Abstrak— Kendaraan elektris yang banyak dikembangkan saat ini digerakkan oleh listrik yang tersimpan dalam baterai. Kendala utama yang muncul akibat penggunaan baterai ini adalah terbatasnya jarak tempuh dari kendaraan. Metode yang dikembangkan saat ini menyiasati kendala tersebut dengan memanfaatkan regenerasi energi saat dilakukan pengereman elektris. Tugas akhir ini mengusulkan suatu metode pengereman elektris dengan regenerasi energi untuk motor
brushless DC (BLDC) yang lebih sederhana namun efektif.
Hanya dengan mengganti urutan switching dari voltage source
inverter maka torsi balik dari motor pun dapat dikontrol
sehingga energi kinetik pengereman dapat diubah menjadi listrik dan dikembalikan lagi ke dalam baterai. Arus regeneratif akan mengalir dari motor ke baterai melalui dioda freewheeling. Hasil simulasi menunjukkan bahwa sistem ini mampu memberikan variasi torsi pengereman elektris yang mumpuni sekaligus menambah state of charge (SOC) baterai. Nilai penambahan SOC terbesar mencapai 0,00304 Ah dalam sekali pengereman dengan sinyal referensi pengereman 0,3 volt. Penambahan SOC semakin besar saat sistem pengereman elektris ini juga digunakan sebagai pembatas kecepatan pada simulasi kondisi jalan menurun.
Kata Kunci — Motor Brushless DC, State of Charge, Switching, Voltage Source Inverter.
I. PENDAHULUAN
AMPIR semua kendaraan listrik yang dikembangkan saat ini sepenuhnya menggunakan energi listrik yang tersimpan dalam baterai atau lebih populer disebut Plug in Electric Vehicle (PEV). Namun baterai juga menjadi sisi terlemah dari PEV yang mengakibatkan terbatasnya jarak tempuh PEV akibat efisiensi baterai yang masih rendah. Perkembangan teknologi sistem transportasi listrik saat ini terkonsentrasi pada upaya untuk meningkatkan efisiensi penggunaan baterai. Pada teknologi konvensional, PEV masih menggunakan pengereman mekanik untuk menurunkan kecepatan. Namun dari sisi efisiensi energi, pengereman mekanik banyak membuang enegi kinetik PEV menjadi panas. Alangkah baiknya bila energi kinetik tersebut dapat dikembalikan lagi ke baterai sehingga meminimalkan jumlah energi yang terbuang dan dapat meningkatkan jarak tempuh dari PEV. Hal ini dapat dilakukan dengan memanfaatkan regenerasi energi saat dilakukan pengereman elektris pada motor yang digunakan PEV.
Sejauh ini, telah muncul beberapa macam metode-metode yang menerapkan regenerasi energi ini pada driving system EVs seperti penambahan konverter DC/DC [1], penggunaan Ultracapacitor sebagai media penyimpan sementara braking energy [2] ataupun penerapan teknik winding-changeover [3]. Metode-metode tersebut membuat biaya produksi meningkat akibat penambahan komponen, mempengaruhi efisiensi akibat disipasi daya yang besar, dan juga membutuhkan design motor khusus dan kontrol motor yang rumit.
Pada penelitian ini dilakukan perancangan bidirectional voltage source inverter (VSI) yang terhubung dengan motor DC brushless sebagai penggerak mobil listrik dengan baterai lithium sebagai sumber utama. Sebagai acuan dari penelitian ini adalah mobil dengan konsep city car yakni Honda CR-Z.
Dengan cukup mengganti urutan switching VSI pada driving system EVs berdasarkan sinyal yang diberikan sensor Hall dari motor DC brushless (BLDC) maka permasalahan-permasalahan yang muncul dari metode-metode sebelumnya dapat terselesaikan. Urutan switching saat kondisi akselerasi dan saat kondisi regenerasi energi dibedakan sehingga akan membentuk aliran daya keluar dan masuk ke baterai [4]. Discharge baterai saat kondisi akselerasi dan charge baterai saat kondisi pengereman. Hal ini akan membuat daya tahan baterai meningkat sehingga jarak tempuh PEV pun juga dapat bertambah tanpa mengabaikan kenyamanan dan keselamatan pengendara.
