SKRIPSI
Oleh :
RIZAL FEBRIYANTO
0734010243
J URUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
SKRIPSI
Diajukan Untuk Memenuhi Sebagian Per syar atan Dalam Memperoleh Gelar Sar jana Komputer
J ur usan Teknik Infor matika
Oleh :
RIZAL FEBRIYANTO
0734010243
J URUSAN TEKNIK INFORMATIKA
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL “VETERAN”
J AWA TIMUR
ABSTRAK
Salah satu teknologi yang berkembang pesat saat ini adalah teknologi di bidang kerobotan. Robot berguna untuk membantu manusia dalam melakukan pekerjaan tertentu misalnya untuk melakukan pekerjaan yang memerlukan ketelitian tinggi, beresiko tinggi dan yang membutuhkan tenaga besar. Robot dapat didefinisikan sebagai sebuah piranti mekanik yang mampu melakukan pekerjaan manusia atau berperilaku seperti manusia.
Robot pendeteksi ruang bercahaya ultraviolet ini dirancang agar dapat mengetahui ada tidaknya sumber cahaya di dalam suatu ruangan, dan secara otomatis robot akan mendeteksi adanya sumber cahaya ultraviolet kemudian akan memberikan sebuah warning ke LCD. Untuk dapat mengetahui keberadaan sumber cahaya ultraviolet menggunakan sensor Uvtron R2868 dan untuk mendeteksi sebuah dinding maka perlu menggunakan sensor Ping Parallax, sehingga robot ini nanti dapat bergerak secara otomatis dimana komponen-komponen di dalamnya tersusun dan dikontrol oleh mikrokontroler ATMega16 (master) dan mikrokontroler ATMega8 (slave). Dalam hal ini mikrokontroler
master bertindak sebagai pengontrol motor DC, driver motor, sensor uvtron, LCD.
Sedangkan mikrokontroler slave bertindak sebagai pengontrol sensor ultrasonik yang terdapat pada robot dan robot pendeteksi ruang bercahaya ini hanya mengikuti dinding sebelah kiri dengan menggunakan metode left wall following.
Ujicoba dilakukan dengan menggunakan arena dimana robot pendeteksi ruang bercahaya ultraviolet akan mencari sumber cahaya secara otomatis. Dengan menggunakan arena yang telah disediakan robot pendeteksi ruang bercahaya ultraviolet, hanya membutuhkan waktu 2,5 menit untuk menemukan sumber cahaya yang ada dalam arena.
Kata kunci: Robot pendeteksi cahaya, Robot pendeteksi cahaya UV, Robot
Alhamdulillah, dengan mengucapkan puji dan syukur kehadirat Allah SWT atas
rahmat dan hidayah-Nya sehingga penulis dapat menyelesaikan tugas akhir ini dengan judul
“ROBOT PENDETEKSI RUANG BERCAHAYA ULTRAVIOLET” yang merupakan
persyaratan dalam memperoleh gelar Sarjana Komputer di Universitas Pembangunan
Nasional “VETERAN” Jatim.
Penulis mengucapkan terima kasih yang sebesar-besarnya kepada pihak-pihak yang
telah membantu dalam menyelesaikan penulisan tugas akhir ini, terutama kepada:
1. Orang tua tercinta, bapak sumantoro dan keluarga kekasih tercinta meme (Lidya mita
januarini ) dimanapun berada. Terima kasih atas kasih sayang, dukungan dan do’anya.
2. Dekan FTI Bapak Ir.Sutiyono, MT
3. Bapak Prof. Dr. Ir. Teguh Soedarto, MP, selaku Rektor UPN “Veteran” Jatim.
4. Bapak Ir. Sutiyono, MT selaku DEKAN FTI UPN “VETERAN” Jatim.
5. Ibu Dr.Ir.Ni Ketut Sari, MT selaku Kepala Jurudan Teknik Informatika, FTI UPN
“VETERAN” Jatim.
6. Bapak Basuki Rahmat, S.Si. dan Ir.Kartini, MT selaku Dosen Pembimbing yang telah
meluangkan waktu untuk memberikan bimbingan selama proses pelaksanaan Tugas
Akhir penulis.
7. Ir. Kindriari Nurma W, MT, selaku PIA TA yang telah mendukung proses pelaksanaan
Tugas Akhir penulis.
8. Special to: mas Salman yang membantu saya dalam pembuatan tugas akhir ini dan
memberikan ilmu pengetahuannya.
DAFTAR ISI
2.1.1 Pin-Pin Pada Mikrokontroler Atmega16 ... 8
2.1.2 Input / Output ... 10
2.1.3 CPU ... 10
2.1.5 Flash Memori ... 11
2.1.6 EEPROM ... 12
2.1.7 Timer ... 12
A. Timing Diagram Timer/Counter ... 13
B. Deskripsi Register Timer/Counter 8 bit ... 15
C. Register Timer/Counter TCNT0 ... 19
D. Register Timer/Counter OCR0... 19
E. Register Timer/Counter Interrupt Mask ... 20
F. Register Timer/Counter Register – TIFR ... 20
2.2 Motor DC ... 21
2.2.1 Prinsip Dasar Cara Kerja Motor DC ... 22
2.2.2 Motor DC Servo ... 23
2.3 Sensor Ultrasonik... 28
2.4 Sensor Uvtron R2868 Hamamatsu ... 29
2.5 LCD (Liquid Crystal Display) ... 30
BAB III PERANCANGAN ... 33
3.1 Perancangan Robot ... 33
3.2 Flowchart... 34
3.4 Blok Diagram ... 36
3.5 Kebutuhan Perancanga Hardware Robot ... 37
3.6 Cara Merancang Robot ... 38
3.7 Analisis Perancangan Motor DC ... 38
3.7.1 Rancangan Dan Analisis Robot ... 39
3.7.3 Rancangan Motor Saat Belok ke Kanan... 40
5.1.2 Pengujian Sensor Ultrasonik ... 68
A. Pengujian Sensor Ultrasonik Manual ... 68
B. Pengujian Sensor Ultrasonik Menggunakan Arena . 69
5.1.3 Pengujian Sensor Uvtron ... 69
A. Pengujian Sensor Uvtron Manual ... 70
B. Pengujian Sensor Uvtron Menggunakan Arena ... 70
Ultraviolet ... 71
A. Pengujian Robot Pendeteksi Ruang Bercahaya Menggunakan Satu Lampu ... 71
B. Pengujian Robot Pendeteksi Ruang Bercahaya Menggunakan Dua Lampu ... 72
5.2 Analisa ... 73
5.2.1 Analisa Robot Pendeteksi Ruang Bercahaya Ultraviolet ... 74
5.3 Analisa Pengujian ... 76
BAB VI PENUTUP ... 79
6.1 Kesimpulan... 79
6.2 Saran ... 80
DAF TAR TABEL
Halaman
Tabel 2.1 Fungsi Khusus Port B ... 9
Tabel 2.2 Fungsi Khusus Port ... 9
Tabel 2.3 Fungsi Khusus Port D... 9
Tabel 2.4 Deskripsi Bit Mode Pembangkit Bentuk Gelombang ... 16
Tabel 2.5 Mode Output Pembanding, Tanpa PWM... 17
Tabel 2.6 Mode Output Pembanding, Mode fast PWM... 18
Tabel 2.7 Mode Output Pembanding, Mode Phase Correct PWM ... 18
Tabel 2.8 Deskripsi Bit Clock Select... 18
DAF TAR GAMBAR
Gambar 2.5 Blok Diagram Timer/Counter ... 13
Gambar 2.6 Timing Diagram Timer/Counter, Tanpa Prescaling ... 14
Gambar 2.7 Timing Diagram Timer/Counter, Dengan Prescaling ... 14
Gambar 2.8 Timing Diagram Timer/Counter, Dengan Pescaler ... 15
Gambar 2.9 Timing Diagram Timer/Counter, Menyeting OCFO,
Gambar 2.15 Medan Magnet Yang Membawa Arus Mengelilingi Konduktor ... 22
Gambar 2.16 Motor DC ... 23
Gambar 2.17 Motor Servo Dan Diagram Pengkabelannya24 Gambar 2.18 Pensinyalan Motor Servo ... 25
Gambar 2.20 Grafik Karakteristik Motor Dc Servo ... 27
Gambar 2.21 Prinsip Kerja Sensor Ultrasonic ... 28
Gambar 2.22 Sensor Ultrasonik Ping Parallax ... 29
Gambar 2.23 Bentuk Fisik Tabung Uvtron Dengan Board ... 30
Gambar 2.24 Sudut Kepekaan Terhadap Obyek... 30
Gambar 2.25 Pin Out LCD M1632 Standard ... 31
Gambar 2.26 Blok Diagram LCD Dan Driver ... 31
Gambar 2.27 Rangkaian LCD Pada AVR ... 32
Gambar 3.1 Flowchart Robot Pendeteksi Ruang Bercahaya Ultraviolet Keseluruhan ... 34
Gambar 3.2 Flowchart Robot Pendeteksi Ruang Bercahaya Ultraviolet Pada Mikrokontroler ... 35
Gambar 3.10 Rancangan Robot Pendeteksi Ruang Bercahaya Ultraviolet ... 44
Gambar 3.11 Rangkaian PCB Mikro ... 45
Gambar 3.12 Rangkaian PCB Driver ... 45
Gambar 3.14 Rancangan Arena Robot ... 48
Gambar 4.14 Diagram Blok Pengendalian Motor Kanan Pada Metode Left Wall Following ... 57
Gambar 4.15 Rangkaian PCB Mikro ... 63
Gambar 4.16 Rangkaian PCB driver ... 63
Gambar 4.17 Robot Pendeteksi Ruang Bercahaya Ultraviolet Tampak Dari Samping Kiri ... 64
Gambar 4.18 Robot Pendeteksi Ruang Bercahaya Ultraviolet Tampak Dari Samping Kanan ... 65
Gambar 4.20 Robot Pendeteksi Ruang Bercahaya Ultraviolet Tampak
Dari Depan ... 66
Gambar 5.1 Pengujian Motor Driver ... 67
Gambar 5.2 Pengujian Sensor Ultrasonik Manual ... 68
Gambar 5.3 Pengujian Sensor Ultrasonik Pada Robot Menggunakan
Arena... 69
Gambar 5.4 Pengujian sensor Uvtron Manual ... 70
Gambar 5.5 Pengujian Sensor Uvtron Menggunakan Arena ... 71
Gambar 5.6 Pengujian Robot Pendeteksi Ruang Bercahaya Ultraviolet
Menggunakan Satu Lampu ... 72
Gambar 5.7 Pengujian Robot Pendeteksi Ruang Bercahaya Ultraviolet
Menggunakan Dua Lampu ... 72
Gambar 5.8 Warning Robot Pendeteksi Ruang Bercahaya Ultraviolet
1.1 Latar Belakang
Seiring dengan perkembangan teknologi yang sekarang ini semakin pesat,
kebutuhan akan kenyamanan, ketepatan dan kecepatan dalam segala bidang
semakin meningkat bahkan cenderung mengarah ke sebuah tuntutan.
