viii
INTISARI
Sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call merupakan pengaplikasian terhadap perkembangan teknologi komunikasi bergerak. Robot ini dibangun untuk dapat memonitor suatu lokasi serta dapat memberikan informasi visual kepada user melalui layanan video call secara otomatis dan real time.
Sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call ini gagal diimplementasikan. Hal ini disebabkan karena user tidak dapat mengirimkan sinyal DTMF ke ponsel sistem saat komunikasi video call pada jaringan GSM 3G. Oleh karena itu, untuk mengatasi masalah tersebut digunakanlah aplikasi skype. Aplikasi skype dapat mengirim dan menerima sinyal DTMF saat komunikasi video call. Sistem pengendalian robot yang dibuat dengan aplikasi skype ini menerapkan komunikasi satu arah yaitu dari sisi user yang bertindak sebagai pengendali. Sistem ini akan bekerja apabila user melakukan panggilan video ke ponsel sistem dengan aplikasi skype. Pada saat komunikasi video call antara notebook user dengan ponsel sistem, sinyal DTMF akan dikirimkan. Sinyal DTMF yang dikirim tersebut kemudian diterima oleh DTMF decoder untuk diterjemahkan ke dalam data biner. Data biner tersebut kemudian dikirim ke mikrokontroler untuk mengerakkan robot bergerak maju, bergerak ke kiri, berhenti, bergerak ke kanan, dan bergerak mundur.
Sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call dengan aplikasi skype telah berhasil diimplementasikan dan dapat bekerja dengan baik. User dapat mengendalikan arah pergerakan robot dari jarak jauh. Robot yang dikendalikan oleh user dapat memberikan gambar visual melalui layanan video call pada aplikasi skype.
ix
ABSTRACT
Robot remote control system using DTMF signals on video call service is an application to the development of mobile communication technology. This robot constructed to be able to monitor the location and can provide visual information to the user via video call service automatically and real time.
Robot remote control system using DTMF signals on video call service failed implemented. This is because the user can not send DTMF signals to mobile phone system when communication video call on GSM 3G network. Therefore, to overcome this problem use skype application. Skype application can send and receive DTMF signals when communication video call. Robot remote control system with the skype application to implement one direction, from user side that act as controller. System will work if the user make video calls to mobile phone systems by skype application. In the event of communication video call between notebook user with a mobile phone system, DTMF signals will be sent. DTMF signals is then receive by the DTMF decoder to translate into binary data. The binary data is sent to the microcontroller to mobilize the robot move forward, move to the left, stop, move to the right, and move backward.
Robot remote control system using DTMF signals on video call service with the skype application has been implemented and can work well. User can control the direction of movement of the robot remotely. The robot is controlled by the user can provide visual images by the video call service on skype application.
i
TUGAS AKHIR
SISTEM PENGENDALIAN ROBOT JARAK JAUH
MENGGUNAKAN SINYAL DTMF PADA LAYANAN
VIDEO CALL
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
YOHANES GIOVANNI SETIADY TJIU NIM : 095114012
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
ROBOT REMOTE CONTROL SYSTEM USING DTMF
SIGNALS ON VIDEO CALL SERVICES
Presented as Partial Fullfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
YOHANES GIOVANNI SETIADY TJIU NIM : 095114012
ELECTRICAL ENGINEERING STUDY PROGRAM
FACULTY OF SCIENCE AND TECHNOLOGY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTO
MOTO :
Rahasia terbesar dalam hidup : Melewati hari ini dengan penuh
makna. Makna tentang cinta, ilmu, dan iman. Dengan cinta hidup
menjadi indah. Dengan ilmu hidup menjadi mudah dan dengan iman
hidup menjadi terarah.
Skripsi ini kupersembahkan untuk…..
Yesus Kristus pembimbingku yang setia
Papa dan Mama tercinta
viii
INTISARI
Sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call merupakan pengaplikasian terhadap perkembangan teknologi komunikasi bergerak. Robot ini dibangun untuk dapat memonitor suatu lokasi serta dapat memberikan informasi visual kepada user melalui layanan video call secara otomatis dan real time.
Sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call ini gagal diimplementasikan. Hal ini disebabkan karena user tidak dapat mengirimkan sinyal DTMF ke ponsel sistem saat komunikasi video call pada jaringan GSM 3G. Oleh karena itu, untuk mengatasi masalah tersebut digunakanlah aplikasi skype. Aplikasi skype dapat mengirim dan menerima sinyal DTMF saat komunikasi video call. Sistem pengendalian robot yang dibuat dengan aplikasi skype ini menerapkan komunikasi satu arah yaitu dari sisi user yang bertindak sebagai pengendali. Sistem ini akan bekerja apabila user melakukan panggilan video ke ponsel sistem dengan aplikasi skype. Pada saat komunikasi video call antara notebook user dengan ponsel sistem, sinyal DTMF akan dikirimkan. Sinyal DTMF yang dikirim tersebut kemudian diterima oleh DTMF decoder untuk diterjemahkan ke dalam data biner. Data biner tersebut kemudian dikirim ke mikrokontroler untuk mengerakkan robot bergerak maju, bergerak ke kiri, berhenti, bergerak ke kanan, dan bergerak mundur.
Sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call dengan aplikasi skype telah berhasil diimplementasikan dan dapat bekerja dengan baik. User dapat mengendalikan arah pergerakan robot dari jarak jauh. Robot yang dikendalikan oleh user dapat memberikan gambar visual melalui layanan video call pada aplikasi skype.
ix
ABSTRACT
Robot remote control system using DTMF signals on video call service is an application to the development of mobile communication technology. This robot constructed to be able to monitor the location and can provide visual information to the user via video call service automatically and real time.
Robot remote control system using DTMF signals on video call service failed implemented. This is because the user can not send DTMF signals to mobile phone system when communication video call on GSM 3G network. Therefore, to overcome this problem use skype application. Skype application can send and receive DTMF signals when communication video call. Robot remote control system with the skype application to implement one direction, from user side that act as controller. System will work if the user make video calls to mobile phone systems by skype application. In the event of communication video call between notebook user with a mobile phone system, DTMF signals will be sent. DTMF signals is then receive by the DTMF decoder to translate into binary data. The binary data is sent to the microcontroller to mobilize the robot move forward, move to the left, stop, move to the right, and move backward.
Robot remote control system using DTMF signals on video call service with the skype application has been implemented and can work well. User can control the direction of movement of the robot remotely. The robot is controlled by the user can provide visual images by the video call service on skype application.
x
KATA PENGANTAR
Puji dan syukur penulis ucapkan terima kasih kepada Tuhan Yang Maha Esa karena atas berkat dan karunia-Nya sehingga penulis dapat menyelesaikan laporan tugas akhir yang berjudul “Sistem Pengendalian Robot Jarak Jauh Menggunakan Sinyal DTMF Pada Layanan Video Call”. Laporan tugas akhir ini disusun sebagai persyaratan mahasiswa memperoleh gelar sarjana.
Dalam penulisan tugas akhir ini banyak sekali kesulitan yang penulis temui dan banyak pula bantuan dan bimbingan serta dorongan dari berbagi pihak, baik materil maupun moril. Maka dengan selesainya penulisan tugas akhir ini penulis mengucapkan
terima kasih yang sedalam-dalamnya untuk seluruh pihak yang membantu. Pada kesempatan ini penulis ingin berterima kasih kepada :
1. Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta. 2. Bapak Petrus Setyo Prabowo, S.T., M.T. selaku Ketua Program Studi Teknik
Elektro Universitas Sanata Dharma Yogyakarta.
3. Bapak Damar Widjaya, S.T., M.T. selaku bimbingan kolokium dan Ibu Wiwien Widyastuti, S.T., M.T. selaku bimbingan pendadaran yang dengan segala kesabaran hati memberikan pengarahan serta membimbing penulis dalam menyelesaikan tugas akhir ini.
4. Kepada seluruh dosen dan staf jurusan Teknik Elektro yang telah memberikan banyak ilmu, arahan, dan masukan selama masa perkuliahan berlangsung serta memberikan pelayanan yang terbaik bagi penulis selaku mahasiswa.
5. Seluruh teman-teman seperjuangan angkatan 2009 Teknik Elektro yang telah mendukung penulis dalam menyelesaikan tugas akhir ini.
