerakan robot, dalam perancangan pemrosesan fuzzy dilakukan oleh mikorkontroler tersendiri, hal ini dikarenakan dalam memproses fuzzy dibutuhkan perhitungan yang panjang dan kompleks, jadi digunakan mikorkontroler tersendiri untuk dapat memproses fuzzy ini.
Perancangan fuzzy menggunakan simulasi matlab untuk dapat menentukan keluaran level pergerakan robot. Dalam perancangan fuzzy menggunakan 1 masukan dari sensor jarak dan menghasilkan 2 keluaran pergerakan robot. keluaran pergerakan robot digunakan untuk menggerakkan robot bagian kanan dan kiri. Dalam perancangan robot apabila nilai level pergerakan kiri lebih besar dari level kanan, maka robot akan bergerak ke arah kanan, sebaliknya apabila level pergerakan kanan lebih besar dari kiri, maka robot akan bergerak ke arah kiri. Hal ini yang membuat robot dapat bergerak menyesuaikan diri untuk dapat menyusuri ruang berdasarkan sensor jarak.
3.5.1 Perancangan Masukan Fuzzy
Dalam perancangan masukan fuzzy ditentukan dengan pembacaan sensor jarak, selain itu juga dimensi robot berpengaruh pada perancangan masukan fuzzy. Semakin lebar dimensi robot maka akan semakin stabil untuk dapat berjalan lurus. Semakin lebar dimensi robot juga pembacaan sensor jarak akan semakin terbatas, mengingat lebar lorong yang digunakan hanya 45 cm, sedangkan lebar robot sudah 32 cm. Masukan fuzzy robot hanya bisa untuk jarak 10 cm sampai 16 cm. Nilai tengah – tengah masukan yang diinginkan dari 10 cm sampai 16 cm adalah 13 cm. Pada saat sensor mendeteksi jarak sebesar 13 cm, maka itu adalah jarak optimal yang dirancang untuk robot dapat berjalan lurus sesuai dengan lorong. Dengan kata lain, selain jarak 13 cm maka robot akan beradaptasi dengan memvariasikan level pergerakan kanan robot dan level kiri robot. Gambar 3.14 merupakan derajat keanggotaan rancangan masukan fuzzy
Gambar 3.14 Rancangan masukan fuzzy
pergerakan kaki robot yang akan menentukan pergerakan robot. Level pergerakan pada perancangan keluaran fuzzy akan dibagi menjadi dua yaitu kanan dan kiri. Pergerakan kaki kanan dan kiri akan diatur oleh keluaran fuzzy. Dalam perancangan robot akan berjalan lurus apabila keluaran level pergerakan kaki kanan dan kiri bernilai 20 dengan keadaan sensor jarak membaca jarak sejauh 13 cm. Dengan kata lain, robot akan menyesuaikan pergerakan selain dari pembacaan sensor jarak 13 cm.
Kedua level pergerakan robot diatur sesuai dengan level pergerakan servo kaki.
Dalam penelitian ini level pergerakan servo kaki diatur berkisar antara nilai 2 sampai 30.
Semakin besar nilai level pergerakan kaki robot akan bergerak semakin lebar, sebaliknya semakin kecil nilai level pergerakan kaki robot akan bergerak semakin sempit. Gambar 3.15 dan gambar 3.16 merupakan level keanggotaan pergerakan robot kanan dan kiri.
Gambar 3.15 Rancangan keluaran level pergerakan kanan robot
Gambar 3.16 Rancangan keluaran level pergerakan kiri robot Keterangan :
Slow mendefinisikan level pergerakan robot yang lambat.
Medium mendefinisikan level pergerakan robot yang standar.
Fast mendefinisikan level pergerakan robot yang cepat.