Peralatan-peralatan kontrol baik manual maupun otomatis sekarang semakin banyak
bermunculan dengan teknologi canggih dan modern. Kemudian disusul dengan
berkembangnya perangkat elektronika yang mampu mengubah sistem analog
menjadi sistem digital.
Salah satu teknologi yang berkembang pesat saat ini adalah teknologi
di bidang kerobotan. Robot berguna untuk membantu manusia dalam
melakukan pekerjaan tertentu misalnya untuk melakukan pekerjaan yang
memerlukan ketelitian tinggi, beresiko tinggi, membosankan atau yang
membutuhkan tenaga besar. Robot dapat didefenisikan sebagai sebuah piranti
mekanik yang mampu melakukan pekerjaan manusia atau berprilaku seperti
manusia.
Dalam tugas akhir ini akan direncanakan dan dibuat sebuah miniature robot
pendeteksi cahaya ultraviolet yang dapat berjalan otomatis dan dapat mencari atau
mendeteksi sumber cahaya ultraviolet dengan tepat dan mendeteksi sumber
cahaya tersebut. Bagian-bagian dari robot itu sendiri merupakan sebuah perangkat
elektronika dengan menggunakan mikrokontroler yang sudah diprogram oleh
1.2 Rumusan Masalah
Berdasarkan latar belakang diatas, maka dapat diambil rumusan masalah
sebagai berikut :
1. Bagaimana membuat atau merangkai sebuah robot yang dapat berjalan dan
mendeteksi apa bila ada sumber cahaya ultraviolet.
2. Bagaimana menggabungkan progam secara kesuluruhan sehingga robot dapat
melakukan tugasnya dengan benar.
3. Bagaimana mengontrol kecepatan putar motor DC.
4. Bagaimana membuat robot mendeteksi adanya halangan saat mencari sumber
cahaya ultraviolet.
1.3 Batasan Masalah
Batasan - batasan masalah yang diberikan sesuai dengan permasalahan
yang telah diterangkan diatas, antara lain:
1. Robot ini menggunakan UVTron Flame Sensor sebagai sensor cahaya dan
sensor Ping Parallax sebagai sensor dinding.
2. Robot menyala otomatis dan mendeteksi sumber cahaya ultraviolet yang ada
di dalam suatu ruang.
3. Jika robot menabrak rintangan maka sensor akan mendeteksi rintangan
sehingga motor pada roda akan berfungsi untuk merubah jalur dan akan
berjalan lagi pada jalur yang sudah di tentukan.
4. Robot ini hanya akan mengikuti dinding sebelah kiri dengan menggunakan
metode left wall following.
1.4 Tujuan
Tujuan yang ingin dicapai dalam Tugas Akhir ini adalah :
1. Merancang robot yang mampu berjalan untuk merubah alur jika ada rintangan.
2. Merancang robot yang mampu mendekteksi nyala sumber cahaya di dalam
suatu ruang dan memberi peringatan bahwa telah ditemukan sebuah sumber
cahaya ultraviolet.
3. Merancang robot yang mampu membedakan ruangan mana yang terdapat
sumber cahaya dan tidak.
1.5 Manfaat
Adapun manfaat yang dapat diambil dari pembuatan robot pendeteksi
cahaya ultraviolet dengan menggunakan sensor ini adalah:
1. Dapat digunakan untuk mendeteksi sumber cahaya ultraviolet.
2. Memahami cara kerja sensor yang digunakan.
1.6 Metodologi Per ancangan
Dalam penyusunan dan pengerjaan tugas akhir ini diperlukan suatu urutan
pekerjaan yang dapat digunakan sebagai acuan untuk melaksanakan pekerjaan
tersebut, hal ini dimaksudkan agar dalam penyusunan dan pengerjaan tugas akhir
ini dapat tercapai tujuannya secara maksimal dengan waktu yang telah ditentukan.
Oleh sebab itu kami merencanakan langkah – langkah yang sekiranya dapat
memaksimalkan dalam pelaksanaan pengerjaan tugas akhir ini. Dan Metode
perancangan yang digunakan sebagai berikut :
Studi literatur sebagai dasar perancangan dan pembuatan alat. Dalam
studi literatur ini dipelajari teori – teori yang kiranya dapat menunjang
maupun memberi gambaran tentang apa yang nantinya dikerjakan
dalam project work.
2. Perancangan perangkat keras
Pada perancangan perangkat keras penulis membuat kerangka robot,
driver motor rangkaian minimum system mikrokontroler AVR
ATMega16, rangkaian mikrokontroler dengan sensor ultrasonik,
rangkaian mikrokontroler dengan sensor Uvtron R2868.
3. Perancangan perangkat lunak
Setelah semua perangkat keras telah selesai dikerjakan maka akan
dilakukan perancangan perangkat lunak berupa diagram alir dan
pembuatan program dari diagram alir tersebut kedalam
mikrokontroler.
4. Pengujian robot
Setelah perangkat keras dan perangkat lunak selesai dikerjakan maka
tahap selanjutnya adalah pengujian robot, jika hasil pengujian tidak
sesuai dengan yang diharapkan maka akan dilakukan perbaikan
sehingga tujuan tercapai.
1.7 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan kerangka penulisan sebagai berikut :
Pada bab ini mengurai tentang latar belakang, perumusan
masalah, batasan masalah, tujuan,manfaat, dan sistematika
penulisan.
Pada bab ini membahas tentang perancangan perangkat
keras dan perancangan perangkat lunak protoype robot
pendeteksi sumber cahaya ultraviolet.
BAB IV : IMPLEMENTASI PERANCANGAN
Pada bab ini membahas mengenai implementasi
perancangan perangkat keras maupun perancangan
perangkat lunak yang telah dirancang
BAB V : PENGUJIAN DAN ANALISA ROBOT
Bab ini membahas tentang pengujian driver motor, sensor
ultrasonik , sensor uvtron secara terpisah dan pengujian
robot, dan analisa robot.
BAB VI : KESIMPULAN DAN SARAN
Bab ini membahas tentang kesimpulan dan saran yang
bermanfaat bagi perbaikan dan perkembangan robot
Dalam perancangan pembuatan robot pendeteksi robot pendeteksi ruang
bercahaya ultraviolet menggunakan mikrokontroler AVR ATMega16 dan
ATMega8 dan rangkaian pendukung seperti, sensor ultrasonik (sensor dinding)
buatan Ping Parallax dan sensor pendeteksi cahaya UVTron R2868 buatan
Hamamatsu.
2.1 Mikr okontroler AVR ATMega16
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis
atau dihapus.Biasanya digunakan untuk pengontrolan otomatis dan manual pada
perangkat elektronika.
