Diajukan untuk memenuhi salah satu syarat
memperoleh gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi Universitas Sanata Dharma
disusun oleh:
PRADU MAS WIBOWO
NIM: 045114058
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2009
MULTI VARIABEL PID CONTROLER FOR
HEATER MODELING
In partial fulfilment of the requirements
for the degree of Sarjana Teknik
Electrical Engineering Study Program
Electrical Engineering Departement
Science and Technology Faculty Sanata Dharma University
PRADU MAS WIBOWO
NIM : 045114058
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2009
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 06 April 2009
Penulis,
Pradu mas wibowo
1.Mazmur Daud. TUHAN adalah gembalaku, takkan kekurangan aku. 2 Ia membaringkan aku di padang yang berumput hijau,
Ia membimbing aku ke air yang tenang ; 3 Ia menyegarkan jiwaku.
Ia menuntun aku di jalan yang benar oleh karena nama-Nya. 4 Sekalipun aku berjalan dalam lembah kekelaman,
aku tidak takut bahaya, sebab Engkau besertaku;
gada-Mu dan tongkat-Mu, itulah yang menghibur aku.
5 Engkau menyediakan hidangan bagiku, di hadapan lawanku; Engkau mengurapi kepalaku dengan minyak; pialaku penuh melimpah. 6 Kebajikan dan kemurahan belaka akan mengikuti aku, seumur
hidupku; dan aku akan diam dalam rumah TUHAN sepanjang masa. Mazmur: 23
Impossible is nothing
HALAMAN PERSEMBAHAN Kupersembahkan Karya ini Kepada :
Bapa Putra Dan Roh Kudus, Teman sekaligus Ayah ku Yang sudah memberikan segalanya bagi ku, Tuhan Yesus
Kedua orang tua ku Mama dan Papa
Yang selalu Mendoakan aku Dan Memebrikan Dukungan Moral dan Sepiritual
Kedua Adik – adik ku Neneng dan Rini yang Paling aku Sayangi Dan
Seseorang Yang Telah Mengisi Hati ku,istriku Mei Li Dan anak ku james
output sehingga dibutuhkan sistem pengendalian yang handal. Kontrol PID (Proportional-Integral-Derivative) merupakan salah satu metode pengendalian yang sering digunakan dalam sistem kendali. Penelitian ini bertujuan untuk memperkecil gangguan unjuk kerja kontrol PID multivariabel dengan sistem decoupler. Pada penelitian ini kontrol PID digunakan untuk mengendalikan pompa air dan heater air.
Perancangan kontrol PID menggunakan metode kurva reaksi dan kontroler disusun secara paralel. Kontrol PID dibuat dengan basis algoritma PID digital dengan menggunakan pemrograman bahasa C. Unjuk kerja kontroler ini dibandingkan berdasarkan pada tiga parameter yaitu: waktu tunda, waktu naik, steady state error.
Hasil dari penelitian ini merupakan output kontrol PID yang stabil dan waktu penanganan gangguan kontrol PID yang lebih cepat saat kontrol diberi gangguan yang berasal dari luar sistem. Kontrol PID dengan decoupler memiliki waktu perbaikan yang lebih cepat saat sistem diberi gangguan dari luar dengan SSE <5% pada pemodelan
heater. Kontrol PID tanpa decoupler memiliki waktu perbaikan yang lebih lama saat sistem diberi gangguan dari luar dengan SSE <5% pada pemodelan heater
Kata kunci : PID digital,multivariabel , sistem decoupler
Mostly control in respective industry with the process not only control just one variable, but combination from some variable of input and output so that required a reliable operation system. PID (Proportional-Integral-Derivative) control is one of controlling methods that is usually used in control system. This research has a purpose to minimize the trouble of multivariabel PID control used decoupler system for this research is used to control the pump and heater.
PID control design which uses curve reaction method and controller are arranged in parallel form. PID control is made based on PID digital algorithm use C langguage programming. The performance of these controllers are compared based on three parameters : delay time, rise time steady state error.
The result of this research represent the stabel output of PID control and faster handling time , when control given disturban from out of system heater modeling. PID control use decoupler has shorter delay and rise time when control given disturban from out of system heater modeling with SSE < 5%. PID control which is unused decoupler system has longer delay and rise time when control given disturban from out of system heater modeling with SSE < 5% .
Keyword : Digital PID,multivariabel, decoupler system
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul :
KENDALI PID UNTUK MENGATUR LEBIH DARI
SATU VARIABEL PADA PEMODELAN HEATER
Beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan mempublikasikannya di Internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalty kepada saya selama tetap mencantumkan nama saya sebagai penulis.Demikian pernyataan ini saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 06 April 2009
Yang menyatakan
( Pradu Mas Wibowo )
KATA PENGANTAR
Puji dan syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa yang telah
melimpahkan rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan tugas akhir
berjudul “Kendali PID untuk mengatur lebih dari satu variabel input output pada
pemodelan heater (Multivariabel PID Controler for Heater Modeling)”.
Tugas akhir ini merupakan salah satu syarat untuk memperoleh gelar Sarjana
Teknik pada Jurusan Teknik Elektro Universitas Sanata Dharma Yogyakarta. Penulisan
tugas akhir ini didasarkan pada hasil - hasil yang penulis dapatkan selama proses
perancangan, pembuatan, pengujian dan pengamatan alat.
penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada:
1. Ibu Wuri Harini, S.T., M.T., selaku Pembimbing I yang telah membimbing penulis.
2. Bapak Martanto, S.T., M.T.sebagai pembimbing akademik penulis dan Bapak
Ir.Tjendro yang telah banyak memotivasi penulis .
3. Bapak Pius Yozy Merucahyo, S.T., M.T. dan Bapak Petrus Setyo Prabowo, S.T.
sebagai penguji saat ujian kolokium, Bapak Djoko Untoro Suwarno,S.Si.,M.T yang
telah memberikan banyak masukan pada proposal tugas akhir penulis.
4. Bapak dan ibu dosen, Bapak laboran dan teman – teman angkatan 2004 teknik
elektro.
5. Bapak Aris Sukardjito dan seluruh karyawan/wati Sekretariat Fakultas Teknik
Penulis sangat mengharapkan kritik dan saran yang dapat menyempurnakan tulisan.
Semoga tulisan ini dapat memberi manfaat bagi pembaca.
Yogyakarat 06 April 2009
Halaman judul dalam bahasa Indonesia... ... i
Halaman judul dalam bahasa Inggris... ii
Lembar pengesahan oleh pembimbing... iii
Lembar pengesahan oleh penguji... iv
Lembar pernaytaan keaslian karya... v
Halaman Persembahan dan moto hidup... vi
INTISARI... vii
ABSTRACT... viii
PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH……….. ix
KATA PENGANTAR... iix
DAFTAR ISI... ... iiix
BAB I : PENDAHULUAN... 1
1.1. Judul... 1
1.2. Latar belakang... 1
1.3. Tujuan dan Manfaat... 2
1.4. Batasan masalah... 2
1.5. Metodologi penelitian... 3
1.6. Sistem penulisan ... 3
BAB II: DASAR TEORI... 5
2.1Komponen sensor suhu dan sensor level………. 6
2.2 Penguat Beda dan Penguat Inverting [4]………. 7
2.2.1 Rangkaian Penguat beda (Diferensial)……….. 7
2.2.2 Penguat Inverting……….. 8
2.3 Pembagi Tegangan dan Zero Crossing Detector ……… 9
2.3.1 Rangkaian Pembagi tegangan………. 9
2.3.2 Zero Crosing Detector (ZCD) [5]………... 9
2.4 Mikrokontroler ATmega 32(L) [6]……….. 11
A. Program Memory……… 11
B. Data Memory...……….……….. 12
C. EEPROM Data Memory...……….……… 13
D.Register I/O………... ……….. 14
E. Intrupsi…..……….. 15
F. Timer...………...………..18
G. ADC……….………... 21
2.5 Metode Ziegler-Nichols pada Kontroler PID [7] ………... 24
2.5.1 Pendahuluan……… 25
2.5.2 Kontroler PID………..25
2.5.3 Penalaan Parameter Kontrol PID……… 27
2.5.4 Metode Zigeler-Nichols……….. 27
2.5.5 Metode Kurva Reaksi………. 28
A. Pengenalan…..……… 34
B. Struktur Dasar...……….. 35
C. Simbol Thyristor……….……… 35
D.Porses Penyalaan………... ……….. 37