3.5.3 Perancangan Aturan Fuzzy
Terdapat 3 aturan dalam perancangan menggunakan fuzzy dengan metode mamdani ini. Aturan yang digunakan adalah dengan proposisi jika dan maka. Dalam perancangan menggunakan 1 masukan dan 2 keluaran, maka aturan yang digunakan adalah dengan menetapkan masukan menggunakan proposisi tunggal dan keluaran dengan proposisi majemuk. Dalam 3 aturan itu mengatur nilai masukan menjadi 2 nilai keluaran yang diinginkan. Berikut adalah 3 aturan fuzzy yang digunakan dalam perancangan :
1. Jika masukan adalah near maka level pergerakan kanan slow dan level pergerakan kiri fast.
2. Jika masukan adalah desired maka level pergerakan kanan medium dan level pergerakan kiri medium.
3. Jika masukan adalah far maka level pergerakan kanan fast dan level pergerakan kiri slow.
Jarak (cm) Level pergerakan kiri Level pergerakan kanan
10 27,2 7,24
11 27 7,7
12 26,5 8,68
13 20 20
14 8,68 26,5
15 7,7 27
16 7,24 27,2
BAB IV
HASIL DAN PEMBAHASAN
Pada BAB ini terdapat beberapa bagian yaitu perubahan perancangan, hasil impelementasi, dan pembahasan. Perubahan rancangan terjadi menggantikan hasil perancangan pada BAB III, sedangkan untuk implementasi dan pembahasan robot merupakan hasil akhir realisasi robot pada perancangan robot dan pembahasan hasil dan pengaruh pada setiap sensor yang digunakan pada sistem secara keseluruhan.
4.1 Perubahan Perancangan
Penelitian ini mengalami peruhaan rancangan dan objektif robot sesuai dengan aturan Kontes Robot Indonesia 2021 yang baru. Perubahan rancangan terdapat pada batasan masalah, konfigurasi arena, perancangan mekanik robot, dan perancangan mekanik robot.
4.1.1 Perubahan Batasan Masalah
Perubahan batasan masalah dilakukan kerena penelitian akhir mengacu pada aturan Kontes Robot Indonesia (KRI) yang baru yaitu Kontes Robot Indonesia 2021. Dalam batasan masalah sebelumnya tertulis robot mampu memasuki ruangan yang sudah ditentukan. Pada peraturan kontes robot sebelumnya urutan masuk suatu ruangan sudah ditentukan, namun aturan pada kontes robot yang baru sudah tidak ada urutan masuk suatu ruangan. Maka, batasan masalah tersebut dihapus. Robot tidak harus menyelesaikan penyemprotan di semua ruangan tidak harus kembali ke home hal ini tidak wajib. Selain itu, pada batasan masalah menyatakan bahwa penyemprotan dilakukan secara menyebar.
Pada aturan kontes robot terbaru penyemprotan dilakukan secara terarah pada ruangan.
4.1.2 Perubahan Konfigurasi Arena
Perubahan konfigurasi arena dilakukan karena penelitian akhir mengacu pada aturan KRI (Kontes Robot Indonesia) yang baru. Pada aturan terdahulu dari kontes robot menyatakan bahwa arena memiliki 4 ruangan pada semua sesinya. Arah kompas pada ruangan juga diperhitungkan pada setiap sesinya. Pada aturan baru KRI 2021 (Kontes Robot Indonesia 2021), aturan ruangan diubah menjadi 2 ruangan [12]. Gambar 4.1 merupakan konfigurasi arena pada semua sesi. Robot bergerak mulai dari tanda home pada konfigurasi arena. Terdapat 2 variasi poisi robot yaitu robot menghadap utara dan selatan.
33
Gambar 4.1. Konfigurasi arena
4.1.3 Perubahan Mekanik Robot
Perubahan dimensi robot mengikuti KRI (Kontes Robot Indonesia) 2021. Dalam peraturan lama terdapat aturan dimensi robot yaitu ukuran maksimal panjang x lebar x tinggi yaitu 31cm x 31 cm x 27cm, sesuai dengan gambar 3.2, gambar 3.3, dan gambar 3.4.