6. Kedua orang tua tersayang dan tercinta yang selalu memberikan semangat serta doa yang tiada henti-hentinya kepada penulis untuk menyelesaikan tugas akhir ini. 7. Keluarga besar Tjiu dan Lie yang selalu memberikan semangat dan dukungan
serta doa dalam menyelesaikan tugas akhir ini.
xii
DAFTAR ISI
HALAMAN JUDUL ...i
HALAMAN PERSETUJUAN ...iii
HALAMAN PENGESAHAN ...iv
PERNYATAAN KEASLIAN KARYA ...v
HALAMAN PERSEMBAHAN DAN MOTO HIDUP ...vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ...vii
INTISARI ...viii
ABSTRACT ...ix
KATA PENGANTAR ...x
DAFTAR ISI ...xii
DAFTAR GAMBAR ...xv
DAFTAR TABEL ...xvii
BAB I PENDAHULUAN ...1
1.1. Latar Belakang ...1
1.2. Tujuan dan Manfaat Penelitian ...2
1.3. Batasan Masalah ...2
1.4. Metode Penelitian ...3
1.5. Sistematika Penulisan ...4
BAB II DASAR TEORI ...5
2.1. Telepon Seluler ...5
2.2. GSM ...5
2.2.1. Mobile Station ...6
2.2.2. Base Station Subsystem ...7
2.2.3. Switching Subsystem ...7
2.2.4. Operation and Support Subsystem ...8
xiii
2.3.1. Video Call ...9
2.4. Mikrokontroler ATMega8538 ...9
2.4.1. Arsitektur ATMega8535 ...10
2.4.2. Konfigurasi ATMega8535 ...10
2.4.3. Memori Data ...12
2.4.4. Memori Program ...12
2.4.5. Timer ATMega8535 ...12
2.4.5.1. Timer/Counter1 ...12
2.5. Dual Tone Multi Frequency ...13
2.6. DTMF Decoder CM8870 ...13
2.7. Pulse Width Modulation ...15
2.8. Motor DC ...15
2.8.1. Prinsip Kerja Motor DC ...16
2.9. Driver Motor DC L293D ...17
2.10. LED ...18
2.11. Bascom-AVR ...19
BAB III RANCANGAN PENELITIAN ...20
3.1. Proses Kerja Sistem Pengendalian Robot ...20
3.2. Kebutuhan Perangkat Keras ...21
3.3. Kebutuhan Perangkat Lunak ...22
3.4. Perancangan Alat ...22
3.4.1. Perancangan Konstruksi Robot ...22
3.4.2. Perancangan Rangkaian DTMF Decoder ...23
3.4.3. Perancangan Rangkaian Minimum Sistem ATMega8535 ...24
3.4.4. Perancangan Rangkaian Penggerak Motor DC ...27
3.5. Perancangan Program ...28
3.5.1. Diagram Alir Pergerakan Robot Menggunakan Ponsel ...28
BAB IV HASIL DAN PEMBAHASAN ...30
4.1. Hasil Implementasi Alat ...30
4.2. Hasil Pengujian DTMF Decoder dan Sinyal DTMF ...31
xiv
4.4. Hasil Pengujian Dengan Aplikasi Skype ...37
4.4.1. Pengujian Keluaran DTMF Decoder Saat Video Call ...37
4.4.2. Pengujian Pergerakan Robot Saat Video Call ...40
4.4.3. Pengujian Hasil Gambar Video Call Saat Robot Bergerak ...42
4.5. Listing Program ...43
BAB V KESIMPULAN DAN SARAN ...45
5.1. Kesimpulan ...45
5.2. Saran ...45
DAFTAR PUSTAKA ...46
xv
DAFTAR GAMBAR
Gambar 2.1. Elemen jaringan GSM ...6
Gambar 2.2. Konfigurasi pin mikrokontroler ATMega8535 ...11
Gambar 2.3. Rangkaian DTMF decoder CM8870 ...14
Gambar 2.4. Gelombang sinyal PWM ...15
Gambar 2.5. Konstruksi motor DC ...16
Gambar 2.6. Motor DC ...17
Gambar 2.7. Konstruksi pin L293D ...17
Gambar 2.8. Rangkaian LED ...18
Gambar 2.9. Interface Bascom-AVR ...19
Gambar 3.1. Diagram blok sistem pengendalian robot ...20
Gambar 3.2. Konstruksi robot ...22
Gambar 3.3. Rangkaian DTMF decoder ...23
Gambar 3.4. Rangkaian osilator ...25
Gambar 3.5. Rangkaian reset ...25
Gambar 3.6. Rangkaian minimum sistem ATMega8535 ...26
Gambar 3.7. Koneksi pin IC L293D dengan mikrokontroler ...27
Gambar 3.8. Flowchart pergerakan robot menggunakan ponsel ...29
Gambar 4.1. Hasil implementasi sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call ...31
Gambar 4.2. Hasil pengujian keluaran DTMF decoder ...33
Gambar 4.3. Hasil pengujian sinyal DTMF saat video call ...34
Gambar 4.4. Blok diagram sistem pengendalian robot jarak jauh dengan aplikasi skype ...35
Gambar 4.5. Hasil implementasi sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call dengan aplikasi skype ...36
xvi
xvii
DAFTAR TABEL
Tabel 2.1. Frekuensi nada DTMF ...13
Tabel 2.2. Fungsi icon pada interface Bascom-AVR ...19
Tabel 3.1. Output dari rangkaian DTMF decoder ...23
Tabel 3.2. Penggunaan port mikrokontroler ATMega8535 ...27
Tabel 3.3. Kondisi putaran motor DC terhadap pergerakan robot ...28
Tabel 4.1. Hasil pengujian keluaran DTMF decoder saat video call ...32
Tabel 4.2. Hasil pengujian sinyal DTMF pada berbagai jenis SIM card GSM ...34
Tabel 4.3. Hasil pengujian keluaran DTMF decoder saat video call dengan aplikasi skype ...37
Tabel 4.4. Perbandingan hasil perancangan dan pengujian pergerakan robot saat video call dengan aplikasi skype ...40
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Sistem komunikasi bergerak diyakini memiliki peranan yang penting dalam memenuhi kebutuhan telekomunikasi [1]. Sistem komunikasi bergerak generasi ketiga (3G), seperti Universal Mobile Telecommunication System (UMTS) menyediakan berbagai macam fasilitas dan layanan bagi para pelanggannya. Hal ini disebabkan semakin meningkatnya kebutuhan masyarakat untuk berkomunikasi secara bergerak. Aplikasi dan layanan tersebut antara lain adalah aplikasi multimedia, akses internet, transfer data kecepatan tinggi, serta aplikasi interaktif yang bersifat real time, seperti video call dan mobile TV.
Aplikasi video call dapat digunakan sebagai sarana komunikasi real time khususnya untuk dunia bisnis, kesehatan, dan pendidikan [2]. Aplikasi video call untuk dunia bisnis, biasanya disebut video conference, yaitu semacam video call tetapi dalam skala lebih besar. Dalam dunia kesehatan, aplikasi ini diterapkan untuk penanganan medis dari jarak jauh untuk komunikasi tatap muka dengan pasien. Untuk dunia pendidikan, aplikasi video call ini digunakan untuk tatap muka antar guru maupun siswa, untuk berdiskusi, bereksperimen, dan bereksplorasi, baik dalam maupun luar negeri tanpa adanya batasan waktu dan tempat.
Dengan dimungkinkannya pengiriman data berupa gambar dan suara (voice) secara bersamaan, layanan multimedia dapat juga digunakan sebagai Closed Circuit Television (CCTV) yang dapat dilakukan dari jarak jauh untuk memonitor suatu lokasi. Proses monitor dilakukan menggunakan aplikasi video call dari telepon seluler (ponsel) pada jaringan GSM 3G.
pada penelitian kedua yaitu pengiriman sinyal DTMF yang tidak dapat dilakukan dari ponsel user serta ponsel sistem yang tidak dapat secara langsung memberikan gambar visual saat user melakukan panggilan video. Berdasarkan pertimbangan di atas, penulis ingin mengembangkan penelitian-penelitian terdahulu sekaligus membuat suatu sistem pengendalian jarak jauh yang dapat memonitor kondisi suatu lokasi, khususnya yang dilakukan oleh robot beroda. Robot tersebut akan memberikan informasi visual kepada user melalui layanan video call secara otomatis dan realtime. Sistem pengendalian jarak jauh yang akan dibuat diberi judul “Sistem Pengendalian Robot Jarak Jauh Menggunakan Sinyal DTMF Pada Layanan Video Call”.
1.2.
Tujuan dan Manfaat Penelitian
Tujuan penelitian ini adalah menghasilkan suatu sistem pengendalian robot dengan media ponsel yang memanfaatkan layanan video call pada jaringan GSM 3G.
Manfaat yang ingin di capai penulis dalam penelitian ini adalah : 1. User dapat memonitor kondisi di sekitar robot secara langsung. 2. Mengembangkan sistem kontrol pada robot yang sudah ada saat ini.
3. Memberikan sumbangan bagi perkembangan ilmu pengetahuan khususnya dalam bidang pengendalian jarak jauh dengan video call.
1.3.
Batasan Masalah
Batasan masalah dalam penelitian ini adalah:
1. Pengendalian robot oleh user dilakukan melalui layanan video call pada jaringan GSM 3G dan pengiriman Dual Tone Multi Frequency (DTMF).
2. Spesifikasi ponsel yang digunakan oleh user dan robot adalah ponsel 3G.
3. Sistem ini hanya berkomunikasi satu arah saja yaitu dari sisi user sebagai pengendali robot.
1.4.
Metode Penelitian
Pembuatan tugas akhir ini terbagi menjadi beberapa tahap pengerjaan, yang tertera sebagai berikut:
1. Studi literatur
Dalam studi literatur ini, pengumpulan data-data perangkat lunak dan perangkat keras dilakukan melalui referensi-referensi yang telah ada, di antaranya referensi mengenai mikrokontroler, DTMF decoder, IC L293D, Bascom- AVR serta komponen-komponen yang digunakan dalam pembuatan tugas akhir ini.
