6
BAB II
LANDANSAN TEORI
Pada bab ini akan dijelaskan tentang beberapa teori yang berhubungan dengan pembuatan skripsi yang menjadi landasan teori dalam pembahasan berikutanya. Teori berisi definisi-definisi maupun alat-alat yang akan digunakan.
2.1. Sifat dasar fluida
Fluida atau zat cair (termasuk uap air dan gas) dibedakan dari benda padat karena kemampuannya untuk mengalir. Fluida lebih mudah mengalir karena ikatan molekul dalam fluida lebih kecil dari ikatan molekul dalam zat padat, akibatnya fluida mempunyai hambatan yang relative lebih kecil pada perubahan bentuk karena gesekan. Zat cair mengikuti bentuk wadahnya dan volumenya dapat diubah hanya jika diberikan gaya yang sangat besar. Untuk mengerti aliran fluida maka harus mengetahui beberapa sifat dasara fluida yang meliputi; kerapatan (density), berat jenis (specific gravity), tekanan (pressure), dan kekentalan (viscosity).
2.1.1 Kerapatan (density)
Kerapatan atau density dinyatakan dengan ρ (ρ adalah huruf kecil Yunanai yang dibaca “rho”), didefinisikan sebagai massa persatuan volume.
= [ ⋰ ] (2-1)
dimana, ρ= kerapatan (kg/m3) m= massa benda (kg) v= volume (m3)
Kerapatan adalah suatu sifat karakteristik untuk setiap bahan murni. Benda terususun atas bahan murni, misalnya emas murni, yang dapat memiliki berbagai ukuran ataupun massa, tetapi kerapatannya akan sama untuk semuanya.
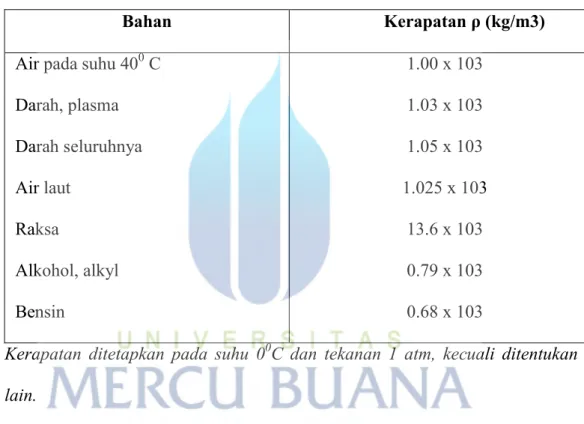
Satuan standard internasional (SI) untuk kerapatan adalah kg/m3. Untuk kerapatan berbagai bahan ditunjukkan pada table 2.1.
Tabel 2. 1 Berbagai Kerapat bahan
Bahan Kerapatan ρ (kg/m3)
Air pada suhu 400 C Darah, plasma Darah seluruhnya Air laut Raksa Alkohol, alkyl Bensin 1.00 х 103 1.03 х 103 1.05 х 103 1.025 х 103 13.6 х 103 0.79 х 103 0.68 х 103
Kerapatan ditetapkan pada suhu 00C dan tekanan 1 atm, kecuali ditentukan lain.
2.1.2 Berat jenis (specific gravity)
Berat jenis suatu bahan didefinisikan sebagai perabandingan kerapatan bahan terhadap kerapatan air. Berat jenis adalah besaran murni tanpa dimensi maupun satuan.
8 2.1.3 Tekanan (pressure)
Tekanan didefiniskan sebagai gya persatuan luas, dengna gaya F dianggap bekerja secara tegak lurus terhadap luas permukaan A, maka:
= (2-2)
dimana P = tekanan (kg/m2)
F = gaya (kg)
A= luas (m2)
Satuan tekanan dalam SI adalah N/m2 dan memiliki nama resmi Pascal (Pa), sebagai penghormatan kepad Blaise Pascal. 1 Pa= 1 N/m2. Konsep tekanan sangat berguna terutama dalam berurusan dengan fluida. Sebuah fakta eksperimental menunjukkan bahwa fluida menggunakan tekanan ke semua arah. Hal ini sangat dikenal oleh para perenang dan juga penyelam yang secara langsung merasakan tekanan air pada seluruh bagian tubuhnya. Pada titik tertentu dalam fluida diam, tekanan sama untuk semua arah. Ini diilustrasikan dalam II-1. Bayangkan fluida dalam sebuah kubus kecil sehingga kita dapat mengabaikan gaya gravitasi yang bekerja padanya. Tekanan pada suatu sisi harus sama dengan tekanan pada sisi yang berlawanan. Jika hal ini tidak benar, gaya netto yang bekerja pada kubus ini tidak akan sama dengan nol, dan kubus ini akan bergerak hingga tekanan yang bekerja menjadi sama.
Tekanan dalam cairan yang memilik kerapatan sama bervarisai terhadap kedalamannya. Sebagai ilutrasi dpat dilihat pada gambar 2.2, semakin dalam cairan maka semakin besar pula gaya tekannya ke segala arah.