Beberapa tahun terakhir, mikrokontroler sangat banyak digunakan terutama
dalam pengontrolan robot. Seiring perkembangan elektronika, mikrokontroler
dibuat semakin kompak dengan bahasa pemrograman yang juga ikut berubah.
Salah satunya adalah mikrokontroler AVR (Alf and Vegard’s Risc processor)
Atmega 16 yang menggunakan teknologi RISC (Reduce Instruction Set
Computing) dimana program berjalan lebih cepat karena hanya membutuhkan
satu siklus clock untuk mengeksekusi satu instruksi program. Secara umum, AVR
dapat dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90Sxx,
keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan
Mikrokontroler AVR ATmega16 memiliki fitur yang cukup lengkap.
Mikrokontroler AVR ATmega16 telah dilengkapi dengan ADC internal,
EEPROM internal, Timer/Counter, PWM, analog comparator, dll (M.Ary
Heryanto, 2008). Sehingga dengan fasilitas yang lengkap ini memungkinkan kita
belajar mikrokontroler keluarga AVR dengan lebih mudah dan efisien, serta dapat
mengembangkan kreativitas penggunaan mikrokontroler ATmega16.
Gambar 2.1 Bagian Mikrokontroler AVR
Fitur-fitur yang dimiliki oleh mikrokontroler Atmega16 adalah sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D.
2. ADC internal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
9. Antarmuka komparator analog.
10. Port USART untuk komunikasi serial.
11. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16
MHz.
12. Dan lain-lainnya.
2.1.1 Pin-pin pada Mikr okontr oler ATmega16
Gambar 2.2 Pin-pin ATMega16 Kemasan 40-Pin
Konfigurasi pin Atmega16 dengan kemasan 40 pin DIP (Dual Inline
Package) dapat dilihat pada gambar 2.2 . Dari gambar di atas dapat dijelaskan
fungsi dari masing-masing pin Atmega16 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya.
2. GND merukan pin Ground.
3. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan pin
4. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan dan pin
fungsi khusus.
Tabel 2.1 Fungsi Khusus Port B
Pin Fungsi Khusus
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/ Slave Output)
PB5 MOSI (SPI Bus Master Output/ Slave Input)
PB4 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input)
OC0 (Timer/Counter0 Output Compare Match Output)
PB2 AIN0 (Analog Comparator Positive Input)
INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/ Counter1 External Counter Input)
PB0 T0 T1 (Timer/Counter External Counter Input)
XCK (USART External Clock Input/Output)
Tabel 2.2 Fungsi Khusus Port C
Pin Fungsi k husus
PC7 TOSC2 ( Timer Oscillator Pin2)
PC6 TOSC1 ( Timer Oscillator Pin1)
PC5 Input/Output
PC4 Input/Output
PC3 Input/Output
PC2 Input/Output
PC1 SDA ( Two-wire Serial Buas Data Input/Output Line)
PC0 SCL ( Two-wire Serial Buas Clock Line)
6. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
Tabel 2.3 Fungsi Khusus Port D
Pin Fungsi khusus
PD7 OC2 (Timer/Counter Output Compare Match Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD5 OC1A (Timer/Counter1 Output Compare A Match
PD4 OC1B (Timer/Counter1 Output Compare B Match
Output)
PD3 INT1 (External Interrupt 1 Input)
PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
7. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
8. AVCC merupakan pin masukan tegangan untuk ADC.
9. AREFF merupakan pin masukan tegangan referensi ADC.
2.1.2 Input / Output
I/O digunakan untuk melakukan hubungan dengan piranti di luar sistem.
I/O dapat menerima data dari alat lain dan dapat pula mengirim data ke alat lain.
Ada dua perantara I/O yang dipakai, yaitu piranti untuk hubungan serial
(UART) dan piranti untuk hubungan paralel (PIO).
2.1.3 CPU
Unit pengolah pusat (CPU) terdiri atas dua bagian yaitu unit pengendali
(CU) serta unit aritmatika dan logika (ALU). Fungsi utama unit pengendali
adalah untuk mengambil, mengkode, dan melaksanakan urutan instruksi sebuah
program yang tersimpan dalam memori. Sedangkan unit aritmatika dan
perhitungan bertugas untuk menangani operasi perhitungan maupun bolean
dalam program.
Penempatan memori data yang lebih rendah dari 1120
menunjukkan register, I/O memori, dan data internal SRAM. 96 alamat memori
pertama untuk file register dan memori I/O, dan 1024 alamat memori berikutnya
untuk data internal SRAM. Lima mode pengalamatan yang berbeda pada data
memori yaitu direct, indirect, indirect dis-placement, indirect pre-decreament
dan indirect post-increament .Pada file register, mode indirect mulai dari
register I/O dan 1024 data internal SRAM yang dapat mengakses semua
mode-mode pengalamatan.
2.1.5 Flash Memor i
Atmega16 memiliki 8K byte flash memori dengan lebar 16 atau 32 bit.
Kapasitas memori itu sendiri terbagi manjadi dua bagian yaitu bagian boot
program dan bagian aplikasi program. Dapat dilihat bagan kapasitas memori
Atmega16 pada gambar 2.4.
Gambar 2.4 Peta Memori Flash Flash Memori
2.1.6 EEPROM
Atmega16 memiliki memori EEPROM sebesar 512 byte yang terpisah dari
memori program maupun memori data. Memori EEPROM ini hanya dapat
diakses dengan menggunakan register-register I/O yaitu register EEPROM
Address, register EEPROM Data, dan register EEPROM Control. Untuk
mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal,
sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan
2.1.7 Timer
Timer/couter adalah tujuan umum single channel, module 8 bit
timer/counter. Beberapa fasilitas chanel dari timer counter antara lain:
a. Counter channel tunggal
b. Pengosongan data timer sesuai dengan data pembanding
c. Bebas -glitch, tahap yang tepat Pulse Width Modulation (PWM)
d. Pembangkit frekuensi
e. Event counter external
Gambar 2.5 Blok Diagram Timer/Counter
Untuk penempatan pin I/O telah di jelaskan pada18 bagi I bit hal 67 an
I/O di atas. CPU dapat diakses register I/O, termasuk dalam pinpin I/O dan bit
I/O.Device khusus register I/O dan lokasi bit terdaftar pada deskripsi
timer/counter 8 bit .Dan ada beberapa cara kerja dari timer/counter tersebut adalah
A. Timing Diagr am Timer/Counter
Timer/counter disain sinkron clock timer (clkT0) oleh karena itu
ditunjukan sebagai sinyal enable clock pada gambar berikut. Gambar ini
termasuk informasi ketika flag interrupt dalam kondisi set. Data timing digunakan
sebagai dasar dari operasi timer/counter.
Gambar 2.6 Timing Diagram Timer/Counter, Tanpa Prescaling
Sesuai dengan gambar dibawah timing diagram timer/counter dengan
prescaling maksudnya adalah counter akan menambahkan data counter (TCNTn)
ketika terjadi pulsa clock telah mencapai 8 kali pulsa dan sinyal clock pembagi
aktif clock dan ketika telah mencapai nilai maksimal maka nilai TCNTn akan
kembali ke nol. Dan kondisi flag timer akan aktif ketika TCNTn maksimal.
Sama halnya timing timer diatas, timing timer/counter dengan seting
OCFO timer mode ini memasukan data ORCn sebagai data input timer. Ketika
nilai ORCn sama dengan nilaiTCNTn maka pulsa flag timer akan aktif. TCNTn
akan bertambah nilainya ketika pulsa clock telah mencapai 8 pulsa. Dan kondisi
flag akan berbalik (komplemen) kondisi ketika nilai TCNTn kembali ke nilai
0 (overflow).
Gambar 2.8 Timing Diagram Timer/Counter, Dengan Pescaler
Ketika nilai ORCn sama dengan nilai TCNTn maka pulsa flag timer akan
aktif. TCNTn akan bertambah nilainya ketika pulsa clock telah mencapai 8
pulsa. Dan kondisi flag akan berbalik (komplemen) kondisi ketika nilai
TCNTn kembali ke nilai 0 (overflow).
Gambar 2.9 Timing Diagram Timer/Counter, Menyeting Ocfo,
B. Deskr ipsi Register Timer /Counter 8 bit
Gambar 2.10 Regiter Timer Counter 8 Bit
a. Bit 7 – FOCO : perbandingan kemampuan output.
FOCO hanya akan aktif ketika spesifik-spesifik bit WGM00 tanpa PWM
mode. Adapun untuk meyakinkan terhadap kesesuaian dengan device-device
yang akan digunakan,bit ini harus diset nol ketika TCCRO ditulisi saat
mengunakan OCR0 sebagai puncak. FOC0 selalu dibaca nol.
b. Bit 6,3 – WGM01:0: Waveform Generation Mode.