2.10 Decoupler[11]……… 37
2.10.1 Variabel………. 37
2.10.2 Open loop gain……….. 38
2.10.3 Close loop gain………. 38
2.10.4 Relative gain………. 39
BAB III : PERANCANGAN... 41
3.1 Plant dan Aktuator………... 42
3.1.1 Tangki A………. 43
3.1.2 Tangki B……….. 43
3.1.3 Driver level dan suhu……….. 44
3.2 Sensor, Pengkondisi sinyal dan Zero Crrossing Detector………... 44
3.2.1 Sensor Suhu dan pengkondisi sinyal……….. 44
3.2.2 Sensor level dan pengkondisi sinyal………... 47
3.2.3 Zero Crrossing Detector (ZCD)……….. 50
3.3 Perancangan Decoupler Level dan Suhu air……… 50
3.4 Perancangan Kontrol PID ………... 57
BAB IV : HASIL DAN PEMBAHASA... ... 62
4.1 Model Pengendali Heater………. 62
4.2 Prinsip dan Cara kerja……….. 63
4.2.1 Analisa Perangkat Keras………... 65
4.2.2 Analisa Perangkat Lunak……….. 66
A.Inisialisasi………...66
B.Set point... ………... 67
C.Baca sensor………. ………... 68
D.Perhitungan dan hasil perhitungan………. ………... 69
E.Penggunaan fungsi – fungsi ………... 70
4.3 Data hasil Precobaan……… 71
4.3.1 Karakteristik sensor level………. 71
4.3.2 Karakteristik sensor suhu……….. 71
4.3.3 Hasil penalaan dengan PID………... 72
A. SetPoint 6 cm……… 72
B.Setpoint 9 cm……….. 73
C.Setpoint 12 cm……… 74
D. Setpoint suhu 50° C………... 76
E. Setpoint suhu 70° C………... 77
F. Setpoint suhu 90° C………... 78
4.4 Decoupler dan gangguan pengendalian dari luar sistem………. 79
BAB V : KESIMPULAN DAN SARAN... 83
Kesimpulan dan Saran... 83
DAFTAR PUSTAKA... 84
Lampiran... L1
Lampiran... L2
Lampiran... L3
Lampiran... L4
Lampiran... L5
DAFTAR GAMBAR Halaman
Gambar 2.1 Sensor LM 35 tampak bawah... 6
Gambar 2.2 Sensor Level………... 7
Gambar 2.3 Penguat Diferensial……….……... 7
Gambar 2.4 Konfigurasi penguat inverting………... 8
Gambar 2.5 Konfigurasi pembagi tegangan……….. 9
Gambar 2.6 ZCD………... 10
Gambar 2.7 ATmega 32(L)……… 11
Gambar 2.8 Program memory………. 12
Gambar 2.9 Peta data memory……….. 12
Gambar 2.10 SREG………. 13
Gambar 2.11 Intrupsi………... 15
Gambar 2.12 MCUCR / MCU Control Register………... 16
Gambar 2.13 Blok Diagram Timer 16 Bit………... 19
Gambar 2.14 Timer/Counter1 Register……….… 19
Gambar 2.15 TIMSK & TIFR………... 19
Gambar 2.16 TIFR Timer/Counter interrupt flag……….……. 20
Gambar 2.17 TCCR1B………..……….……21
Gambar 2.18 Blok diagram kontroler PID analog………. 26
Gambar 2.19 fungsi waktu sinyal keluaran masukan untuk kontroller PID ……… 26
Gambar 2.23 Blok diagram kendali digital……….... 30
Gambar 2.24 Tampilan LCD dan kaki – kakinya………... 31
Gambar 2.25 Skematik ke mikrokontroler………. ……... 31
Gambar 2.26 Tiga sambungan pn……….. ……... 35
Gambar 2.27 Simbol Thyristor……….. ……... 35
Gambar 2.28 Grafik karakteristik……….. ……... 36
Gambar 2.29 Interaksi dua variabel yang dikendalikan………. ……....38
Gambar 2.30 Decoupler………. ………40
Gambar 3.1. Alur perancangan model heater……… ……... 41
Gambar 3.2 Plant dan aktuator……….. 42
Gambar 3.3 Tangki A……….…... 43
Gambar 3.4 Tangki B………. ……... 43
Gambar 3.5 Rangkaian Driver………... 44
Gambar 3.6. Pengkondisi sinyal suhu……… 45
Gambar 3.7 Simulasi batas bawah pengkondisi sinyal suhu………. 46
Gambar 3.8 Simulasi batas atas pengkondisi sinyal suhu……….. 46
Gambar 3.9 Rangkaian buffer noninverting………... 46
Gambar 3.10 Perbandingan V sensor level dan V penguatan……….. 47
Gambar 3.11 Pengkondisi sinyal level……….. 48
Gambar 3.12 Simulasi batas bawah level……….. 49
Gambar 3.13 Pengkondisi sinyal batas atas sensor level………... 49
Gambar 3.14 ZCD……….. 50
Gambar 3.17 Penurunan level pada heater 100 %... 51
Gambar 3.18 Penurunan suhu akibat motor 100%... 51
Gambar 3.19 Kenaikan suhu pada motor konstan………. 52
Gambar 3.20 Interaksi dua variabel………... 52
Gambar 3.21 Decoupler………... 56
Gambar 3.22 Perancangan PID multivariabel………... 57
Gambar 3.23 ATmega 32………... 60
Gambar 3.24 Diagram alir program sistem LCD………. 60
Gambar 3.25 Diagram alir program sinkronisasi………... 61
Gambar 3.26 Diagram alir kendali PID digital……….. 61
Gambar 4.1 Pemodelan heater………... 62
Gambar 4.2.Kotak pengendali………... 62
Gambar 4.3.Driver Triac dan MOC 3020………. 63
Gambar 4.4. Tampilan awal LCD……….. 63
Gambar 4.5. Memasukan set-point ………... 64
Gambar 4.6. Validasi data yang dimasukan………... 64
Gambar 4.7 Karakteristik sensor level………... 71
Gambar 4.8 Karakteristik sensor suhu………... 71
Gambar 4.90 Kurva tanggapan transient pada set point 6cm………. 72
Gambar 4.10 Kurva tanggapan transient pada set point 9cm………. 73
Gambar 4.11 Kurva tanggapan transient pada set point 12cm………... 74
Gambar 4.12 Kurva tanggapan transient pada set point 50°C……….. 76
Gambar 4.13 Kurva tanggapan transient pada set point 70°C……….. 77
DAFTAR TABEL Halaman
Tabel 2.1 Konfigurasi Port... 14
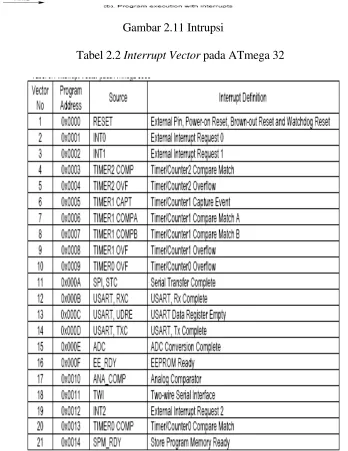
Tabel 2.2 Interrupt Vector pada ATmega 32………... 15
Tabel 2.3 MCUCR / MCU Control Register………. 16
Tabel 2.4 Sleep Mode………. ……... 16
Tabel 2.5 Interrupt 1 (INT1)……….. 17
Tabel 2.6 Interrupt 0 (INT0)………. 17
Tabel 2.7 TIMSK / Timer/Counter Interrupt Mask Register………. 20
Tabel 2.8 TIFR………... 20
Tabel 2.9 Clock Select bits1………... 21
Tabel 2.10 ADMUX………. 22
Tabel 2.11 ADLAR 0………. 23
Tabel 2.12 ADLAR 1……… 23
Tabel 2.13 SFIOR……….. 23
Tabel 2.14 ADCSRA………. 24
Tabel 2.15 Penalaan paramater PID dengan metode kurva reaksi ……… 29
Tabel 2.16 Pin dan Fungsi………. 32
Tabel 2.17 Antarmuka LCD dan mikrokontroler………... 34
Tabel 2.18 Gain open loop……… 39
Tabel 2.19 Relatif Gain……….. 40
Tabel 4.1 Perbedaan nilai antara perancangan dan pengukuran …………... 65
Tabel 4.2 Hasil pengujian alat untuk level 6 cm……… 72
Tabel 4.3 Hasil pengujian alat untuk level 9 cm………... 74
Tabel 4.4 Hasil pengujian alat untuk level 12 cm………... 75
Tabel 4.5 Hasil pengujian alat untuk suhu 50° C……….. 76
Tabel 4.6 Hasil pengujian alat untuk suhu 70° C……….. 77
Tabel 4.7 Hasil pengujian alat untuk suhu 90° C………. 78
Tabel 4.8 Hasil pengujian sistem………... 79
Tabel 4.9 Perbandingan penggunaandecoupler………... 81
BAB I
PENDAHULUAN
1.1
Judul
Kendali PID untuk mengatur lebih dari satu variabel input output pada pemodelan
heater (Multivariabel PID Controler for Heater Modeling)
1.2
Latar Belakang Masalah
Perkembangan ilmu dan pengetahuan yang semakin cepat baik di dunia, maupun di
Indonesia sendiri yang disertai dengan perkembangan ilmu – ilmu teknik kontrol baru
ataupun pengembangan dari ilmu teknik kontrol yang sudah ada ,memegang peranan
penting dalam kehidupan. Teknik kontrol automatik sangat diperlukan pada pesawat
ruang angkasa, sistem kemudi pesawat , pengendalian rudal, juga dalam proses industri .
Ada berbagai macam sistem kontrol dasar berdasarkan perkembangannya yaitu,
kontrol dua posisi , on dan off saja, kontrol proposional (P) , kontrol integral (I), kontrol
proposional integral (PI), kontrol proposional dan derivatif (PD), dan kontrol proposional
integral derivatif (PID). Di samping itu terdapat beberapa aksi kontrol lain seperti teknik
kontrol terprogram (PLC) dan teknik kontrol fuzzy [1]
Proposional Integral Derivatif atau yang sering dikenal dengan PID merupakan salah
satu teknik control close loop yang paling tua namun masih digunakan sampai sekarang
karena teknik kontrol PID ini memiliki keunikan tersendiri terhadap setiap plant yang
dikontrol dan dapat diaplikasikan dengan berbagai macam media baik secara analog yaitu
dengan menggunakan rangkaian elektronik biasa atau diaplikasikan secara digital yaitu
suhu , tekanan, aliran, level ketinggian tidak hanya mengendalikan satu variabel input
atau output saja pada suatu plant, melainkan kombinasi dari beberapa variabel input dan
output. Supaya variabel input satu dengan yang lain tidak saling terganggu diperlukan
decoupler sebagai salah satu sistem yang mengaturnya. Pada perancangan ini akan
dirancang kendali PID berbasis mikrokontroler untuk mengendalikan dua variabel , level
ketinggian dan suhu pada sebuah model heater.