Gambar 2. 2 Tekanan pada kedalam h dalam cairan
Tekanan yang terjadi di kedalam h ini disebabkan oleh berat kolom cairan di atasnya. Dengan demikian gaya yang bekerja pada luasan tersebut adalah F=mg= ρAhg, dengan Ah adalah volume kolom tersebut, ρ adalah kerapatan cairan (diasumsikan konstan), dan g adalah percepatan gravitasi. Kemudian P adalah
= [kg/m2
] (2-3)
= . . [kg/m2
] (2-4)
Dari persamaan diatas dapat disimpulkan bahwa tekanan berbanding lurus dengan kerapatan cairan dan kedalaman cairan tersebut. Secara umum, tekanan pada kedalaman yang sama dalam cairan yang seragam sama. Persamaa 2-4 berlaku untuk fluida yang kerapatannya konstan dan tidak berubah terhadap kedalaman. Dari persamaa 2-4 pulalah yang menjadi dasar dari penulisan tugas akhir ini, dimana semua perencanaan dan perancangan sistem pengukuran yang penulis tulis dalam tugas akhir ini memanfaatkan persamaan 2-4, dalam kasus ini penulis memanfaatkan persamaan 2-4 untuk mengukur dan memonitor volume tangki penyimpanaan produk serta mengendalikan proses yang sedang
10 2.2 Teori dasar PLC
Untuk membuat program PLC pertama-tama haruslah mempunyai latar belakang dalam pembuatan ladder diagram kontrol mesin. Alasanya adalah pada level dasar pemrogrman ladder untuk PLC adalah sama dengan ladder diagram electrical. Seorang engineer yang mengembangkan bahasa pemrograman PLC harus peka dengan kenyataan bahwa kebanyakan engineer, tehnisi, dan tukang listrik yang bekerja dengan mesin mesin listrik akan terbiasa dengan metode ini untuk merepresentasikan control logic. Ini mengharuskan seseorang pendatang baru di PLC untuk terbiasa dengan control diagram agar bisa dapat dengan cepat beradaptasi dengan bahasa pemrograman. Bahasa pemrograman PLC adalah salah satu bahasa pemrograman yang mudah untuk dipelajari. A. Physical Component Vs Program Component
Ketika belajar PLC programming salah satu konsep yang sulit adalah memahami perbedaan antara physical components dan program components. Kita akan menghubungkan (connecting) physical component (switches, lights, relays, etc) ke terminal luar pada PLC. Kemudian, pada program PLC, semua komponen yang terhubung dengan PLC akan direpresentasikan pada program sebagai Program Components. Program Component tidak sama dengan physical component tetapi hanya nama-nya saja yang boleh sama. Sebagai contoh switch pushbutton N/O S1 diberi nama START, jika kita connect switch ini ke input 001 PLC, maka ketika kita program PLC, switch START akan menjadi N/O relay contact dengan reference designator IN001 dengan nama START. Contoh lain jika kita connect RUN lamp L1 ke output 003 pada PLC, maka pada penulisan
PERIKSA STATUS MASUKAN EKSEKUSI PROGRAM UPDATE STATUS KELUARAN
program, lamp akan direpresentasikan dengan relay coil dengan reference designator OUT003 dengan nama RUN.
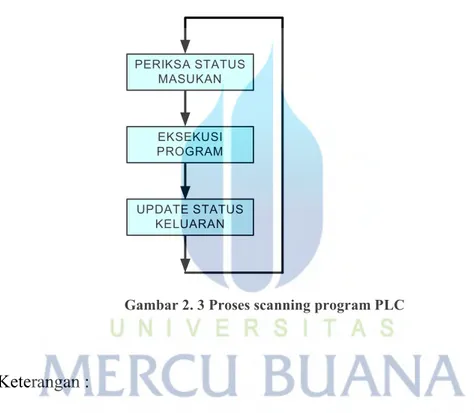
Sebuah PLC bekerja secara kontinyu dengan cara men-scan program. Ibaratnya kita bisa mengilustrasikan satu siklus scan ini menjadi 3 langkah atau 3 tahap. Umumnya lebih dari 3 tetapi secara garis besarnya ada 3 tahap sebagaimana ditunjukkan pada gambar dibawah.
Keterangan :
1. Periksa status masukan, pertama PLC akan melihat masing-masing status keluaran apakah kondisinya sedang ON atau OFF. Dengan kata lain, apakah sensor yang terhubungkan dengan masukan pertama ON ? Bagaimana dengan yang terhubungkan pada masukan kedua ? Demikian seterusnya, hasilnya disimpan ke dalam memori yang terkait dan akan digunakan pada langkah berikutnya.
12
program Anda (diagram tangga) per instruksi. Mungkin program Anda mengatakan bahwa masukan pertama statusnya ON maka keluaran pertama akan di-ON-kan. Karena PLC sudah tahu masukan yang mana saja yang ON dan OFF, dari langkah pertama dapat ditentukan apakah memang keluaran pertama harus di-ON-kan atau tidak (berdasarkan status masukan pertama). Kemudian akan menyimpan hasil eksekusi untuk digunakan kemudian.