2. Perancangan sistem
Perancangan sistem meliputi kejelasan konsep dari alat, tujuan, input, dan output dari robot.
3. Perancangan perangkat keras dan perangkat lunak
Perancangan perangkat keras meliputi: perancangan rangkaian minimum sistem ATMega8535, rangkaian DTMF decoder, dan rangkaian driver motor DC. Perancangan perangkat lunak meliputi: perancangan kode perintah pada robot dan pembuatan flowchart.
4. Implementasi
Perangkat keras dan perangkat lunak akan dibuat pada tahap ini. Pembuatan perangkat keras meliputi: pembuatan rangkaian minimum sistem ATMega8535, rangkaian DTMF decoder, dan rangkaian driver motor DC. Pembuatan perangkat lunak meliputi: pembuatan program menggunakan Bascom-AVR serta kebutuhan downloader untuk menyalin program ke mikrokontroler.
5. Uji coba dan analisa sistem
Hasil dari pembuatan perangkat keras dan perangkat lunak diintegrasikan, sehingga terbentuk sebuah sistem yang dapat bekerjasama, kemudian sistem akan diuji secara keseluruhan. Pengujian perangkat keras berupa uji coba pada mikrokontroler, DTMF decoder CM8870, dan IC L293D. Pengujian mikrokontroler ini termasuk bagian pengujian perangkat lunak. Dari hasil pengujian tersebut penulis melalukan analisa dan memberikan kesimpulan.
6. Membuat laporan
1.5.
Sistematika Penulisan
Dalam penyusunan laporan tugas akhir ini akan diuraikan dalam bentuk bab, dan masing-masing bab akan dipaparkan dalam beberapa sub bab, diantaranya:
BAB I : PENDAHULUAN
Dalam bab ini akan menjelaskan latar belakang, tujuan dan manfaat, batasan masalah, metode penelitian dan sistematika penulisan tugas akhir.
BAB II : DASAR TEORI
Dalam bab ini akan membahas dan menjelaskan mengenai dasar teoritis yang menjadi landasan dan mendukung pelaksanaan penulisan tugas akhir.
BAB III : RANCANGAN PENELITIAN
Dalam bab ini akan membahas tentang alur rancangan sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call.
BAB IV : HASIL DAN PEMBAHASAN
Dalam bab ini akan membahas hasil rancangan penelitian dan pembahasan dari data yang diperoleh.
BAB V : KESIMPULAN DAN SARAN
5
BAB II
DASAR TEORI
2.1.
Telepon Seluler
Telepon seluler atau yang sering disebut ponsel merupakan alat komunikasi dengan teknologi yang lebih tinggi dibandingkan dengan telepon rumah Public Switch Telephone Network (PSTN) [5]. Hal ini dikarenakan ponsel memiliki fasilitas-fasilitas yang tidak terdapat pada PSTN seperti, Short Message Service (SMS), Multimedia Message Service (MMS), General Packet Radio Service (GPRS), ringtone, radio, kamera, video call dan lain sebagainya. Teknologi yang digunakan sistem seluler sendiri beragam, ada AMPS, GSM, dan CDMA. Sistem ini menyediakan komunikasi wireless bagi pelanggan (yang berlokasi dalam jangkauan radio sistem) untuk berhubungan dengan pelanggan seluler lain atau dengan pelanggan.
2.2.
GSM
Global System for Mobile Communications (GSM) muncul pada pertengahan 1991 dan dijadikan standar telekomunikasi seluler untuk seluruh Eropa oleh European Telecomunication Standard Institute (ETSI) [4]. Pengoperasian GSM secara komersil dimulai pada awal kuartal terakhir 1992. GSM merupakan teknologi yang kompleks dan butuh pengajian yang mendalam untuk bisa dijadikan standar. Standar type approval untuk ponsel disepakati dengan mempertimbangkan dan memasukkan puluhan item pengujian dalam memproduksi GSM.
GSM telah mengantisipasi perkembangan jumlah penggunanya yang sangat maju dan arah layanan per area yang tinggi. GSM mengatasi perkembangan tersebut dengan Digital Cellular System (DCS) pada alokasi frekuensi 1800 MHz. Pada frekuensi tersebut, kapasitas pelanggan yang semakin besar per satuan sel akan dicapai. Selain itu, DCS akan dapat menurunkan kekuatan daya pancar ponsel dengan luas sel yang semakin kecil, sehingga bahaya radiasi yang timbul dapat dikurangi. Sel merupakan unit dasar sistem seluler. Setiap sel memiliki sebuah base station yang terdiri dari tower dan bangunan kecil berisi perangkat radio.
Phone System (AMPS) dan Nordic Mobile Telephone (NMT). Namun dengan hadir dan dijadikan standar sistem komunikasi seluler membuat sistem analog perlahan menghilang, tidak hanya di Indonesia, tetapi juga di Eropa. Pengguna GSM pun semakin lama semakin bertambah. Akhirnya GSM tumbuh dan berkembang sebagai sistem telekomunikasi seluler yang paling banyak digunakan di seluruh dunia.
Jaringan GSM dibagi menjadi 4 subsistem utama: Mobile Station (MS), Base Station Subsystem (BSS), Switching Subsystem (SS), dan Operation and Support Subsystem (OSS). Secara umum, network element dalam jaringan GSM ditunjukkan pada Gambar 2.1.
Gambar 2.1. Elemen jaringan GSM [1]
2.2.1. Mobile Station
Mobile Station (MS) merupakan peralatan komunikasi bergerak yang dipakai oleh pelanggan agar dapat mengakses jaringan GSM [6]. MS terdiri dari 2 bagian, yaitu:
a. Mobile Equipment
b. Subscriber Identity Module
Subscriber Identity Module (SIM) atau SIM card atau smart card merupakan kartu yang berisi seluruh informasi pelanggan dan beberapa informasi pelayanan. ME tidak dapat digunakan tanpa SIM di dalamnya.
2.2.2. Base Station Subsystem
Base Station Subsystem (BSS) terdiri dari 2 bagian [7], yaitu : a. Base Transceiver Station
Base Transceiver Station (BTS) berfungsi untuk berhubungan langsung dengan MS dan juga berfungsi sebagai pengirim dan penerima sinyal.
b. Base Station Controller
Base Station Controller (BSC) membawahi satu atau lebih BTS serta mengatur trafik yang datang dan pergi dari BSC menuju sentral atau BTS. BSC mengatur sumber radio dalam pemberian frekuensi untuk setiap BTS dan mengatur handover ketika MS melewati batas antar sel.
2.2.3. Switching Subsystem
Switching Subsystem
(SS) berfungsi mengatur komunikasi antar pelanggan GSM
atau antara pelanggan GSM dengan jaringan lain [8]. SS terdiri dari 5 elemen jaringan, yaitu:a. Mobile Switching Center
Mobile Switching Center (MSC) merupakan inti dari jaringan seluler, dimana MSC berperan untuk inter koneksi hubungan pembicaraan, baik antar pelanggan seluler maupun antar seluler dengan jaringan telepon kabel PSTN, ataupun dengan jaringan data.
b. Home Location Register
Home Location Register (HLR) merupakan database yang berisi data pelanggan yang tetap. Data tersebut antara lain, layanan pelanggan, layanan tambahan, serta informasi mengenai lokasi pelanggan yang paling akhir (update).
c. Visitor Location Register
d. Authentication Center
Authentication Center (AuC) merupakan database informasi rahasia yang disimpan dalam bentuk format kode. AuC digunakan untuk mengontrol penggunaan jaringan yang sah dan mencegah semua pelanggan yang melakukan kecurangan.
e. Equipment Identity Registration
Equipment Identity Registration (EIR) merupakan register penyimpan data seluruh MS. EIR berisi IMEI (International Mobile Equipment Identities).
2.2.4. Operation and Support Subsystem
Operation and Support Subsystem (OSS) berfungsi sebagai pusat pengendalian, di antaranya fault management, configuration management, performance management, dan inventory management [7].
2.3.
3G
Teknologi 3G adalah teknologi komunikasi generasi ketiga yang menjadi standar teknologi telepon bergerak (mobile phone), menggantikan 2,5G [9]. Hal ini berdasarkan International Telecommunication Union (ITU) dengan standar IMT-2000. Jaringan 3G memungkinkan operator jaringan untuk menawarkan jangkauan yang lebih luas dengan berbagai fasilitas, di antaranya komunikasi suara nirkabel dalam jangkauan area luas (wide area wireless voice telephony), panggilan video (video call), jalur data kecepatan tinggi nirkabel (broadband wireless data), dan semuanya itu berkerja dalam perangkat bergerak (mobile). Fasilitas tambahan juga meliputi transmisi data HSPA yang mampu untuk mengirim data dengan kecepatan sampai 14,4 Mbps untuk downlink dan 5,8 Mbps untuk uplink.
