BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan dijelaskan mengenai pengujian algoritma dan pengukuran pada output dari robot yang telah dibuat dan analisis tentang kinerja algoritma.
4.1.Contoh Perhitungan
Karena semua perhitungan terjadi dalam algoritma pada kontroler maka proses perhitungan tidak terlihat, maka berikut adalah contoh perhitungan kinematika balik. Setiap kasus rantai kinematika balik memiliki cara penyelesaian masing-masing, dan contoh perhitungan ini merupakan contoh perhitungan untuk konfigurasi robot Kondo KHR-3HV R2C. Hasil perhitungan dibulatkan menjadi bilangan bulat terdekat.
Berikut akan dibahas contoh kasus pada perhitungan kinematika balik. Pertama yang harus diketahui adalah sebagai berikut :
Diketahui :
Dari end-effector tersebut nantinya akan didapat besar sudut untuk masing-masing servo.
Jawaban :
Ɵ1 sudah dapat diketahui dari nilai heading yaitu 45o, kemudian mencari Rxz
dengan cara pitagoras, sudut B dengan arctan2, panjang az dan ax menggunakan
trigonometri aturan cos dan sin. Berikut adalah contoh perhitungan langkah pertama:
Untuk mencari sudut pergerakan di sumbu x, maka harus diketahui panjang
Tahap terakhir dari perhitungan kinematika balik. Pada tahap ini akan didapat nilai-nilai sudut pembentuk gerakan lutut robot. sA dicari menggunakan trigonometri, sB dan sC dicari menggunakan trigonometri segitiga sembarang. Kemudian nilai Ɵ3, Ɵ4, dan Ɵ5
dapat ditemukan.
� = √( − − × ) + − ×
= √ − − × . + . − × .
Maka dari posisi end-effector didapat besar masing-masing sudut yaitu Ɵ1 = �,Ɵ2 = . �, Ɵ3 = . �, Ɵ4 = . �Ɵ5 = . �, dan Ɵ6 = . �.
4.2. Pengujian dan Pengukuran
Pengujian dilakukan untuk melihat hasil dari algoritma apakah sudah sesuai dengan konfigurasi, dan pengukuran dilakukan dengan tujuan membandingkan apakah hasil algoritma dengan output pada robot berhasil atau tidak. Berhasil disini berarti bahwa hasil perhitungan algoritma dan pengukuran dengan alat ukur memiliki hasil yang tidak jauh berbeda.
Pengujian dan pengukuran akan berisi beberapa bagian, yaitu pengujian dan pengukuran pada bidang X-Y, pada bidang Y-Z, padang bidang X-Z, dan konfigurasi ruang X-Y-Z dan dilakukan sebanyak empat kali masing-masing terdiri dari dua kali tanpa heading dan dua kali menggunakan heading. Percobaan dilakukan dengan konfigurasi acak untuk melihat hasil agar dapat diketahui kesalahan pada algoritma atau ralat pada masing-masing servo.
Untuk pengujian akan dilakukan dengan cara mencetak hasil sudut dari setiap perhitungan, dan untuk pengukuran akan dilakukan pembacaan alat ukur pada jarak gerakan kaki dari posisi standby menuju pada posisi final serta sudut yang terbentuk pada masing-masing servo. Berikut adalah alat ukur yang digunakan dalam pengukuran :
Gambar 4.1 Busur Derajat
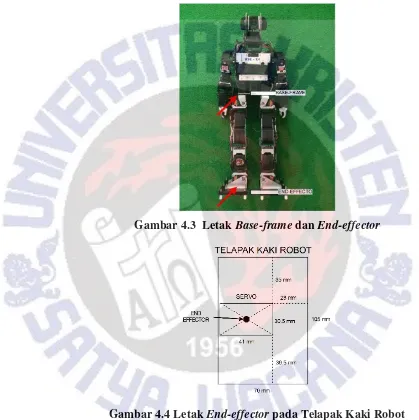
Dibutuhkan acuan (Gambar 4.3) dalam mengukur posisi akhir robot dan pergerakan servo agar tidak terjadi perbedaan pendapat. Base-frame berada pada motor servo pangkal paha yaitu servo 0 dan servo 1, end-effector berada pada tengah telapak kaki kanan atau kaki kiri robot.
Gambar 4.3 Letak Base-frame dan End-effector
Gambar 4.4 Letak End-effector pada Telapak Kaki Robot
Gambar 4.3 dan Gambar 4.4 menunjukkan letak acuan pengukuran untuk mengukur posisi final, selanjutnya pengukuran sudut untuk melihat perubahan putaran servo. Pada frame robot Kondo KHR-3HV sudah terdapat titik-titik referensi yang dapat menunjukkan putaran 0o pada servo, dan perubahan yang terjadi.