Bit ini mengontrol penghitungan yang teratur pada counter, sumber untuk
harga counter maksimal ( TOP )., dan tipe apa dari pembangkit bentuk
gelombang yang digunakan. Mode-mode operasi didukung oleh unit
timer/counter sebagai berikut : mode normal, pembersih timer pada mode
penyesuaian dengan pembanding ( CTC ), dan dua tipe mode Pulse
Width Modulation ( PWM).
catatan : definisi nama-nama bit CTC0 dan PWM0 sekarang tidak digunakan
lagi.Gunakan WGM 01: 0 definisi. Bagaimanapun lokasi dan fungsional
dan lokasi dari masing- masing bit sesuai dengan versi timer sebelumnya.
c. Bit 5:4– COMO1:0 Penyesuaian Pembanding Mode Output.
Bit ini mengontrol pin output compare (OCO), jika satu atau kedua bit
COM01:0 diset,output OC0 melebihi fungsional port normal I/O dan keduanya
terhubung juga. Bagaimanapun, catatan bahwa bit Direksi Data Register (DDR)
mencocokan ke pin OC0 yang mana harus diset dengan tujuan
mengaktifkan.Ketika OC0 dihubungkan ke pin, fungsi dari bit COM01:0
tergantung dari pengesetan bit WGM01:0. Tabel di bawah menunjukan COM
fungsionality ketika bit-bit WGM01:0 diset ke normal atau mode CTC (non PWM
).
Tabel di bawah menunjukan bit COM01:0 fungsionality ketika bit WGM01:0
diset ke mode fast PWM.
Tabel 2.6 Mode Output Pembanding, Mode fast PWM
Tabel di bawah menunjukan bit COM01:0 fungsionality ketika bit WGM01:0
diset ke mode phase correct PWM.
Tabel 2.7 Mode Output Pembanding, Mode Phase Correct PWM
d. Bit 2:0 – CS02:0 : Clock Select.
Tiga bit clock select sumber clock digunakan dengan timer/counter.
Jika mode pin eksternal digunakan untuk timer counter0, perpindahan
dati pin T0 akan memberi clock counter dengan tetap jika pin digunakan sebagai
output. Dalam hal ini software diijinkan untuk mengontrol perhitungan.
C. Register Timer /Counter TCNT0
Gambar 2.11 Register Timer TCNT0
Register timer/counter memberikan akses secara langsung, keduanya
dugunakan untuk membaca dan menulis operasi, untuk penghitung unit 8-bit
timer/counter. Menulis ke blok-blok register TCNT0 ( removes ) disesuaikan
dengan clock timer berikutnya. Memodifikasi counter ( TCNT0 ) ketika
perhitungan berjalan, memperkenalkan resiko kehilangan perbandingan antara
TCNC0 dengan register OCR0.
D.Register Timer /Counter OCR0
Gambar 2.12 Register Timer OCR0
Register output pembanding berisi sebuah haraga 8 bit yang mana secara
terus-menerus dibandingkan dengan harga counter (TCNT0). Sebuah
pembanding, atau untuk membangkitakan sebuah output bentuk gelombang
pada pin OC0.
E. Register Timer /Counter Inter r upt Mask
a. Bit 1 – OCIE0: output timer counter menyesuaikan dengan
kesesuaian interrupt yang aktif. Ketika bit OCIE0 ditulis satu, dan I-bit
pada register status dalam kondisi set (satu), membandingkan
satu ), timer/counter melebihi interrupt diaktifkan. Mencocokkan
interrupt dijalankan jika kelebihan pada timer/counter0 terjadi,
ketika bit TOV0 diset pada register penanda timer/counter- TIFR.
F. Register Timer /Counter Register – TIFR
a. Bit 1 – OCF0: Output Compare Flag0.
OCF0 dalam kondisi set ( satu ) kesesuaian pembanding terjadi
antara timer/counter dan data pada OCRO – Register 0 keluaran
pembanding. OCF0 diclear oleh hardware ketika eksekusi
pencocokan penangan vector interrupt. Dengan alternatif
mengclearkan OCF0 dengan menuliskan logika satu pada flag. Ketika
I-bit pada SREG, OCIE0 (Timer/Counter0 penyesuaian pembanding
interrupt enable), dan OCF0 diset (satu), timer/counter pembanding
kesesuaian interrupt dijalankan.
b. Bit 0 – TOV0: Timer/Counter Overflow Flag.
Bit TOV0 di ser ( satu ) ketika kelebihan terjadi pada
timer/counter0. TOV0 diclearkan dengan hardware ketika penjalanan
pencocokan penanganan vector interrupt. Dengan alternatif, TOV0
Motor listrik adalah merupakan perangkat elektromagnetis yang
mengubah energi listrik menjadi energi mekanik. Motor DC dipakai untuk
DC yang berfungsi sebagai driver, sebab sangat tidak mungkin mengendalikan
motor DC langsung dari mikrokontroler yang memiliki arus dan tegangan
terbatas. Dan pada sebuah motor DC memerlukan suplai tegangan yang searah
pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan
pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar
disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar
dalam pada medan magnet, maka akan timbul tegangan (GGL) yang
berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan
bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari
gelombang yang mempunyai nilai positif dengan menggunakan komutator dengan
demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam
medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan
yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.14 Motor DC
2.2.1 Pr insip Dasar Car a Ker ja Motor DC
Apabila terdapat sebuah arus lewat pada suatu konduktor dan
menimbulkan medan magnet di sekitar konduktor, maka motor tersebut akan
Gambar 2.15 Medan Magnet Yang Membawa Arus Mengelilingi Konduktor
Jika sebatang kawat terdapat diantara kutub U – S dengan garis – garis
gaya yang homogen sedangkan didalam kawat ini mengalir arus listrik yang
arahnya menjauhi, maka di sebelah kanan kawat garis gaya kutub magnet dan
garis gaya arus listrik sama arahnya dan di sebelah kiri kawat arahnya berlawanan
sehingga bentuk medan magnet akan berubah. Gambar motor DC ditunjukan pada
gambar 2.16 di bawah ini.
Gambar 2.16 Motor DC
2.2.2 Motor DC Ser vo
Motor DC (Direct Current) adalah peralatan elektromagnetik dasar yang
berfungsi untuk mengubah tenaga listrik menjadi tenaga mekanik yang desain
awalnya diperkenalkan oleh Michael faraday lebih dari seabad yang lalu (E.
Pitowarno, 2006). Motor DC dikendalikan dengan menentukan arah dan
kecepatan putarnya. Arah putaran motor DC adalah searah dengan arah putaran
jarum jam (Clock Wise/CW) atau berlawanan arah dengan arah putaran jarum jam
(Counter Clock Wise/CCW), yang bergantung dari hubungan kutub yang
yang diberikan. Dan suatu mesin listrik akan berfungsi sebagai motor listrik
apabila di dalamya terjadi proses konversi energi listrik menjadi energi mekanik (
Sularso, Dasar Perencanaan. Dan Pemilihan Elemen Mesin,1997 ).
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW)
dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan
memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya.
Jenis-jenis motor servo :
a. Motor Servo Standard 180o
Motor servo jenis ini hanya mampu bergerak dua arah(CW dan
CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total
defleksi sudut dari kanan–tengah–kiri adalah 180°.
b. Motor Servo Continous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW)
gambar.2.17. menjelaskan tentang diagram pengkabelan motor servo
tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
Gambar 2.17 Motor Servo Dan Diagram Pengkabelannya
Gambar 2.18 Pensinyalan Motor Servo
c. Motor servo akan bekerja secara baik jika pada bagia pin kntrolnya
diberikan sinyal PWM dengan frekuensi 50Hz.
d. Dimana pada saat sinyal dengan frekuensi 50Hz tersebut dicapai pada
kondisi Ton Duty Cycle 1.5ms, maka rotor dari motor akan berhenti tepat
e. Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5ms,
maka rotor akan berputar kearah kiri dengan membentuk sudut yang
besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan
diposisi tersebut.
f. Dan sebaliknya, jika Ton Duty cycle dari sinyal yang diberikan lebih dari
1.5ms, maka rotor akan berputar kearah kanan dengan membentuk sudut
yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi
tersebut.
Sedangkan motor bertugas melayani kebutuhan beban agar seluruh sistem
dapat beroprasi sesuai dengan rencana. Motor DC servo merupakan salah satu
jenis motor yang di gunakan dalam industri. Salah satu jenis motor DC servo
adalah motor DC servo magnet permanent. Kumparan yang terdapat dalam
konstruksi dari motor DC servo adalah stator dan rotor. Stator merupakan bagian
yang tetap artinya medan stator diperoleh dari magnet permanent. Sedangkan
bagian yang berputar dari motor yang terdiri atas armature dan sebuah koil yang
dialiri arus disebut rotor.
