9
KAJIAN PUSTAKA
2.1 Pengertian Agility
Agility didefinisikan sebagai kemampuan manuver dari tubuh, yaitu kemampuan merubah posisi dan arah tubuh atau bagian tubuh dengan cepat. Sedangkan menurut beberapa ahli lainnya, agility didefinisikan sebagai kemampuan untuk merubah arah dan posisi tubuh dengan cepat dalam keadaan bergerak, tanpa kehilangan keseimbangan. Faktor heriditer atau genetik merupakan faktor utama pada tingkat agility seseorang. Agility juga tergantung pada kekuatan otot, kecepatan, koordinasi, dan keseimbangan dinamik (Miller, 2010).
Agility adalah kemampuan untuk merubah arah dan posisi tubuh dengan cepat dalam keadaan bergerak, tanpa kehilangan keseimbangan. Pendapat para ahli bahwa agility adalah kemampuan untuk merubah arah dan posisi tubuh dengan cepat dalam keadaan bergerak, tanpa kehilangan keseimbangan. Agility terdiri pada beberapa komponen yaitu kekuatan otot, kecepatan, koordinasi, dan keseimbangan dinamik (Mark,2010).
Agility merupakan hal dasar yang dimiliki tubuh baik untuk beraktivitas fungsional, kemampuan dalam berolahraga seperti kemampuan untuk gerak cepat dan berhenti mendadak, perubahan arah dengan cepat, efisien dan penyesuaian gerak kaki pada tubuh atau bagian tubuh pada saat melakukan aktivitas olahraga. Setiap individu dengan agility yang baik memiliki kesempatan lebih baik untuk sukses dalam aktivitas fisik dibandingkan dengan individu dengan agility yang
buruk. Dikatakan demikian karena agility sendiri merupakan aspek dari beberapa kondisi fisik yang harus dimiliki untuk meningkatkan performa dan menghindari individu dari cidera (Jay, 2011).
2.1.1 Faktor – Faktor Yang Mempengaruhi Agility
Agility merupakan kombinasi dari kecepatan, kekuatan otot, kecepatan reaksi, keseimbangan, fleksibilitas, dan koordinasi neuromuskular. Dengan kata lain faktor –faktor yang mempengaruhi agility ialah kecepatan, kekuatan otot, keseimbangan, fleksibilitas, dan koordinasi neuromuscular.
1. Kekuatan otot
Kekuatan otot adalah kemampuan otot atau group otot menghasilkan tegangan dan tenaga selama usaha maksimal baik secara dinamis maupun statis. Kekuatan otot juga dapat diartikan sebagai kekuatan maksimal otot yang ditunjang oleh cross-sectional otot yang merupakan kemampuan otot menahan beban maksimal pada aksis sendi (Carolyn, 2007).
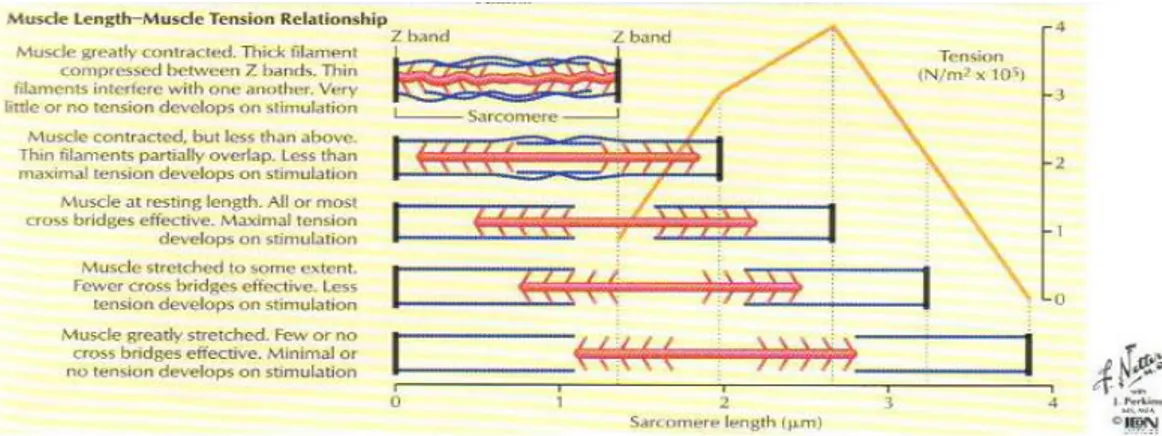
Otot dalam berkontraksi dan menghasilkan tegangan memerlukan suatu tenaga atau kekuatan. Kekuatan mengarah kepada output tenaga dari kontraksi otot dan secara langsung berhubungan dengan jumlah tension yang dihasilkan oleh kontraksi otot, sehingga meningkatnya kekuatan otot berupa level tension, hipertropi, dan rekruitment serabut otot. Karena kekuatan merupakan salah satu komponen dari kecepatan, maka semangkin besar kekuatan dalam melakukan suatu gerakan, semangkin besar pula tenaga eksplosif yang terjadi sehingga akan mampu mingkatkan agility (Carolyn, 2007).
2. Fleksibilitas
Fleksibilitas merupakan kemampuan untuk menggerakan sendi-sendi dalam jangkauan gerakan penuh dan bebas. Keluwesan otot dan kebebasan gerak persendian sering dikaitkan dengan hasil pergerakan yang terkoordinasi dan efisien. Kelenturan diarahkan kepada kebebasan luas gerak sendi atau ROM. Fleksibilitas juga faktor penting yang mempengaruhi agility. Semangkin lentur jaringan otot atau jaringan yang secara bersama-sama bekerja seperti sendi, ligament, dan tendon akan di dapat peningkatan agility (Carolyn, 2007).
3. Kecepatan
Kecepatan adalah kemampuan untuk melakukan gerakan-gerakan yang sejenis secara berturut-turut dalam waktu yang sesingkat-singkatnya, atau kemampuan untuk menempuh sesuatu jarak dalam waktu yang sesingkat-singkatnya. Kecepatan bukan hanya berarti menggerakan seluruh tubuh dengan cepat, akan tetapi dapat pula terbatas pada menggerakkan anggota-anggota tubuh dalam waktu yang sesingkat-singkatnya. Kecepatan adalah keterampilan dan kemampuan yang dibutuhkan untuk mencapai kecepatan pergerakan tinggi. Kecepatan tergantung dari faktor yang mempengaruhinya, yaitu kekuatan, waktu reaksi (reaction time), dan fleksibilitas. (Larry, 2004).
4. Keseimbangan
Keseimbangan adalah kemampuan untuk mempertahankan keseimbangan tubuh ketika ditempatkan di berbagai posisi. Keseimbangan adalah kemampuan
untuk mempertahankan pusat gravitasi pada bidang tumpu terutama ketika posisi tegak (Davies, 2004).