1.3
Tujuan dan Manfaat
Tujuan penelitian ini adalah:1. Membuat perangkat keras pemodelan heater pada sebuah tangki
2. Membuat perangkat lunak untuk proses pengendalian suhu dan level pada set
point tertentu.
3. Mengaplikasikan kendali PID digital untuk pengendalian lebih dari satu variabel.
Diharapkan penelitian ini dapat memberikan manfaat:
1. Penelitian ini diharapakan dapat dijadikan acuan dalam mengembangkan model
PID controler multivariabel lebih dari 1 variabel.
2. Penelitian ini diharapkan dapat menjadi bahan referensi pembelajaran PID
controler pada sektor industri berkenaan dengan proses.
1.4
Batasan Masalah
Pembahasan MULTIVARIABEL INPUT OUTPUT PID CONTROLER FOR HEATER
MODELING ini lebih diarahkan dan difokuskan pada hal – hal sebagai berikut:
1. Berbasis mikrokontroler AT Mega 32 sebagai seluruh proses perhitungan PID dan
2. Hanya digunakan pada plant dengan ukuran panjang 25 cm lebar 24 cm dan tinggi
30 cm dengan model heater atau pemanas air
3. Suhu yang dikontrol berkisar 50 sampai 90 derajat celcius dengan ketinggian air
maksimum 13 cm
4. Penggunaan sistem heater sumber AC dan pompa Sumber AC tegangan PLN.
1.5
Metodologi Penelitian
Agar dapat melakukan perancangan alat dengan baik, maka penulis membutuhkan
masukan serta referensi yang didapatkan dengan metode :
1. Setudi kepustakaan yang mencakup literatur-literatur, gambar-gambar dan manual.
2. Perancangan hardware dan software.
3. Pembuatan hardware dan software berdasarkan hasil perancangan.
4. Pengujian hardware dan software.
5. Pengambilan data dari hardware dan software yang telah dibuat.
6. Pembuatan laporan.
1.6
Sistem Penulisan
BAB I : PENDAHULUANBAB ini berisi latar belakang penelitian, tujuan dan manfaat penelitian, batasan
masalah, metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
BAB ini berisi studi pustaka tentang landasan teori penelitian: Triac, sensor suhu ,
sensor potensiometer, pengkondisi sinyal , dan Mikrokontroler AT Mega 32.
BAB III : RANCANGAN PENELITIAN
BAB ini berisi tentang diagram blok perancangan perangkat keras (hardware) dan
BAB ini berisi hasil perancangan, pengujian, analisis data dan pembahasan
BAB V: KESIMPULAN DAN SARAN
BAB II
DASAR TEORI
Dalam sebuah industri
plant tidak hanya digunakan untuk keperluan satuparameter pemrosesan tetapi bisa lebih dari satu pemrosesan misalnya proses
pengendalian suhu dan level . Oleh karena itu diperlukan teknik pengendalian yang tepat
agar tidak terjadi gangguan proses pengendalian.
Kendali PID
digital multivariabel merupakan teknik pengendalian secara close loopdengan mengkombinasikan dua atau lebih besaran yang diukur dalam hal ini adalah suhu
air dan level air bertujuan meminimalkan gangguan antara satu besaran dan yang lainya
saat terjadi gangguan salah satu variabel besaran yang dikendalikan.
Sebagai dasar dari penelitian ini akan membahas:
1. Komponen sensor suhu dan sensor level
2. Penguat beda dan penguat inverting
3. Pembagi tegangan dan Zero Crossing Detector
4. Mikrokontroler
5. Tuning PID metode Ziegler – Nichols
6. Kendali PID digital
7. Piranti input dan output
8. Thyristor
9. Decoupler
Pada bab ini akan dibahas juga dasar- dasar penggunaan rangkaian dan rumus –
rumus dalam perhitungan yang akan digunakan pada bab tiga saat melakukan
perancangan terutama penentuan koefisien PID dan sistem decoupler dua variabel input
2.1.1 LM 35 [2]
Sensor LM 35 merupakan jenis sensor yang bisa langsung diaplikasikan untuk
melakukan pengukuran suhu, keluaran sensor adalah tegangan (V) dengan resolusi 10 mV
untuk satu derajat celcius.
Gambar 2.1. Sensor LM 35 tampak bawah
LM 35 memiliki kelebihan-kelebihan sebagai berikut :
1. Dikalibrasi langsung dalam celcius
2. Memiliki faktor skala linear + 10.0 mV/°C
3. Memiliki ketepatan 0,5°C pada suhu + 25°C
4. Jangkauan maksimal suhu - 55° sampai +150°C
5. Cocok untuk aplikasi jarak jauh
6. Bekerja pada tegangan catu 4 sampai 30 Volt
7. Memiliki arus drain kurang dari 60 uA
8. Pemanasan sendiri yang lambat (low self – heating), 0,08°C di udara
9. Ketidaklinearan hanya sekitar ±1 - 4°C
2.1.2 Sensor Level Potensiometer [3]
Merupakan variabel resistor yang dimodifikasi dengan menggunakan tangkai dan
pelampung serta diberikan tegangan sehingga setiap perputaran potensio menjadi
pembagi tegangan dan hasil pembagi tegangan tersebut yang dimanfaatkan.
Gambar 2.2 Sensor Level
2.2 Penguat Beda dan Penguat Inverting [4]
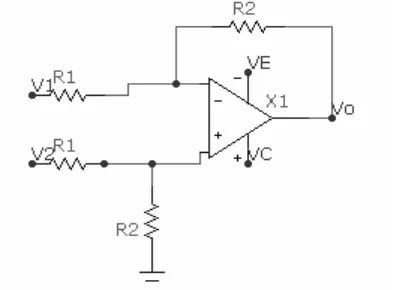
2.2.1 Rangkaian Penguat Beda (Diferensial)
Penguat beda atau penguat diferensial digunakan untuk mengurangkan sinyal
masukan dari sinyal masukan yang lainya guna mendapatkan nilai kalibrasi yang sesuai
atau mencari nilai tegangan diharapkan Vo adalah:
[
2 11 2
V V R R
Vo = −
]
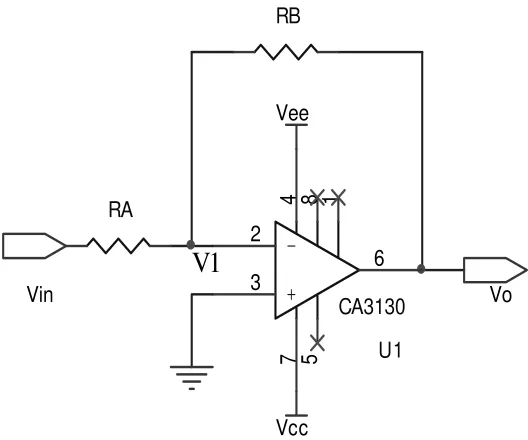
………...………(2.1)2.2.2 Penguat Inverting
Tegangan masukan Vin menggerakkan masukan pembalik melalui resistor RA . Ini
akan menghasilkan tegangan masukan pembalik V1. Tegangan masukan diperkuat oleh
perolehan tegangan kalang terbuka untuk menghasilkan tegangan keluaran yang
dibalikkan. Tegangan keluaran kemudian diumpanbalikkan ke masukan melalui resistor
umpan balik RB. Ini menghasilkan umpan balik negatif karena keluarannya berbeda 1800
dengan masukan. Dengan kata lain, setiap perubahan pada V1 dihasilkan oleh tegangan
masukan yang berlawanan dengan sinyal keluaran
Tegangan keluaran penguat inverting ditunjukkan pada persamaan 2.2.
VO = in
A B
V R R
×
− ……….……… (2.2)
Vo
V1
+
-U1 CA3130
3 2
6
7 5
4 8 1
RB
Vee
Vin
RA
Vcc
2.3 Pembagi Tegangan dan
Zero Crossing Detector
2.3.1 Rangkaian Pembagi Tegangan
Rangkaian pembagi tegangan merupakan rangkaian yang terdiri dari resistor yang
dikonfigurasikan seperti pada gambar 2.5. Vout ditentukan dengan persamaan 2.5
CC 2 1
2
out
V
R
R
V
x
R
+
=
……….….. (2.3)VCC
R2
Vout
0 R1
Gambar 2.5 Konfigurasi pembagi tegangan
2.3.2 Zero Crosing Detector (ZCD) [5]
Merupakan sebuah sistem yang digunakan untuk mendeteksi awal nilai dan akhir nilai
satu , pada sebuah gelombang sinus ZCD akan mengeluarkan logika tinggi ketika
gelombang sinus bernilai tinggi sampai nol ,dan akan berlogika 0 saat gelombang sinus
berada pada nilai negatif prinsipnya bekerja seperti komparataor dan menggunakan
masukan positif sebagai input sinyalnya.
1 1
R
V
I
=
iGambar 2.6 ZCD.
gambar ZCD yang sudah dimodifikasi karena keluaran ZCD + saturasi maka dibatasi
dengan zener supaya besarnya keluaran ZCD dapat langsung diolah secara digital. ZCD
digunakan untuk sinkronisasi PWM saat mengendalikan aktuator.