Prinsip kerja dari motor DC servo hampir sama dengan prinsip kerja
motor DC umumnya yaitu pada saat arus mengalir melalui kumparan maka akan
menimbulkan medan magnet ( medan magnet jangkar ) yang berlawanan dengan
medan yang dibangkitkan oleh magnet permanen sehingga menghasilkan torsi
pada rotor. Saat rotor berputar sikat dan komutator mengalirkan arus ke armature
sehinga sisa medan magnet melawan medan lainnya. Di bawah ini adalah gambar
Gambar 2.19 Kontruksi Motor DC Servo
Keterangan: A,C,E,F,K = Bearing
B,D,G,L = Shaft
Rangkaian ekivalen dari motor DC servo magnet permanen termasuk
motor DC penguat terpisah. Jika kecepatan motor bertambah maka tegangan
induksi akan naik, karena di pengaruhi oleh arus armature jika tegangan motor
dari supply dinyatakan dalam Vin dan resistansi armature dalam Ra maka arus
yang melalui armature adalah Vin/Ra.
Kecepatan putaran motor dapat dilakukan dengan cara mengatur besar
tegangan input (Vin) yang lebih kecil dari tegangan maksimalnya, maka
Perubahan putaran akan mempengaruhi besarnya torsi yang dihasilkan oleh motor
DC servo. Di bawah ini adalah grafik karakteristik motor DC yang ditunjukan
pada gambar 2.20 .
Gambar 2.20 Grafik Karakteristik Motor DC Servo
Motor DC servo mungkin juga digerakan oleh control penggerak
elektronik, yang seringkali dinamakan servo driver disebut kombinasi motor
pengerak. Servo driver mengatur gerakan motor DC servo dan beroperasi dalam
berbagai macam mode. Beberapa cirinya adalah penggerakan posisi titik ke titik
profil kecepatan dan percepatan yang dapat diprogram.
2.3 Sensor Ultr asonik
Sensor ultrasonik merupakan sensor pendeteksi halangan yang mana cara
kerjanya memancarkan bunyi yang tidak dapat didengar dengan frekuensi
Ultrasonic lalu suara tersebut dipantulkan oleh halangan sehingga reciever
Gambar 2.22 Prinsip Kerja Sensor Ultrasonic
Dengan menghitung waktu yang dipancarkan dengan waktu setelah
diterima maka jarak dapat diketahui. Dengan mengetahui jarak robot dapat
memperkirakan badan robot dengan dinding agar tidak menabrak halangan atau
dinding.dalam pembuatan sensor ultrasonic robot memerlukan sensor tersebut
sebanyak 6 buah agar semakin kecil kemungkinan untuk tidak menabarak dengan
dinding.
Gambar 2.23 Sensor Ultrasonik Ping Parallax
Ping ini adalah sebuah modul Ultrasonik, yang biasanya digunakan untuk
mendeteksi jarak yang didesain khusus untuk teknologi robotika. Dengan
ukurannya yang cukup kecil (2,1cm x 4,5cm), sensor ini dapat mengukur jarak
antara 3 cm sampai 300 cm Pada dasanya, Ping terdiri dari sebuah chip
ultrasonik. Speaker ultrasonik mengubah sinyal 40 KHz menjadi suara sementara
mikropon ultrasonik berfungsi untuk mendeteksi pantulan suaranya.
2.4 Sensor Uvtr on R2868 Hamamatsu
Uvtron merupakan sensor yang mendeteksi keberadaan sumber api
terhadap susunan cahaya yaitu berupa cahaya Ultraviolet yang disaringnya. Cara
kerja Uvtron adalah penggandaan metal photoelectric dan efek penggandaan gas.
Spektrum cahaya yang difilter yaitu 185 sampai 260 nm dalam spektrum tersebut
terdapat cahaya berupa ultraviolet. Tabung Uvtron membutuhkan tegangan kerja
sekitar 350 v sehingga tidak mungkin bila pada robot diberi sumber sebesar 350v.
Jadi tabung Uvtron membutuhkan driver agar tabung tersebut dapat bekerja
antara 24v sampai 5v .driver tersebut yaitu C7304 sebagai boardnya.
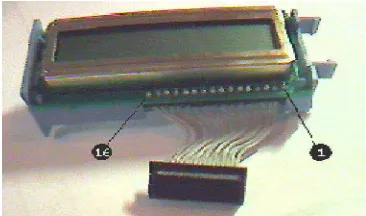
Gambar 2.23 Bentuk Fisik Tabung Uvtron Dengan Board
Pada gambar 2.23 adalah bentuk fisik tabung Uvtron yang telah dipasang
pada PCB driver Uvtron, karena fisik Uvtron tabung sehingga tidak memiliki
diperlukan agar posisi tabung Uvtron focus terhadap sumber cahaya.Dan untuk
kepekaan sensor Uvtron ini adalah mencapai jarak 4 samapai 5 meter berikut
adalah gambar 2.24 sudut kepekaan sensor uvtron :
Gambar 2.24 Sudut Kepekaan Terhadap Obyek
2.6 LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah modul penampil yang banyak
digunakan karena tampilannya menarik. LCD yang paling banyak digunakan saat
ini ialah LCD M1632 refurbish karena harganya cukup murah. LCD M1632
merupakan modul LCD dengan tampilan 2x16 (2 baris x 16 kolom) dengan
konsumsi daya rendah. LCD yang umum, ada yang panjangnya hingga 40
karakter (2x40 dan 4x40), dimana kita menggunakan DDRAM untuk mengatur
tempat penyimpanan karakter tersebut.
Pada LCD tersebut telah dilengkapi dengan mikrokontroler yang didesain
khusus untuk sebagai driver LCD. Di dalamnya telah terdapat beberapa memory
dan berbagai sarana penunjang lainnya, yaitu DDRAM (Display Data Random
Access Memory), CGRAM\ (Character Generator Random Access Memory), dan
CGROM (Character Generator Read Only Memory), BF (Busy Flag), Address
Counter (AC), dan berbagai register yang ada didalamnya, terlihat pada gambar
2.26.
Gambar 2.26 Blok Diagram LCD dan Driver
Gambar 2.27 berikut menampilkan hubungan antara LCD dengan port
mikrokontroler, biasa terdapat potensiometer untuk mengatur kontras/kecerahan
dari LCD tersebut. Pada input LED, dipasang transistor sebagai penguat arus,
Pada Bab ini membahas mengenai beberapa hal dasar tentang bagaimana
dalam pembuatan perancangan robot mulai komponen – komponen apa saja yang
dibutuhkan dalam perancangan robot ini, pembuatan Flowchart Robot, Blok
Diagram Hardware Robot dan Analisa setelah robot tersebut dibuat.
3.1 Per ancangan Robot
Dalam pembuatan robot ini penulis memperhatikan beberapa aspek yang
dibutuhkan, yaitu :
1. Robot ini dirancang untuk dapat berjalan secara otomatis dengan kemampuan
program yang telah diinputkan didalam robot tersebut serta robot dapat
mendekteksi cahaya yang terdapat suatu ruang.
2. Robot ini bergerak dalam sebuah jalur yang telah dibuat dan mencari sebuah
cahaya dalam sebuah ruang.
3. Robot ini dirancang dengan kemampuan hanya dapat bergerak dan memberi
peringatan apabila ada sebuah cahaya dalam suatu ruang.
4. Robot ini dirancang dengan menggunakan sensor UVTron R2868 sebagai
pendeteksi cahaya dengan Mikrokontroler AVR ATMega 16 dan
Mikrokontroler AVR ATMega 8 sebagai pengendali utama pada robot.
5. Robot ini menggunakan Motor DC 12 volt 185 rpm sebagai roda kanan dan
3.2 Flowchar t
Berdasarkan Algoritma yang telah di buat pada sub bab sebelumnya maka
selanjutnya di buat Flowchart dari robot pendeteksi ruang bercahaya
ultraviolet. Flowchart ini akan menunjukan arah dan tujuan terhadap
program yang dibuat untuk robot pendeteksi ruang bercahaya ultraviolet dan
akan memudahkan dalam pembuatan program pada bab berikutnya karena
alur program sudah ada dan siap di terapkan dalam code program, flowchart
juga berguna bagi pembaca untuk mengetahui alur dari program yang akan di
buat. Flowchart robot pendeteksi ruang bercahaya ultraviolet ada dua yaitu
flowchart sistem secara keseluruhan dan flowchart secara sistem pada
mikrokontroller adalah sebagai berikut:
Gambar 3.1 Flowchart Robot Pendeteksi Ruang Bercahaya Ultraviolet
Pada gambar 3.1 menjelaskan tentang flowchart robot pendeteksi ruang
bercahaya ultraviolet pada saat robot bergerak secara otomatis dengan semua
sensornya yang terdiri dari sensor dinding (sensor ping) dan Sensor cahaya
(sensor UVTron R2868), jadi pada saat pertama robot dihidupkan maka sensor
dinding dan sensor uvtron akan bekerja apabila terdapat penghalang atau dinding
maka robot akan mencari sebuah jalan yang tidak terdapat sebuah penghalang dan
ketika terdapat sebuah sumber cahaya maka sensor uvtron akan mencari sumber
cahaya yang terdapat pada ruangan dan langsung lampu LED warna merah yang
akan berkedip dan memberi sebuah warning ke LCD.