Selain itu keseimbangan adalah kemampuan untuk mempertahankan tubuh dalam posisi kesetimbangan maupun dalam keadaan statik atau dinamik, serta menggunakan aktivitas otot yang minimal. Keseimbangan melibatkan berbagai gerakan di setiap segmen tubuh dengan didukung oleh sistem muskuloskletal dan bidang tumpu. Kemampuan untuk menyeimbangkan massa tubuh dengan bidang tumpu akan membuat manusia mampu untuk beraktivitas secara efektif dan efisien. Keseimbangan merupakan interaksi yang kompleks dari integrasi atau interaksi sistem sensorik (vestibular, visual, dan somatosensorik termasuk proprioceptor) dan muskuloskeletal (otot, sendi, dan jaringan lunak lainnya) yang dimodifikasi atau diatur dalam otak (kontrol motorik, sensorik, basal ganglia, cerebellum, area asosiasi) sebagai respon terhadap perubahan kondisi internal dan eksternal (Thomas, 2005).
A. Komponen – Komponen Pengontrol Keseimbangan 1) Sistem Informasi Sensori
Sistem informasi sensori meliputi visual, vestibular, dan somatosensoris. Visual memegang peran penting dalam sistem sensoris. Keseimbangan akan terus berkembang sesuai umur, mata akan membantu agar tetap fokus pada titik utama untuk mempertahankan keseimbangan, dan sebagai monitor tubuh selama melakukan gerak statik atau dinamik. Dengan informasi visual, maka tubuh dapat menyesuaikan atau berinteraksi terhadap perubahan pada lingkungan aktivitas sehingga memberi kerja otot yang sinergis untuk mempertahankan keseimbangan tubuh. Komponen vestibular merupakan
sistem sensoris yang berfungsi penting dalam keseimbangan, kontrol kepala, dan gerak bola mata. Sistem vestibular bereaksi sangat cepat sehingga membantu mempertahankan keseimbangan tubuh dengan mengontrol otot-otot postural (Bryant, 2002).
2) Respon – Respon Otot Yang Sinergis (Postural Muscles Response Synergies)
Respon otot-otot postural yang sinergis mengarah pada waktu dan jarak dari aktivitas kelompok otot yang diperlukan untuk mempertahankan keseimbangan dan kontrol postur. Beberapa kelompok otot baik pada ekstremitas atas maupun bahwa berfungsi mempertahankan postur saat berdiri tegak serta mengatur keseimbangan tubuh dalam berbagai gerakan. Keseimbangan pada tubuh dalam berbagai posisi hanya akan dimungkinkan jika respon dari otot-otot postural bekerja secara sinergis sebagai reaksi dari perubahan posisi, titik tumpu, gaya gravitasi, dan aligment tubuh. Kerja otot yang sinergis berarti bahwa adanya respon yang tepat (kecepatan dan kekuatan) suatu otot terhadap otot yang lainnya dalam melakuakan fungsi gerak tertentu (Kevin, 2000).
3) Kekuatan Otot
Kekuatan otot dapat digambarkan sebagai kemampuan otot menahan beban baik berupa beban eksternal (external force) maupun beban internal (internal force). Kekuatan otot sangat berhubungan dengan sistem neuromuskuler yaitu seberapa besar kemampuan sistem saraf mengaktifasi
otot untuk melakukan kontraksi. Sehingga semangkin banyak serabut otot yang teraktifasi, maka semangkin besar pula kekuatan yang dihasilkan otot tersebut. Kekuatan otot kaki, lutut serta pinggul harus adekuat untuk mempertahankan keseimbangan tubuh saat adanya gaya dari luar. Kekuatan otot tersebut berhubungan langsung dengan kemampuan otot untuk melawan gaya grvitasi serta beban eksternal lainnya secara terus menerus mempengaruhi posisi tubuh (Kumar, 2004).
4) Kemampuan adaptasi (Adaptive System)
Kemampuan adaptasi akan memodifikasi input sensoris dan keluaran motorik (output) ketika terjadi perubahan tempat sesuai dengan karakteristik lingkungan.
5) Lingkup Gerak Sendi (Joint Range Of Motion)
Kemampuan sendi untuk membantu gerak tubuh dan mengarahkan gerakan terutama saat gerakan yang memerlukan keseimbangan tinggi (Carolyn, 2007).
B. Faktor - Faktor Yang Mempengaruhi Keseimbangan
Adapun faktor - faktor yang mempengaruhi keseimbangan adalah: 1) Pusat Gravitasi (Center Of Gravity – COG)
Pusat gravitasi terdapat pada semua objek, pada benda, pusat gravitasi terletak tepat ditengah benda tersebut. Pusat gravitasi adalah titik utama pada tubuh yang akan mendistribusikan massa tubuh secara merata. Bila tubuh
selalu ditopang oleh titik ini, maka tubuh dalam keadaan seimbangan. Pada manusia, pusat gravitasi berpindah sesuai dengan arah atau perubahan berat. Pusat gravitasi manusia ketika berdiri tegak adalah tepat di atas pinggang diantara depan dan belakang vertebrae sakrum ke dua. Derajat stabilisasi tubuh dipengaruhi oleh empat faktor, yaitu: ketinggian dari titik pusat gravitasi dengan bidang tumpu, ukuran tumpu, lokasi garis gravitasi dengan bidang tumpu, serta berat badan (John, 2008).
2) Garis Gravitasi (Line Of Gravity-LOG)
Garis gravitasi merupakan garis imajiner yang berada vertikal melalui pusat gravitasi dengan pusat bumi. Hubungan antara garis gravitasi, pusat gravitasi dengan bidang tumpu adalah menentukan derajat stabilitas tubuh (John, 2008).
3) Bidang Tumpu (Base Of Support-BOS)
Bidang tumpu merupakan bagian dari tubuh yang berhubungan dengan permukaan tumpuan. Ketika garis gravitasi tepat berada di bidang tumpu, tubuh dalam keadaan seimbang. Stabilitas yang baik terbentuk dari luasnya area bidang tumpu. Semangkin bessar biddang tumpu, semangkin tinggi stabilitas. Misalnya berdiri dengan kedua kaki akan lebih stabil dibanding berdiri dengan satu kaki. Semangkin dekat bidang tumpu dengan pusat gravitasi, maka stabilitas tubuh mangkin tinggi (John, 2008).
5. Kecepatan Reaksi
Kecepatan reaksi adalah waktu yang diperlukan untuk memberikan respon kinetik setelah menerima suatu stimulus atau rangsangan. Karena melalui rangsangan (stimulus) reaksi tersebut mendapat sumber dari: pendengaran, pandangan (visual), rabaan maupun gabungan antara pendengaran dan rabaan. Neurofisiologis melibatkan potensiasi perubahan karakteristik kekuatan kecepatan komponen kontraktil otot disebabkan oleh bentangan aksi otot konsentris dengan menggunakan reflex regang. Reflex regang adalah respon paksa tubuh untuk stimulus eksternal yang membentang otot (Nenggala, 2007).