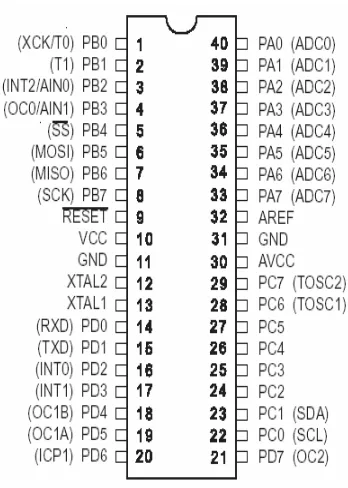
2.4 Mikrokontroler ATmega 32(L) [6]
Mikrokontroler AVR menggunakan teknologi RISC semua instruksi berukuran 16
bit sebagian besar dieksekusi dalam 1 siklus clock
Fitur yang tersedia pada ATmega 32 adalah :
• Frekuensi clock maksimum 16 MHz
• Jalur I/O 32 buah, yang terbagi dalam PortA, PortB, PortC dan PortD
• Analog to Digital Converter 10 bit sebanyak 8 input
• Timer/Counter sebanyak 3 buah
• Watchdog Timer dengan osilator internal
• SRAM sebesar 2 K byte
• Memori Flash sebesar 32 K byte dengan kemampuan read while write
• Interrupt internal maupun eksternal
• EEPROM sebesar 1024 byte yang dapat diprogram saat operasi
Gambar 2.7 ATmega 32(L)
ATmega 32 memiliki dua jenis memori yaitu Data Memory dan Program Memory
ditambah satu fitur tambahan EEPROM Memory untuk penyimpan data.
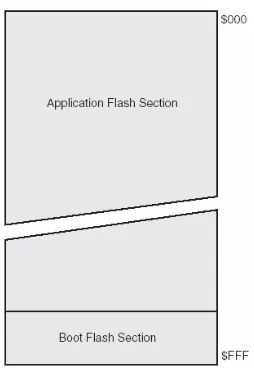
A.
Program Memory
ATmega 32 memiliki On-Chip In-System Reprogrammable Flash Memory untuk
menyimpan program. Untuk alasan keamanan, program memory dibagi menjadi dua
bagian yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section
digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan
pada saat AVR reset atau pertama kali diaktifkan. Application Flash Section digunakan
untuk menyimpan program aplikasi yang dibuat user. AVR tidak dapat menjalankan
program aplikasi ini sebelum menjalankan program Boot Loader. Besarnya memori
Boot Flash Section dapat diprogram dari 128 word sampai 1024 word tergantung setting
pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program
Gambar 2.8 Program memory
B.
Data Memory
Gambar berikut menunjukkan peta memori SRAM pada ATmega 32. Terdapat 608
lokasi alamat data memori.
96 lokasi alamat digunakan untuk Register File dan I/O Memory sementara 512 lokasi
alamat lainnya digunakan untuk internal data SRAM. Register File terdiri dari 32
general purpose working register, I/O register terdiri dari 64 register.
C.
EEPROM Data Memory
ATmega 32 memiliki EEPROM sebesar 1024 byte untuk menyimpan data.
Lokasinya terpisah dengan sistem address register, data register dan control register
yang dibuat khusus untuk EEPROM.
Status Register (SREG)
Status Register adalah register yang memberikan informasi yang dihasilkan
dari eksekusi instuksi aritmatika. Informasi ini berguna untuk mencari alternatif alur
program sesuai dengan kondisi yang dihadapi.
Gambar 2.10 SREG
Bit 7 – I : Global Interrupt Enable
Jika bit Global Interrupt Enable diset, maka fasilitas interupsi dapat dijalankan.
Bit ini akan clear ketika ada interrupt yang dipicu dari hardware. Setelah
program interrupt dieksekusi, maka bit ini harus di set kembali dengan instruksi
SEI.
Bit 6 – T : Bit Copy Storage
Instruksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan
dalam operasi bit.
Bit 5 – H : Half Carry Flag
Bit 4 – S : Sign Bit
Bit S merupakan hasil exlusive or dari Negative Flag N dan Two’s Complement
Overflow Flag V.
Bit 3 – V : Two’s Complement Overflow Flag
Jika operasi aritmatika menghasilkan bilangan negatif, maka bit ini akan set.
Bit 1 – Z : Zero Flag
Jika operasi aritmatika menghasilkan bilangan nol, maka bit ini akan set
D.
Register I/O
Setiap port ATmega 32 terdiri dari 3 register I/O yaitu DDRx, Portx dan PINx.
DDRx (Data Direction Register), register DDRx digunakan untuk memilih arah pin. Jika
DDRx = 1 maka Pxn sebagai pin output ,jika DDRx = 0 maka Pxn sebagai input.
Portx (Port Data Register)Register Portx digunakan untuk 2 keperluan yaitu untuk jalur
output atau untuk mengaktifkan resistor pullup. Portx berfungsi sebagai output jika DDRx =
1 maka jika Portxn = 1 maka pin Pxn akan berlogika high. Jika Portxn = 0 maka pin Pxn
akan berlogika low. Portx berfungsi untuk mengaktifkan resistor pull up jika DDRx = 0
maka jika Portxn = 1 maka pin Pxn sebagai pin input dengan resistor pull up. Jika Portxn
= 0 maka pin Pxn sebagai output tanpa resistor pull up.
Tabel 2.1 Konfigurasi Port
DDR xn Port xn I/O Pull Up Keterangan
0 0 Input no Tri sate Z
0 1 Input yes Pull up aktif
1 0 Output no Output low
1 1 Output no Output high
Catatan :
x menunjukkan nama port (A,B,C,D)
n menunjukkan nomor bit (0,1,2,3,4,5,6,7)
Nilai awal (initial value) seluruh register I/O adalah 00h.
E. Interupsi
kondisi yang memaksa mikrokontroler menghentikan sementara eksekusi program
utama untuk mengeksekusi rutin interrupt tertentu Interrupt Service Routine (ISR)
Setelah melaksanakan ISR secara lengkap, maka mikrokontroler akan kembali
melanjutkan eksekusi program utama yang tadi ditinggalkan.
Gambar 2.11 Intrupsi
yaitu mengeksekusi vektor utama .Sesuai dengan prioritas vektor tersebut pada tabel di
atas vektor intrupsi Reset merupakan vektor prioritas utama
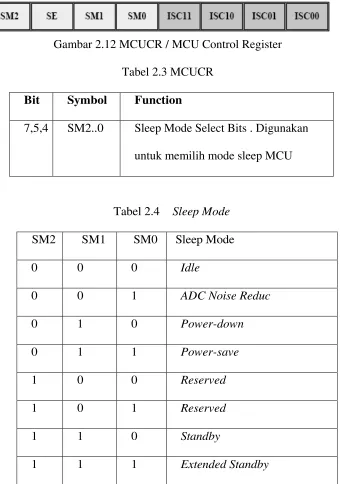
Gambar 2.12 MCUCR / MCU Control Register
Tabel 2.3 MCUCR
Bit Symbol Function
7,5,4 SM2..0 Sleep Mode Select Bits . Digunakan
untuk memilih mode sleep MCU
Tabel 2.4 Sleep Mode
SM2 SM1 SM0 Sleep Mode
0 0 0 Idle
0 0 1 ADC Noise Reduc
0 1 0 Power-down
0 1 1 Power-save
1 0 0 Reserved
1 0 1 Reserved
1 1 0 Standby
1 1 1 Extended Standby
Tabel 2.5 Interrupt 1 (INT1).
ISC11 ISC10 Description
0 0 logika 0 pada pin INT 1 menyebabkan intrupsi
0 1 perubahan logika pada pin INT 1 menyebabkan
intrupsi
1 0 perubahan kondisi 1 ke 0 di INT 1 menyebabkan
intrupsi
1 1 perubahan kondisi 0 ke 1 di INT 1 menyebabkan
intrupsi
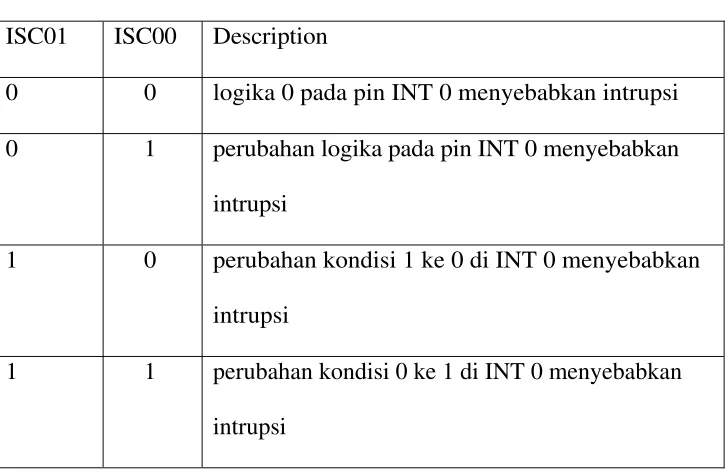
ISC01, ISC00 Interrupt Sense Control 0 Bit. Digunakan untuk memilih jenis pulsa
trigger External
Tabel 2.6 Interrupt 0 (INT0).
ISC01 ISC00 Description
0 0 logika 0 pada pin INT 0 menyebabkan intrupsi
0 1 perubahan logika pada pin INT 0 menyebabkan
intrupsi
1 0 perubahan kondisi 1 ke 0 di INT 0 menyebabkan
intrupsi
1 1 perubahan kondisi 0 ke 1 di INT 0 menyebabkan
intrupsi
Timer pada dasarnya hanya menghitung pulsa clock. Frekuensi pulsa clock yang
dihitung tersebut bisa sama dengan frekuensi crystal yang dipasang dan dapat
diperlambat menggunakan prescaler dengan faktor 8, 64, 256 atau 1024. Berikut
penjelasannya .Sebuah AVR menggunakan crystal dengan frekuensi 8 MHz dan timer
yang digunakan adalah timer 16 bit, maka maksimum waktu timer yang bisa dihasilkan
adalah :
TMAX = 1/fCLK x (FFFFh+1)………..……….(2.5)
= 0.12Sx 65536
= 0.008192 s
Untuk menghasilkan waktu timer yang lebih lama dapat digunakan prescaler, misalnya
1024, maka maksimum waktu timer yang bisa dihasilkan adalah :
TMAX = 1/fCLK x (FFFFh+1) x N………(2.6)
= 0.125uS x 65536 x 1024
= 8.388608 s
ketika presacaler digunakan, waktu timer dapat diperpanjang namun tingkat
ketelitiannya menjadi turun. Misalnya dengan prescaler 1024 nilai timer akan
bertambah 1 setiap kelipatan 1024 pulsa dan membutuhkan waktu 1/fCLK x 1024 =
0.125us x 1024 = 128 us d i bandingkan tingkat resolusi ini jika tanpa precsaler
(0.125us).