Peraturan baru pada kontes robot tidak memiliki aturan dimensi robot. Perancangan mekanik robot pada ukuran tidak dibatasi oleh dimensi robot yang terdahulu.
Perubahan mekanik robot lain terjadi pada bagian kaki robot sesuai gambar 3.2, gambar 3.3, dan gambar 3.4, rancangan kaki yang digunakan menggunakan kaki empat (quadruped), namun pada penelitian ini robot menggunakan kaki enam (hexapod) untuk pergerakan. Rancangan robot ini digunakan juga dalam uji coba dan pengambilan data implementasi robot. Perubahan kaki robot dapat dilihat pada gambar 4.3 untuk tampak depan robot dan gambar 4.4 untuk tampak belakang robot.
4.1.4 Perubahan Perancangan Hardware Robot
Perancangan hardware mengalami perubahan pada penggunaan mikrokontroler master. Pada perancangan sebelumnya menggunakan arduino nano mikrokontroler master.
Mikrokontroler master diganti menggunakan Teensy 3.1, hal ini dikarenakan Teensy 3.1 dapat memproses data lebih cepat dan juga bisa digunakan untuk multitasking. Arduino Nano tidak mendukung pemrosesan multitasking sehingga menghasilkan pemrosesan data yang lambat. Gambar 4.2 merupakan perubahan perancangan mikrokontroler master.
Gambar 4.2 Perubahan mikrokontroler master
4.2 Hasil Implementasi
Gambar 4.3 Hasil implementasi mekanik robot (tampak depan)
Gambar 4.4 Hasil implementasi mekanik robot (tampak belakang)
Hasil implementasi robot memiliki ukuran dimensi panjang x lebar x tinggi yaitu 27 cm x 30 cm x 31 cm. Robot yang dibuat memiliki 3 bagian berdasarkan dengan ketinggian dan fungsi dari robot. Bagian robot pertama bagian atas, bagian robot kedua bagian kepala, dan bagian robot ketiga adalah bagian dalam robot. Gambar 4.3 dan Gambar 4.4 merupakan hasil implementasi robot.
Bagian pertama adalah bagian atas robot. Bagian atas robot terdiri dari 2 switch, sensor kompas, dan 2 sensor jarak. terdapat perbedaan fungsi dari setiap Switch. Switch 1 berfungsi untuk mengaktifkan robot dan switch 2 berfungsi untuk menjalankan robot. Sensor kompas diletakan pada bagian atas robot karena untuk mengurangi efek dari kuat medan listri yang ada pada bagian dalam robot. Dua sensor jarak ditempatkan di samping kiri dan kanan robot, fungsi dari sensor jarak ini ditempatkan di atas untuk dapat mengatur kemiringan robot agar bisa menghindar tembok pada sisi samping. Gambar 4.5 merupakan gambaran bagian pertama robot.
Gambar 4.5 Bagian pertama robot Keterangan :
1. Switch program jalan 2. Switch on robot 3. Sensor kompas 4. Sensor PING ke-1 5. Sensor PING ke-7
Bagian kedua adalah bagian kepala robot. Bagian kepala robot terdiri dari nozzle, servo mini, pompa, relay, botol penampung air, dan 5 buah sensor jarak. Bagian kepala robot berfungsi untuk penyemprotan robot yaitu nozzle, servo mini, pompa, botol penampung, dan relay, sedangkan 5 buah sensor jarak pada bagian kepala robot berfungsi untuk pengatur gerakan robot. Gambar 4.6, gambar 4.7, dan gambar 4.8 merupakan gambaran bagian kedua robot.