3. Perbaharui status keluaran, akhirnya PLC akan memperbaharui atau mengupdate status keluaran. Pembaharuan keluaran ini bergantung pada masukan mana yang ON selama langkah 1 dan hasil dari eksekusi program di langkah 2. Jika masukan pertama statusnya ON, maka dari langkah 2, eksekusi program akan menghasilkan keluaran pertama, sehingga pada langkah 3 ini keluaran pertama akan diperbaharui menjadi ON.
Setelah langkah 3, PLC akan menghalangi lagi scanning program-nya dari langkah 1, demikian seterusnya. Waktu scan didefinisikan sebagai waktu yang dibutuhkan untuk mengerjakan tiga langkah tersebut. Masing- masing langkah bisa memiliki waktu tanggap (response time) yang berbeda-beda, waktu total tanggap atau total response time adalah jumlah semua waktu tanggap masing-masing langkah.
2.2.1 Dasar ladder diagram
Perancangan sistem kendali suatu mesin adalah suatu area dari kazanah ilmu terapan engineering dimana dibutuhkan pengetahuan khusus mengenai
teknik digram yang disebut ladder diagram. Meskipun ada kesamaan antara diagram kendali dan diagram elektronik, tetapi banyak symbol-simbol komponen dan layout yang berbeda.
2.2.1.1 Komponen-kompenen dasar dan simbolnya
Sebelum masuk lebih jauh tentang pemrograman menggunakan ladder diagram hal terpenting yang harus diketahui dan dimengerti alah mengenai symbol-simbol dari komponen. Adapun komponen-kompoenen beserta simbolnya di dalam ladder diagram akan dipaparkan dalam tulisan berikut ini:
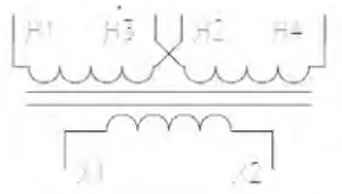
Control transformer
Untuk alas an keaman, kendali mesin menggunakan tegangan rendah. Karena switch, lampu dan komponen yang lain harus bersentuhan dengan operator atau petugas pemeliharaan maka dibuat peraturan untuk menggunakan tegangan tidak lebih dari 120 VAC. Untuk tujuan efisiensi, dan mengurangi pengkabelan, sebagian besar mesin disupply dengan tegangan tinggi (240VAC, 480VAC, atau lebih). Ini berarti tegangna yang digunakan untuk kendali harus dikurangi menjadi 120VAC atau kurang. Penurunan tegangan ini dilakukan dengan menggunakan transformer atau transformator.
14 Fuse/ sekering
Rangkaian kendali selalu terlindungi dengan fuse atau sekering. Fuse berfungsi untuk melindungi transformator dari hubung singkat yang terjadi di rangkaian kendali. Simbol untuk fuse dapat dilihat pada gambar 2.4.
Gambar 2. 5 Fuse atau sekering
Switch/saklar
Ada dua fungis dsar switch atau sakalar, yaitu switch atau saklar yang digunakan operator untuk mengirimkan instruksi atau perintah ke dalam rangkaian kendali. Yang kedua adalah switch atau saklar yang dipasang pada bagian-bagian yang bergerak dari mesin untuk memberikan umpan balik otomatis kepada rangkaian kendali. Tipe-tipe switch atau saklar adalah :
1. Push button
Adalah jenis switch atau saklar yang paling umum. Saklar push button aktif ketika tombol ditekan, dan nonaktif setelah tombol tidak ditekan lagi. Hal ini terjadi karena pegas di dalam push button yang menyebabkan tombol ke posisi semula (posisi nonaktif). Ada dua jenis kontak push button, yaitu kontak NO atau normally open dan kontak NC atau normally close. Yang dimaksud dengan posisi kontak NO adalah posisi dimana ketika push button tidak ditekan (dalam keadaan nonaktif) sambungan kontak terbuka (tidak mengalirkan arus. Sedangkan posisi kontak NC adalah posisi ketika push button tidak ditekan (dalam keadaan nonaktif) sambungan kontak sudah tertutup
dan mengalirkan arus listrik. Untuk memahami mengenai konsep NO dan NC dapat dilihat pada gambar 2.5.
Gambar 2. 6 Kontak NO dan NC
2. Push button switch actuator
Push button jenis ini adalah saklar push button dimana ketika ditekan posisinya tidak kembali ke posisi awal tetapi tetap pada posisi yang baru. Untuk mengembalikan ke posisi semula perlu untuk menekan tombol push button lagi. Sebagai gambarannya push button jenis ini memiliki fungsi seperti saklar lampu di rumah hanya saja bentuk dan aplikasinya yang berbeda. Di dalam penggunaannya, push button jenis ini juga dilenkapi dengan nyala lampu indikato, untuk mengindikasikan tombol dalam keadaan aktif atau tidak. Push button jenis ini disebut dengan lighted push button atau illuminated push button.