Timer 16 Bit Normal Mode, pada mode normal, TCNT1 akan menghitung naik dan
membangkitkan interrupt Timer/Counter 1 ketika nilainya berubah dari 0xFFFF ke
0x0000. untuk menggunakan timer cukup dengan memasukkan nilai yang diinginkan ke
menghitung mundur. Untuk timer yang menghitung maju, maka harus memasukkan nilai
65536-(timer value) ke dalam TCNT1.
Gambar 2.13 Blok Diagram Timer 16 Bit
Timer/Counter1 Register digunakan untuk menyimpan nilai timer yang diinginkan.
TCNT1 dibagi menjadi 2 register 8 bit yaitu TCNT1H dan TCNT1L.
Gambar 2.14 Timer/Counter1 Register
Timer Interrupt Mask Register (TIMSK) dan Timer Interrupt Flag (TIFR)
Gambar 2.15 TIMSK & TIFR
Register digunakan untuk mengendalikan interrupt mana yang diaktifkan dengan
cara melakukan setting pada TIMSK dan untuk mengetahui interrupt mana yang sedang
Bit Symbol Fuction
7 OCIE2 Timer/Counter2 Output Compare Match Interrupt Enable .
6 TOIE2 Timer/Counter2 Overflow Interrupt Enable.
5 TICIE1 Timer1 Input Capture Interrupt Enable
4 OCIE1A Timer/Counter1A Output Compare Match Interrupt Enable .
3 OCIE1B Timer/Counter1B Output Compare Match Interrupt Enable .
2 TOIE1 Timer/Counter1 Overflow Interrupt Enable.
4 OCIE0 Timer/Counter0 Output Compare Match Interrupt Enable .
0 TOIE0 Timer/Counter0 Overflow Interrupt Enable.
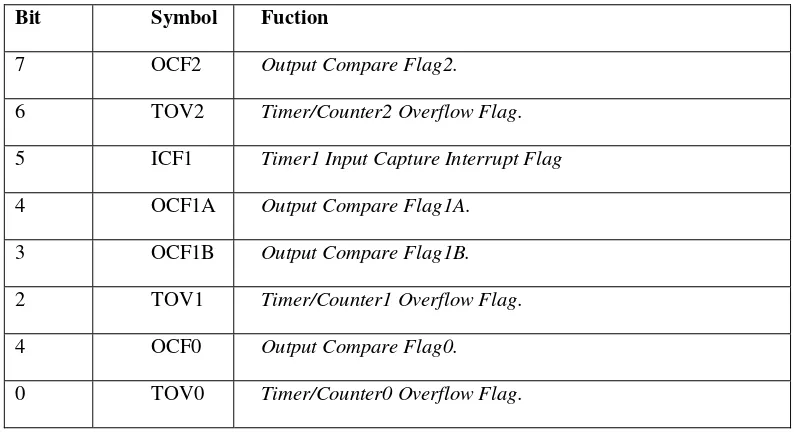
Gambar 2.16 TIFR / Timer/Counter Interrupt Flag Register
Tabel 2.8 TIFR
Bit Symbol Fuction
7 OCF2 Output Compare Flag2.
6 TOV2 Timer/Counter2 Overflow Flag.
5 ICF1 Timer1 Input Capture Interrupt Flag
4 OCF1A Output Compare Flag1A.
3 OCF1B Output Compare Flag1B.
2 TOV1 Timer/Counter1 Overflow Flag.
4 OCF0 Output Compare Flag0.
Timer/Counter1 Control Register B digunakan untuk mengatur mode timer,
prescaler dan pilihan lainnya.
Gambar 2.17 TCCR1B
CS12..10: Clock Select bits ;
Tiga bit pemilih prescaler timer/counter 1 dan hubungannya dengan clock eksternal
pada pin T1.
Tabel 2.9 Clock Select bits
Bahasa Pemrograman pada jenis mikrokontroler ATmega 32(L) ini menggunakan
sofeware CodeVision dengan bahasa pemrograman C untuk menuliskan program IC
sebelum diubah ke dalam ekstensi heksa.
G. ADC
(Analog to digital Converter)
Merupakan fasilitas mikrokontroler yang digunakan untuk membaca data analog dan
mengubah menjadi data digital.
ADC mikrokontroler ini memiliki fitur:
1. Resolusi 10 bit dan 8 bit
4. Waktu konversi 65 – 250 µS
5. Delapan kanal masukan
6. Tegangan revferensi internal 2,56 V
7. Dapat bekerja secara free running atau saat diperlukan saja
8. Selang tegangan masukan dari 0 – 5 VCC
9. Intrupsi dapat dibangkitka setelah konversi selesai
Inisialisasi ADC meliputi proses penentuan clock ADC pemilihan saluran tegangan
referensi ADC , format keluaran data dan mode pembacaan. Register yang menangani
ADC internal ini adalah ADMUX berfungsi menentukan tegangan referensi ADC,
format data keluaran , dan pemilihan jalur masukan Komponen ADMUX dapat dilihat
pada tabel 2.9. Register SFIOR berfungsi untuk mengatur sumber picu konversi ADC.
Komponen register ini dapat dilihat pada tabel 2.12, Regiter ADCSRA berfungsi
melakukan manajemen sinyal control dan status dari ADC, komponen bitnya dapat dilihat
pada tabel 2.14
Tabel 2.10 ADMUX
Bit 7 6 5 4 3 2 1 0
ADMUX REFS1 REFS0 ADLAR MUX4 MUX3 MUX2 MUX1 MUX0
R / W
REFS (1:0) (Reference Selection Bit), digunakan sebagai pemilih sumber tegangan
referensi dari ADC . ADLAR (ADC Left Adjust Result) digunakan untuk menentukan
Tabel 2.11 ADLAR 0
Bit 15 14 14 12 11 10 9 8
- - - ADC9 ADC8
ADC7 ADC6 ADC5 ADC4 ADC3 ADC2 ADC1 ADC0
Bit 7 6 5 4 3 2 1 0
Tabel 2.12 ADLAR 1
Bit 15 14 14 12 11 10 9 8
ADC9 ADC8 ADC7 ADC6 ADC5 ADC4 ADC3 ADC2
ADC1 ADC0 - - -
Bit 7 6 5 4 3 2 1 0
ADTS(2:0) (ADC Auto Triger Source) untuk menentukan mode dari ADC yang
digunakan. ADEN (ADC Enable) berfungsi untuk mengaktifkan ADC jika bernilai satu .
ADSC (ADC Start Converstion) akan bernilai nol jika selesai mengkonversi dan bernilai
satu jika ingin memulai konversi.
ADATE (ADC Auto Triger Enable), berhubungan dengan bit (ADTS) pada register
SFIOR . Jika bernilai satu maka menyebabkan triger otomatis akan aktif. ADIF (ADC
Intrrupt Flag) bit ini akan aktif , jika konversi telah selesai dan dapat memicu interupsi ,
selama fasilitas interupsi diaktifkan.
Tabel 2.13 SFIOR
Bit 7 6 5 4 3 2 1 0
SFIOR ADTS2 ADTS1 ADTS0 - ACME PUD PSR2 PSR10
Bit 7 6 5 4 3 2 1 0
ADCSRA ADEN ADSC ADATE ADIF ADIE ADPS2 ADPS1 ADPS0
R/W R/W R/W R/W R/W R/W R/W R/W R/W
Jika ADIE (ADC Interrupt Enable) bernilai bit 1 pada SREG 1 dan terjadi picuan dari
bit ADIF, maka rutin intrupsi ADC akan dijalankan.
ADPS (2:0) ( ADC Prescaler Select Bits) mendifinisikan faktor pembagi dari sumber
clock ADC .Resolusi untuk 10 bit ADC dirumuskan :
Resolusi (V) = Vref / 2 n n = resolusi ADC. ……….(2.7)
Sedangkan Vref merupakan nilai tegangan referensi maksimal yang diberikan untuk
penggunaan ADC.
2.5 Metode Ziegler-Nichols pada Perancangan Kontroler PID [7]
Penalaan parameter kontroler PID (Proporsional Integral Diferensial) selalu didasari
atas tinjauan terhadap karakteristik yang diatur (Plant). Dengan demikian betapapun
rumitnya suatu plant, perilaku plant tersebut harus diketahui terlebih dahulu sebelum
penalaan parameter PID dilakukan.