II. SISTEMBIDIRECTIONALINVERTER A. Prinsip Pengoperasian Bidirectional Inverter
Inverter dirancang untuk dapat bekerja secara dua arah atau bidirectional seperti diilustrasikan pada Gambar 1. Inverter akan memberikan daya dari baterai ke motor saat mode
untuk Aplikasi Kendaraan Listrik
Ahmad Afif Fahmi, Mochamad Ashari dan Heri Suryoatmojo.
Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected]; [email protected]
H
Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Juni 2013 2
akselerasi namun ketika mode regeneratif maka inverter harus dapat menyalurkan daya regeneratif dari motor kembali ke baterai.
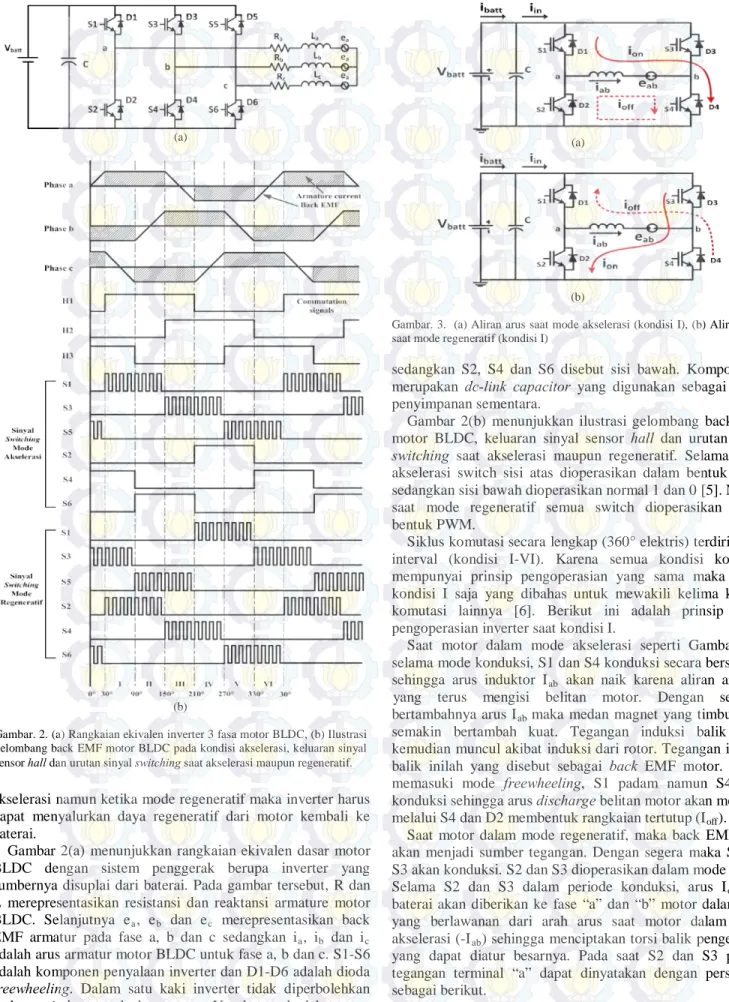
Gambar 2(a) menunjukkan rangkaian ekivalen dasar motor BLDC dengan sistem penggerak berupa inverter yang sumbernya disuplai dari baterai. Pada gambar tersebut, R dan L merepresentasikan resistansi dan reaktansi armature motor BLDC. Selanjutnya ea, eb dan ec merepresentasikan back EMF armatur pada fase a, b dan c sedangkan ia, ib dan ic adalah arus armatur motor BLDC untuk fase a, b dan c. S1-S6 adalah komponen penyalaan inverter dan D1-D6 adalah dioda freewheeling. Dalam satu kaki inverter tidak diperbolehkan kedua switch menyala bersamaan. Untuk membedakan agar memudahkan analisis maka S1, S3 dan S5 dinamakan sisi atas
sedangkan S2, S4 dan S6 disebut sisi bawah. Komponen C merupakan dc-link capacitor yang digunakan sebagai media penyimpanan sementara.