Gambar 3.2 Flowchart Robot Pendeteksi Ruang BercahayaUltraviolet Pada
Flowchart di atas merupakan rancangan sistem robot pendeteksi ruang
bercahaya ultraviolet yang ada pada mikrokontroler dan akan mempermudah
untuk membuat program karena di sini dapat terlihat jelas gambaran atau alur
sistem yang akan di buat nanti. Pada rancangan sistem ini di harapkan dengan
pembuatan flowchart sistem ini akan mempermudah pembuatan program pada
bab selanjutnya dan mempermudah para pembaca untuk mengetahui alur sistem
ini.
3.3 Blok diagr am
Gambar 3.3 Blok Diagram Robot Pendeteksi Ruang Bercahaya
Pada gambar 3.3 menjelaskan tentang perencanaan perangkat keras pada
proyek akhir ini menggunakan mikrokontroler AVR ATMega16 dan AVR
ATMega 8 sebagai sistem kontrol utama pada robot pendeteksi ruang bercahaya
ultraviolet. Dimana mikrokontroler AVR ATMega 8 yang berfungsi sebagai
mendeteksi terhadap suatu dinding atau penghalang yang ada, sedangkan
mikrokontroler AVR ATMega 16 berfungsi untuk memerintah uvtron untuk
mendeteksi cahaya yang terdapat pada dalam suatu ruangan. Mikrokontroller
AVR ATMega 16 Juga akan memerintah driver motor dan LCD untuk berjalan
mencari sumber cahaya dan memberi sebuah warning ke LCD apabila
ditemukannya sebuah cahaya.
3.4 Kebutuhan Per ancangan Har dwar e Robot
Dalam pembuatan robot ini komponen-komponen yang dibutuhkan adalah
sebagai berikut :
1. Sensor UVTron R2868
2. Dinamo DC
3. Transistor
4. Resistor
5. Bridge Sisir (Dioda Kuprok/Dioda Bridge)
15.Push Button dan LCD 2X16
3.5 Car a mer ancang Robot
Merancang robot bukanlah suatu hal yang mudah dan tidak dapat
dilakukan oleh banyak kalangan. Dalam menjalani Tugas Akhir ini penulis ingin
memaparkan bagaimana cara merancang robot ini.
Pertama, membeli semua komponen-komponen yang diperlukan dalam
pembuatan robot ini. Setelah membeli semua komponennya, kemudian mendesign
robotnya sesuai dengan keperluan dan kebutuhan user.
Kedua, setelah medesign robot, kemudian merakit komponen-komponen
yang sudah ada ke PCB (Printed Circuit Board). Setelah itu untuk menyatukan
rangkaian komponen dan motor diperlukan sebuah mika sebagai rangka dari robot
serta beberapa sensor yang perlu untuk mendeteksi sumber cahaya (cahaya
ultraviolet) yaitu sensor Uvtron R2868.
Ketiga, dalam menggerakan robot pendeteksi ruang bercahaya ultraviolet ini
menggunakan sebuah aki 12 volt 1,3 A digunakan untuk menjalankan motor Dc
dan komponen – komponen yang terdapat di PCB.
Keempat, untuk mengupload program ke robot maka di gunakan downloader
untuk mengirim program dari CPU ke mikrokontroler.
3.6 Analisis Per ancangan Motor DC
Motor DC merupakan salah satu bagian terpenting dalam merancang
sebuah robot penjelajah. Motor DC ini mempunyai peran yang sangat penting
robot tersebut maju ke depan maka kedua motor kanan dan kiri berputar bersama
ke arah depan dan jika robot tersebut belok kanan maka motor bagian kanan
berputar ke belakang dan motor bagian kiri berputar ke depan. Begitu pula
sebaliknya jika robot belok kiri maka motor bagian kiri berputar ke belakang dan
motor bagian kanan berputar ke depan. Serta jika robot itu mundur ke belakang,
maka motor kanan dan kiri berputar ke belakang.
Tabel 3.1 Rancangan Rangkaian Driver Motor
Motor Kanan Motor Kiri
Dalam membuat sebuah robot memperlukan rancangan dan analisis yang
mana rancangan tersebut digunakan untuk mengetahui tata letak perangkat –
perangkat yang akan digunakan pada robot dan berguna juga untuk merancang
seberapa besar atau ukuran robot yang akan dibuat agar berjalan dengan baik.
Berikut ini adalah cara kerja mekanik yang terdapat pada robot pendeteksi ruang
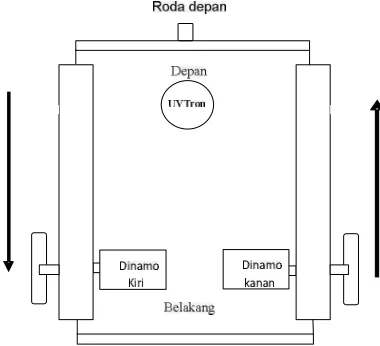
3.7.1 Rancangan Motor Saat Maju k e Depan
Posisi robot pada saat maju, dinamo kiri beputar ke arah kanan atau searah
jarum jam sedangkan untuk dinamo kanan berputar ke kiri atau berlawanan searah
jarum jam.
Gambar 3.4 Robot Saat Maju
3.7.2 Rancangan Motor Saat Belok ke Kanan
Posisi pada saat belok kanan, dinamo kiri dan dinamo kanan berputar ke
arah kanan atau searah jarum jam.
3.7.3 Rancangan Motor Saat Belok ke Kir i
Posisi pada belok kiri, dinamo kiri berputar ke arah kanan atau searah
jarum jam sedangkan untuk dinamo kanan berputar ke kiri.
Gambar 3.6 Robot Saat Berputar Ke Kiri
3.7.4 Rancangan Motor Saat Mundur
Posisi pada saat mundur, dinamo kiri berputar ke arah kanan atau searah
jarum jam sedangkan untuk dinamo kanan berputar ke kiri.
3.8 Rancangan pada Robot
Rancangan perangkat keras pada proyek akhir ini mempergunakan
mikrokontroler AVR ATMega16 dan ATMega8 sebagai sistem kontrol utama
pada robot pendeteksi ruang bercahaya ultraviolet. Sedangkan rangkaian driver
digunakan untuk menjalankan motor DC.
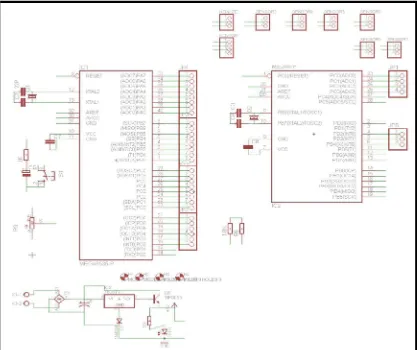
Gambar 3.8 Skematis PCB Pada Mikro
Pada gambar 3.7 di atas menjelaskan tentang arus rancangan pada komponen
– komponen PCB. Dimana sensor UVTron R2868 (sensor cahaya) sebagai
sebuah peringatan atau output ke LCD bahwa terdapat sebuah cahaya yang
terdeteksi.