Gambar 4.5 Titik Referensi Sudut Robot pada Servo
Gambar 4.6 Sudut yang Terbentuk
Pada frame berwarna putih atau silver terdapat titik hitam yang menunjukan titik 0o pada servo atau servo belum bergerak, sedangkan pada frame berwarna merupakan tempat di mana servo berputar dan terdapat tonjolan yang akan berputar menjauhi titik hitam pada frame putih apabila servo bergerak. Titik pusat sudut berada pada baut karena letak motor servo berputar tepat di bawah baut. Titik pusat sudut pada busur akan diletakkan di atas baut dan akan diukur perubahan sudut yang terjadi pada titik referensi tersebut.
Berikut adalah gambar dari contoh pergerakan kaki robot terhadap masing-masing sumbu :
Gambar 4.7 Gerakan Kaki ke Depan (sumbu x)
Gambar 4.8 Gerakan Kaki ke Atas (sumbu y)
4.2.1. Pengujian Servo Tanpa Beban
Berikut adalah pengujian perputaran pada servo tanpa menggunakan beban atau frame. Pengujian ini dilakukan untuk melihat perputaran servo sudah benar sesuai dengan nilai sudut yang diinginkan.
Gambar 4.10 Gambar Servo
Gambar 4.10 menunjukan titik referensi 0o pada servo, dan Gambar 4.11 menunjukkan pengukuran yang memperlihatkan 0o pada busur derajat.
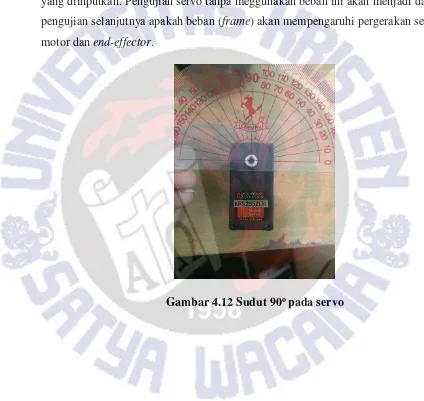
Berikut adalah pengujian dengan sudut input servo sebesar 90o (Gambar 4.12). dapat dilihat bahwa titik hitam pada motor servo berhimpitan dengan garis busur 90o. Hal ini menandakan bahwa perputaran servo sudah sesuai dengan besar sudut yang diinputkan. Pengujian servo tanpa meggunakan beban ini akan menjadi dasar pengujian selanjutnya apakah beban (frame) akan mempengaruhi pergerakan servo motor dan end-effector.
4.2.2. Pengujian Sudut Kinematika Balik
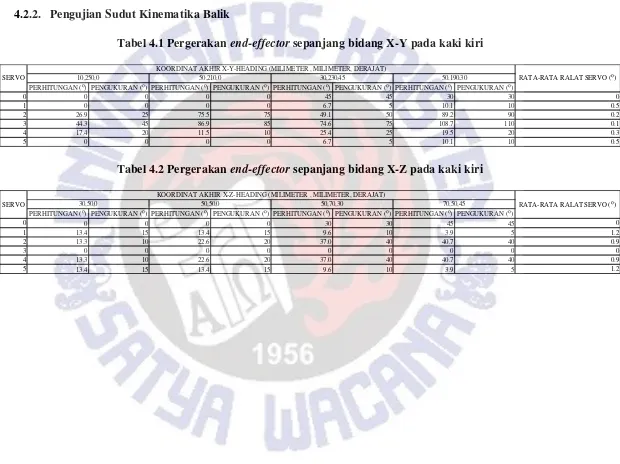
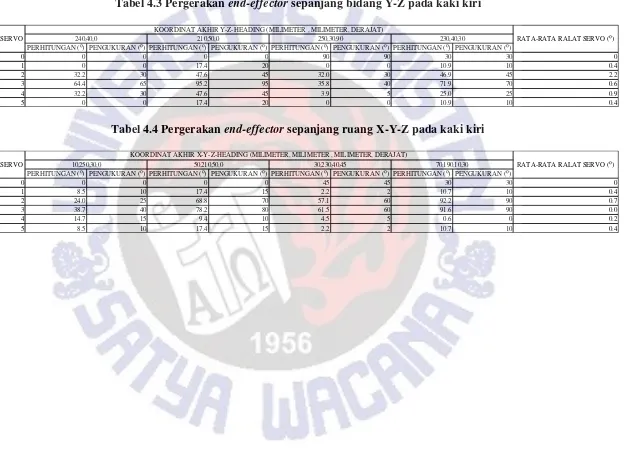
Tabel 4.1 Pergerakan end-effector sepanjang bidang X-Y pada kaki kiri
Tabel 4.2 Pergerakan end-effector sepanjang bidang X-Z pada kaki kiri
PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰)
KOORDINAT AKHIR X-Y-HEADING (MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
10,250,0 50,210,0 30,230,45 50,190,30
KOORDINAT AKHIR X-Z-HEADING (MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