Gambar 2(b) menunjukkan ilustrasi gelombang back EMF motor BLDC, keluaran sinyal sensor hall dan urutan sinyal switching saat akselerasi maupun regeneratif. Selama mode akselerasi switch sisi atas dioperasikan dalam bentuk PWM sedangkan sisi bawah dioperasikan normal 1 dan 0 [5]. Namun saat mode regeneratif semua switch dioperasikan dalam bentuk PWM.
Siklus komutasi secara lengkap (360° elektris) terdiri dari 6 interval (kondisi I-VI). Karena semua kondisi komutasi mempunyai prinsip pengoperasian yang sama maka hanya kondisi I saja yang dibahas untuk mewakili kelima kondisi komutasi lainnya [6]. Berikut ini adalah prinsip aliran pengoperasian inverter saat kondisi I.
Saat motor dalam mode akselerasi seperti Gambar 3(a) selama mode konduksi, S1 dan S4 konduksi secara bersamaan sehingga arus induktor Iab akan naik karena aliran arus Ion yang terus mengisi belitan motor. Dengan semakin bertambahnya arus Iab maka medan magnet yang timbul akan semakin bertambah kuat. Tegangan induksi balik “eab“ kemudian muncul akibat induksi dari rotor. Tegangan induksi balik inilah yang disebut sebagai back EMF motor. Ketika memasuki mode freewheeling, S1 padam namun S4 tetap konduksi sehingga arus discharge belitan motor akan mengalir melalui S4 dan D2 membentuk rangkaian tertutup (Ioff).
Saat motor dalam mode regeneratif, maka back EMF (eab) akan menjadi sumber tegangan. Dengan segera maka S2 dan S3 akan konduksi. S2 dan S3 dioperasikan dalam mode PWM. Selama S2 dan S3 dalam periode konduksi, arus Ion dari baterai akan diberikan ke fase “a” dan “b” motor dalam arah yang berlawanan dari arah arus saat motor dalam mode akselerasi (-Iab) sehingga menciptakan torsi balik pengereman yang dapat diatur besarnya. Pada saat S2 dan S3 padam, tegangan terminal “a” dapat dinyatakan dengan persamaan sebagai berikut.
𝑉𝑎= 𝑒𝑎+ 𝑣𝑛 (1)
(a)
(b)
Gambar. 2. (a) Rangkaian ekivalen inverter 3 fasa motor BLDC, (b) Ilustrasi gelombang back EMF motor BLDC pada kondisi akselerasi, keluaran sinyal sensor hall dan urutan sinyal switching saat akselerasi maupun regeneratif.
(a)
(b)
Berdasarkan persamaan 2 dan 3, tegangan netral dapat ditulis sebagai berikut.
𝑣𝑛=12[𝑉𝑑𝑐− (𝑒𝑎+ 𝑒𝑏)] (4)
Seperti digambarkan pada Gambar 2(b), amplitudo back EMF selama fase konduksi saat fase I dan II adalah sama namun dengan polaritas yang saling berlawanan, yaitu 𝑒𝑎+ 𝑒𝑏= 0. Dengan demikian, tegangan netral dapat ditulis dengan persamaan di bawah ini.