6. Koordinasi Neuromuscular
Merupakan kemampuan untuk mengintegrasi indera (visual, auditori, dan proprioceptive untuk mengetahui jarak pada posisi tubuh) dengan fungsi motorik untuk menghasilkan akurasi dan kemampuan bergerak. Selain itu masih terdapat faktor – faktor lain yang mempengaruhi agility yaitu:
a) Usia : The Shuttle Run 30 feet, menunjukan bahwa anak laki-laki rata-rata mangkin bertambah baik mulai usia 12 tahun, sedang anak wanita tidak lagi bertambah baik setelah usia 13 tahun.
b) Jenis Kelamin : Anak pria memperlihatkan kelincahan yang lebih baik dari pada wanita sebelum mereka mencapai usia pubertas. Setelah pubertas perbedaan tersebut lebih mencolok.
c) Berat Badan : Berat badan yang berlebihan secara langsung akan mengurangi kelincahan. Dimana berat badan yang berlebihan cenderung mengakibatkan muscle imbalance di bagian trunk.
d) Kekelahan : Kelelahan dapat mempengaruhi kelincahan, karena orang yang lelah akan menurun kecepatan lari dan koordinasinya.
2.1.2 Agility Pada Remaja
Pada remaja kemampuan berkembang secara fisik masih sangat baik. Waktu utama untuk pertumbuhan otot yang optimal adalah pada akhir masa remaja antara usia 18-19 tahun dan sepanjang usia 20 tahun. Pada kisaran ini kadar testosteron berada pada puncaknya yang disebut dengan masa pubertas. Pada usia ini remaja sudah memiliki komponen kebugaran yang bersifat keterampilan seperti; koordinasi, kecepatan, ketepatan, daya ledak, dan agility. Komponen yang terdapat dalam agility yang harus dimiliki oleh remaja adalah kekuatan otot, fleksibilitas, kecepatan, keseimbangan, dan koordinasi neuromuskular. Manfaat agility pada remaja pada umumnya memfasilitasi gerakan-gerakan dengan segala kelincahan yang dimilikinya pada usia produktif seorang remaja (Mark, 2010).
Pengukuran Agility pada remaja dengan tes right-boomerang run, di kategorikan menjadi 5 tingkatan seperti pada tabel dibawah ini (Tomchuk, 2011).
Table 2.1
Nilai Tingkat Agility (dalam detik) menggunakan Right-Boomerang Run Test.
Tingkat kinerja Skor (detik)
Laki-laki Perempuan Tingkat tinggi ≤ 10.79 ≤ 12.60 Lanjutan menengah 11.49 – 10.80 12.99 – 12.61 Menengah 12.60 – 11.50 14.59 - 13.00 Lanjutan pemula 13.90 – 12.61 15.99 – 14.60 Pemula ≥ 13.91 ≥ 16.00
2.2 Fisiologi Otot Rangka
Otot skeletal mempunyai 4 karakter yaitu, eksitabilitas, kontraktilitas, ekstensibilitas, elastisitas. Empat karakter ini membuat otot skeletal dapat merespon stimulus dari impuls saraf, dapat berkontraksi dengan memendekkan ukurannya, dapat terulur dan kembali ke bentuk dan panjang semula setelah memendek atau memanjang. Kontraksi yang terjadi pada otot ini adalah kontraksi yang disadari. Fungsinya adalah sebagai penggerak tubuh, mempertahankan dan memelihara postur, dan memproduksi panas (Guyton, 2006).
Gambar. 2.1. Struktur Otot Skeletal
Sumber: Hansen John T & Bruce M Koeppen (2002), Netter’s Atlas of Human Physiology
Otot skeletal melekat pada tulang melalui tendon yang terdiri dari jaringan ikat, jaringan ikat ini juga menyelubungi seluruh otot yang disebut sebagai epimisium. Satu bagian dari otot skeletal terdiri dari banyak fasikulus yang dibungkus oleh jaringan ikat yang bernama perimisium. Fasikulus sendiri terdiri dari banyak serabut otot, atau sel otot yang juga diselubungi oleh jaringan ikat yang disebut endomisium (John, 2002).
Sel otot disusun oleh banyak myofibril yang terbuat dari molekul protein panjang yang disebut miofilamen. Ada dua jenis miofilamen dalam miofibril, yaitu miofilamen tebal dan miofilamen tipis. Miofilamen tebal berwarna lebih gelap dari miofilamen tipis sehingga otot skeletal disebut juga otot lurik karena dalam pandangan mikroskopik terlihat susunan kedua miofilamen tadi yang berbeda warna dan membentuk pola lurik (John, 2002).
Miofilamen tebal dan miofilamen tipis membentuk sebuah subunit yang saling bersambung dalam miofilamen yang disebut sebagai sarkomer, Dalam sebuah sarkomer thin miofilamen terletak di pinggir mengapit miofilamen tebal. Sehingga dalam pandangan mikroskopik tampak daerah pinggir sarkomer lebih terang dengan tengah yang yang berwarna lebih gelap, daerah terang disebut dengan band dan daerah gelap disebut dengan A-band. Pada tengah tengah I-band tampak garis gelap yang memisahkan dua sarkomer yang diberi nama Z-Line. Jadi sarkomer merupakan daerah antara dua Z-line (John, 2002).
Gambar 2.2 Struktur Myofilamen, Thick and Thin Myofilamen
Sumber: Hansen John T & Bruce M Koeppen (2002), Netter’s Atlas of Human Physiology
Sel otot diselubungi oleh membran yang bernama sarkolemma, yang seperti neuron, memiliki potensial membran. Impuls yang berasal dari neuron akan
berjalan juga ke sarkolemma yang mengakibatkan sel otot untuk berkontraksi. Sarkolemma mempunyai lubang didalam strukturnya yang disebut tubulus melintang, tubulus melintang masuk ke dalam sel otot keseluruh miofibril tanpa menembusnya dan berfungsi untuk menghantarkan impuls dari sarkolemma kedalam sel terutama pada struktur lain dalam sel yang menyelubungi myofilamen yang disebut sarkopasmik retikulum (Guyton, 2006).
Tubulus melintang mempunyai lubang yang berhubungan dengan sarkoplasmik retikulum untuk menghantarkan impuls. Sarkoplasmik retikulum mempunyai fungsi utama sebagai gudang penyimpanan ion kalsium. Antara Sarkoplasmik retikulum dengan sitoplasma sel otot yang disebut sarkoplasma, terjadi mekanisme pemompaan kalsium. Apabila otot dalam kondisi relaks maka ada penumpukan ion kalsium yang sangat tinggi dalam sarkoplasmik retikulum dan sebaliknya konsentrasi ion kalsium dalam sarkoplasma rendah (Guyton, 2006).