ITU mendefinisikan 3G sebagai teknologi yang:
1. Mempunyai kecepatan transfer data sebesar 144 Kbps pada pengguna yang bergerak dengan kecepatan 100 km/jam.
2. Mempunyai kecepatan transfer data sebesar 384 Kbps pada pengguna yang berjalan kaki.
Teknologi 3G diperkenalkan pada awalnya adalah untuk tujuan sebagai berikut: 1. Menambah efisiensi dan kapasitas jaringan.
2. Menambah kemampuan jelajah (roaming).
3. Untuk mencapai kecepatan transfer data yang lebih tinggi. 4. Peningkatan kualitas layanan (QoS atau Quality of Service). 5. Mendukung kebutuhan internet bergerak (mobile internet).
Frekuensi yang digunakan oleh teknologi 3G, yaitu: 1. Frekuensi pengiriman (uplink) 1920 – 1980 MHz. 2. Frekuensi penerimaan (downlink) 2110 – 2170 MHz.
2.3.1. Video Call
Layanan yang ditawarkan dari teknologi 3G cukup beragam, baik itu layanan panggilan (call service) maupun layanan data (data service) [10]. Salah satu layanan yang sering digunakan pada teknologi 3G adalah layanan voice call. Namun, di samping layanan voice call, teknologi 3G menawarkan salah satu layanan baru, yaitu layanan video call.
Layanan video call merupakan layanan yang berbasis informasi gambar bergerak (video) dan suara (voice). Dengan layanan ini, penggunanya dapat secara langsung bertatap muka dan berkomunikasi dengan lawan bicaranya melalui layar ponsel. Layanan video call dapat dilakukan jika menggunakan ponsel dengan fitur 3G dan juga memiliki fasilitas kamera.
Adapun kelemahan layanan video call adalah terletak pada sinyal yang berpengaruh pada gambar. Hal ini dikarenakan gambar video pada layanan video call mempunyai ukuran data yang lebih besar dibandingkan suara. Apabila sinyal yang diterima kurang baik, maka gambar video yang dikirim akan lambat dan gambar video yang diterima kurang bagus.
2.4.
Mikrokontroler ATMega8535
Hampir semua instruksi prosesor RISC adalah instruksi dasar, sehingga instruksi-instruksi ini umumnya hanya memerlukan 1 siklus clock. Secara umum, AVR dapat dikelompokkan menjadi 6 kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega, keluarga AT90CAN, keluarga AT90PWM, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya, sedangkan dari segi arsitektur dan instruksi yang digunakan bisa dikatakan hampir sama.
Pada tugas akhir ini, penulis menggunakan salah satu produk ATMEL dari keluarga ATMega yaitu ATMega8535. ATMega8535 yang digunakan ini berfungsi sebagai pengendali keseluruhan sistem robot.
2.4.1. Arsitektur ATMega8535
Mikrokontroler ATMega8535 memiliki arsitektur sebagai berikut [12] : 1. Analog to Digital Converter (ADC) 10 bit sebanyak 8 saluran.
2. Tiga buah saluran Timer/Counter dengan kemampuan pembandingan. 3. Central Processing Unit (CPU) yang terdiri atas 32 buah register. 4. Watchdog Timer dengan osilator internal.
5. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D. 6. Static Random Access Memory (SRAM) sebesar 512 byte.
7. Memory Flash sebesar 8 kbytes dengan kemampuan Read While Write. 8. Unit interupsi internal dan eksternal.
9. Port antarmuka Serial Peripheral Interface (SPI).
10. Electrical Erasable Programmable Read Only Memory (EEPROM) sebesar 512 byte yang dapat diprogram saat operasi.
11. Antarmuka komputer analog.
12. Port Universal Synchronous and Asynchronous serial Receiver and Transmitter (USART) untuk komunikasi serial.
2.4.2. Konfigurasi ATMega8535
Gambar 2.2. Konfigurasi pin mikrokontroler ATMega8535 [14]
Mikrokontroler ATMega8535 memiliki konfigurasi pin sebagai berikut: a. VCC sebagai catu daya positif.
b. GND (Ground) sebagai catu daya negatif. c. Port A (PA7..PA0)
Port A berfungsi sebagai input analog pada ADC. Port A juga berfungsi sebagai suatu port I/O 8 bit dua arah.
d. Port B (PB7..PB0)
Port B adalah suatu port I/O 8 bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
e. Port C (PC7..PC0)
Port C adalah suatu port I/O 8 bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
f. Port D (PD7..PD0)
Port D adalah suatu port I/O 8 bit dua arah dengan resistor internal pull-up (yang dipilih untuk beberapa bit).
g. RESET
Masukan reset. Sebuah reset terjadi jika pin ini diberi logika rendah melebihi periode minimum yang diperlukan.
h. XTAL1
i. XTAL2
Keluaran dari inverting oscillator amplifier.
j. AVCC adalah pin penyedia tegangan untuk port A dan ADC. k. AREF adalah pin referensi analog untuk ADC.
2.4.3. Memori Data
Memori data adalah memori Random Access Memory (RAM) yang digunakan untuk menyimpan data [4]. Memori data yang disediakan dalam mikrokontroler ATMega8535 sebesar 128 byte, meskipun hanya kecil saja tapi untuk banyak keperluan memori dengan kapasitas sebesar itu sudah cukup.
2.4.4. Memori Program
Jenis memori yang dipakai untuk memori program ATMega8535 adalah flash EEPROM, program untuk mengendalikan mikrokontroler diisikan ke memori itu lewat bantuan alat yang dinamakan sebagai ATMega8535 flash EEPROM programmer [4].
2.4.5. Timer ATMega8535
ATMega8535 memiliki tiga modul timer yang terdiri dari dua buah timer/counter 8 bit dan satu buah timer/counter 16 bit [5]. Ketiga modul ini dapat diatur dalam mode yang berbeda-beda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu semua timer/counter juga dapat difungsikan sebagai sumber interupsi.
2.4.5.1.Timer/Counter1
Timer/Counter1 adalah Timer/Counter 16 bit yang memungkinkan program pewaktuan lebih akurat [11]. Fitur-fitur dari Timer/Counter1 pada ATMega8535 adalah sebagai berikut:
a. Desain 16 bit, sehingga memungkinkan untuk menghasilkan PWM 16 bit. b. Dua buah unit pembanding.
c. Dua buah register pembanding. d. Satu buah input capture unit.
g. Periode PWM yang dapat diubah-ubah. h. Sebagai pembangkit frekuensi.
i. Empat buah sumber interupsi (TOV1, OCF1A, OCF1B, dan ICF1).
2.5.
Dual Tone Multi Frequency
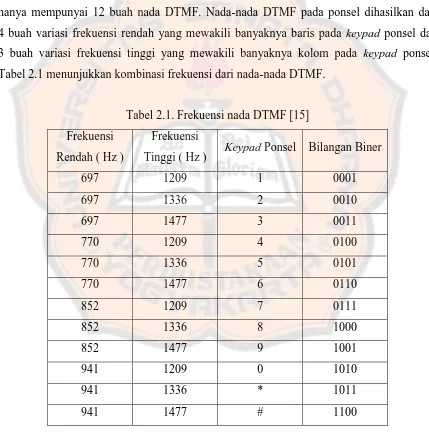
[image:32.595.87.516.249.693.2]DTMF merupakan suatu gelombang frekuensi yang terdiri dari 2 buah frekuensi nada yang berbeda nilainya tetapi dibangkitkan dalam waktu yang bersamaan [15]. Nada DTMF sering digunakan pada sistem alat-alat komunikasi misalnya pada ponsel. Ponsel hanya mempunyai 12 buah nada DTMF. Nada-nada DTMF pada ponsel dihasilkan dari 4 buah variasi frekuensi rendah yang mewakili banyaknya baris pada keypad ponsel dan 3 buah variasi frekuensi tinggi yang mewakili banyaknya kolom pada keypad ponsel. Tabel 2.1 menunjukkan kombinasi frekuensi dari nada-nada DTMF.
Tabel 2.1. Frekuensi nada DTMF [15] Frekuensi
Rendah ( Hz )
Frekuensi
Tinggi ( Hz ) Keypad Ponsel Bilangan Biner
697 1209 1 0001
697 1336 2 0010
697 1477 3 0011
770 1209 4 0100
770 1336 5 0101
770 1477 6 0110
852 1209 7 0111
852 1336 8 1000
852 1477 9 1001
941 1209 0 1010
941 1336 * 1011
941 1477 # 1100
2.6.
DTMF Decoder CM8870
senilai 3,58 MHz. Kristal pada rangkaian DTMF CM8870 berfungsi untuk menentukan waktu minimal utuk mengenali nada yang diterima oleh DTMF. Rangkaian-rangkaian penguat sinyal DTMF dibentuk dengan R1, R2 dan C1 [16].
Rangkaian penerima DTMF CM8870 terdiri atas band split filter yang memisahkan nada high dan low yang diterima dan digital decoder yang akan memeriksa nada high dan low yang diterima, serta durasi dari penerimaan nada. Pemisahan dari nada low group dan high group dapat dilakukan dengan mengaplikasikan sinyal dua tones menuju kedua switch capacitor band pass filter. Setiap filter keluaran diikuti dengan rangkaian switch kapasitor yang akan memperhalus sinyal sebelum menuju limiter. Limiter signal dihasilkan oleh high gain comparator. Comparator tersebut akan mendeteksi low-signal yang tidak diinginkan atau noise.