𝑣𝑛=12𝑉𝑑𝑐 (5)
Sehingga,
𝑉𝑎=12𝑉𝑑𝑐+ 𝑒𝑎, 𝜃𝑒= 30° ~ 150° (6)
Mengingat pada kondisi I back EMF “ea” bernilai maksimum maka nilai Va menjadi sedikit lebih besar dari Vdc sehingga memungkinkan arus Ioff mengalir ke baterai melalui dioda freewheeling D1 dan D4 dengan arah aliran seperti diperlihatkan pada Gambar 3(b).
B. Konfigurasi Sistem Bidirectional Inverter
Konfigurasi sistem yang ditunjukkan pada Gambar 4 merupakan gambaran sederhana sistem penggerak motor pada penelitian ini. Sistem ini terdiri dari baterai lithium-ion, inverter 3 fasa, decoder sebagai penyalaan inverter, pengatur kecepatan motor dan motor BLDC 12 kW. Baterai lithium-ion (LiFePO4) 144 V 150 Ah merupakan sumber kelistrikan utama yang terdapat pada sistem. Baterai akan langsung
terhubung dengan bidirectional inverter. Fungsi dua arah inverter tersebut diatur oleh sinyal penyalaan yang diberikan decoder kepada keenam power switch (IGBT) inverter. Decoder akan mendapatkan masukan dari sensor hall motor, brake command (SB) dan sinyal controlled PWM. Saat SB bernilai 0 maka decoder bekerja dalam mode akselerasi sehingga motor akan berputar. Namun ketika SB bernilai 1 atau saat pengereman elektris terjadi maka decoder secara otomatis mengganti modenya menjadi mode regeneratif sehingga pengereman plugging dan regeneratif pun terjadi secara periodik. Sub sistem controlled PWM termasuk dalam pengaturan kecepatan motor. Pengaturan kecepatan motor menggunakan kontroler PI dengan menggunakan referensi kecepatan dan arus output baterai aktual. Terdapat dua kali upaya penghilangan error dengan contoller PI. Pertama terjadi dalam blok driver controller dimana error yang diperoleh berasal pembandingan antara kecepatan aktual dan kecepatan referensi. Selanjutnya upaya kedua terjadi dalam blok current controller dengan pembanding arus input DC yang merupakan arus aktual keluaran baterai. Keluaran dari current controller lantas masuk ke mode selection (Mux) yang dikontrol oleh sinyal SB. Saat akselerasi (SB = 0), sinyal keluaran current controller lebih diutamakan untuk menjadi sinyal referensi PWM. Sinyal SB otomatis akan bernilai 1 saat sinyal brake reference ( sinyal referensi pengeraman) bernilai lebih besar dari nol. Brake reference ini akan menentukan besar torsi pengereman yang diinginkan. Begitu diberikan referensi pengereman maka SB akan bernilai 1. Dengan begitu sinyal ini akan lebih diutamakan oleh mux untuk mengatur besar torsi pengereman dan membatasi arus regenerasi. Gambaran mengenai sistem controlled PWM yang digunakan pada tugas akhir ini lebih jelas terdapat pada Gambar 5.
C. Perancangan Decoder
Keluaran decoder akan dipengaruhi oleh sinyal Hall dari motor dan sinyal perintah pengereman yang diterimanya. Dan untuk memberikan akses pengaturan kecepatan motor dan torsi pengereman maka dalam decoder juga diinjeksikan sinyal PWM dengan frekuensi 15 KHz. Decoder berupa rangkaian logika yang disusun berdasarkan kombinasi-kombinasi pada Tabel 1 dan 2.