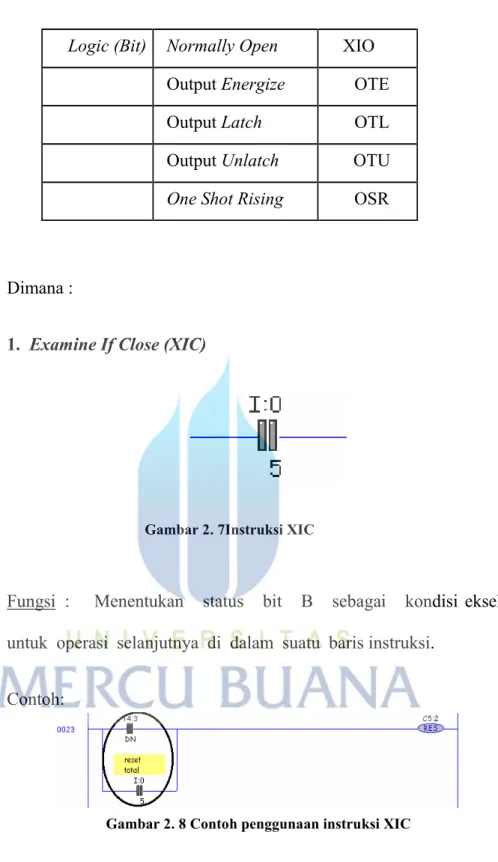
2.2.1.2 Dasar pemrograman ladder diagram Instruksi-instruksi pemrograman PLC tipe ini yakni :
Tabel 2. 2 Tipe-tipe relay logic (bit)
Type Nama Mnemonic
Relay Normally Close XIC
16
Logic (Bit) Normally Open XIO
Output Energize OTE
Output Latch OTL
Output Unlatch OTU
One Shot Rising OSR
Dimana :
1. Examine If Close (XIC)
Gambar 2. 7Instruksi XIC
Fungsi : Menentukan status bit B sebagai kondisi eksekusi untuk operasi selanjutnya di dalam suatu baris instruksi.
Contoh:
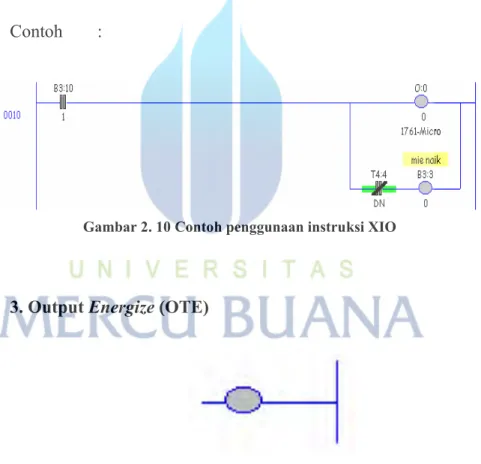
2. Examine If Open (XIO)
Gambar 2. 9 Instruksi XIO
Fungsi : Menentukan status dari invers bit B sebagai kondisi eksekusi untuk operasi selanjutnya di dalam suatu baris instruksi.
Contoh :
3. Output Energize (OTE)
Gambar 2. 11 Instruksi OTE
Fungsi : Status bit B ON untuk suatu kondisi eksekusi ON dan status bit B akan OFF untuk suatu kondisi eksekusi OFF.
18 Contoh :
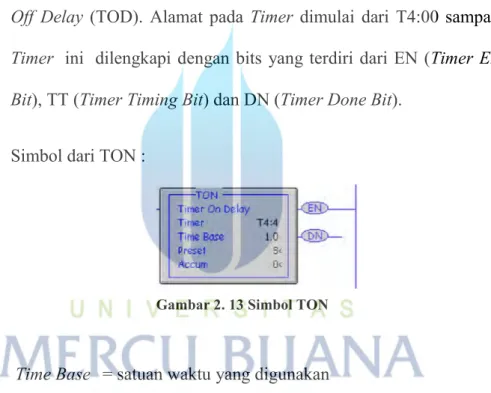
3. Pewaktu (Timer)
Timer pada jenis ini terdiri dari Timer On Delay (TON) dan Timer Off Delay (TOD). Alamat pada Timer dimulai dari T4:00 sampai 39. Timer ini dilengkapi dengan bits yang terdiri dari EN (Timer Enable Bit), TT (Timer Timing Bit) dan DN (Timer Done Bit).