Ketika impuls dari saraf datang pada membran sarkoplasmik retikulum maka terjadi pembukaan membran yang memungkinkan ion kalsium untuk melewatinya menuju pada sarkoplasma yang akan mempengaruhi miofibril untuk berkontraksi.
Miofilamen tebal merupakan komposisi dari sebuah protein yang disebut miosin. Sebuah miosin mempunyai ekor yang mempunyai kepala yang keluar dari filamen, yang nantinya membentuk sebuah cross-bridges dengan molekul aktin dari miofilamen tipis. (Guyton, 2006).
Kepala miosin tersebut mempunyai dua tempat tautan yaitu, ATP Binding Site, dan Actin Binding Site. Ketika kepala ini bertemu dengan molekul aktin
dalam miofilamen maka akan terjadi pergesaran miosin yang mengakibatkan sel otot berkontraksi .
Miofilamen tipis sendiri terdiri dari 3 komponen protein, yaitu aktin, tropomiosin dan troponin. Aktin berupa bulatan yang lonjong yang saling bergandengan membentuk dua rantai actin yang panjang dalam miofilamen tipis, tropomiosin seperti benang yang membelit rantai aktin, ujung dari masing-masing tropomiosin adalah molekul troponin.
Pada otot yang relaks maka molekul miosin menempel pada benang molekul tropomiosin, ketika ion kalsium mengisi troponin maka akan mengubah bentuk dan posisi troponin, perubahan ini membuat molekul tropomiosin terdorong dan menjadikan kepala miosin bersentuhan dengan molekul aktin. Persentuhan ini akan menjadikan kepala miosin bergeser. Selama pergeseran ini kepala miosin menempel erat pada aktin sehingga mendorong aktin untuk bergerak.
Pada akhir gerakan ATP masuk dalam cross bridges dan memecah ikatan antara miosin dan aktin. Kepala miosin akan bergerak kembali kebelakang, pada saat bergerak ke belakang ATP dipecah sebagai ADP + P dan kepala miosin kembali berikatan dengan molekul aktin yang lain, ikatan ini membuat terjadinya lagi gerakan aktin terdorong oleh kepala miosin.
Selama ion kalsium mengisi troponin maka proses ini akan terjadi berulang, tampak bahwa miofilamen tebal dan tipis seperti bergeser satu sama lain, pada saat terjadi geseran maka jarak antara dua Z-line dalam sarkomer akan memendek, akibatnya miofibril akan memendek dan seluruh sel otot akan memendek dan otot akan tampak berkontraksi.
Otot skeletal akan relaks bila tidak ada impuls saraf melalui motor end plates, ketiadaan impuls mengakibatkan tak ada ion kalsium yang masuk ke sitoplasma sel karena pintu untuk kalsium masuk menjadi tertutup, dan kalsium akan kembali mengalir masuk dalam sarkoplasmik retikulum, aliran ini akan menjadikan posisi troponin kembali normal sehingga posisi tropomiosin kembali normal dan memutuskan hubungan antara kepala miosin dengan aktin. Ketika kepala miosin tak lagi berhubungan dengan aktin maka tak ada pergeseran molekul yang terjadi dan otot kembali relaks.
Pada kejadian lain, ketika kontraksi otot berlangsung dalam waktu yang lama, maka terjadi penurunan jumlah ATP yang dibutuhkan untuk menggeser molekul-molekul tadi bergeser. Walaupun kepala miosin masih menempel pada aktin, karena konsentrasi ion kalsium masih cukup untuk menggerakkan troponin, namun tak ada pergeseran yang terjadi karena ketiadaan energi untuk menggerakkan. Kejadian ini disebut muscle fatigue.
Pada kondisi relaks pada otot tetap terjadi tegangan pada sel otot yang menjaga postur tubuh. Ini merupakan sebuah bentuk refleks pusat yang mengatur agar ketegangan otot memadai berdasarkan impuls dari saraf propioseptor otot tanpa menimbulkan gerakan.
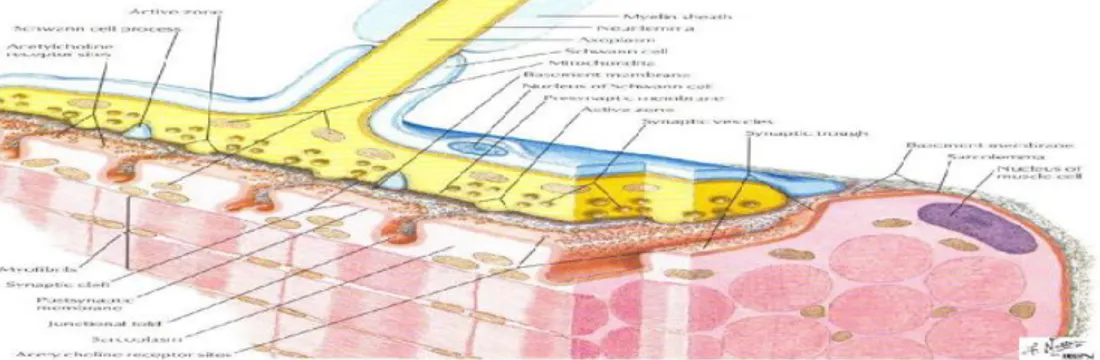
Kontraksi otot skeletal berawal dari impuls elektrik yang berasal dari saraf motorik. Komunikasi antara sistem saraf dengan otot menggunakan sebuah ikatan yang disebut neuromuscular junction. Hubungan antar dua sel ini seperti hubungan sinapsis antara dua neuron. Ketika impulse masuk ke ujung saraf (end plate), neurotransmitter (asetilkoline) dilepaskan ke neuromuscular junction dan
masuk ke dalam membran sel otot (sarkolemma) yang akan meningkatkan permeabilitas membran terhadap natrium (Na+), natrium akan menyebar melalui tubulus melintang ke arah sarkoplasmik retikulum dan menyebabkan potensial membran menjadi negatif dan memungkinkan kalcium untuk masuk dari sarkoplasmik retikulum ke dalam sarkoplasma yang akan menjadikan sel otot untuk berkontraksi (Guyton, 2006).
Gambar 2.3 Neuromuscular junction
Sumber: Hansen John T & Bruce M Koeppen (2002), Netter’s Atlas of Human Physiology
Ada dua tipe kontraksi otot skeletal, yaitu isotonik dan isometrik. Kontraksi Isotonik terdiri dari dua macam jenis kontraksi yang disebut konsentrik dan eksentrik. Kontraksi konsentrik terjadi bila kontraksi membuat otot memendek dan dapat menggerakkan sendi. Kontraksi eksentrik lebih berupa kontraksi otot pada saat memanjang untuk menahan beban. Kontraksi isometrik adalah kontraksi otot tanpa disertai perubahan panjang otot (Guyton, 2006).