Gambar 4.6 Bagian kedua robot tampak depan
Gambar 4.7 Bagian kedua robot tampak samping kanan
Gambar 4.8 Bagian kedua robot tampak samping kiri Keterangan :
6. Servo penyemprot dan nozzle 7. Sensor PING ke-0
8. Sensor PING ke-5 9. Sensor PING ke-4 10. Sensor PING ke-2 11. Sensor PING ke-3 12. Relay
13. Pompa DC 12 Volt 14. Botol penampung air
Bagian ketiga adalah bagian dalam robot. Bagian dalam robot terdiri dari 2 mikrokontroler yaitu untuk master dan slave.
4.3 Pengujian dan Pembahasan Hardware
Hardware yang diuji dalam penelitian ini adalah seluruh sensor yang digunakan pada robot untuk mencari ruangan dan menyemprotkan cairan dalam ruangan. Pengujian setiap sensor pada subbab ini dilakukan dengan cara melakukan variasi pada pengujian sensor seperti aspek jarak, posisi robot, intensitas cahaya, dan perbedaan tekstur warna.
sensor ini dengan mengubah derajat hadap robot terhadap ruangan, pengukuran jarak sebenarnya dan hasil pembacaan sensor. Penggunaan sensor PING dalam penelitian ini sebanyak 7 buah sensor.
Gambar 4.9 Pengujian sensor jarak pada robot pada arah 0 derajat (utara) Keterangan :
1. Sensor PING ke-0 2. Sensor PING ke-4 3. Sensor PING ke-3
4. Sensor PING ke-2 5. Sensor PING ke-1 6. Sensor PING ke-6 7. Sensor PING ke-5
Garis merah merupakan gambaran pengukuran jarak dari setiap PING
Gambar 4.10 Kondisi khusus pada PING ke-0 Keterangan :
1. Sensor PING ke-0
2. Pengukuran jarak sensor PING ke-0 terhadap dinding
Gambar 4.11 Kondisi khusus pada PING ke-1 Keterangan :
1. Sensor PING ke-1
2. Pengukuran jarak sensor PING ke-0 terhadap dinding
Gambar 4.12 Serial monitor keluaran level pergerakan robot
Tabel 4.1 Hasil pengujian sensor Ultrasonik PING Arah
Robot (derajat)
Sensor PING
Jarak Seben arnya (cm)
Pemb acaan Senso r (cm)
Level pergerakan
Galat =
𝑠𝑒𝑏𝑒𝑛𝑎𝑟𝑛𝑦𝑎−𝑝𝑒𝑚𝑏𝑎𝑐𝑎𝑎𝑛 𝑠𝑒𝑛𝑠𝑜𝑟
| | 𝑥 100
𝑗𝑎𝑟𝑎𝑘 𝑠𝑒𝑏𝑒𝑛𝑎𝑟𝑛𝑦𝑎
kanan kiri
0 (Utara)
0 12,7 13
50 0
2,4
1 23,1 25 8,2
2 62 64 3,2
3 66 65 1,5
4 68 64 5,9
5 62 61 1,6
6 25,4 27 6,3
90 (Timur)
0 130 130
27 8
0
1 19,3 19 1,6
2 16 15 6,3
3 16,5 17 3
4 16 16 0
5 18 17 5,6
6 18 17 5,6
180 (Selatan
)
0 11,4 11
0 50
2,4
1 23 24 8,2
2 53,2 55 3,2
3 116,5 115 1,5
4 16,1 16 5,9
5 17,6 17 1,6
6 19,3 22 6,3
270 (Barat)
0 113 112
0 0
0
1 31,1 32 1,6
2 16,9 16 5,6
3 15,9 16 3
4 17,5 18 0
5 19,3 18 5,6
6 31,5 32 5,6
∑ 𝑔𝑎𝑙𝑎𝑡 𝑅𝑒𝑟𝑎𝑡𝑎 𝑔𝑎𝑙𝑎𝑡 =
𝑗𝑢𝑚𝑙𝑎ℎ 𝑑𝑎𝑡𝑎 3,8
Tabel 4.2 Level pergerakan kondisi khusus robot
No Kondisi khusus
Level pergerakan robot Kanan Kiri 1 PING ke-1 dekat dengan tembok saat wall follower kiri 0 15
PING ke-6 dekat dengan tembok saat wall follower kanan 15 0 2 PING ke-0 dekat dengan tembok saat wall follower kiri -5 20
PING ke-0 dekat dengan tembok saat wall follower kanan 20 -5
15 27 8
16 27 7
Tabel 4.4 Hasil keluaran pergerakan robot berdasarkan jarak wall follower kanan Jarak sensor PING keenam
(cm)
Level pergerakan kanan Level pergerakan kiri
10 27 7
11 27 78
12 27 9
13 20 20
14 9 27
15 8 27
16 7 27