Simbol dari TON :
Time Base = satuan waktu yang digunakan
Preset = waktu yang dibutuhkan untuk mengaktifkan DN setelah EN aktif
Accum = nilai timer, ketika Accum sama dengan Preset, DN aktif
Contoh :
Gambar 2. 12 Contoh penggunaan OTE
Gambar 2. 13 Simbol TON
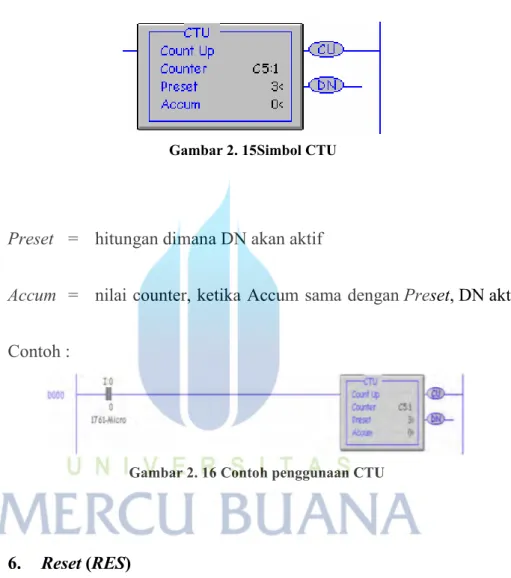
5. Pencacah (Counter)
Counter terdiri dari 2 bagian yakni CTU (Counter UP) dan CTD (Counter Down). Simbol dari CTU:
Preset = hitungan dimana DN akan aktif
Accum = nilai counter, ketika Accum sama dengan Preset, DN aktif
Contoh :
6. Reset (RES)
Digunakan untuk mereset nilai accum dari suatu counter hingga nilai menjadi nol (untuk CTU).
Contoh :
Gambar 2. 15Simbol CTU
20 7. Add (ADD)
Nilai pada source A ditambahkan dengan nilai pada source B dan disimpan pada Destination.
Contoh :
8. Move ( MOV )
Proccessor meng-copy nilai pada source ke alamat tujuan destination
Gambar 2. 18 Simbol ADD
Gambar 2. 19 Contoh Penggunaan ADD
Contoh :
9. Jump to Subroutine (JSR)
Jika kondisi pada rung untuk instruksi JSR adalah true, maka processor akan jump ke subroutine dengan nomor yang bersesuaian.
Contoh :
10. Subroutine (SBR)
Target dari subroutine diidentifikasi oleh nomor file yang dimasukkan dalam instruksi JSR.
Gambar 2. 21 Contoh penggunaan MOV
Gambar 2. 22 Simbol JSR
22 Contoh :
11. Return from Subroutine (RET)
Instruksi output ini menandakan akhir dari subroutine atau akhir dari eksekusi subroutine sehingga scanning dilanjutkan ke rung setelah rung yang memanggil subroutine ini.
Contoh :
Gambar 2.25 : Sim
2.3 PLC Allen Bradley
Programmable Logic Controler (PLC) Allen Bradley merupakan salah satu jenis PLC yang banyak digunakan untuk keperluan otomasi di industri. Ada 2 macam bentuk PLC Allen Bradley yaitu bentuk compact dan bentuk modular. Untuk bentuk compact, PLC ini menggunakan system rak (CPU dan I/O jadi satu kesatuan) dengan kapasitas memori yang terbatas.
Gambar 2. 24 Simbol SBR
Sedangkan untuk PLC bentuk modular terdiri dari modul CPU dan modul I/O (merupakan bagian yang terpisah-pisah).
2.3.1 Modul PLC Allen Bradley Bentuk Modular
Didalam 1 backplane ada yang bisa untuk 4, 7, 10, dan 13 modul. Pemilihan backplane disesuaikan dengan kebutuhan, semakin komplek system yang dibuat maka semakin banyak backplane yang digunakan. Apabila modul yang dibutuhkan lebih dari 13, maka harus menggunakan tambahan backplane karena tiap backplane maksimal untuk 13 modul saja.
Gambar 2. 26 Bentuk PLC kompak
24 2.3.2 Processor SLC500
Kecerdasan PLC ditentukan oleh tipe prosesor (mikroprosesor) yang digunakan. Prosesor bertugas untuk memerintah dan mengontrol kegiatan-kegiatan di seluruh sistem. Prosesor tipe SLC 5/05(1747-L552C 5/05 CPU - 32K Mem) mempunyai kapasitas maksimum 28,672 instruction words.
2.3.3 Analog input (1746-N14)
Modul analog input ini terdiri dari 4 channel, input tiap channel dapat berupa tegangan dc maupun arus dc. Untuk merubah input tegangan atau arus digunakan dip switch yang letaknya berada pada sisi modul. Pada modul tipe ini range tegangannya +/- 10 V sedangkan range arus +/- 20 mA.
2.3.4 Analog output (1746-NO41)
Seperti modul analog input, modul ini juga terdiri dari 4 channel namun output tiap channelnya hanya berupa arus dc dengan range 4mA – 21mA.
2.3.5 Digital Input (746-IB16)
Modul digital input mempunyai 16 terminal. Inputnya berupa tegangan dc dengan range 10-30 V.
2.3.6 Digital Output (1746-OW16)
Modul digital output mempunyai 2 channel dengan 8 terminal output tiap channelnya. Outputnya dapat berupa tegangan dc dengan range 5-125 V atau
berupa tegangan ac dengan range 5-265 V.