Delayed Steering Output (STD) merupakan keluaran yang menandakan CM8870 mempunyai nada DTMF baru yang bisa diambil. Saat tidak ada nada DTMF pin
STD = ‘0’. Jika sinyal yang masuk CM8870 mengandung nada DTMF dan nada itu
lamanya melebihi konstanta waktu yang ditentukan oleh C2 dan R3, maka STD akan
menjadi ‘1’ dan memberitahu bahwa ada data di Q1...Q4 (pin 11 sampai pin 14 CM8870)
yang bisa diambil. Sinyal STD akan tetap bertahan = ‘1’ apabila nada DTMF masih ada.
Tone Output Enable (TOE) merupakan masukan untuk mengatur data Q1...Q4.
[image:33.595.111.508.426.732.2]Jika TOE = ‘0’, maka rangkaian keluaran Q1...Q4 akan mengambang (high impedance state), sehingga data tidak bisa diambil. Jika Q1…Q4 tidak digabung dengan jalur data peralatan lainnya, maka pin TOE bisa saja dihubungkan ke ‘1’.
2.7.
Pulse Width Modulation
Salah satu cara untuk mengirimkan informasi analog adalah dengan menggunakan pulsa-pulsa tegangan atau pulsa-pulsa arus [18]. Pada saat modulasi pulsa, sinyal pembawa informasi terdiri dari pulsa-pulsa persegi yang berulang-ulang. Salah satu teknik modulasi pulsa yang digunakan adalah teknik modulasi durasi atau lebar dari waktu tunda positif maupun waktu tunda negatif pulsa-pulsa persegi tersebut. Metode tersebut dikenal dengan nama Pulse Width Modulation (PWM).
[image:34.595.83.518.238.532.2]Sinyal PWM pada umumnya memiliki amplitudo dan frekuensi dasar yang tetap, namun, lebar pulsanya bervariasi [19]. Lebar pulsa PWM berbanding lurus dengan amplitudo sinyal asli yang belum termodulasi (dalam hal ini adalah sinus). Dengan kata lain, frekuensi sinyal PWM adalah konstan namun duty cycle bervariasi (antara 0% hingga 100%). Gambar 2.4 menunjukkan gelombang sinyal PWM.
Gambar 2.4. Gelombang sinyal PWM [4]
Ton adalah waktu saat tegangan keluaran tinggi (high) atau berada pada logika ‘1’. Toff adalah waktu saat tegangan keluaran rendah (low) atau berada pada logika ‘0’. Ttotal adalah jumlah antara Ton dan Toff.
2.8.
Motor DC
a. Bagian stator
Stator adalah bagian yang tetap (tidak bergerak) yang terdiri dari rumah dengan kutub magnet yang dibuat dari pelat-pelat yang dipejalkan dengan gulungan penguat magnet serta tutup rumah.
b. Bagian rotor
[image:35.595.92.514.93.530.2]Rotor adalah bagian yang bergerak yang terdiri dari silinder dibuat dari pelat-pelat yang dipejalkan yang diberi saluran sebagai tempat kumparan yang biasa disebut armatur. Pada armatur terpasang kolektor/komutator yang terdiri dari segmen-segmen yang berhubungan dengan gulungan armatur. Fungsi komutator adalah membalik arah aliran arus listrik yang melalui kumparan armaturnya.
Gambar 2.5. Konstruksi motor DC [20]
2.8.1. Prinsip Kerja Motor DC
Prinsip kerja dari motor DC berdasarkan pada penghantar yang membawa arus kedalam kumparan sehingga kumparan akan menimbulkan medan magnet [20]. Medan magnet ini dibuat sedemikian rupa sehingga keadaannya selalu tolak menolak antara medan magnet yang ditimbulkan stator dan medan magnet yang ditimbulkan rotor sehingga didapat gaya dorong diantara keduanya maka timbulah putaran.
Gambar 2.6. Motor DC [20]
2.9.
Driver Motor DC L293D
[image:36.595.83.526.303.640.2]IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler [21]. Motor DC yang dikontrol dengan driver L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pole. Dalam satu unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri dengan kemampuan mengalirkan arus 1 ampere tiap driver. Gambar 2.7 menunjukkan konstruksi pin L293D.
Gambar 2.7. Kontruksi pin L293D [21]
Berikut ini adalah fungsi dari tiap-tiap pin IC L293D :
a. Pin EN (Enable, EN1,2, EN3,4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
b. Pin in (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC.
d. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol driver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan. e. Pin GND (Ground) adalah jalur yang harus dihubungkan ke ground. Pin GND ini
ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
2.10.
LED
[image:37.595.81.522.226.484.2]Dioda cahaya atau lebih dikenal dengan sebutan Light Emitting Diode (LED) adalah suatu bahan semikonduktor yang dapat mengeluarkan emisi cahaya [22]. Untuk mendapatkan emisi cahaya pada semikonduktor, unsur yang dipakai adalah gallium, arsenic dan phosphorus. Jenis unsur yang berbeda akan menghasilkan cahaya yang berbeda pula. Gambar 2.8 menunjukkan pemberian prasikap tegangan pada LED.
Gambar 2.8. Rangkaian LED [22]
LED memiliki berbagai macam warna, di antaranya warna merah, kuning, dan hijau. Selain warna, dalam memilih LED perlu memperhatikan tegangan kerja, arus maksimum, dan disipasi daya. Cahaya pada LED berbanding lurus dengan arus maju yang mengalir. Dalam kondisi menghantar, tegangan maju pada LED merah adalah 1,6 sampai 2,2 volt, LED kuning 2,4 volt, dan LED hijau 2,7 volt.
LED biasanya digunakan secara luas sebagai lampu indikator, display pada seven segment dan lain sebagainya [23]. Sedangkan LED yang memancarkan cahaya inframerah
pada umumnya digunakan sebagai media transfer data yang tidak memerlukan cahaya tampak seperti remote control dan alarm. Berikut adalah rumus dalam menentukan nilai resistor sebagai pembatas arus pada LED [24]:
(2.1)
2.11. Bascom-AVR
[image:38.595.100.494.190.760.2]Gambar 2.9 merupakan tampilan dari Bascom-AVR. Pada setiap icon yang ada pada interface Bascom-AVR memiliki fungsi masing-masing. Adapun fungsi dari tiap-tiap icon dapat dilihat pada Tabel 2.2.
Gambar 2.9. Interface Bascom-AVR [25]
20
BAB III
RANCANGAN PENELITIAN
3.1.
Proses Kerja Sistem Pengendalian Robot
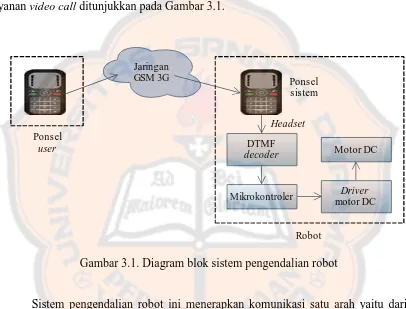
[image:39.595.96.502.213.522.2]Prinsip kerja dari sistem pengendalian robot menggunakan sinyal DTMF pada layanan video call ditunjukkan pada Gambar 3.1.
Gambar 3.1. Diagram blok sistem pengendalian robot
Sistem pengendalian robot ini menerapkan komunikasi satu arah yaitu dari sisi user yang bertindak sebagai pengendali. Sistem ini akan bekerja apabila user melakukan panggilan video ke ponsel sistem pada jaringan GSM 3G. Ponsel sistem akan menjawab panggilan tersebut secara otomatis. Hal ini disebabkan karena ponsel sistem yang dimodifikasi menggunakan headset dan berada pada mode auto answer. Pada saat komunikasi video call pada jaringan GSM 3G antara ponsel user dengan ponsel sistem, sinyal DTMF akan dikirimkan. Data yang dikirim berupa frekuensi dari nada-nada keypad ponsel user kemudian diterima oleh DTMF decoder untuk selanjutnya diterjemahkan ke dalam data biner. Selanjutnya data biner tersebut dikirimkan ke mikrokontroler. Mikrokontroler akan mengolah data biner tersebut dan mengirim sinyal PWM ke driver motor DC untuk menggerakkan motor DC pada robot sesuai dengan data yang diterima.
Penggunaan layanan video call pada sistem pengendalian robot ini bertujuan untuk memberikan informasi visual kepada user. User dapat mengetahui kondisi di sekitar robot secara langsung dari jarak jauh. Jika ada halangan berupa dinding dan lain sebagainya, maka user dapat mengendalikan posisi robot untuk menghindari ataupun menjauhi halangan tersebut dengan cara menekan keypad pada ponsel user. Ponsel yang digunakan oleh user dan robot adalah ponsel nokia series E72. Ponsel tersebut dapat menjawab panggilan video call secara otomatis dan dapat mengirim sinyal DTMF.
3.2.