PING ke-0 berfungsi untuk mengukur jarak pada bagian depan robot, PING ke-1 berfungsi untuk melakukan pengukuran dan pengkoreksian jarak sisi kiri pada bagian atas robot. PING ke-2 berfungsi untuk wall follower kiri, PING ke-3 berfungsi untuk mengukur bagian kiri robot yang sejajar dengan tembok, PING ke-4 berfungsi untuk mengukur bagian kanan robot yang sejajar dengan tembok, PING ke-5 berfungsi untuk wall follower kanan, PING ke-6 berfungsi untuk melakukan pengukuran dan pengkoreksian sisi kanan jarak sisi kanan pada bagian atas robot. Pengujian robot dilakukan secara keseluruhan sistem pergerakan robot, robot dapat membaca sensor jarak untuk dapat mengambil keputusan gerak robot. Pengujian sensor PING dapat dilihat pada gambar 4.9. Data pengujian sensor PING dapat dilihat pada tabel 4.1 dan 4.2.
Dari hasil penngujian pada sensor PING pada tabel 4.1 pembacaan sensor robot terhadap dinding memiliki rerata galat sebesar 3,8% sehingga memiliki tingkat keberhasilan sebesar 96,2%. Galat yang besar pada pengujian pembacaan sensor terjadi karena sensor PING membaca data pada bagian dinding yang tidak rata, sehingga membutukan waktu lama untuk sensor PING bagian penerima menerima gelombang. Hal inilah yang menjadikan
terjadinya perbedaan antara sensor PING dengan jarak sebenarnya. Karena galat pembacaan sensor yang dapat ditoleransi, hal ini tidak mengurangi fungsi dari sensor PING untuk membaca jarak.
Pergerakan robot menghasilkan keluaran pergerakan robot. Robot akan berjalan lurus ketika referensi PING ke-2 (wall follower kiri) dan PING ke-6 (wall follower kanan) mendeteksi jarak 13 dengan nilai level pergerakan kanan 20 dan kiri 20, apabila robot mendeteksi kurang dari 13 maka robot akan bergerak menghindari dinding dengan nilai keluaran level pergerakan kanan lebih tinggi dari level pergerakan kiri untuk wall follower kanan, dan sebaliknya untuk deteksi jarak lebih dari 13. Wall follower kiri memiliki nilai level pergerakan yang terbalik dengan wall follower kanan. Tabel 4.4 dan tabel 4.5 merupakan data hasil keluaran level pergerakan robot berdasarkan hasil pembacaan referensi sensor jarak. Ada kondisi khusus seperti belok robot pada gambar 4.10 referensi PING ke-0 akan mendeteksi jarak kurang dari 20, sehingga robot akan berputar ke arah kiri dengan keluaran level pergerakan kanan 20 dan kiri -5. Kondisi khusus pada gambar 4.11 dengan referensi PING ke-1 mendeteksi jarak 18 sehingga robot akan belok ke kanan dengan keluaran level pererakan kanan 0 dan kiri 15 seperti pada tabel 4.3. Gambar 4.12 merupakan data level pergerakan robot, format pada gambar 4.12 adalah *jarak, kanan, kiri”. Secara keseluruhan robot dapat memproses data masukan sistem berupa sensor jarak dan menghasilkan level pergerakan, dibantu dengan kondisi khusus robot bisa menghindari pergerakan yang dapat menghalang pergerakan robot seperti pada gambar 4.10 dan gambar 4.11.