2.4 RS Logix 500
RSLogic merupakan software yang digunakan untuk membuat program didalam PLC. Adapun cara-cara yang harus dilakukan untuk membuat suatu program ladder diagram dengan menggunakan software ini adalah sebagai berikut :
1. Dari Start Menu Program pilih Program Files → Rockwell Software → RS Logix 5000 English → RS Logix 500 English. 2. Pada layar monitor akan muncul logo RS Logix 500 English untuk beberapa saat saja.
3. Apabila kita ingin membuat suatu program ladder diagram yang baru maka pilihlah icon New sedangkan apabila kita ingin membuka sebuah file program ladder diagram yang telah kita buat sebelumnya maka pilihlah icon Open a File dan pilih nama file-nya.
4. Setelah itu akan muncul sebuah layar gambar yang digunakan untuk menggambar ataupun mengedit program ladder diagram yang telah kita buat sebelumnya.
5. Untuk meng-on-line-kan program ladder yang telah kita buat kedalam PLC Allen Bradley maka pilih icon ↓ disamping kata OFFLINE yang terletak di pojok sebelah kiri atas bidang gambar dan pilihlah Download. Apabila seluruh penulisan program ladder diagram yang telah kita buat adalah benar maka tidak akan muncul pesan kesalahan
26
Kemudian apabila muncul perintah “Do you want to go Online ?” pada layar monitor maka pilihlah OK untuk meng-on-line-kan program ladder diagram tersebut kedalam PLC Allen Bradley dan apabila kita tidak ingin meng-on-line-kan program tersebut maka klik Cancel.
2.5 Sensor dan transducer
D Sharon, dkk (1982), mengatakan sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejala-gejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti energi listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya. Contoh; Camera sebagai sensor penglihatan, telinga sebagai sensor pendengaran, kulit sebagai sensor peraba, LDR (light dependent resistance) sebagai sensor cahaya, dan lainnya.
William D.C, (1993), mengatakan transduser adalah sebuah alat yang bila digerakan oleh suatu energi di dalam sebuah sistem transmisi, akan menyalurkan energi tersebut dalam bentuk yang sama atau dalam bentuk yangberlainan ke system transmisi berikutnya”. Transmisi energi ini bisa berupa listrik, mekanik, kimia, optic (radiasi) atau thermal (panas). Contoh; generator adalah transduser yang merubah energi mekanik menjadi energy listrik, motor adalah transduser yang merubah energi listrik menjadi energi mekanik, dan sebagainya.
William D.C, (1993), mengatakan alat ukura dalah sesuatu alat yang berfungsi memberikan batasan nilai atau harga tertentu dari gejala-gejala atau sinyal yang berasal dari perubahan suatu energi. Contoh: voltmeter, ampermeter
untuk sinyal listrik; tachometer, speedometer untuk kecepatan gerak mekanik, lux-meter untuk intensitas cahaya, dan sebagainya.
2.5.1 Persyaratan umum sensor dan tranduser
Dalam memilih peralatan sensor dan transduser yang tepat dan sesuai dengan sistem yang akan disensor maka perlu diperhatikan persyaratan umum sensor berikut ini : (D Sharon, dkk, 1982)
a. Linearitas
Ada banyak sensor yang menghasilkansinyal keluaranyang berubah secara kontinyu sebagai tanggapan terhadap masukan yang berubah secara kontinyu. Sebagai contoh, sebuah sensorpanas dapat menghasilkan tegangan sesuai dengan panas yang dirasakannya. Dalam kasus seperti ini, biasanya dapat diketahui secara tepat bagaimana perubahan keluaran dibandingkan dengan masukannya berupa sebuah grafik. Gambar 2.30 memperlihatkan hubungan dari dua buah sensor panas yangberbeda. Garis lurus pada gambar 2.30(a). memperlihatkan tanggapan linier, sedangkan pada gambar 1.1(b). adalah tanggapan non-linier.
28 b. Sensitivitas
Sensitivitas akan menunjukan seberapajauh kepekaan sensor terhadap kuantitas yang diukur. Sensitivitas sering juga dinyatakan dengan bilangan yang menunjukan “perubahan keluaran dibandingkan unit perubahan masukan”. Beberepa sensor panas dapat memiliki kepekaan yang dinyatakan dengan “satu volt per derajat”, yang berarti perubahan satu derajat pada masukan akan menghasilkan perubahan satu volt pada keluarannya. Sensor panas lainnya dapat saja memiliki kepekaan “dua volt per derajat”, yang berarti memiliki kepakaan dua kali dari sensor yang pertama. Linieritas sensor juga mempengaruhi sensitivitas dari sensor. Apabila tanggapannya linier, maka sensitivitasnya juga akan sama untuk jangkauan pengukuran keseluruhan. Sensor dengan tanggapan paga gambar 1.1(b) akan lebih peka pada temperatur yang tinggi dari pada temperatur yang rendah.