Kebutuhan Perangkat Keras
Untuk membuat sistem ini, penulis memerlukan beberapa perangkat keras di antaranya sebagai berikut:
1. Ponsel
Dalam pembuatan tugas akhir ini penulis menggunakan ponsel nokia series E72 yang dapat menjawab panggilan video call secara otomatis dan dapat mengirim sinyal DTMF.
2. Notebook
Notebook digunakan untuk menjalankan program Bascom-AVR serta menyalin program ke mikrokontroler.
3. Mikrokontroler ATMega8535
Mikrokontroler digunakan untuk mengolah data dan pengendali utama seluruh sistem.
4. DTMF decoder CM8870
DTMF decoder CM8870 digunakan sebagai penerjemah frekuensi dari nada-nada keypad ponsel user ke dalam data biner.
5. IC L293D
IC L293D digunakan sebagai driver motor DC. 6. Motor DC
Motor DC digunakan sebagai penggerak robot, yaitu bergerak maju, bergerak ke kiri, berhenti, bergerak ke kanan, dan bergerak mundur. Adapun motor DC yang dipakai nantinya menggunakan tegangan 12 volt.
7. Catu daya
3.3.
Kebutuhan Perangkat Lunak
Perangkat lunak yang digunakan oleh penulis dalam sistem pengendalian robot adalah Bascom-AVR yang dapat mengisikan kode program ke dalam memori flash mikrokontroler.
3.4.
Perancangan Alat
3.4.1. Perancangan Konstruksi Robot
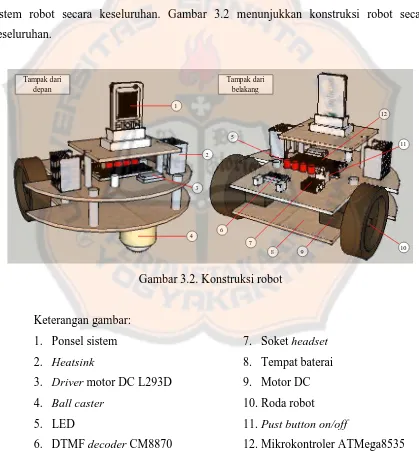
[image:41.595.94.513.254.705.2]Perancangan konstruksi robot berisi komponen-komponen yang membentuk sistem robot secara keseluruhan. Gambar 3.2 menunjukkan konstruksi robot secara keseluruhan.
Gambar 3.2. Konstruksi robot
Keterangan gambar:
1. Ponsel sistem 7. Soket headset
2. Heatsink 8. Tempat baterai
3. Driver motor DC L293D 9. Motor DC
4. Ball caster 10. Roda robot
5. LED 11. Pust button on/off
6. DTMF decoder CM8870 12. Mikrokontroler ATMega8535
3.4.2. Perancangan Rangkaian DTMF Decoder
[image:42.595.98.494.177.434.2]DTMF decoder menggunakan IC CM8870 ditunjukkan pada Gambar 3.3. Penentuan nilai komponen dilakukan berdasarkan datasheet IC CM8870 [17].
Gambar 3.3. Rangkaian DTMF decoder [17]
Rangkaian DTMF decoder akan mengubah frekuensi dari nada-nada yang dikirimkan dari keypad ponsel user menjadi 4 bit data biner. Tabel 3.1 menunjukkan output dari rangkaian DTMF decoder. Output yang dihasilkan dari rangkaian ini akan dihubungkan ke mikrokontroler sehingga mikrokontroler dapat mengenali data yang dikirimkan oleh user. Mikrokontroler akan mengolah data tersebut dan mengirimkan sinyal PWM ke IC L293D untuk menggerakkan motor DC pada robot.
Tabel 3.1. Output dari rangkaian DTMF decoder Keypad
Ponsel
Output CM8870
Q4 Q3 Q2 Q1
1 0 0 0 1
2 0 0 1 0
3 0 0 1 1
4 0 1 0 0
5 0 1 0 1
[image:42.595.121.474.454.761.2]Tabel 3.1. (Lanjutan) Output dari rangkaian DTMF decoder Keypad
Ponsel
Output CM8870
Q4 Q3 Q2 Q1
7 0 1 1 1
8 1 0 0 0
9 1 0 0 1
0 1 0 1 0
* 1 0 1 1
# 1 1 0 0
LED yang digunakan pada rangkaian DTMF decoder berfungsi sebagai display data biner. Sedangkan resistor yang dihubungkan pada LED bertujuan untuk membatasi arus yang melewati pada LED sehingga tidak mengakibatkan kerusakan pada LED. Nilai resistor dapat dihitung dengan menggunakan persamaan 2.1. Pada perancangan ini, nilai tegangan Vs adalah 5 volt yang berasal dari output DTMF decoder. Sedangkan LED yang digunakan adalah LED warna merah yang memiliki jatuh tegangan sebesar 1,7 volt. Nilai I ditentukan sebesar 10 mA [23], sehingga nilai resistor yang didapat adalah:
(2.1)
Berdasarkan hasil perhitungan, maka nilai resistor yang digunakan oleh penulis
adalah 330 Ω.
3.4.3. Perancangan Rangkaian Minimum Sistem ATMega8535
[image:43.595.132.452.98.301.2]pada pin XTAL1 dan pin XTAL2. Rangkaian osilator pada perancangan ini menggunakan kristal 12 MHz dan dua buah kapasitor 22 pF seperti yang ditunjukkan oleh Gambar 3.4.
Gambar 3.4. Rangkaian osilator [14]
Rangkaian minimum sistem juga menyediakan fasilitas reset yang berguna untuk membuat mikrokontroler memulai kembali pembacaan program dari awal. Prinsipnya, jika tombol reset ditekan, maka pin reset akan mendapat input logika rendah atau tegangan catu nol, maka mikrokontroler akan mengulang proses dari awal lagi. Rangkaian reset untuk minimum sistem terlihat seperti pada Gambar 3.5.
Gambar 3.5. Rangkaian reset [14]
[image:44.595.109.517.373.649.2]sebesar 2 uS [14]. Oleh karena itu, jika menggunakan kapasitor 10 nF, maka nilai resistor minimum sistem dapat dihitung dengan persamaan 3.1.
(3.1)
Nilai resistor harus lebih besar dari 200 Ω untuk memperoleh waktu pengosongan kapasitor lebih dari 2 uS. Oleh karena itu, resistor yang digunakan sebesar 4700 Ω untuk memperoleh waktu pengosongan kapasitor sebesar 47 uS.
[image:45.595.83.524.238.741.2]Pengolahan data dari DTMF decoder menggunakan port C pada mikrokontroler. Port D digunakan sebagai input ke rangkaian driver motor DC karena terdapat fungsi PWM di dalamnya. Secara keseluruhan, minimum sistem mikrokontroler ATmega8535 ditunjukkan oleh Gambar 3.6 dan penggunaan port mikrokontroler ATMega8535 ditunjukkan pada Tabel 3.2.
Tabel 3.2. Penggunaan port mikrokontroler ATMega8535
No Nama Port Keterangan
1 Port C DTMF decoder CM8870
2 Port D Driver motor DC L293D
3.4.4. Perancangan Rangkaian Penggerak Motor DC
[image:46.595.88.524.237.593.2]Perancangan robot menggunakan motor DC yang berfungsi sebagai penggerak robot. Mikrokontroler tidak dapat mengendalikan motor DC secara langsung. Tegangan keluaran mikrokontroler hanya sebesar 5 volt, sedangkan motor DC yang digunakan pada robot ini membutuhkan tegangan sebesar 12 volt agar dapat bekerja secara optimal. Oleh karena itu, perlu dibuat rangkaian khusus. Rangkaian pengendali motor DC yang digunakan adalah rangkaian H-Bridge dari sebuah komponen IC L293D. Gambar 3.7 menunjukkan koneksi pin IC L293D dengan mikrokontroler.
Gambar 3.7. Koneksi pin IC L293D dengan mikrokontroler
menggunakan port D.0, port D.1, port D.2, dan port D.3 pada mikrokontroler ATMega8535. Tabel 3.3 menunjukkan kondisi putaran motor DC terhadap arah pergerakan robot.
Tabel 3.3. Kondisi putaran motor DC terhadap pergerakan robot Motor Kiri Motor Kanan Arah Pergerakan Robot Bergerak maju Bergerak ke kiri
Berhenti Bergerak ke kanan
Bergerak mundur
3.5.
Perancangan Program
3.5.1. Diagram Alir Pergerakan Robot Menggunakan Ponsel
Gambar 3.8 adalah diagram alir pergerakan robot menggunakan ponsel dengan teknik pengiriman sinyal DTMF. Proses awal yang dilakukan yaitu inisialisasi port C. Pada saat data yang berupa sinyal DTMF dikirimkan dari keypad ponsel user ke ponsel sistem, DTMF decoder akan menerjemahkan data tersebut dalam bentuk data biner. Data dari DTMF decoder tersebut selanjutnya akan dikirim ke mikrokontroler untuk menggerakkan motor DC pada robot. Proses menggerakkan motor DC pada robot menggunakan sinyal PWM yang dikirimkan dari port D mikrokontoler ke driver motor DC L293D.