Karena penyusunan model matematik plant tidak mudah, maka dikembangkan suatu
metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu
perubahan. Dengan menggunakan metode itu model matematik perilaku plant tidak
diperlukan lagi, karena dengan menggunakan data yang berupa kurva keluaran, penalaan
2.5.1 Pendahuluan
Keberadaan kontroler dalam sebuah sistem kontrol mempunyai kontribusi yang besar
terhadap prilaku sistem. Pada prinsipnya hal itu disebabkan oleh tidak dapat diubahnya
komponen penyusun sistem tersebut. Artinya, karakteristik plant harus diterima
sebagaimana adanya, sehingga perubahan perilaku sistem hanya dapat dilakukan melalui
penambahan suatu sub sistem, yaitu kontroler. Salah satu tugas komponen kontroler
adalah mereduksi sinyal kesalahan, yaitu perbedaan antara sinyal setting dan sinyal
aktual. Hal ini sesuai dengan tujuan sistem kontrol adalah mendapatkan sinyal aktual
senantiasa (diinginkan) sama dengan sinyal setting. Semakin cepat reaksi sistem
mengikuti sinyal aktual dan semakin kecil kesalahan yang terjadi, semakin baik kinerja
sistem kontrol yang diterapkan.
Apabila perbedaan antara nilai setting dengan nilai keluaran relatif besar, maka
kontroler yang baik seharusnya mampu mengamati perbedaan ini untuk segera
menghasilkan sinyal keluaran untuk mempengaruhi plant. Dengan demikian sistem secara
cepat mengubah keluaran plant sampai diperoleh selisih antara setting dengan besaran
yang diatur sekecil mungkin
2.5.2 Kontroler PID
Setiap kekurangan dan kelebihan dari masing-masing kontroler P, I dan D dapat saling
menutupi dengan menggabungkan ketiganya secara paralel menjadi kontroler proposional
menghilangkan offset dan menghasilkan perubahan awal yang besar.
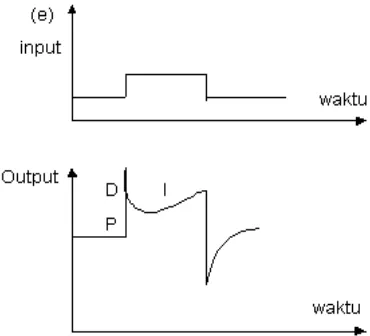
Gambar 2.18 Blok diagram kontroler PID analog
Keluaran kontroller PID merupakan jumlahan dari keluaran kontroler proporsional,
keluaran kontroler integral. Gambar 2.18 menunjukkan hubungan tersebut.
Gambar 2.19 Hubungan dalam fungsi waktu antara sinyal keluaran dengan masukan
untuk kontroller PID
Karakteristik kontroler PID sangat dipengaruhi oleh kontribusi besar dari ketiga
parameter P, I dan D. Penyetelan konstanta Kp, Ti, dan Td akan mengakibatkan
dapat disetel lebih menonjol dibanding yang lain. Konstanta yang menonjol itulah akan
memberikan kontribusi pengaruh pada respon sistem secara keseluruhan .
2.5.3 Penalaan Paramater Kontroler PID
Penalaan parameter kontroller PID selalu didasari atas tinjauan terhadap karakteristik
yang diatur (Plant). Dengan demikian betapapun rumitnya suatu plant, perilaku plant
tersebut harus diketahui terlebih dahulu sebelum penalaan parameter PID itu dilakukan.
Karena penyusunan model matematik plant tidak mudah, maka dikembangkan suatu
metode eksperimental. Metode ini didasarkan pada reaksi plant yang dikenai suatu
perubahan. Dengan menggunakan metode itu model matematik perilaku plant tidak
diperlukan lagi, karena dengan menggunakan data yang berupa kurva keluaran, penalaan
kontroler PID telah dapat dilakukan. Penalaan bertujuan untuk mendapatkan kinerja
sistem sesuai spesifikasi perancangan. Ogata menyatakan hal itu sebagai alat control
(controller tuning) metode pendekatan eksperimen yang akan digunakan adalah
Ziegler-Nichols .
2.5.4 Metode Ziegler-Nichols
Ziegler-Nichols pertama kali memperkenalkan metodenya pada tahun 1942. Metode
ini memiliki dua cara, metode osilasi dan kurva reaksi. Kedua metode ditujukan untuk
menghasilkan respon sistem dengan lonjakan maksimum sebesar 25%.
Metode ini didasarkan terhadap reaksi sistem untaian terbuka. Plant sebagai untaian
terbuka dikenai sinyal fungsi tangga satuan. Kalau plant minimal tidak mengandung
unsur integrator ataupun pole-pole kompleks, reaksi sistem akan berbentuk S. Gambar
2.22 menunjukkan kurva berbentuk S tersebut. Kelemahan metode ini terletak pada
ketidak mampuan untuk plant integrator maupun plant yang memiliki pole kompleks.
Gambar 2.21 Respon tangga satuan sistem
Gambar 2.22 Kurva Respons berbentuk S.
Kurva berbentuk-s mempunyai dua konstanta, waktu mati (dead time) L dan waktu
tunda T. Dari gambar 2.22 terlihat bahwa kurva reaksi berubah naik, setelah selang waktu
keadaan mantapnya. Pada kurva dibuat suatu garis yang bersinggungan dengan garis
kurva. Garis singgung itu akan memotong dengan sumbu absis dan garis maksimum.
Perpotongan garis singgung dengan sumbu absis merupakan ukuran waktu mati, dan
perpotongan dengan garis maksimum merupakan waktu tunda yang diukur dari titik
waktu L.
Penalaan parameter PID didasarkan perolehan kedua konstanta itu. Zeigler dan
Nichols melakukan eksperimen dan menyarankan parameter penyetelan nilai Kp, Ti, dan
Td dengan didasarkan pada kedua parameter tersebut. Tabel 2.15 merupakan rumusan
penalaan parameter PID berdasarkan cara kurva reaksi.
Tabel 2.15 Penalaan paramater PID dengan metode kurva reaksi
Tipe
Kontroler
Kp Ti Td
P T/L ~ 0
PI 0,9 T/L L/0.3 0
PID 1,2 T/L 2L 0,5L
2.6 Kendali PID Digital [8]
Kontroler adalah komponen yang berfungsi mengurangi sinyal kesalahan . Tipe
kontroler yang paling populer adalah kontroler PID .
Elemen – elemen kontroler P , I dan D masing – masing secara keseluruhan bertujuan
untuk mempercepat reaksi sebuah sistem , menghilangkan offset dan menghasilkan
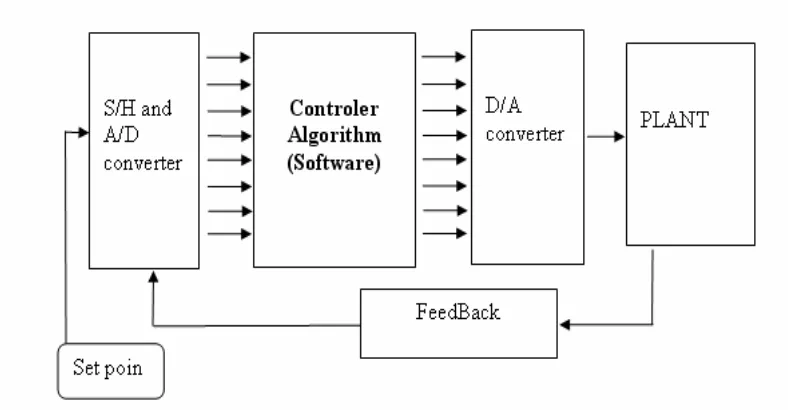
utama yaitu konroler digital tidak dapat menerima sinyal analog langsung. Dengan
keterbatasan tersebut maka diperlukan ADC untuk mengubah sinyal analog ke bentuk
digital dalam bentuk bilangan biner dan sebaliknya DAC untuk mengubah data digital
menjadi data analog. Gambar 2. 23 memperlihatkan blok diagram sebuah kendali digital.
Pada kendali PID digital untuk memperoses algoritma PID dengan cara yang efisien
maka proses dari integral dan diferensial diubah ke dalam bentuk aljabar yang ringkas.
Bentuk aljabar yang digunakan adalah perkalian , pembagian , penjumlahan dan
pengurangan dengan mengacu pada algoritma kontroler analog.
Gambar 2.23 Blok diagram kendali digital
Transfer function dari sistem berdasarkan gambar di atas
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + =
= T s
s T Kp s H s s u d i 1 1 ) ( ) ( ……….(2.8)
Dalam domain waktu:
Karena data E(n+1) adalah data yang akan datang dan belum tersedia , maka
perhitungan data yang akan datang digunkan data yang saat ini E(n) jika n adalah t untuk
setiap sampel waktu maka persamaan diskritnya :
V(n)= K E(n)+ K Tp I
∑
== nT i
i
i E
0
)
( + [E(n)−E(n−1)]
T KD
………(2.10)
Dengan Ki =
Ti T Kp+
dan Kd =
T Td Kp+
T = waktu sampling
Dengan hasil penyederhanaan nilai sigma (2.9) maka di peroleh:
U(n)= u (n-1) + Kp ( e(n)- e(n-1) )+ Kie(n)+Kd(e(n)-2e(n-1)+e(n-2))...…(2.11)
2.8 Piranti Input Output [9]
Gambar 2.24 Tampilan LCD dan kaki – kakinya
Tampilan LCD merupakan karakter dengan resolusi dua baris dan masing masing
baris terdapat enam belas karakter yang bisa digunakan sesuai dengan data yang
dituliskan kedalam mikrokontroler internal LCD tersebut.