c. Tanggapan Waktu
Tanggapan waktu pada sensor menunjukan seberapa cepat tanggapannya terhadap perubahan masukan. Sebagai contoh, instrumen dengan tanggapan frekuensi yang jelek adalah sebuah termometer merkuri. Masukannya adalah temperatur dan keluarannya adalah posisi merkuri. Misalkan perubahan temperatur terjadi sedikit demi sedikit dan kontinyu terhadap waktu, seperti tampak pada gambar 1.2(a). Frekuensi adalah jumlah siklus dalam satu detik dan diberikan dalam satuan hertz (Hz). { 1 hertz berarti 1 siklus per detik, 1 kilohertz berarti 1000 siklus per detik]. Pada frekuensi rendah, yaitu pada saat
temperatur berubah secara lambat, termometer akan mengikuti perubahan tersebut dengan “setia”. Tetapi apabila perubahan temperatur sangat cepat lihat gambar 1.2(b) maka tidak diharapkan akan melihat perubahan besar pada termometer merkuri, karena ia bersifat lamban dan hanya akan menunjukan temperatur rata-rata.
Gambar 2. 29 Perubahan pembacaan secara kontinyu
Ada bermacam cara untuk menyatakan tanggapan frekuensi sebuah sensor. Misalnya “satu milivolt pada 500 hertz”. Tanggapan frekuensi dapat pula dinyatakan dengan “decibel(db)”, yaitu untuk membandingkan daya keluaran pada frekuensi tertentu dengan daya keluaran pada frekuensi referensi.
Yayan I.B, (1998), mengatakan ketentuan lain yang perlu diperhatikan dalam memilih sensor yang tepat adalahdengan mengajukan beberapa pertanyaan berikut ini:
1. Ukuran fisik sensor, apakah sesuai dengan tempat sensor itu dipasang atau tidak secara dimensi.
2. Akurasi sensor dalam mendeteksi perubahan.
30
4. Pengaruhnya terhadap media yang sedang diukur. Misal sensor ultrasonic yang digunakan untuk mengukur level atau ketinggian tentu tidak cocok digunakan untuk tangki yang digunakan untuk fermentasi karena akan berpengaruh pada kualitas produk.
5. Ketahanan sensor terhadap kondisi lingkungan kerja. 6. Yang terakhir dan tidak kalah penting adalah faktor biaya.
2.5.2 Jenis Sensor dan Tranduser
Perkembangan sensor dan transduser sangat cepat sesuai kemajuan teknologi otomasi, semakin komplek suatu sistem otomasi dibangun maka semakin banyak jenis sensor yang digunakan. Robotik adalah sebagai contoh penerapan sistem otomasi yang kompleks, disini sensor yang digunakan dapat dikatagorikan menjadi dua jenis sensor yaitu: (D Sharon, dkk, 1982)
a. Internal sensor, yaitu sensor yang dipasang di dalam bodi robot/ mesin. Sensor internal diperlukan untuk mengamati posisi, kecepatan, dan akselerasi berbagai sambungan mekanik pada robot, dan merupakan bagian dari mekanisme servo.
b. External sensor, yaitu sensor yang dipasang diluar mesin. Sensor eksternal diperlukan karena dua macam alasan yaitu: 1) Untuk keamanan dan
2) Untuk penuntun.
Yang dimaksud untuk keamanan” adalah termasuk keamanan robot, yaitu perlindungan terhadap robot dari kerusakan yang ditimbulkannya sendiri,
serta keamanan untuk peralatan, komponen,dan orang-orang dilingkungan dimana robot tersebut digunakan.
Sesuai dengan fungsi sensor sebagai pendeteksi sinyal dan meng-informasikan sinyal tersebut ke sistem berikutnya, maka peranan dan fungsi sensor akan dilanjutkan oleh transduser. Karena keterkaitan antara sensor dan transduser begitu erat maka pemilihan transduser yang tepat dan sesuai juga perlu diperhatikan.
2.5.3 Klasifikasi Sensor
Secara umum berdasarkan fungsi dan penggunaannya sensor dapatdikelompokan menjadi 3 bagian yaitu:
a. sensor thermal (panas) b. sensor mekanis
c. sensor optik (cahaya)
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala perubahan panas/temperature/suhu pada suatu dimensi benda atau dimensi ruang tertentu. Contohnya; bimetal, termistor, termokopel, RTD, photo transistor, photo dioda, photo multiplier, photovoltaik, infrared pyrometer, hygrometer,dsb.
Sensor mekanis adalah sensor yang mendeteksi perubahan gerak mekanis, seperti perpindahan atau pergeseran atau posisi, gerak lurus dan melingkar, tekanan, aliran, level dsb. Contoh; strain gage, linear variable deferential transformer (LVDT), proximity, potensiometer, load cell, bourdon tube, dsb.
Sensor optic atau cahaya adalah sensoryang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengernai benda
32
atau ruangan. Contoh; photo cell, photo transistor, photo diode, photo voltaic, photo multiplier,pyrometer optic,dsb.