Kontraksi otot skeletal dapat menghasilkan kekuatan yang bervariasi, variasi ini tergantung dari berapa banyak motor unit yang teraktivasi. Motor unit adalah kombinasi antara motor neuron dan sel otot yang disarafinya. Di dalam struktur
otot skeletal ada banyak sekali motor unit. Semakin banyak jumlah motor unit yang terstimulsi akan semakin menguatkan kontraksi otot (Guyton, 2006).
2.3 Anatomi dan Biomekanik
2.3.1 Anatomi dan Biomekanik Sendi Lutut
Secara anatomi sendi lutut adalah sendi terbesar pada tubuh manusia. Sendi ini termasuk jenis synovial hinge joint dengan gerakan yang terjadi fleksi dan ekstensi. Fungsi dari sendi lutut itu sendiri adalah mempertahankan tegaknya tubuh, stabilisasi serta meredam tekanan. Karena struktur dan fungsinya yang kompleks, maka sendi lutut memiliki susunan anatomi dan biomekanik yang berbeda, sesuai dengan struktur pembentuknya. Fungsi utama dari knee joint adalah membentuk sikap tubuh, gerak “weight transfer”, melompat, mendorong, menarik.
A. Struktur Tulang
Sendi lutut dibentuk oleh tiga tulang yaitu tulang femur, tibia, dan patella. 1) Tulang femur: tulang femur merupakan tulang terpanjang dan terbesar
dalam tubuh manusia yang bertugas meneruskan berat tubuh dari tulang coxae ke tibia sewaktu kita berdiri. Bagian proksimal dari tulang ini terdiri dari caput femoris yang bersendi dengan acetabullum, collum femoris dan dua trochanter major. Ujung distal tulang femur berakhir menjadi dua condylus yaitu epicondylus medialis dan epicondylus lateralis yang bersendi dengan tibia.
2) Tulang tibia: tulang tibia merupakan tulang kuat satu-satunya yang menghubungkan antara femur dengan pergelangan kaki dan tulang kaki, serta merupakan tulang penyangga beban. Bagian proksimal tulang ini bersendi dengan condylus femur dan bagian distal memanjang ke medialis membentuk malleolus medialis yang bersendi dengan talus.
3) Tulang patella: patella merupakan tulang sesamoid terbesar pada tubuh manusia. Tulang ini berbentuk segitiga yang basisnya menghadapi ke proximal dan apex/puncaknya menghadap ke distal. Tulang ini mempunyai dua permukaan, yang pertama menghadap ke sendi (facies articularis) dengan femur dan yang kedua menghadap ke depan (facies anterior). Facies anterior dapat dibagi menjadi tiga bagian dan bergabung dengan tendon quadriceps. Pada sepertiga atas merupakan tempat perlekatan tendon quadriceps, pada sepertiga tengah merupakan tempat beradanya saluran vascular dan pada sepertiga bawah termasuk apex merupakan tempat awal ligamentum patella.
gambar 2.4 knee
B. Articulatio Knee Joint
Sendi lutut atau knee joint dibentuk oleh tiga persendiaan, yaitu : tibiofemoral joint, patellofemoral joint, dan proksimal tibiofibular joint yang ditutupi oleh kapsul sendi.
1) Tibiofemoral joint merupakan sendi dengan jenis synovial hinge joint yang mempunyai 2 derajat kebebasan gerak, dibentuk oleh condylus femoris dan mempunyai permukaan tidak rata yang dilapisi oleh tulang rawan yang tebal dan meniscus.
2) Patellofemoral joint merupakan sendi dengan jenis modified plane joint dan terletak diantara tulang femur dan patella. Sendi ini berfungsi membantu mekanisme kerja dan mengurangi friction quadriceps.
C. Jaringan spesifik pada sendi lutut 1) Ligamen
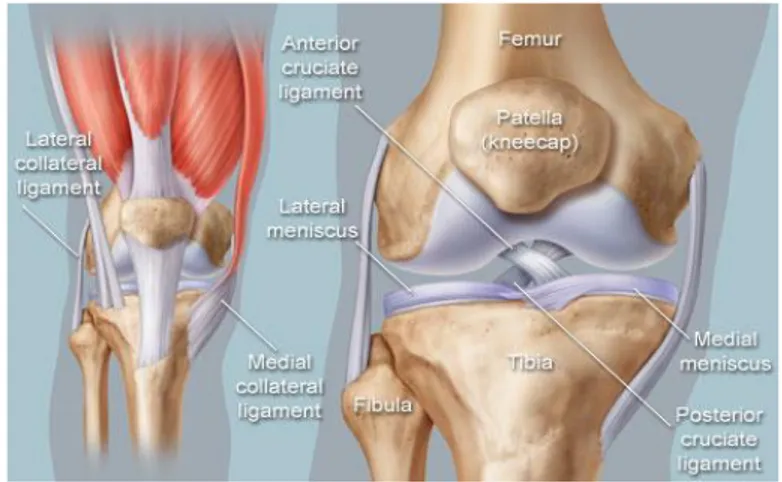
Fungsi stabilisasi pasif sendi lutut dilakukan oleh ligamen. Ligamen-ligamen yang terdapat pada lutut adalah :
a. Ligamen cruciatum anterior membentang dari bagian anterior fossa intercondyloid tibia melekat pada bagian lateral condylus femur yang berfungsi untuk mencegah gerakan slide tibia ke anterior terhadap femur, mencegah hiperekstensi lutut dan membantu saat rolling dan gliding sendi lutut.
b. Ligamen cruciatum posterior merupakan ligamen berbentuk kipas membentang dari bagian posterior tibia ke bagian depan atas dari fossa intercondyloid tibia melekat pada bagian luar depan condylus
medialis femur. Ligamen ini berfungsi mengontrol gerakan slide tibia kebelakang terhadap femur, mencegah hiperekstensi lutut dan memelihara stabilitas sendi lutut.
c. Ligamen collateral medial merupakan ligamen yang lebar, datar dan membranosus bandnya terletak pada sisi tengah sendi lutut. Ligamen ini terletak diposterior permukaan medial sendi tibiofemoral. Ligamen collateral medial menegang pada gerakan penuh ROM ekstensi lutut. Ligamen ini berfungsi mejaga gerakan ekstensi dan mencegah gerakan ke arah luar.
d. Ligamen collateral lateral merupakan ligamen kuat dan melekat di atas ke belakang epicondylus femur dan dibawah permukaan luar caput fibula. Ligamen ini berfungsi mengawasi gerakan ekstensi dan mencegah gerakan ke arah medial. Dalam gerak fleksi lutut ligamen ini melindungi sisi lateral lutut.
e. Ligamen patellaris merupakan ligamen kuat dan datar yang melekat pada lower margin patella dengan tuberositas tibia dan melewati bagian depan atas patella dan serabut superficial yang berlanjut pada pusat serabut pada tendon quadriceps femoris. f. Ligamen popliteal oblique menutupi bagian belakang sendi dan
melekat di atas upper margin fossa intercondyloid dan permukaan belakang femur dan dibawah margin posterior caput tibia. Bagian tengah terpadu dengan otot gastrocnemius. Ligamen ini berfungsi mencegah hiperekstensi lutut.
g. Ligamen transversal merupakan ligamen yang pendek dan tipis dan berhubungan dengan margin convex depan meniscus lateral dan ujung depan meniscus medial. Selain itu terdapat tractus illiotibial yang berfungsi seperti ligamen yang menghubungkan crista iliaca dengan condylus latelar femur dan tuberculum lateral tibia. Pada sendi lutut tractus illiotibial berfungsi untuk stabilisasi ligamen antara condylus lateral femur dengan tibia.