4.3.2 Pengujian dan Pembahasan Sensor Warna
Pada penelitian ini sensor warna digunakan untuk mendeteksi garis putih pada pintu tiap ruang pada arena yang menjadi identifikasi bahwa robot memasuki ruangan sepenuhnya.
Sensor garis yang digunakan adalah TCS3200. Pengujian data sensor dilakukan dengan cara mengukur ketinggian pada objek yang akan diuji. Objek uji sendiri terdiri dari warna hitam, abu-abu, dan putih, selain itu terdapat variasi pengujian pada intensitas cahaya yang berbeda- beda. Tujuan dilakukannya pengujian pada sensor warna ini adalah untuk mengetahui ambang batas deteksi warna. Pengujian sensor warna dilakukan dengan sistem secara keseluruhan. Perolehan nilai karakteristik sensor diambil dari praktek lapangan. Gambar 4.15 Menunjukkan gambaran pengujian sensor warna pada robot.
Gambar 4.13 Posisi siap robot mendeteksi garis
Gambar 4.14 Serial monitor keluaran level pergerakan sensor warna
Gambar 4.15 Pengujian sensor garis pada robot Tabel 4.5 Karakteristik sensor warna TCS3200
No
Intensitas cahaya (LUX)
Jarak Sensor
(cm)
Warna
Pembacaan sensor
R (Red) G (Green) B (Blue)
1 200
3
Hitam 7532 7409 8445
Abu-abu 1390 4216 4352
Putih 280 854 853
4
Hitam 9467 9546 8012
Abu-abu 5367 5507 4420
Putih 1035 1111 946
5
Hitam 9036 9953 9486
Abu-abu 5688 5933 5042
Putih 1226 1277 1009
2 400
3
Hitam 2890 7181 8833
Abu-abu 1327 4084 4053
Putih 253 726 748
4
Hitam 5682 8998 8121
Abu-abu 5161 5321 4352
Putih 953 1097 916
5
Hitam 4019 7006 8092
Abu-abu 5511 5785 4894
Putih 1186 1245 987
3 1000
3
Hitam 2364 8186 2352
Abu-abu 1334 3843 1271
Putih 235 667 232
4
Hitam 4779 5464 3900
Abu-abu 1334 5022 4222
Putih 780 1045 876
Tabel 4.6 Hasil pembacaan garis
No Ruangan Posisi sebelum deteksi Posisi setelah deteksi Keterangan Nilai R Kanan Kiri Nilai R Kanan Kiri
1 1 9036 27 7 322 0 0 Berhasil
2 2 11400 26 8 314 0 0 Berhasil
3 1 10235 26 8 327 0 0 Berhasil
4 2 9902 26 8 312 0 0 Berhasil
5 1 9802 50 0 413 0 0 Berhasil
6 2 10112 7 27 423 0 0 Berhasil
7 1 10020 8 26 312 0 0 Berhasil
8 2 9002 8 26 334 0 0 Berhasil
9 1 9435 7 27 423 0 0 Berhasil
10 2 9955 0 50 442 0 0 Berhasil
Keberhasilan 100%
Dari tabel 4.5 sensor warna dapat karakteristik deteksi objek uji dengan variasi intensitas cahaya dan variasi jarak dengan objek uji. Terdapat perbedaan nilai dari objek uji warna yang ada yaitu warna hitam, abu-abu, dan putih. Saat sensor mendeteksi warna hitam, maka nilai dari R (Red) akan lebih besar dari warna abu-abu dan putih. Saat sensor mendeteksi warna abu-abu, maka nilai dari R (Red) akan lebih besar dari putih namun masih lebih rendah dari hitam. Saat sensor mendeteksi warna putih, maka nilai R (Red) akan lebih kecil dari hitam dan abu-abu. Pendeteksian warna bisa dilakukan oleh sensor dengan variasi intensitas cahaya dan jarak sensor dengan objek uji. Dengan adanya perbedaan pembacaan yang signifikan antara warna hitam, abu-abu, dan putih sensor TCS3200 bisa digunakan pada penelitian ini.