2.5.4 Klasifikasi Tranduser
2.5.4.1 Self generating transduser(transduser pembangkit sendiri) Self generating transduseradalah transduser yang hanya memerlukan satu sumber energi. Contoh: piezo electric, termocouple, photovoltatic, termistor, dsb. Ciri transduser ini adalah dihasilkannya suatu energi listrik dari transduser secara langsung. Dalam hal ini transduser berperan sebagai sumber tegangan.
2.5.4.2 External power transduser(transduser daya dari luar)
External power transduser adalah transduser yang memerlukan sejumlah energi dari luar untuk menghasilkan suatu keluaran. Contoh: RTD (resistance thermal detector), Starin gauge, LVDT (linier variable differential transformer), Potensiometer, NTC, dsb)
2.6 Pressure Transducer Cerabar S PMC71
Sensor tekanan buatan Endress Hauser untuk tipe ini memanfaatkan rangkaian jembatan wheatstone dengan menggunakan silicon strain gauge sebagai resistor dan metallic process membrane dalam mengindra perubahan tekanan.
Gambar 2. 30 Konstruksi pressure transmiter
Gambar 2. 31 Prinsip kerja pressure transmiter
Cerabar merupakan resistif pressure transmiter. Resistansi yang dihasilkan oleh rangkaian jembatan wheatstone akan diolah oleh bagian kendali
34 2.7 Kabel Ethernet
Kabel data Ethernet terdiri dari 4 pasang kawat. Masing-masing mempunyai warna tertentu (solid) dengan pasangannya berwarnah putih bergaris-garis warna tertentu (solid), dipilin menjadi satu. Untuk performansi Ethernet yang baik, jangan membuka pilinan terlalu panjang (kira-kira ¼ inch).
2.7.1 Kode warna pada pasangan kabel Pair 1 : putih-biru/biru (white-blue/blue)
Pair 2 : putih-orange/orange (white-orange/orange) Pair 3 : putih-hijau/hijau (white-green/green) Pair 4 : putih-coklat/coklat (white-brown/brown)
Desain untuk 10BaseT Ethernet adalah warna orange dan hijau. Dua pasang lainnya, coklat dan biru, tidak digunakan. Berikut konfigurasi kabel
menggunakan RJ-45:
Gambar 2. 32 Kabel ethernet RJ45
Terdapat dua standard untuk kabel Ethernet ini, yaitu T-568A dan T-568B. Gambar di atas memperlihatkan kedua standard tersebut. Standard T-568B,
pasangan orange dan hijau diletakkan pada pin 1, 2 dan 3, 6. Standard T-568A membalikkan koneksi orange dan hijau, sehingga pasangan biru dan orange menjadi 4 pin yang berada di tengah, yang mebuat koneksi seperti ini lebih cocok untuk koneksi telco voice. T-568A telah dijadikan sebagai standard instalasi, sedangkan T-568B hanya sebagai alternative saja.
2.7.2 Nomor Pin
Berikut nomor pin untuk kedua standard di atas:
1. T-568A
Tabel 2. 3 Standard konfigurasi RJ45 T-568A Pin Color Pair Description
1 white/green 3 RecvData + 2 Green 3 RecvData - 3 white/orange 2 TxData + 4 Blue 1 Unused 5 white/blue 1 Unused 6 orange 2 TxData - 7 white/brown 4 Unused
36 2. T-568B
Tabel 2. 4 Standard konfigurasi RJ45 T-568B Pin Color Pair Descrtipion
1 white/orange 2 TxData + 2 Orange 2 TxData - 3 white/green 3 RecvData + 4 Blue 1 Unused 5 white/blue 1 Unused 6 Green 3 RecvData - 7 white/brown 4 Unused 8 Brown 4 Unused
2.7.3 Cross-over Cable (Kabel Silang) Ethernet
Kabel Ethernet/LAN mempunyai 8 buah kawat (4 pair). Untuk kebutuhan koneksi yang menggunakan Kabel Silang, Ethernet membutuhkan 2 pasang kawat, satu pasang berfungsi sebagai transmiter dan satu pasang lagi berfungsi sebagai receiver. Berikut konfigurasi Kabel Silang menggunakan konektor RJ-45:
Gambar 2. 33 Kabel ethernet cross over
Konfigurasi Pin:
Pin 1 - Pin 3 Pin 2 - Pin 6
Koneksi seperti ini digunakan untuk menghubungkan :
1. Hub ke Hub. 2. Switch ke switch 3. Komputer ke komputer
4. Port Ethernet Router ke port Ethernte Router 5. Komputer ke Router
38
Gambar 2. 34 Koneksi cross over
Catatan : Koneksi antar Hub atau Switch dapat menggunakan kabel straight dengan memasang pada port uplink. Pada beberapa tipe Hub, terdapat tombol kecil yang dapat berfungsi menjadikan port sebagai UPLINK.
2.7.4 Kabel Straight-Through
Konfigurasi kabel “straight-through” untuk Ethernet adalah, pin 1 pada konektor terhubung dengan pin 1 pada ujung konektor lawan, begitu seterusnya untuk pin 2 sampai 8.
Koneksi kabel Straight-through digunakan untuk menghubungkan : 1. Antara Komputer ke Hub