Gambar 2. 5 Ligamen Of Knee Joint
http://www.webmd.com/pain-management/knee-pain/picture-of-the-knee
2) Meniscus
Meniscus merupakan struktur yang mengelilingi fibrocartilage pada permukaan articularis caput tibia. Pada bagian perifer meniscus relatif lebih tebal dan pada bagian dalam sedikit tipis. Meniscus terdiri dari jaringan penyambung dengan bahan-bahan serabut collagen yang juga mengandung sel-sel seperti tulang rawan.
Meniscus dibagi menjadi dua bagian yaitu meniscus medial dan meniscus lateral. Meniscus lateral berbentuk seperti huruf O yang berada lebih dekat dengan facetsarticularis, pusat sendi dan terkait
dengan eminenceintercondyloid. Meniscus medial berbentuk seperti huruf C, yang letaknya lebih luas ke belakang dan terkait pada fossaintercondyloid.
Fungsi meniscus adalah membantu mengurangi tekanan femur di atas tibia, menambah elastisitas sendi, menyebar tekanan pada cartilago sehingga menurunkan tekanan antara dua condylus, mengurangi friction selama gerakan serta membantu ligamen dan capsul sendi dalam mencegah hiperekstensi sendi.
D. Otot- Otot Knee Joint
Otot-otot lutut dibsgi dalam dua group otot yaitu group otot ektensor dan group otot fleksor.
1. Group otot ekstensor yaitu M.Quadriceps: a) M. Rectus Femoris
Origo: ada dua tendon satu melekat di SIAS, satu lagi melekat dicekungan diatas acetabulum.
Insersio: permukanaan patella sampai ke tuberositas tibie. Inervasi: N.Femoralis (L2)
b) M.Vastus Medialis
Origo : Interochanter line, line aspira, medial supracondilair line femur.
Insertio: melekat ditepi lateral patella dan melewati ligamentum patella sampai ankle tuberositas tibia.
c) M.Vastus Intermedius
Origo: permukaan anterior dan lateral 2/3 atas femur.
Insersio: Permukaan lateral dan melalui ligamentum patella sampai tuberositas tibie.
Inervasi: N femoralis (L2-L4) d) M. Vastus Lateralis
Origo: Trochanter major femur, introchanter line, line aspira, tuberositas gluteal.
Insersio: melekat ditepi lateral patella dan melewati ligamentum patella sampai ankle tuberositas tibia
Inervasi: N. Femoralis (L2-L4)
2. Group Otot Fleksor yaitu M. Hamstring terdiri dari: a) Biceps Femoris
Origo; long head: tuberositas ichial
Short head: lateral lip linea aspira femur dan lateral intermuskular femur.
Insersio: melekat disisi lateral caput fibula dan dengan melalui serabut kecil melekat di condilus lateral tibie.
Inervasi: cabang tibialis N. Ischiadicus (L5,S1,S2) b) M. Senitendineus
Origo: melekat dicekungan medial distal tuber ichiadikum
Insersio: pada bagian proksimal facies medialis facia cruris profunda dan terletak disebelah tendo m.sartorius.
Inervasi: cabang tibialis N. Ischiadikus (l5,S1,S2) c) M. semimembranosus
Origo: dibagian proksimal dan permukaan luar tuberositas ischiadikum
Insersio: Kondilus medialis tibie
Inervasi: cabang tibial N. Ischiadikus (L5,S1,S2)
3. Kelompok Otot Pes Anserinus
a) M. Sartorius: berasal dari spina illiaca anterior dan berjalan miring melewati paha dalam facianya menuju ke pes anserinus superficial dan diletakan pada fascia cruralis dan medialis terhadap tuberositas tibia. M Sartorius bekerja pada dua sendi, sebagai fleksor pada sendi lutut dan bila lutut fleksi, bersama-sama dengan otot lain pes anserinus berfungsi sebagai rotator medialis tungkai bawah. Selain itu juga sebagai fleksor pada sendi panggul. Berdasarkan jalannya otot tersebut juga berfungsi sebagai rotator lateralis pada sendi panggul. M. Sartorius dipersarafi oleh N. femoralis (L2-L3)
b) M. Gracillis: Hanya kelompok otot-otot adductor bekerja pada dua sendi, otot ini membentang sampai sejauh fascies medialis tibia yang berinsersio bersama dengan m.semitendinosus dan m,Sartorius sebagai pes anserinus superficialis otot ini terletak paling medialis langsung dibawah permukaan dan bila paha adduksi tampak jelas gambaran lengkungannya dibawah kulit. Bila lutut dilakukan ekstensi m.gracillis bekerja sebagai adductor paha
dan fleksor sendi panggul begitu juga dapat melakukan fleksi sendi lutut. Pada daerah pes anserinus di antara tiga tendo insertion otot tersebut dan tibia selalu terdapat bursa yaitu bursa anserina. M. gracillis dipersarafi oleh N.Obturatorius r.anterior (L2-L4)
c) M. semitendinous: berasal dari tuber ischiadicum dan berjalan ke fascies medialis tibia bersama-sama dengan m.gracilis dan m.sartorius untuk bergabung dengan pes anserinus supereficialis. Disini juga terdapat bursa anserine diantara permukaan tibia dan terdapat perlekatan paada pes anserinus. Otot ini bekerja pada dua sendi, ekstensi pada sendi panggul dan fleksi pada sendi lutut dari rotasi medialis tungkai bawah.
d) M. tensor fascia latae: berasal dari daerah spina illiaca anterior superior dan membentang kedistal sampai trochanter major terus ke tractus illiotibialis, berinsertio pada condylus lateralis tibia. Otot menekan caput femoralis ke acetabulum. Otot ini juga sebagai fleksor, rotator medialis dan abductor, serta membantu berkas-berkas anterior m.gluteus medius dan m.gluteus minimus. M.tensor fascia latae dipersarafi oleh N.Gluteus Superior (L4-L5)
e) M. gstrocnemius: Berasal dari bagian proksimal condylus medialis femoris dengan caput medial dan caput lateral disebelah proksimal condylus lateralis femoris. Beberapa serabut dari caput medial dan caput lateral juga berasal dari capsula articularis sendi lutut. Kedua caput tersebut berjalan kedistal, membentuk batas inferior fossa poplitea dan bergabung dengan tendo m.soleus. otot-otot tersebut
berinsertio pada calcanei. Pada saat lutut fleksi m. gastrocnemius memendek. Oleh karena itu m.gastrocnemius sangat penting pada proses berjalan yang tidak hanya berperan mengangkat tumit juga pada fleksi lutut.