Dalam menggerakan robot, pengaturan dibuat dalam 5 kondisi yaitu :
1. Output DTMF decoder bernilai 0010 dengan menekan tombol 2 pada keypad ponsel user, maka robot akan bergerak maju.
2. Output DTMF decoder bernilai 0100 dengan menekan tombol 4 pada keypad ponsel user, maka robot akan bergerak ke kiri.
4. Output DTMF decoder bernilai 0110 dengan menekan tombol 6 pada keypad ponsel user, maka robot akan bergerak ke kanan.
[image:48.595.99.501.189.566.2]5. Output DTMF decoder bernilai 1000 dengan menekan tombol 8 pada keypad ponsel user, maka robot akan bergerak mundur.
Gambar 3.8. Flowchart pergerakan robot menggunakan ponsel
Mulai
0010 ?
0100 ?
0101 ?
set M1a : set M2a : Reset M1b : Reset M2b pwm1a = 1023 : pwm1b = 1023
0110 ? 1000 ? Ya Tidak Ya Ya Ya Ya Tidak Tidak Tidak Tidak Selesai
Inisialisasi port C
set M1b : set M2a : Reset M1a : Reset M2b pwm1a = 550 : pwm1b = 550
Reset M1a : Reset M2a Reset M1b : Reset M2b
set M1a : set M2b : Reset M1b : Reset M2a pwm1a = 550 : pwm1b = 550
30
BAB IV
HASIL DAN PEMBAHASAN
4.1.
Hasil Implementasi Alat
Pada implementasi sistem pengedalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call tidak berjalan sesuai dengan perancangan pada bab 3 khususnya pada bagian pengiriman sinyal DTMF saat komunikasi video call pada jaringan GSM 3G. Saat user melakukan panggilan video ke ponsel sistem menggunakan ponsel nokia series E72, ponsel sistem dapat menjawab panggilan video secara otomatis. Saat yang bersamaan ponsel sistem secara otomatis juga akan mengirimkan gambar video ke ponsel user. Namun saat terjadinya komunikasi video call pada jaringan GSM 3G antara ponsel user dengan ponsel sistem, sinyal DTMF tidak dapat dikirimkan oleh user dengan menggunakan ponsel nokia series E72. Gambar 4.1 menunjukkan hasil implementasi sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call.
(a)
3 4 2
1
10 6
7
9 5
8 Tampak
depan
(b)
Gambar 4.1. Hasil implementasi sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call (a) Robot (b) Ponsel user
Keterangan gambar robot:
1. Ponsel sistem (Nokia series E72) 6. Mikrokontroler ATMega8535
2. Tombol reset 7. DTMF decoder CM8870
3. Ball caster 8. Roda robot
4. Driver motor DC L293D 9. Headset
5. Downloader 10. Tombol on
4.2.
Hasil Pengujian DTMF Decoder dan Sinyal DTMF
Tabel 4.1. Hasil pengujian keluaran DTMF decoder saat video call Keypad
Skype
Keluaran DTMF Decoder Saat Video Call Display Data Biner
Q4 Q3 Q2 Q1
1 0 0 0 0 Gambar 4.2a
2 0 0 0 0 Gambar 4.2b
3 0 0 0 0 Gambar 4.2c
4 0 0 0 0 Gambar 4.2d
5 0 0 0 0 Gambar 4.2e
6 0 0 0 0 Gambar 4.2f
7 0 0 0 0 Gambar 4.2g
8 0 0 0 0 Gambar 4.2h
9 0 0 0 0 Gambar 4.2i
0 0 0 0 0 Gambar 4.2j
* 0 0 0 0 Gambar 4.2k
# 0 0 0 0 Gambar 4.2l
(a) (b) (c)
(d) (e) (f)
Gambar 4.2. Hasil pengujian keluaran DTMF decoder
(a) Tombol 1 ditekan (b) Tombol 2 ditekan (c) Tombol 3 ditekan (d) Tombol 4 ditekan (e) Tombol 5 ditekan (f) Tombol 6 ditekan (g) Tombol 7 ditekan (h) Tombol 8 ditekan (i) Tombol 9 ditekan (j) Tombol 0 ditekan (k) Tombol * ditekan (l) Tombol # ditekan
(j) (k) (l)
(a) (b) (c)
(d) (e) (f)
Gambar 4.3. Hasil pengujian sinyal DTMF saat video call
(a) Tombol 1 ditekan (b) Tombol 2 ditekan (c) Tombol 3 ditekan (d) Tombol 4 ditekan (e) Tombol 5 ditekan (f) Tombol 6 ditekan (g) Tombol 7 ditekan (h) Tombol 8 ditekan (i) Tombol 9 ditekan (j) Tombol 0 ditekan (k) Tombol * ditekan (l) Tombol # ditekan
Berdasarkan data hasil pengujian DTMF decoder dan sinyal DTMF saat komunikasi video call pada jaringan GSM 3G antara ponsel user dengan ponsel sistem, ternyata sinyal DTMF tidak dapat dikirimkan oleh user dengan menggunakan ponsel nokia series E72. Hal ini tidak disebabkan dari spesifikasi ponsel nokia series E72 melainkan dari provider di Indonesia yang tidak menyertakan sinyal DTMF pada layanan video call pada jaringan GSM 3G. Tabel 4.2 menunjukkan hasil pengujian sinyal DTMF pada berbagai jenis SIM card GSM.
Tabel 4.2. Hasil pengujian sinyal DTMF pada berbagai jenis SIM card GSM SIM Card
GSM
Sinyal DTMF Video Call Voice Call
AS Tidak ada Ada
SIMPATI Tidak ada Ada
IM3 Tidak ada Ada
MENTARI Tidak ada Ada
AXIS Tidak ada Ada
THREE Tidak ada Ada
XL Tidak ada Ada
Berdasarkan data hasil pengujian sinyal DTMF pada berbagai jenis SIM card GSM serta kegagalan saat implementasi sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call, maka penulis mencari alternatif lain
yaitu dengan menggunakan aplikasi skype. Penggunaan aplikasi skype pada tugas akhir ini bertujuan untuk mengirimkan sinyal DTMF ke ponsel sistem. Aplikasi skype dapat mengirimkan dan menerima sinyal DTMF pada saat komunikasi video call.
4.3.
Skype
Skype adalah aplikasi komunikasi suara berbasis Internet Protokol (IP) melalui internet antara sesama pengguna skype [26]. Pada saat menggunakan aplikasi skype, maka pengguna skype yang sedang online akan mencari pengguna skype lainnya. Pengguna aplikasi skype bisa melakukan panggilan antar komputer ke komputer, komputer ke telepon rumah, komputer ke ponsel maupun ponsel ke ponsel dengan biaya/tarif yang sangat murah dengan kualitas suara yang sangat bagus.
Komunikasi dengan aplikasi skype dapat dilakukan secara real time. Mekanisme real time sendiri adalah saat pengguna mengirim teks, komunikasi suara atau video,
penerima dapat menerimanya pada saat yang bersamaan sehingga dua pihak atau lebih (teleconference) di tempat yang berbeda dapat berkomunikasi dengan baik.
[image:54.595.93.517.364.720.2]Pada saat implementasi sistem pengendalian robot jarak jauh dengan aplikasi skype, penulis kesulitan mendapatkan ponsel qwerty yang mendukung aplikasi skype khususnya pada layanan video call. Oleh sebab itu, dari sisi user penulis mengganti ponsel dengan sebuah notebook untuk mengendalikan robot dari jarak jauh. Gambar 4.4 menunjukkan blok diagram sistem pengendalian robot jarak jauh dengan aplikasi skype.
Gambar 4.4. Blok diagram sistem pengendalian robot jarak jauh dengan aplikasi skype
Sistem pengendalian robot jarak jauh akan bekerja apabila user melakukan panggilan video ke ponsel sistem dengan menggunakan aplikasi skype pada notebook. Ponsel sistem akan menjawab panggilan tersebut secara otomatis. Hal ini disebabkan karena ponsel sistem yang menggunakan aplikasi skype berada pada mode answer calls automatically. Pada saat terjadi komunikasi antara notebook user dengan ponsel sistem, sinyal DTMF akan dikirimkan. Data yang dikirim berupa frekuensi dari nada-nada keypad aplikasi skype pada notebook kemudian akan diterima oleh DTMF decoder untuk selanjutnya diterjemahkan ke dalam data biner. Selanjutnya data biner tersebut dikirimkan ke mikrokontroler. Mikrokontroler akan mengolah data biner tersebut dan mengirim sinyal PWM ke driver motor DC untuk menggerakkan motor DC pada robot. Gambar 4.5 menunjukkan hasil implementasi dari sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call dengan aplikasi skype.
(a)
[image:55.595.93.507.280.726.2](b)
Gambar 4.5. Hasil implementasi sistem pengendalian robot jarak jauh menggunakan sinyal DTMF pada layanan video call dengan aplikasi skype (a) Robot (b) Notebook user
Keterangan gambar robot:
1. Ponsel sistem (Samsung S3) 6. Mikrokontroler ATMega8535
2. Tombol reset 7. DTMF decoder CM8870
3. Ball caster 8. Roda robot
4. Driver motor DC L293D 9. Headset
5. Downloader 10. Tombol on
4.4.