PIN Name Function
1 VSS Ground voltage
2 VCC +5V
3 VEE Contrast voltage
4 RS
Register Select
0 = Instruction Register
1 = Data Register
5 R/W
Read/ Write, to choose write or read mode
0 = write mode
1 = read mode
6 E Enable
0 = start to lacht data to LCD character
1= disable
7 DB0 LSB
8 DB1 -
9 DB2 -
10 DB3 -
11 DB4 -
12 DB5 -
13 DB6 -
14 DB7 MSB
15 BPL Back Plane Light
16 GND Ground voltage
Display karakter pada LCD diatur oleh pin EN, RS dan RW ,jalur EN dinamakan
Enable. Jalur ini digunakan untuk memberitahu LCD bahwa sedang mengirimkan sebuah
data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika
low “0” dan set pada dua jalur kontrol yang lain RS dan RW. Ketika dua jalur yang lain
telah siap, set EN dengan logika “1” dan tunggu untuk sejumlah waktu tertentu ( sesuai
dengan datasheet dari LCD tersebut ) dan berikutnya set EN ke logika low “0” lagi.
sebagi sebua perintah atau instruksi khusus ( seperti clear screen, posisi kursor dll ).
Ketika RS berlogika high “1”, data yang dikirim adalah data teks yang akan ditampilkan
pada tampilan LCD.
Bus data terdiri dari 4 atau 8 jalur ( bergantung pada mode operasi yang dipilih oleh
user ). Pada data 8 bit, jalur diacukan sebagai DB0 s/d DB7 jalur data
Karena menggunakan bahasa C dan sudah terdapat file LCD.h sebagi header file yang
akan disertakan kedalam mikrokontroler maka penulisan tampilan LCD menjadi lebih
mudah. Beberapa perintah dasar yang harus dipahami adalah :
lcd_init(X);
merupakan perintah untuk menginisialisasi berapa banyak ruang karakter yang akan
dipesankan nilai X maksimal adalah 16 untuk LCD 2 x16.
lcd_clear();
Perintah ini digunakan untuk menghapus tampilan dan Ram sementara LCD
sprintf(lcd_buffer,"PID Digital\nFor Heater");
Perintah ini digunakan untuk menuliskan karakter, yang terdapat dalam tanda kurung
petik dua ke dalam LCD. \n digunakan untuk memindahkan tulisan ke baris dua yang
ada dibawah..
lcd_puts(lcd_buffer);
Perintah ini digunakan untuk memasukan nilai – nilai ke dalam register tunggu sebelum
ditampilkan LCD .
Lcd_gotoxy(x,y);
Perintah yang digunakan untuk meletakan kursor pada baris x, kolom y. x dan y adalah
nilai yang besarnya 0 sampi 15.
“Level:…..Cm” pada baris bawah. %u digunakan untuk menampilkan nilai dari variabel
B . Karena menggunakan file header LCD.h pada Codevision makan untuk koneksi
antarmuka LCD dan mikrokontroler juga harus disesuaikan seperti pada tabel berikut:
Tabel 2.17 Antarmuka LCD dan mikrokontroler
PIN LCD Keterangan PIN Mikrokontroler Keterangan
1 GND 11 GND
2 +5V 10 VCC
4 RS 22 Port C.0
5 RD 23 Port C.1
6 EN 24 Port C.2
11 D4 26 Port C.4
12 D5 27 Port C.5
13 D6 28 Port C.6
14 D7 29 Port C.7
Jalur data yang digunakan sebanyak 4 bit dan dalam 1 port sudah bisa mencukupi
kebutuhan antarmuka LCD 2x16 karakter ini. Sehingga dapat menghempat penggunaan
port pada AT mega 32.
2.9 THYRISTOR [10]
A. Pengenalan
Thyristor biasanya disebut ( penyearah semi penghantar terkendali / SCR )
penyearah. Merupakan salah satu bagian dari power device yang mampu menangani daya
seperti saklar yang dapat dinyalakan dengan mengendalikan terminal “gate”-nya tetapi
tidak dapat dimatikan melalui terminal “gate”.
B. Struktur Dasar
Gambar 2.26 Tiga sambungan pn
Gambar 2.27 Simbol Thyristor
C. Simbol Thyristor
z Gambar diatas menunjukkan penampang melintang Thyristor yang terdiri dari
empat lapisan semikonduktor pn.
z Thyristor merupakan device semikonduktor paling besar.
z Dari simbol diatas dapat diketahui bahwa Thyristor adalah dioda penyearah yang
Gambar 2.28 Grafik karakteristik
z Grafik mirip grafik karakteristik dioda; saat mendapat bias balik akan
menghantarkan arus yang sangat kecil hingga terjadi kebocoran .
z Tegangan reverse maksimum ( maximum reverse working voltage ) disingkat
VRWM dapat mencapai 7000 Volt. Pada saat bias reverse terjadi arus bocor reverse
bias yang sangat kecil yang disebut reverse curent
( IR ).
z Keadaan forward blocking terjadi ketika tegangan anoda diberi tegangan lebih
positif daripada tegangan katoda pada gambar 2.26 ,sambungan pn J1 dan J3
berada pada keadaan bias maju. Namun sambungan J2 dalam keadaan bias balik (
off state ) dan arus bocor dikenal sebagai arus off – state ID.
z Jika tegangan VAK ditingkatkan sampai mencapai nilai tertentu, sambungan J2
akan bocor ( avalanche breakdown ). Nilai tertentu tersebut dinamakan forward
breakdown voltage, VBO. Pada saat itu akan terjadi arus anode yang besar yang
berarti thyristor menghantar.
z Arus anode harus lebih besar dari holding current IH, agar diperoleh cukup banyak
muatan bebas yang melewati sambungan – sambungan sehingga devais tetap
z Thyristor juga dapat dibuat menghantar dengan cara meningkatkan VAK ( dapat
merusak thyristor ). Dalam prakteknya VAK diberikan pada batas bawah nilai VBO
dan thyristor dihidupkan dengan memberikan sinyal positif antara gerbang dan
katoda.
D. Proses Penyalaan ( Turn – On Process
)
Ada beberapa cara menyalakan thyristor seperti berikut:Cahaya.
Jika cahaya diijinkan mengenai sambungan thyristor, pasangan elektron – hole
akan meningkat. Cara ini dapat dilakukan dengan membiarkan mengenai waffer
thyristor.
Arus gerbang.
Jika suatu thyristor diberi tegangan maju, injeksi arus pada gerbang dengan
memberi tegangan positif gerbang – katoda akan membuat thyristor on. Ketika
arus gerbang ditingkatkan maka tegangan forward blocking akan menurun.
2.10 Decoupler[11]
Untuk mengurangi interaksi di antara dua masukan variabel yang dikendalikan
atau mengeliminasi gangguan interaksi tersebut dibutuhkan sebuah sistem yang tepat,
yaitu mengunakan decoupling.
Dalam perancangan decoupler harus mendifiniskan hal – hal seperti berikut:
2.10.1 Variabel
Merupakan banyaknya variabel yang akan dikendalikan pada sebuah sistem proses
M1 C1 K11
K12
K21
M2 K22
C2
Gambar 2.29 Interaksi dua variabel yang dikendalikan
2.10.2
Open Loop Gain (K )
ijMerupakan perbandingan penguatan kontroler variabel i terhadap masukan ke j bila
manipulatedvariabel yang lain konstan.
2 1 1 11 M M C K ∆ ∆ = ………(2.12) 1 2 1 12 M M C K ∆ ∆ = ………...….(2.13) 2 1 2 21 M M C K ∆ ∆ = ……….(2.14) 1 2 2 22 M M C K ∆ ∆ = ………...…(2.15)
2.10.3 Close Loop Gain (K
')
j iPerbandingan penguatan kontroler variabel ke i terhadap manipulasi variabel ke j bila
variabel lain konstan
2 ' 2 1 12 C M C K ∆ ∆ = ………..….(2.17) 1 ' 1 2 21 C M C K ∆ ∆ = ………...(2.18) 1 ' 2 2 22 C M C K ∆ ∆ = ………..….(2.19)
2.10.4 Relative Gain
Sehingga dari kedua kedaan sebelumnya dapat diperoleh U atau relatif gain untuk
semua K j i 11 ' 11 11 K K
U = ………...(2.20)
12 ' 12 12 K K
U = ………..(2.21)
21 ' 21 21 K K
U = ………..(2.22)
22 ' 22 22 K K
U = ………..(2.23)
Perancangan decopler dapat dilakukan sebagai berikut:
Dari hasil Gain open loop diperoleh perbandingan matrik 2 x 2 yaitu dua variabel
masukan dan dua variabel keluran .C= variabel keluran dan M = variabel masukan
Tabel 2.18 Gain open loop
M1 M2
C1 K11 K12
bagian relatif gain (2.9.4) ,akan diperoleh matrik 2 x 2 seperti berikut:
Tabel 2.19 Relatif Gain
M1 M2
C1 U11 U12
C2 U21 U22
Maka diperoleh pasangan yang tepat yaitu yang memiliki nilai paling besar dan
tidak negatif. Misal U11 dan U22. Perancangan pengendali yang akan digunakan yaitu C1
– M1 dan C2 – M 2.Berdasarkan grafik data hasil open loop, sedangkan U21 dan U12
dieleminasi dengan decoupler.
H1
+
Gv1 G11
Gambar 2.30 Decoupler
) ( 11 ) ( 12 ) ( 12 s G s G s
D = ……….(2.24)
) ( 22 ) ( 21 ) ( 21 s G s G s
D = ...………..(2.25)
H2 Gc1 Gc2 D21 D12 G21 G12 + +
Gv2 G22
BAB III
PERANCANGAN
Ada pun bagian – bagian dari perancangan yang akan dibuat pada penelitian kendali
PID untuk mengatur lebih dari satu variabel input output pada pemodelan heater (Multi
variabel PID Controler for Heater Modeling) adalah sebagai berikut:
1. Driver, plant dan aktuator
1. Sensor, pengkondisi sinyal dan Zero Crossing Detector
2. Perancangan decoupler
3. Perancangan kontrol PID
4. Perancangan tampilan input output
Secara garis besar model perancangan yang akan dibuat adalah sebagai berikut:
Gambar 3.1. Alur perancangan model heater
Dalam penelitian ini sistem heater modeling digunakan untuk menjaga level
akan habis karena ada sistem PID yang mengendalikan pompa untuk tetap memasukan air
ke tangki pada set point yang sudah ditentukan sehingga heater air tidak rusak. Proses
pemanasan air akan terus berlangsung sampai suhu air mencapai set point yang
diharapkan.