E. Osteokinematik dan Artrokinematik lutut 1) Ostekinematik
Osteokinematik adalah gerak sendi yang dilihat dari gerak tulang saja. Pada osteokinematik gerakan yang terjadi berupa gerak rotasi ayun, rotasi putar, dan rotasi spin. Sendi tibiofemoral merupakan sendi synovuial hinge (sendi engsel) dengan dua derajat kebebasan gerak rotasi ayun dan spin sebagai gerak fisiologis. Fleksi-ekstensi terjadi pada bidang sagital di sekitar axis medio-lateral dengan gerak rotasi ayun. Eksternal rotasi-internal rotasi terjadi pada bidang ternasversal di sekitar axis vertical (longitudinal) dengan gerak rotasi spin pada posisi kaki menekuk. Ketidaksesuaian sendi tibiofemoral dikombinasikan dengan aktifitas otot dan penguluran ligament akan menghasilkan gerakan rotasi secara otomatis. Gerak rotasi yang terjadi secara otomatis. Gerak rotasi yang terjadi secara otomatis ini terdapat secara primer pada gerak ektensi penuh sebagai gerak perhentian dari kondilus lateral yang lebih panjang.
Pada ekstensi terakhir terjadi rotasi eksternal tibia yang dikenal closed rotation phenomen. Disamping itu juga terjadi gerak valgus. ROM pasif gerak fleksi umumnya sekitar 130°-140°. Hiperekstensi berkisar 5°-10° dalam bats normalnya. Gerak rotasi yang terbesar terjadi pada posis lutut
fleksi 90°, dimana lateral rotasinya sebesar 45° dan medial rotasi sebesar 15°.
2) Artrokinematik
Arthokinematik adalah gerakan yang terjadi pada permukaan sendi. Pada arthokinematik gerakan yang terjadi berupa gerak roll dan slide. Dari kedua gerak tersebut dapat diuraikan lagi menjadi gerak traksi-kompresi, translasi, dan spin. Asimetri dari sendi tibiofemoral dan kenyataan bahwa permukaan sendi pada femur lebih dari pada tibia (saat kondisi weigh bearing). Condylus femoral harus melakukan gerakan rolling kea rah posterior dan sliding kea rah anterior. Pada gerak ekstensi, condylus femoralis rolling kea rah anterior dan sliding kea rah posterior. Pada akhir gerak ekstensi, gerakan dihentikan pada condylus femoralislateral, tapi sliding pada condylus medial tetap berlanjut untuk menghasilkan penguncian sendi.
Pada gerak aktif non weight bearing permukaan sendi p[ada tibia concave melakukan gerak slide pada condylus femoral yang conceks dengan arah gerakan searah sumbu tulang tibia. Condylus tibia melakukan gerak slide kea rah posterior pada condylus femoral saat fleksi. Selama ekstensi dari gerak full fleksi condylus tibia bergerak kea rah anterior pada condylus femoral. Patella bergeser ke arah superior saat ekstensi, dan bergeser ke inferior saat fleksi. Beberapa gerak rotasi patella dan tilting yang terjadi berhubungan dengan gerak sliding saat fleksi dan ekstensi.
Artrokinematik adalah gerakan yang terjadi pada permukaan sendi. Pada artrokinematik gerakan yang terjadi berupa gerak roll and slide. Dari kedua gerak tersebut dapat diuraikan lagi menjadi gerak traksi – kompresi, translasi, dan spin.
Incongruence dari sendi tibiofemoral dan kenyataan bahwa permukaan sendi pada femur lebih besar daripada tibia (saat kondisi weight bearing). Condylus femoral harus melakukan gerak rolling dan sliding untuk tetap berada diatas tibia. Pada gerak fleksi dengan weight bearing, condylus femoris rolling ke arah posterior dan sliding ke arah anterior. Pada gerak ekstensi condylus femoralis rolling ke arah anterior dan sliding ke arah posterior, gerakan dihentikan condylus femoralis lateral, tapi sliding pada condylus medial tetap berlanjut untuk menghasilkan penguncian sendi.
Pada gerakan aktif non weight bearing, permukaan sendi pada tibia yang concave melakukan gerak slide pada condylus femoral yang conveks dengan arah gerakan searah sumbu tulang tibia. Condylus tibia melakukan gerak slide ke arah posterior pada condylus femoral saat fleksi. Selama ekstensi dari gerak full fleksi condylus tibia bergerak ke arah anterior pada condylus femoral. Patella bergeser ke arah superior saat ekstensi, dan bergeser ke inferior saat fleksi. Beberapa gerak rotasi patella dan tilting yang terjadi berhubungan dengan gerak sliding saat fleksi dan ekstensi.
2.3.2 Anatomi Dan Biomekanik Ankle And Foot Joint
Regio ankle and foot joint merupakan struktur yang komplek dan yang paling dinamis pada tubuh manusia. Ankle and foot joint bergerak
bersama-sama dengan anggota tubuh lainnya selama berdiri dan berjalan. Talus merupakan mekanisme kunci pada puncak kaki, terdiri dari bagian corpus, colum dan caput. Bagian superior dan pinggir corpus berfungsi menyokong dan berartikulasi dengan tibia dan fibula.
A. Osteologi
Ankle and foot dibentuk oleh ujung distal sebagai “garpu” bersendi langsung dengan:
1) Os tallus (sendi paling atas) 2) Os calcaneus
3) Os Navicularis 4) Os Cuboideus
5) Os cuneiforme lateral, middle, dan medial 6) Ossa metatarsal (5 buah)
7) Ossa Phalageal (14 buah)
Dua arcus pada pergelangan kaki yaitu arcus longitudinal dan arcus transversal:
1) Arcus longitudinal: merupakan kontinum dari calcaneus dan caput metatarsal.
2) Arcus transversal: bagian proksimal dibatasi os cuboideum, lateral cuneiforme lebih cekung dan pada bagian distal oleh caput metatarsalia yang lebih datar.
B. Otot Pada Ankle Joint 1) M. gastrocnemius
Berasal dari bagian proksimal condylus medialis femoris dengan caput medial dan dengan caput lateral disebelah proksimal condylus lateralis femoris. Beberapa serabut dari caput medial dan caput lateral juga berasal dari capsula articularis sendi lutut. Kedua caput tersebut berjalan ke distalis, membentuk batas inferior fossa poplitea dan bergabung dengan tendo m.soleus, otot-otot tersebut berinsertio pada tuber calcanei. Fungsinya untuk plantar fleksi pedis, fleksi cruris serta cendrung untuk supinasi pedis.