Hasil Pengujian Dengan Aplikasi Skype
4.4.1. Pengujian Keluaran DTMF Decoder Saat Video Call
Pengujian DTMF decoder dilakukan dengan cara menekan tombol 1, 2, 3, 4, 5, 6, 7, 8, 9, 0, *, dan # pada notebook user dengan menggunakan aplikasi skype. Pada bagian output DTMF decoder terdapat 4 buah LED merah yang berfungsi sebagai display data biner. Setiap output dari DTMF decoder ditandai dengan nyala LED. Tabel 4.3 menunjukkan hasil pengujian keluaran DTMF decoder saat video call dengan aplikasi skype. Gambar 4.6 menunjukkan hasil pengujian keluaran DTMF decoder. Gambar 4.7 menunjukkan hasil pengujian sinyal DTMF saat video call dengan aplikasi skype.
Tabel 4.3. Hasil pengujian keluaran DTMF decoder saat video call dengan aplikasi skype Keypad
Skype
Keluaran DTMF Decoder Saat Video Call Display Data Biner
Q4 Q3 Q2 Q1
1 0 0 0 1 Gambar 4.6a
2 0 0 1 0 Gambar 4.6b
3 0 0 1 1 Gambar 4.6c
4 0 1 0 0 Gambar 4.6d
5 0 1 0 1 Gambar 4.6e
6 0 1 1 0 Gambar 4.6f
7 0 1 1 1 Gambar 4.6g
8 1 0 0 0 Gambar 4.6h
9 1 0 0 1 Gambar 4.6i
0 1 0 1 0 Gambar 4.6j
* 1 0 1 1 Gambar 4.6k
Gambar 4.6. Hasil pengujian keluaran DTMF decoder
(a) Tombol 1 ditekan (b) Tombol 2 ditekan (c) Tombol 3 ditekan (d) Tombol 4 ditekan (e) Tombol 5 ditekan (f) Tombol 6 ditekan (g) Tombol 7 ditekan (h) Tombol 8 ditekan (i) Tombol 9 ditekan (j) Tombol 0 ditekan (k) Tombol * ditekan (l) Tombol # ditekan
Berdasarkan data hasil pengujian keluaran DTMF decoder terbukti bahwa perancangan DTMF decoder telah berhasil dilakukan. Hal ini disebabkan karena DTMF decoder berhasil mengkodekan input sinyal DTMF dari notebook user dengan benar dan output DTMF decoder telah sesuai dengan dasar teori.
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
Gambar 4.7. Hasil pengujian sinyal DTMF saat video call dengan aplikasi skype (a) Tombol 1 ditekan (b) Tombol 2 ditekan (c) Tombol 3 ditekan (d) Tombol 4 ditekan (e) Tombol 5 ditekan (f) Tombol 6 ditekan (g) Tombol 7 ditekan (h) Tombol 8 ditekan (i) Tombol 9 ditekan (j) Tombol 0 ditekan (k) Tombol * ditekan (l) Tombol # ditekan
Berdasarkan data hasil pengujian sinyal DTMF terlihat adanya perbedaan antara teori (Tabel 2.1) dengan hasil pengujian. Hal ini disebabkan karena sinyal DTMF yang dikirimkan dari notebook user saat komunikasi video call dengan aplikasi skype hanya sesaat tertampil pada layar osiloskop, sehingga pada saat menggunakan osiloskop penulis
(a) (b) (c)
(d) (e) (f)
(g) (h) (i)
mengalami kesulitan pada saat capture gambar sinyal DTMF tersebut. Untuk lebih jelasnya dari Gambar 4.7 dapat dilihat pada lampiran.
4.4.2. Pengujian Pergerakan Robot Saat Video Call
[image:59.595.89.515.189.615.2]Pengujian pergerakan robot saat video call dilakukan dengan cara melakukan panggilan video serta mengirimkan sinyal DTMF ke ponsel sistem dengan menggunakan aplikasi skype pada notebook user. Tabel 4.4 menunjukkan perbandingan hasil perancangan dan pengujian pergerakan robot saat video call dengan aplikasi skype.
Tabel 4.4. Perbandingan hasil perancangan dan pengujian pergerakan robot saat video call dengan aplikasi skype
Keypad Skype Hasil Perancangan Pergerakan Robot Hasil Pengujian Pergerakan Robot
1 No respone No respone
2 Robot bergerak maju Robot bergerak maju
3 No respone No respone
4 Robot bergerak ke kiri Robot bergerak ke kiri 5 Robot berhenti Robot berhenti
6 Robot bergerak ke kanan Robot bergerak ke kanan
7 No respone No respone
8 Robot bergerak mundur Robot bergerak mundur
9 No respone No respone
0 No respone No respone
* No respone No respone
# No respone No respone
Dari hasil pengujian terlihat adanya 5 kondisi arah pergerakan robot, yaitu: 1. Saat tombol 2 ditekan, robot akan bergerak maju.
2. Saat tombol 4 ditekan, robot akan bergerak ke kiri.
3. Saat tombol 5 ditekan, robot akan berhenti.
4. Saat tombol 6 ditekan, robot akan bergerak ke kanan.
Pada tugas akhir ini, penulis juga melakukan pengujian tingkat keberhasilan pergerakan robot saat video call. Tingkat keberhasilan pergerakan robot dapat diketahui dengan melakukan beberapa kali pengujian dalam mengendalikan robot saat video call dengan menggunakan aplikasi skype. Tabel 4.5 menunjukkan tingkat keberhasilan pergerakan robot saat video call dengan aplikasi skype.
Tabel 4.5. Tingkat keberhasilan pergerakan robot saat video call dengan aplikasi skype
Tingkat keberhasilan dari pergerakan robot saat video call dengan aplikasi skype dapat dihitung dengan persamaan sebagai berikut:
Percobaan Keypad
Skype
Pergerakan Robot Saat
Video Call
1 2 Robot bergerak maju
2 2 Robot bergerak maju
3 2 Robot bergerak maju
4 2 Robot bergerak maju
5 2 Robot bergerak maju
6 2 Robot bergerak maju
7 2 Robot bergerak maju
8 2 Robot bergerak maju
9 2 Robot bergerak maju
10 2 Robot bergerak maju
11 4 Robot bergerak ke kiri
12 4 Robot bergerak ke kiri
13 4 Robot bergerak ke kiri
14 4 Robot bergerak ke kiri
15 4 Robot bergerak ke kiri
16 4 Robot bergerak ke kiri
17 4 Robot bergerak ke kiri
18 4 Robot bergerak ke kiri
19 4 Robot bergerak ke kiri
20 4 Robot bergerak ke kiri
21 5 Robot berhenti
22 5 Robot berhenti
23 5 Robot berhenti
24 5 Robot berhenti
25 5 Robot berhenti
Percobaan Keypad
Skype
Pergerakan Robot Saat
Video Call
26 5 Robot berhenti
27 5 Robot berhenti
28 5 Robot berhenti
29 5 Robot berhenti
30 5 Robot berhenti
31 6 Robot bergerak ke kanan
32 6 Robot bergerak ke kanan
33 6 Robot bergerak ke kanan
34 6 Robot bergerak ke kanan
35 6 Robot bergerak ke kanan
36 6 Robot bergerak ke kanan
37 6 Robot bergerak ke kanan
38 6 Robot bergerak ke kanan
39 6 Robot bergerak ke kan
![Gambar 2.2. Konfigurasi pin mikrokontroler ATMega8535 [14]](https://thumb-ap.123doks.com/thumbv2/123dok/915543.615171/30.595.98.526.82.646/gambar-konfigurasi-pin-mikrokontroler-atmega.webp)
![Gambar 2.3. Rangkaian DTMF decoder CM8870 [17]](https://thumb-ap.123doks.com/thumbv2/123dok/915543.615171/33.595.111.508.426.732/gambar-rangkaian-dtmf-decoder-cm.webp)
![Gambar 2.4. Gelombang sinyal PWM [4]](https://thumb-ap.123doks.com/thumbv2/123dok/915543.615171/34.595.83.518.238.532/gambar-gelombang-sinyal-pwm.webp)
![Gambar 2.5. Konstruksi motor DC [20]](https://thumb-ap.123doks.com/thumbv2/123dok/915543.615171/35.595.92.514.93.530/gambar-konstruksi-motor-dc.webp)
![Gambar 2.6. Motor DC [20]](https://thumb-ap.123doks.com/thumbv2/123dok/915543.615171/36.595.91.514.83.304/gambar-motor-dc.webp)
![Gambar 2.8. Rangkaian LED [22]](https://thumb-ap.123doks.com/thumbv2/123dok/915543.615171/37.595.81.522.226.484/gambar-rangkaian-led.webp)
![Gambar 2.9. Interface Bascom-AVR [25]](https://thumb-ap.123doks.com/thumbv2/123dok/915543.615171/38.595.100.494.190.760/gambar-interface-bascom-avr.webp)