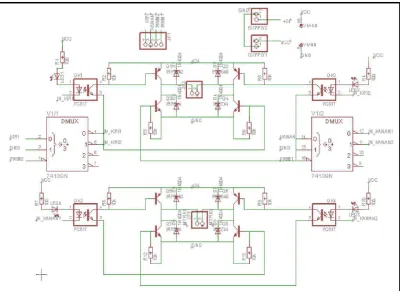
Gambar 3.9 Skematis PCB Pada Driver
Pada gambar 3.8 di atas menjelaskan tentang arus rancangan dan komponen
yang ada di PCB driver. Dimana PCB driver ini digunakan sebagai jalur
penggerak robot atau motor dari robot pendeteksi ruang bercahaya ultraviolet
dapat berjalan dengan baik dan motor DC sebagai komponen utama sebagai
penggerak robot pendeteksi ruang bercahaya ultraviolet saat mencari sebuah
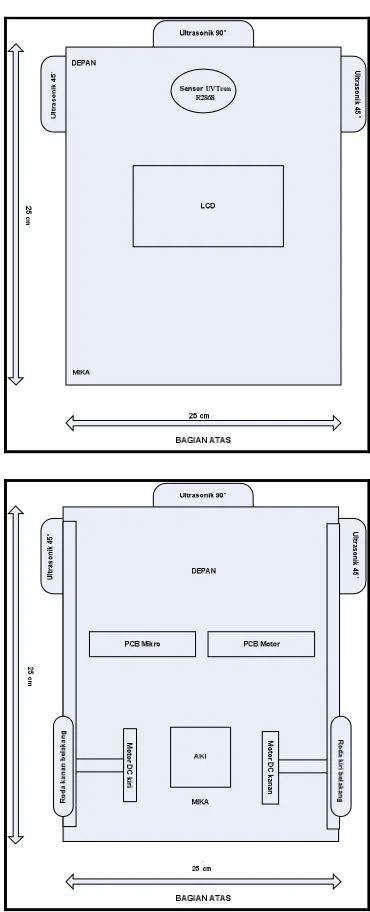
Gambar 3.10 Rancangan Robot Pendeteksi ruang bercahaya Ultraviolet
Pada gambar 3.9 menjelaskan tentang rancangan robot yang tampak pada
bagian atas robot, dan bagian bawah robot. Dimana rancangan robot ini
mempunyai panjang 25 cm dan lebar 25 cm. Robot juga memiliki 3 sebuah sensor
ultrasonik sebagai sensor dinding dan 1 sensor UVTron R2868 (sensor cahaya)
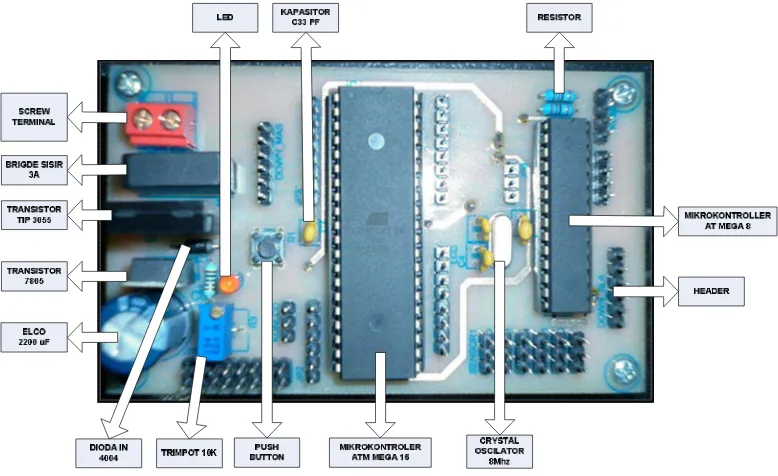
Gambar di bawah ini adalah rangkain PCB pada robot pendeteksi ruang
bercahaya ultraviolet yang menjelaskan bagian - bagian komponen PCB.
1. Mikrokontroler ATmega 16 dan ATmega 8
Mikrokontroler itu sendiri merupakan sebuah chip yang berfungsi sebagai
control utama pada robot pendeteksi ruang bercahaya ultraviolet.
2. Transistor
Transistor adalah komponen yang digunakan sebagai penguat arus pada robot
pendeteksi ruang bercahaya ultraviolet.
3. Resistor
Resistor adalah komponen yang digunakan sebagai penghambat arus ke
transistor robot pendeteksi ruang bercahaya ultraviolet.
4. Dioda
Dioda adalah komponen yang berfungsi penyearah arus yang terdapat pada
robot pendeteksi ruang bercahaya ultraviolet.
5. Elco adalah komponen yang digunakan sebagai penyimpan arus cadangan
yang ada pada robot pendeteksi ruang bercahaya ultraviolet.
6. LED
LED adalah lampu yang digunakan untuk petunjuk pada robot pendeteksi
ruang bercahaya ultraviolet.
7. Kapasitor C33 PF
Kapasitor C33 PF adalah suatu komponen yang memiliki peran penting yaitu
sebagai penyimpan arus listrik yang terdapat pada robot pendeteksi ruang
bercahaya ultraviolet.
8. Trimpot 10K
Trimpot merupakan suatu komponen elektronik yang berfungsi sebagai
keinginan atau kebutuhan pada robot pendeteksi ruang bercahaya ultraviolet
tersebut.
9. Crystal Oscilator
Crystal Oscilator 8Mhz suatu komponen pendukung mikrokontroler dan
fungsi cystal ini adalah sebagai clock bagi mikrokontroler.
10.Bridge Sisir(Dioda Kuprok/Dioda Bridge)
Bridge Sisir adalah sejenis komponen seperti dioda semi konduktor yang
berfungsi sebagai penyearah arus.
11.Push Button
Push Button Adalah saklar yang beroperasi dengan cara ditekan, berfungsi
untuk menutup dan membuka sirkuit atau on off bila ditekan.
12.Screw terminals
Screw terminals adalah penghubung antara komponen rangkaian yang ada
pada PCB.
13.Header
Header adalah suatu komponen konektor yang berfungsi sebagai penghubung
antara satu board ke board yang lain atau kmponen-komponen yang lain.
14.PC817
PC817 adalah komponen optocoupler yang mengontrol arus yang terdapat
pada robot pendeteksi ruang bercahaya dan sifatnya seperti komponen aktif.
Selain perangkat keras (hardware) dalam pembuatan robot pendeteksi
ruang bercahaya ini juga menggunakan sebuah perangkat lunak (software)
mikrokontroler yaitu CodeVision AVR C compiler dan AVRDude GUI v.13.
Gambar 3.13 CodeVision AVR dan AVRDude GUI v.13
3.9 Rancangan Pada Ar ena Robot.
Sesudah membuat rancangan robot maka selanjutnya adalah membuat
perancangan arena robot. Pada gambar 3.14 terdapat ruang 1, 2, dan 3 dimana
salah satu ruang tersebut berguna sebagai tempat sumber cahaya dan arena robot
ini memiliki tinggi 160 cm dan lebar 35 cm.
4.1 Kebutuhan Sistem
Ada beberapa hal dalam pengembangan sistem yang harus diperhatikan
sebelum akhirnya sampai pada langkah menjalankan program, antara lain
perangkat keras (hardware), perangkat lunak (software) serta bagaimana akhirnya
sistem dapat berjalan sesuai dengan program yang telah dibuat.
4.1.1 Per a ngkat Sistem
Perangkat yang dibutuhkan dam pembuatan robot pendeteksi ruang
bercahaya dengan menggunakan sensor ping (sensor dinding) dan sensor uvtron
(sensor cahaya) ini termasuk dalam pembuatan laporan adalah perangkat keras
(hardware) dan perangkat lunak (software).
Adapun perangkat keras yang digunakan dalam pengembangan sistem ini
adalah :
a. Komputer intel(R) core(TM)2 duo CPU
b. RAM 2Gb
c. Hard disk 200 Gb
d. Downloader
e. CD-ROM
Sedangkan perangkat lunak yang digunakan adalah :
a. Code Vision AVR
4.2 Pr osedur pemasangan
Ada beberapa cara yang harus dilakukan sebelum program dibuat dan
dimasukkan kedalam chips robot yaitu:
1. Instal terlebih dahulu aplikasi Code Vision AVR pada komputer.
2. Langkah selanjutnya adalah membuat file yaitu sebagai berikut:
File New
Gambar 4.1 Tampilan Awal Membuat File Baru
3. Kemudian muncul tab create new file. Pilih project dan klik ok
Gambar 4.2 Tampilan Create New File
4. Setelah muncul tab pemilihan penggunaan CodeWizardAVR untuk
pemprogamman lalu klik yes .
Gambar 4.3 Tampilan Konfirmasi Code Wizard AVR
Selanjutnya muncul tab CodeWizardAVR yang berisi tab-tab fasilitas atau
menu yang dimiliki setiap seri pada AVR seperti pada gambar 4.4.Pilih Chip
dengan IC yang Anda gunakan. Sebagai contoh memilih Chip Atmega16 dengan
crystal 8 MHz pada clock. Karena clock digunakan untuk menghitung delay agar
diperoleh perhitungan yang cukup akurat.
Gambar 4.4 Tampilan Tab Code Wizard AVR
5. Untuk menggunakan fungsi USART (Universal Synchronus Asynchronus
Gambar 4.5 Tampilan tab USART
Pada gambar 4.5 menjelaskan dengan mencentang Transmitter dan
Reciever maka fasilitas pengiriman data dan penerimaan data secara serial
diaktifkan. Dengan kondisi default yaitu Baudrate 9600 bps dan parameter
komunikasinya 8 Data, 1 Stop, No Parity
6. Selanjtunya untuk menggunakan fungsi LCD (Liquid Crystal Display) maka
akan muncul tab sebagai berikut :
Interface ke LCD membutuhkan 7 pin mikrokontroller. Missalnya
PORTC yang perlu digunakan maka konfigurasi pin antara LCD dengan
mikrokontroller yaitu seperti gambar 4.6.
7. Selanjutnya mensetting setiap kaki pin AVR klik Ports maka akan muncul
Tab sebagai berikut :
Gambar 4.7 Tampilan Setting PORT
8. Setelah menyetting sesuai kebutuhan selanjutnya adalah generate dan
9. Maka setelah generate dan file disimpan maka pada Project Navigator akan
muncul nama project beserta file C-nya. Secara bersamaan isi file C akan
dibuka pada jendela editor seperti ditunjukkan oleh Gambar 4.9.
Gambar 4.9 File C Pada Jendela Editor
9. Setelah menambahkan program maka click compile program dengan cara
memilih menu yang terdapat pada aplikasi CodeVisionAVR C Compiler
seperti gambar 4.10.