Gambar. 4. Konfigurasi sistem bidirectional inverter
Gambar. 5. Sistem controlled PWM
IV 010 S2 S3 -
V 011 S2 - S5
VI 001 - S4 S5
Tabel 2
Kombinasi Timing Komutasi Mode Regeneratif Step Kombinasi
H(a,b,c) S1 & S2 S3 & S4 S5 & S6
Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Juni 2013 4
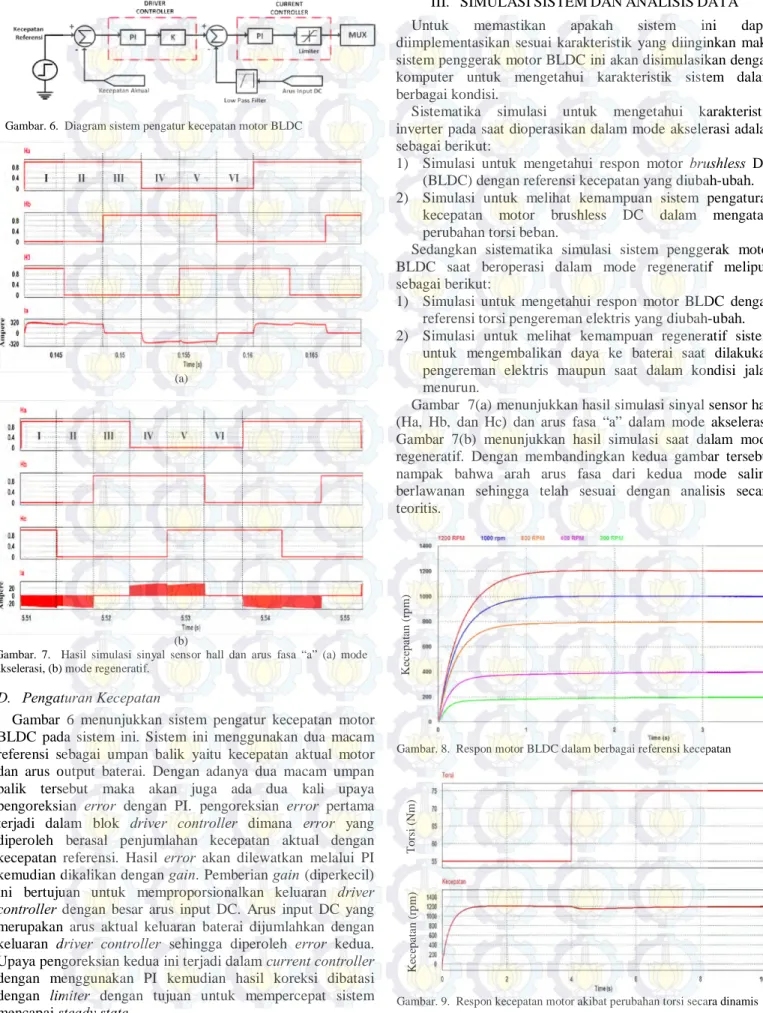
D. Pengaturan Kecepatan
Gambar 6 menunjukkan sistem pengatur kecepatan motor BLDC pada sistem ini. Sistem ini menggunakan dua macam referensi sebagai umpan balik yaitu kecepatan aktual motor dan arus output baterai. Dengan adanya dua macam umpan balik tersebut maka akan juga ada dua kali upaya pengoreksian error dengan PI. pengoreksian error pertama terjadi dalam blok driver controller dimana error yang diperoleh berasal penjumlahan kecepatan aktual dengan kecepatan referensi. Hasil error akan dilewatkan melalui PI kemudian dikalikan dengan gain. Pemberian gain (diperkecil) ini bertujuan untuk memproporsionalkan keluaran driver controller dengan besar arus input DC. Arus input DC yang merupakan arus aktual keluaran baterai dijumlahkan dengan keluaran driver controller sehingga diperoleh error kedua. Upaya pengoreksian kedua ini terjadi dalam current controller dengan menggunakan PI kemudian hasil koreksi dibatasi dengan limiter dengan tujuan untuk mempercepat sistem mencapai steady state.
III. SIMULASISISTEMDANANALISISDATA
Untuk memastikan apakah sistem ini dapat diimplementasikan sesuai karakteristik yang diinginkan maka sistem penggerak motor BLDC ini akan disimulasikan dengan komputer untuk mengetahui karakteristik sistem dalam berbagai kondisi.