Robot akan terus berusaha mendeteksi warna yang diinginkan yaitu warna putih, mikrokontroler master terus melakukan multitasking untuk deteksi warna. Robot akan berhenti dan mengambil posisi siap apabila robot sudah dapat mendeteksi warna putih sesuai dengan gambar 4.13. Dari tabel 4.6 robot berhenti setelah dapat mendeteksi garis, identifikasi robot berhenti sesuai dengan hasil pergerakan robot yang dihasilkan adalah 0,
sedangkan sebelum mendeteksi garis robot berjalan dengan level pergerakan sesuai dengan tabel 4.6.
Gambar 4.14 merupakan nilai keluaran level pergerakan robot sesuai dengan sensor warna TCS3200. Pada nilai kisaran 10000 robot masih melakukan pergerakan dengan identifikasi nilai level pergerakan 27,7, tetapi setelah robot mendeteksi garis maka robot berhenti dengan nilai level pergerakan robot 0,0.
Terdapat aturan pada KRI (Kontes Robot Indoensia) yang mengharuskan intensitas cahaya yang ada pada arena minimal sebesar 300 lux. Pada karakteristik sensor TCS3200 bisa mendeteksi perbedaan objek uji mulai dari intensitas cahaya 200 lux sampai dengan 1000 lux, sehingga sensor TCS3200 memenuhi aturan KRI (Kontes Robot Indonesia) dengan minimal pencahayaan 300 lux. Sensor warna dapat mendeteksi sensor garis dengan tingkat keberhasilan 100%.
4.3.3 Pengujian dan Pembahasan Sensor Kompas
Pada penelitian ini sensor kompas digunakan untuk mendeteksi arah kompas yang berperan untuk membantu robot mengambil keputusan untuk bergerak. Sensor kompas yang digunakan adalah GY-26. Pengujian data pada sensor ini dilakukan dengan cara memberikan variasi derajat kemiringan pada sensor kompas. Tujuan dilakukannya pengujian ini untuk mengetahui pendeteksian arah kompas oleh sensor GY-26. Akurasi yang dihasikan oleh pengukuran sensor kompas GY-26 dengan pengukuran arah kompas sebenarnya. Tabel 4.7 merupakan batasan nilai identifikasi arah kompas robot dan tabel 4.8 pengujian sensor kompas.
Gambar 4.16 Pengujian sensor kompas pada robot Keterangan :
1. Sensor kompas GY-26 2. Arah kompas timur 3. Arah kompas selatan 4. Arah kompas barat 5. Arah kompas utara
Tabel 4.7 Batas nilai identifikasi arah kompas robot
No Batas nilai (derajat) Keterangan
1 Nilai kompas > 315 atau nilai kompas < 45 Utara
2 45 < Nilai kompas < 135 Timur
3 135 < Nilai kompas < 225 Selatan
4 225 < Nilai kompas < 315 Barat
![Gambar 2.2 Konfigurasi arena sesi 2 [11]](https://thumb-ap.123doks.com/thumbv2/123dok/3702211.3912312/23.893.258.629.136.1089/gambar-konfigurasi-arena-sesi.webp)
![Gambar 2.5 Mapping Atmega328 [4]](https://thumb-ap.123doks.com/thumbv2/123dok/3702211.3912312/24.893.263.628.190.812/gambar-mapping-atmega.webp)
![Gambar 2.6 Arsitektur mikrokontroler[3]](https://thumb-ap.123doks.com/thumbv2/123dok/3702211.3912312/25.893.174.730.135.984/gambar-arsitektur-mikrokontroler.webp)