Gambar 4.11 Hasil Compile
10.Jika dalam tahap compiling tidak terjadi masalah maka tahap selanjutya
adalah proses download program yang telah kita buat ke dalam
mikrokotroller menggunakan software AVRDUDE GUI v.13.
Pada gambar 4.13 adalah proses download progam jika tidak ada
kesalahan dalam setting maupun perangkat mikrokontroler ataupun
downloader.
Gambar 4.13 Pesan Error Dalam Proses Download Program
Jika tidak muncul pesan error seperti di atas code ada di dalam
mikrokontroler sudah terjalin dengan baik.
4.3 Algor itma Wall Following.
Pengendalian motor DC bertujuan untuk menentukan seberapa cepat robot
memutar dan sebagainya. Yang terpenting dalam pengendalian motor DC disini
adalah bagaimana caranya robot tidak menabrak dinding ataupun halangan yang
ada disekitarnya cara yang dapat digunakan agar robot tidak menabrak dinding
kiri atau kanan yaitu dengan tetap menjaga jarak antara robot dengan dinding kiri
atau kanan pada nilai tertentu. Pada metoda ini robot menggunakan sensor jarak
kiri untuk mendeteksi jarak robot ke dinding kiri dan sensor jarak kanan untuk
mendeteksi jarak robot ke dinding kanan. Metoda yang dapat digunakan yaitu left
wall following (mengikuti dinding kiri) dan Right wall following (Mengikuti
dinding Kanan).
4.3.1 Left Wall Following
Diagram pengontrolan motor kanan pada metode left wall following
ditunjukkan pada gambar 4.14. Diagram pengontrolan untuk motor kiri adalah
sama dengan gambar 4.14 kecuali bahwa output Kpw dijumlahkan dengan Sd.
Gambar4.14 Diagram Blok Pengendalian Motor Kanan Pada Metode Left Wall Following
Dari gambar 4.14 diperoleh persamaan untuk duty cycle yang diberikan ke
Ket :
Sd : Kecepatan yang diinginkan
Dd : Jarak yang diinginkan antara robot dengan dinding
Kpw : Konstanta proporsional yang menyatakan seberapa cepat sistem
menanggapi error jarak
D : Jarak antara robot dengan dinding kiri
Kdc : konstanta duty cycle
Dari persamaan tersebut, pada saat D < Dd maka motor kiri akan
dipercepat dan motor kanan diperlambat sehingga motor akan menjauhi dinding
kiri sedangkan apabila D > Dd maka motor kiri akan diperlambat dan motor
kanan dipercepat sehingga robot berjalan mendekati dinding kiri. Setelah D = Dd
maka robot akan berjalan konstan dengan kecepatan Sd.
4.3.2 Right Wall Following
Diagram pengontrolan motor kanan dan kiri dan kiri pada metoda ini sama
dengan diagram pengontrolan pada metoda left wall following. Yang
membedakan adalah nilai D, disini D merupakan jarak robot terhadap dinding
kanan. Dari gambar tersebut diperoleh persamaan untuk mencari duty cycle untuk
robot terlalu ke kanan (D < Dd ) maka motor kanan akan dipercepat
sedangkan motor kiri diperlambat sehingga robot akan berjalan menjauhi dinding
kanan dan sebaliknya jika D > Dd maka motor kanan akan diperlambat sedangkan
motor kiri dipercepat sehingga robot akan berjalan mendekati dinding. Setelah D
= Dd maka robot akan berjalan lurus konstan dengan kecepatan Sd. Sedangkan
pengontrolan Motor DC terhadap dinding yang ada di depannya dilakukan dengan
cara mengecek jarak robot terhadap dinding depannya. selama jarak robot dengan
dinding depan masih dalam posisi aman maka kontrol motor menggunakan
metoda left wall following (mengikuti dinding kiri) dan Right wall following
(Mengikuti dinding Kanan). Dan apabila jarak berada pada jarak minimum maka
robot akan mengurangi besarnya Dutycycle yang diberikan pada motor atau
melakukan tindakan lain seperti berhenti, belok kanan atau kiri.
4.4 Implementasi coding
Pada tahapan ini akan dibahas mengenai implementasi program yang telah
dibuat untuk robot, dari perancangan robot yang telah dibahas sebelumnya.
Langkah pertama yang harus di lakukan dalam pembuatan program adalah
mendeklarasikan semua fungsi, dan semua port pada mikrokontroler yang
digunakan sebagai input dan output dari program yang akan disusun. Berikut
Setelah proses deklarasi port yang di tentukan ke dalam mikrokontroler
selesai, langkah kedua adalah membuat program untuk menjalankan sensor
ultrasonik dimana apabila sensor ultrasonik jauh dari dinding nilai maka bernilai
254. Berikut adalah potongan program untuk sensor ultrasonik yang digunakan
Apabila selesai membuat sebuah program untuk sensor ultrasonik maka
langkah ketiga adalah membuat program untuk sensor uvtron. Di bawah ini
Setelah membuat program untuk mendeteksi sumber cahaya maka
selanjutnya atau tahap keempat ada membuat program untuk jalannya robot saat
berjalan menuju sumber cahaya dan di bawah ini adalah potongan code untuk
robot saat berjalan.
4.5 Implementasi Robot
Pada tahapan ini akan dibahas mengenai implementasi sistem dari
perancangan robot yang telah dibahas sebelumnya.
Berikut adalah gambar komponen-komponen yang telah di rakit PCB pada
Gambar 4.15 Rangkaian PCB Mikro
Setelah merangkai komponen-komponen pada PCB, tahap implementasi
yang terakhir adalah menghubungkan rangkaian PCB dengan motor DC dan juga
mika berbentuk segi empat sebagai rangka dari robot itu sendiri. Maka dari itu
robot ini membutuhkan beberapa perangkat tambahan agar robot pendeteksi ruang
bercahaya ultraviolet dapat bergerak dan berjalan dengan baik. Perangkat
tambahan yang dibutuhkan antara lain aki, mika, motor DC, kabel dan roda.
Berikut ini adalah gambar robot pendeteksi ruang bercahaya ultraviolet yang telah
dirangkai dengan komponen-komponen yang sudah dipersiapkan.
Gambar 4.17 Robot Pendeteksi Ruang Bercahaya Ultaviolet Tampak Dari
Gambar 4.18 Robot Pendeteksi Ruang Bercahaya Ultaviolet Tampak Dari
Samping Kanan
Gambar 4.19 Robot Pendeteksi Ruang Bercahaya Ultaviolet
Gambar 4.20 Robot Pendeteksi Ruang Bercahaya Ultaviolet
Pada Bab Pengujian penulis akan menguji robot mulai pengujian driver
motor, pengujian sensor ultrasonik, pengujian sensor uvtron dan terakhir
pengujian robot pendeteksi ruang bercahaya ultraviolet Serta analisa dari
perangkat keras, perangkat lunak dan analisa dari pengujian.
5.1 Pengujian
Pada bagian pengujian akan dilakukan pengujian dari pengujian driver
motor, pengujian sensor ultrasonik dan juga pengujian sensor uvtron.
5.1.1 Pengujian Dr iver Motor
Untuk Pengujian driver motor yang berfungsi untuk menggerakkan robot.
Dan untuk melakukan pengujian terhadap motor driver ini penulis menyiapkan
sebuah aki yang mempunyai tegangan 12 volt jika kurang dari 12 volt makan
motor dc tidak akan bergerak karena supply tegangan yang kurang.
5.1.2 Pengujian Sensor Ultrasonik
Pada bahasan ini akan menguji sensor ultrasonik dengan 2 cara yaitu
manual dan menguji sensor ultrasonik pada robot dengan menggunakan arena.
A. Pengujian Sensor Ultrasonik Manual
Dalam pengujian sensor ultrasonik manual ini akan menguji sensor tanpa
robot yang berjalan dan hanya menguji sensor ultrasonik dengan penggaris atau
alat ukur dengan halangan tangan atau yang lainnya.
Gambar 5.2 Pengujian Sensor Ultrasonik Manual
Pada gambar diatas sensor ultrasonik diuji dengan cara manual dengan
menggunakan alat ukur berupa penggaris dan kardus sepatu sebagai penghalang.
B. Pengujian Ultr asonik Pada Robot Menggunakan Ar ena
Pada pengujian kali ini sensor ultrasonik diuji dengan menggunakan arena
yang telah dibuat.
Gambar 5.3 Pengujian Sensor Ultrasonik Pada Robot Menggunakan Arena
Pada gambar diatas menjelaskan bahwa sensor ultrasonik yang ada pada
robot pendeteksi ruang bercahaya ultraviolet diuji menggunakan arena dan
hasilnya robot berhasil menghindari dan tidak membentur halangan arena yang
ada dalam arena tersebut.
5.1.3 Pengujian Sensor Uvtr on
Pada pengujian sensor uvtron penulis akan menguji dengan 2 cara yaitu
menggunakan arena dan manual atau menggunakan penggaris sebagai pengukur