Sistematika simulasi untuk mengetahui karakteristik inverter pada saat dioperasikan dalam mode akselerasi adalah sebagai berikut:
1) Simulasi untuk mengetahui respon motor brushless DC (BLDC) dengan referensi kecepatan yang diubah-ubah. 2) Simulasi untuk melihat kemampuan sistem pengaturan
kecepatan motor brushless DC dalam mengatasi perubahan torsi beban.
Sedangkan sistematika simulasi sistem penggerak motor BLDC saat beroperasi dalam mode regeneratif meliputi sebagai berikut:
1) Simulasi untuk mengetahui respon motor BLDC dengan referensi torsi pengereman elektris yang diubah-ubah. 2) Simulasi untuk melihat kemampuan regeneratif sistem
untuk mengembalikan daya ke baterai saat dilakukan pengereman elektris maupun saat dalam kondisi jalan menurun.
Gambar 7(a) menunjukkan hasil simulasi sinyal sensor hall (Ha, Hb, dan Hc) dan arus fasa “a” dalam mode akselerasi. Gambar 7(b) menunjukkan hasil simulasi saat dalam mode regeneratif. Dengan membandingkan kedua gambar tersebut nampak bahwa arah arus fasa dari kedua mode saling berlawanan sehingga telah sesuai dengan analisis secara teoritis.
(a)
(b)
Gambar. 7. Hasil simulasi sinyal sensor hall dan arus fasa “a” (a) mode akselerasi, (b) mode regeneratif.
Gambar. 8. Respon motor BLDC dalam berbagai referensi kecepatan
Gambar. 9. Respon kecepatan motor akibat perubahan torsi secara dinamis
T o rs i (N m )
Gambar. 6. Diagram sistem pengatur kecepatan motor BLDC
Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Juni 2013 5
A. Simulasi Sistem dengan Kecepatan Bervariasi
Simulasi ini bertujuan untuk mengetahui karakteristik sistem bidirectional inverter dalam menyalurkan daya ke motor sehingga motor BLDC dapat memberikan respon kecepatan yang sesuai dengan kecepatan referensi yang diinginkan. Pada simulasi ini motor BLDC diberikan kecepatan referensi yang bervariasi yaitu 1200 rpm, 1000 rpm, 800 rpm, 400 rpm dan 200 rpm. Beban motor yang diberikan sebesar 55 Nm dan inverter dalam mode akselerasi (sinyal SB=0). Gambar 8 memperlihatkan respon kecepatan motor BLDC dengan berbagai macam kecepatan referensi.
Kecepatan yang dicapai motor ketika telah mencapai steady state hampir mendekati kecepatan referensi yang diberikan ke motor dengan kesalahan di bawah 1 %. Namun semakin rendah kecepatan maka semakin lama pula waktu steady state kecepatan.
B. Karakteristik Kecepatan Motor BLDC terhadap Perubahan Torsi
Simulasi ini bertujuan untuk mengetahui kemampuan sistem penggerak motor BLDC dalam mempertahankan kecepatan yang diinginkan referensi meskipun beban yang ditanggung motor semakin besar. Gambar 9 menunjukkan respon kecepatan motor pada perubahan torsi secara dinamis. Pada awalnya, motor dipacu pada kecepatan 1200 rpm dengan beban 55 Nm. Kecepatan motor mencapai steady state dalam waktu 2,8 detik. Saat detik ke-4, torsi beban ditambah menjadi 75 Nm. Akibat penambahan ini, kecepatan sempat turun pada nilai 1154 rpm. Namun sistem segera memperbaiki respon kecepatan tersebut dan mengembalikan kecepatan motor ke 1200 rpm pada detik ke-7,6.