3.1 Plant dan Aktuator
Plant dan aktuator merupakan bagian dari sebuah sistem yang akan dikendalikan.
Dalam penelitian ini, sistem pengendalian menggunakan teknik kontrol PID digital.
Sistem ini terdiri dari dua bagian aktuator yaitu motor pompa air satu phasa, dan empat
heater air AC 220 / 300 W dengan plant berupa dua tangki air, satu sebagai supplay air
dan yang lain sebagai tangki pemanas air sseperti pada gambar 3.2 berikut.
1. Sensor ketinggian air
2. Tangki Bagian B
3. Heater air
4. Sensor suhu LM35
5. Pompa motor air satu fase
6. Tangki bagian A.
3.1.1 Tangki A
Merupakan tangki tempat penampungan air yang akan diisi ke tangki B.
Tangki A memiliki sepsifikasi panjang 50 cm, lebar 30 cm dan tinggi 30 cm. Dalam
tangki terdapat sebuah motor Ac 1 fase. Motor ac tersebut merupakan motor pompa air
yang digunakan untuk memompa air dari tangki A ke tangki B.
Gambar 3.3 Plant tangki A
3.1.2 Tangki B
Tangki B merupakan tempat proses pemanas air dengan menggunakan empat heater
air masing – masing AC 220 / 300 watt dan penentu ketinggian level air berlangsung
.Semua proses dan parameter pengukuran terdapat pada tangki B. Tangki B memiliki
sepesifikasi panjang 30 cm , lebar 25cm dan tinggi 25 cm.
Pada perancangan ini digunakan rancangan driver Triac yang di kendalikan melalui
kaki gate dan MOC sebagai pengaman dari bagian DC terhadap bagian AC. Pada
perancangan ini digunakan rangkaian yang di sarankan dari data sheet MOC seperti pada
gambar 3.4 . yang dikendalikan melelui PWM dari bagian input MOC
J4
AC 220/50 Hz
1 2
J2
In
1 2
J1
MOC
1
3 5 7 2
4 6
8 Q1
Q4008L4/TO R1
180
R2 1200
C1 1u
J3
To Load
1 2
Gambar 3.5 Rangkaian Driver.
3.2 Sensor, Pengkondisi Sinyal dan
Zero Crossing Detector
Sensor digunakan untuk membaca keadaan yang terjadi atau alat yang digunakan
untuk mengubah satu besaran ke besaran yang lainnya. Pada penelitian ini digunakan dua
sensor, sensor suhu LM 35 dan sensor potensiometer yang dimodifikasi menjadi sensor
pengukur ketinggian air. Kedua sensor yang digunakan mengkonversi besaran suhu ke
dalam bentuk level tegangan DC ,dan ketinggian air ke dalam level tegangan DC .
3.2.1 Sensor Suhu dan Pengkondisi Sinyal
Sensor suhu LM 35 memiliki keluaran 10 mV/ 1 C dan setiap kenaikannya adalah
linear dan tingkat errornya sangat kecil. Pada perancangan data yang diperoleh untuk
batasan - batasan suhu digunakan adalah sebagai berikut :
0
Batasan bawah suhu air kamar = 240 mV
Perancangan pengkondisi sinyal dirancang supaya bisa langsung dikonversi ke dalam
batasan – batasan penggunaan level tegangan digital. Karena suhu air tidak bisa tetap dan
selalu berubah – rubah meyesuaikan dengan suhu ruangan tempat air maka digunakan
penguat inverting dengan batasan berikut:
Tegangan puncak dari sensor = 1V
Tegangan reffrensi adc adalah = 5 V
Maka : 5 1 5 ) 0 . 3 ...( ... ... ... ... ... ... ... ... 1 2 − = − = = − = AV AV R R Vi Vo AV
R1 =10K ohm
R2 =AV.10K
=50K ohm
X1 X2 X3 R1 50k R2 10k R3 10k R4 10k V Sensor D1 R5 10 Vo T VC VE VC VE VC VE
Gambar 3.6 Pengkondisi sinyal suhu
Dari gambar 3.6 diharapkan adalah tegangan keluaran setelah pengkondisi sinyal
mempunyai range 5 V pada 100 derajat celcius dengan keluran sensor sebesar 1 volt,
keluran sensor diberi buffer non inverting agar tidak terjadi jatuh tegangan. Keluaran dari
penguat non invreting adalah sinyal minus sehingga dikalikan satu kali dengan penguat
X1 X2 X3 R2 10k R3 10k V3 240mv R4 10k R5 10k R6 10k D1 R7 10 VC VC VC VE -697.297u 347.508u -1.199 240m -697.404u 335.253u 1.2 1.2 15 -15 15 15 -15
Gambar 3.7 Simulasi batas bawah pengkondisi sinyal suhu
Dari hasil simulasi menunjukan batas bawah sensor suhu pada keluaran 240 mV (suhu
air pada malam hari), setelah melewati pengkondisi sinyal memiliki keluaran 1,2 V .
Sedangkan untuk batas atas dengan keluaran sensor sebesar 1 V,setelah melewati
pengkondisi sinyal memiliki keluraan sebesar 5 V, dioda zener
(D 1) digunakan untuk membatasi keluaran pengkondisi sinyal berkisar antara 0 sampai
5,1 Volt. X1 X2 X3 R1 50k R2 10k R3 10k V3 1v R4 10k R5 10k R6 10k D1 R7 10 VC VE VC VE VC VE -697.128u 366.934u -4.998 1 1.001 -697.573u 315.857u 5 5 15 -15 15 -15 15 -15
Gambar 3.8 Simulasi batas atas pengkondisi sinyal suhu
3.2.2 Sensor Level dan Pengkondisi Sinyal
Untuk membaca ketinggian air digunakan sensor potensiometer dengan prinsip pembagi tegangan .Sistem sensor menggunakan teknik pelampung dan tangkai yang
memutar potensio pada saat terjadi perubahan ketinggian air. Akibat terjadi perubahan
nilai hambatan potensio terjadi perubahan juga pada pembagi tegangan . Nilai perubahan
tegangan tersebut digunakan sebagai keluaran dari sensor ketinggian air
Batas bawah sensor = 2.7V pada ketinggian 0 cm
Batas atas sensor = 3.9 V pada ketinggian 18cm
Sehingga dirancang pengkondisi sinyal yang mengkonversi besarnya nilai
2.7 V menjadi 0 V, dan 3.9 V menjadi 5 V.
Gambar 3.10 Perbandingan V sensor level dan V penguatan
Dari gambar 3.10 diharapkan tegangan keluaran setelah pengkondisi sinyal
mempunyai range dari 0 sampai 5 V .Dengan memasukkan rumus (3.1) dan apabila m
sama dengan penguatan maka dapat dihitung besarnya penguatan sebagai berikut:
1 2
1 2
x x
y y m
− −
= ………(3.1)
17 , 4
7 , 2 9 , 3
0 5
= − − =
menghitung gain dan Vx sebagai berikut:
0 = 4,17 . 2,7 + Vo
Vo = - 11,259 V
Sehingga besarnya nilai Vout setelah keluar dari pengkondisi sinyal adalah
Vout = 4,17 .
[
Vin + ⎟⎠ ⎞ ⎜
⎝ ⎛−
17 , 4
259 ,
11
]
= 4,17 .
[
Vin – 2,7V]
Gain = 4,17
Vin = Vout sensor
Vx = 2,7 ( V pengurangan )
Digunakan rancangan penguat diferensial
R1 = 10k
R2 = R1 . Gain
= 10k.4,17
= 41,7K ohm = 56 k ohm
Dari perhitungan dapat diperoleh gambaran perancangan pengkondisi sinyal yang
digunakan untuk pengukuran keinggian air sebagai berikut:
Sama seperti pada pengkondisi sinyal untuk suhu D1 merupakan dioda Zener 5,1 V
yang digunakan untuk pengaman pada port input mikrokontroler.
Batas bawah pengkondisi sinyal bila disimulasikan dengan menggunakan microcap 9
adalah sebagai berikut:
Gambar 3.12 Simulasi batas bawah level
Gambar 3.13 Pengkondisi sinyal batas atas sensor level
Hasil perhitungan dan simulasi dapat diketahui bahwa setiap batas bawah sensor tidak
mencapai angka 0 V namun masih dalam orde mili volt dengan nilai masih di bawah 20
mV jika digunakan ADC dengan resolusi 8 bit adalah:
Vout = 256
5
= 19, 5 m V untuk setiap perubuhan 1 bit
Besar nilai batas bawah masing – masing sensor masih dianggap sama dengan 0 Volt.
Dirancang untuk mensinkronisasi PWM keluaran mikrokontroler yang
merupakan output hasil dari perhitungan dengan gelombang AC yang digunakan untuk
mengendalikan aktuator. Bekerja berdasarkan prinsip komparator .
Gambar 3.14 ZCD
D2 merupakan dioda zener digunakan untuk membatasi tegangan keluran menjadi 5,1 V
sehingga dapat langsung diolah mikrontroler. Gambar 3.15 merupakan hasil simulasi dari
ZCD .saat tegangan AC positif output ZCD akan menghasilkan tegangan positif dan pada
saat tegangan AC negatif output ZCD akan berada pada tegangan nol. ZCD . ZCD terjadi
pada saat transisi turun dan transisi naik komparator.
Gambar 3.15