Tabel 4.3 Pergerakan end-effector sepanjang bidang Y-Z pada kaki kiri
Tabel 4.4 Pergerakan end-effector sepanjang ruang X-Y-Z pada kaki kiri
PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰)
KOORDINAT AKHIR Y-Z-HEADING (MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
240,40,0 210,50,0 250,30,90 230,40,30
KOORDINAT AKHIR X-Y-Z-HEADING (MILIMETER, MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
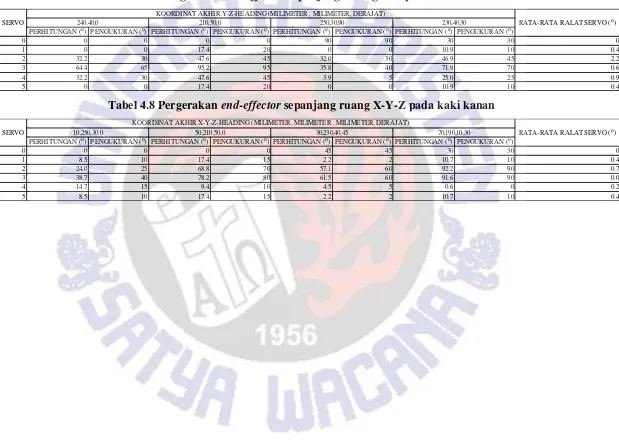
Tabel 4.5 Pergerakan end-effector sepanjang bidang X-Y pada kaki kanan
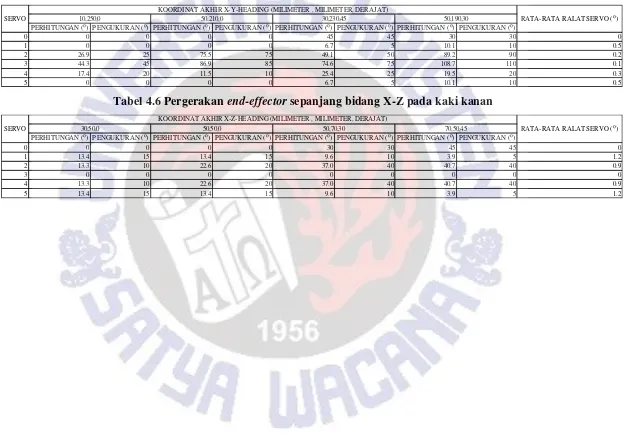
Tabel 4.6 Pergerakan end-effector sepanjang bidang X-Z pada kaki kanan
PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰)
KOORDINAT AKHIR X-Y-HEADING (MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
10,250,0 50,210,0 30,230,45 50,190,30
KOORDINAT AKHIR X-Z-HEADING (MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
Tabel 4.7 Pergerakan end-effector sepanjang bidang Y-Z pada kaki kanan
Tabel 4.8 Pergerakan end-effector sepanjang ruang X-Y-Z pada kaki kanan
PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰) PERHITUNGAN (⁰) PENGUKURAN (⁰)
KOORDINAT AKHIR Y-Z-HEADING (MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
240,40,0 210,50,0 250,30,90 230,40,30
KOORDINAT AKHIR X-Y-Z-HEADING (MILIMETER, MILIMETER , MILIMETER, DERAJAT)
RATA-RATA RALAT SERVO (⁰)
4.2.3. Pengujian Posisi Final Kinematika Balik
Tabel 4.9 Pengukuran end-effector pada kaki kanan
KE-4.3 Analisis Pengujian dan Pengukuran
Hasil pengukuran sedikit berbeda dengan hasil perhitungan, hal ini dapat dikarenakan oleh beberapa alasan sebagai berikut :
1. Penggunaan busur derajat yang berskala 10o. Sehingga nilai perhitungan dengan skala 1o tidak dapat terukur. Hasil pengukuran pada kaki kiri dan kanan sama karena rumus yang digunakan sama.
2. Dengan pengujian servo tanpa menggunakan beban yang memperlihatkan bahwa servo bergerak sesuai sudut yang diinputkan, dan pengujian servo yang sudah terpasang pada kaki memperlihatkan perbedaan besar sudut yang terbentuk antara hasil algoritma dengan hasil pengukuran dapat disebabkan oleh beban (frame) yang terpasang pada kaki robot.