C. Simulasi Sistem dengan Torsi Pengereman Elektris Bervariasi
Simulasi ini bertujuan untuk mengetahui respon motor BLDC saat dilakukan pengereman elektris dengan variasi torsi pengereman. Besarnya torsi pengeraman ditentukan berdasarkan sinyal referensi pengereman (brake reference) yang diberikan ke PWM. Simulasi ini dilakukan dengan menjalankan motor selama lima detik menggunakan referensi kecepatan 1200 rpm. Kemudian dilakukan pengereman elektris pada detik ke-5. Untuk melakukan pengereman maka referensi kecepatan langsung dibuat nol tapi referensi pengereman (brake reference) diberikan nilai sesuai dengan torsi pengereman yang diinginkan. Semakin besar nilai sinyal referensi pengereman maka semakin besar torsi pengereman yang dihasilkan seperti ditunjukkan pada Gambar 10(a). Hal ini berkaitan dengan besar arus yang dialirkan ke motor untuk menciptakan torsi balik. Naiknya sinyal referensi pengereman berpengaruh pada lebar sinyal PWM. Semakin besar duty cycle PWM maka arus yang dikonduksikan ke stator motor juga semakin besar sehingga tercipta medan putar lawan yang semakin kuat. Namun jika referensi pengereman terlalu besar dapat menyebabkan torsi balik yang terbentuk terlalu besar sehingga motor akan berputar balik seperti diperlihatkan pada Gambar 10(b). Hal inilah yang dihindari dengan membatasi besar referensi pengereman.
D. Simulasi Kemampuan Regeneratif Sistem
Simulasi ini bertujuan untuk mengetahui kemampuan sistem dalam memanfaatkan daya regeneratif saat terjadi pengereman elektris. Pengereman plugging dan regeneratif sama-sama terjadi saat sistem dalam mode regeneratif. Untuk membedakan keduanya dapat diamati dari sinyal PWM. Ketika sinyal PWM bernilai 1 (∆ton) maka switch tertentu akan mengalirkan arus pengereman ke motor (pengereman plugging). Sedangkan saat sinyal PWM bernilai 0 (∆toff) maka
semua switch mati dan arus regeneratif pun akan mengalir ke baterai dan memberikan torsi pengereman pada motor namun tidak sebesar torsi yang dihasilkan saat sinyal PWM bernilai 1. Arus baterai pada saat sistem dioperasikan dalam mode regeneratif berbentuk pulsa berfrekuensi tinggi sesuai dengan frekuensi dari penyalaan switch. Gambar 11 menunjukkan bentuk pulsa arus baterai saat mode regeneratif. Pulsa bernilai positif itu adalah saat dimana pengereman secara plugging
(a)
(b)
Gambar. 10. (a) Respon kecepatan motor dalam berbagai variasi torsi pengereman, (b) Efek torsi pengereman yang terlalu besar.
Gambar. 11. Arus baterai saat mode regeneratif.
Proseding Seminar Tugas Akhir Teknik Elektro FTI-ITS, Juni 2013 6
terjadi. Sedangkan ketika pulsa bernilai negatif adalah saat pengereman secara regeneratif terjadi. Porsi arus dari baterai untuk pengereman plugging dan arus menuju baterai saat pengereman regeneratif menentukan daya regeneratif yang diperoleh. Bila porsi pulsa negatif lebih besar dari pulsa positif berarti daya regeneratif lebih besar dari daya yang dikeluarkan baterai untuk pengereman plugging sehingga sistem mampu memberikan daya surplus untuk disimpan lagi dalam baterai seperti terlihat pada Gambar 12. Porsi arus ini tergantung dari duty cycle sinyal PWM yang diinjeksikan pada sistem penyalaan switch inverter. Duty cycle PWM diatur dengan mengubah sinyal referensi. Karena itulah sinyal ini selain berpengaruh terhadap torsi pengeraman elektris juga berpengaruh dalam mengatur kemampuan regeneratif sistem. Dari simulasi dengan rentang sinyal referensi 0,1 – 0,5 volt dapat diketahui bahwa kenaikkan SOC tidak linier terhadap sinyal referensi. Penambahan Ah baterai tertinggi terjadi saat sinyal referensi bernilai 0,3 yakni sebesar 0,00304 Ah atau sama saja baterai diisi (charge) dengan arus 10,9 A dalam satu detik (Gambar 13). Setelah itu akan turun lagi hingga saat
sinyal referensi 0,5 penambahan hanya sebesar 0,00106 Ah saja.
Besar surplus daya tergantung pada kecepatan putar motor, besar pulsa arus regeneratif dan juga periode switch mati (∆toff). Semakin tinggi arus regeneratif dan semakin lama ∆toff
maka surplus daya yang masuk ke baterai semakin besar. Saat sinyal referensi semakin besar maka pulsa arus regeneratif juga akan semakin tinggi namun hal sebaliknya terjadi untuk ∆toff. Periode ∆toff akan semakin pendek sebagai dampak akibat semakin besarnya duty cycle sehingga porsi pulsa negatif terus berkurang. Hal inilah yang menyebabkan kenaikkan SOC justru menjadi semakin turun ketika sinyal referensi pengereman dibuat lebih besar dari 0,3 volt meskipun pulsa arus regeneratif semakin tinggi nilainya.
IV. KESIMPULAN
1) Dengan mengacu pada kemampuan regeneratif dan torsi pengereman yang lebih tinggi dibandingkan pengereman mekanik maka metode regenerasi berbasis back EMF motor BLDC ini memberikan peningkatan performa pengereman motor yang jauh lebih baik dibandingkan penggunaan pengereman mekanik.
2) Pengaturan arus regeneratif dan torsi pengereman sistem dilakukan dengan mengubah nilai sinyal referensi pengereman namun harus dibatasi kurang dari sama dengan 0,3 volt agar sistem aman digunakan.
3) Kenaikkan SOC baterai tidak linier terhadap kenaikkan nilai referensi pengereman dimana nilai penambahan Ah baterai terbesar mencapai 0,00304 Ah saat sinyal referensi 0,3 volt.
DAFTARPUSTAKA
[1] M. Marchesoni and C. Vacca, “New DC–DC Converter for Energy
Storage System Interfacing in Fuel Cell Hybrid Electric Vehicles,”
IEEE Trans. Power Electron., vol. 22, no. 1, pp. 301–308, Jan. 2007. [2] S. Lu, K. A. Corzine, and M. Ferdowsi, “A New Battery/Ultracapacitor
Energy Storage System Design and I ts Motor Drive Integration for Hybrid Electric Vehicles,” IEEE Trans. Veh. Technol., vol. 56, no. 4,
pp. 1516–1523, Jul. 2007.
[3] Y. P. Yang and T. H. Hu, “A New Energy Management System of
Directly-Driven Electric Vehicle With Electronic Gearshift and Regenerative Braking,” in Proc. Amer. Control Conf., Jul. 2007, pp.
4419–4424.
[4] Yang Ming-Ji, Jhou Hong-Lin, Ma Bin-Yen, Shyu Kuo-Kai “A
Cost-Effective Method of Electric Brake With Energy Regeneration for Electric Vehicles”, IEEE Trans. Ind. Electron., vol. 56, no. 6, pp. 1168–
1176, June. 2009.
[5] C.H. Chen and M. Y. Cheng,”A New Cost Effective Sensorless
Commutation Method for Brushless DC Motors Without Phase Circuit and Nautral Voltage”, IEEE Trans. Power Electron., vol. 22, no. 2, pp.
644-653, Mar. 2007.
[6] P. Babu, K. R. Rajagopal, “Compact Regenerative Braking Scheme for
a PM BLDC Motor Driven Electric Two-Wheeler” Proceedings of the
IEEE Int. Conf. 2010. Gambar. 12. (a) Torsi pengereman, (b) Kecepatan motor, (c) Daya input
baterai, (d) SOC saat sinyal referensi pengereman 0,3 volt