2) M. soleus
Berasal dari caput fibula dan sepertiga atas facies dorsalis fibula, dari linea musculi solei pada tibia dan dari arcus tendineus antara caput fibula dan tibia yaitu arcus tendineus musculi solei terletak di distalis m.popliteus. ujung tendo besar otot bersatu dengan ujung tendo m.gastrocnemius dan berinsertio pada tubercalcanei sebagai tendo calcaneus (achilles tendon). Fungsinya untuk plantar fleksi pedis. 3) M. tibialis anterior
Berasal dari daerah yang lebar yaitu facies lateralis tibia, membrane interossea dan fascia cruris. Otot ini mempunyai venter tiga sisi yang berakhir pada tendo yang berjalan dibawah retinaculum musculorum extensorum superior dan retinaculum musculorum extensorum inferior dan dibungkus oleh selubung synovial. Otot ini berinsertio pada facies plantaris os cuneiforme medial dan os metatarsal pertama. Otot ini di
innervasi oleh n. peroneus (fibularis) profundus L4-L5. Fungsinya untuk dorsal fleksi dan supinasi (adduksi dan inverse) pedis.
4) M. tibialis posterior
Berasal dari membrane interossea dan permukaan tibia yang berhubungan dengan fibula. Tendo turun ke bawah pada sulcus malleolus di belakang malleolus medial dalam selubung synovial di antara sustenaculum tali dan tuberositas ossis navicularis dan sampai ke telapak kaki. Otot ini dibagi atas dua bagian. Yang tebal adalah pars medial melekat pada tuberositas ossis navicularis, sedangkan bagian lateral merupakan bagian lemah, berinsertio pada ketiga tulang cuneiforme. Insertio otot ini dapat memanjang sampai ke basis ossa metatarsalia II, III, dan IV. Otot ini di innervasi oleh N. tibialis (L4-L5). Fungsinya untuk supinasi (adduksi dan inverse) dan plantar fleksi pedis.
5) M. peroneus longus
Berasal dari capsula articularis sendi tibiofibularis, caput fibula dan bagian proksimal fibula. Otot ini berakhir berupa tendo panjang yang berjalan dibelakang malleolus lateralis melewati alur dibelakang malleolus fibularis di dalam selubung synovial bersama dengan tendo m.peroneus brevis, berjalan dibawah retinaculum musculorum perineum superius. Tendo m.peroneus longus membentang ke distal trochlea peroneal calcanei dalam suatu lekukan selubung synovial bersama yang difikasai oleh retinaculum perineum inferius, menyilang facies plantaris ke tuberositas ossis metatarsalis primi dan os
cuneiforme medial. Tendo ini mencapai tempat insertion dengan jalan melalui sulcus tendinitis musculi peronei longi ossis cuboidei di dalam saluran fibrosa yang berjalan dari sisi lateralis di belakang tuberositas ossis metatarsalis quinti miring kea rah pinggir medialis kaki. Di dalam saluran ini pada telapak kaki selubung synovial lain menutupi tendo. Oleh karena cara jalan tendo tersebut hingga fungsinya mirip dengan tali haluan (kummer) dan menyangga arcus transversalis pedis. Tendo ini menekan pinggir medialis kaki dan bersama-sama dengan m.peroneus brevis, merupakan pronator yang paling kuat. Otot ini di innervasi oleh N.peroneus (fibularis) superficialis (L5-S1). Fungsi untuk pronasi (abduksi dan eversi) dan plantar fleksi pedis.
6) M. peroneus brevis
Berasal dari facies lateralis fibula. Tendo otot ini bersama-sama dengan tendo m. peroneus longus berjalan dalam selubung synovial yang sama pada sulcul tendinis musculi peronei longi, dibawah retinaculum musculorum superius. Pada facies lateralis calcanei, tendo otot ini terfiksasi bagian proksimalisnya yaitu di atas trochlea peronealis calcanei oleh retinaculum musculorum perineum inferius di mana terdapat evaganasi selubung synovial bersama yang membungkus tendon. Tendon ini melekat pada tuberositas ossis metatarlis quinti. Otot ini bekerja seperti m.peroneus longus. Otot ini innervasi oleh N.Peroneus (fibularis) superficialis L5-S1. Fungsinya untuk pronasi (abduksi dan eversi) dan plantar fleksi pedis.
C. Tendon
Pada daerah dorsum pedis selubung synovial terdapat tendom musculus tibialis anterior, ekstensor hallucis longus dan ekstensor digitorum lobgus. Tendon-tendon dan selubung tendon pada daerah ini terkait pada tempatnya oleh retinaculum musculorum ekstensor inferior. Pada sisi lateral os tarsal di daerah trochlea peroneal os calcaneus terdapat selubung tendon peroneal bersama untuk musculi peronei. Tendon musculus peroneus longus meninggalkan selubung tendon synovial dan melanjutkan diri menyilang di daerah plantaris di dalam selubungnya sendiri. Selubung tendon bersama untuk musculi peronei tefiksasi pada tempatnya oleh retinaculum musculus peroneus superior dan retinaculum musculus peroneus inferior. Tendon-tendon otot-otot fleksor terletak pada sisi medial di belakang malleolus medial. Selubung-selubung tendonnya berjalan di bawah retinaculum musculus fleksor pedis (ligamentum lacinatum) yang terdiri dari lapisan superficial, memperkuat fascia cruris dan lapiasan profunda. Dibawah lapisan ini lewat tiga tendon masing-masing terbungkus oleh selubung sinovialnya sendiri diantaranya musculus tibialis posterior, fleksor digitorum longus dan fleksor hallucis longus.
Pada bagian plantaris terdapat lima selubung tendon sesuai dengan jari masing-masing. Selubung ini tidak berhubungan satu dengan yang lain dan diperkuat oleh selunbung fibrosa yang masing-masing terdiri dari berkas-berkas seranut sirkular dan terletak pada daerah sendi. Pars cruciform diantara sendi-sendi dan persilangan kumpulan serabut-serabut jaringan penyambung. Pada bagian rongga tengah facies plantaris tidak ditemui selubung tendon.
D. Ligament
Ligament pada ankle joint dapat dibagi dalam beberapa bagian yaitu ligament talonaviculare, ligament talocalcaneum lateral, ligament talocalcaneum medial dan ligament talocalcaneum posterior, ligament tarsi dorsal termasuk ligament bifurcatum dengan serabut ligament calcaneonavicular dancalcaneocuboid, ligament intercuneiform dorsal, ligament cuboidonaviculare dorsal, ligament cuneonavicular dorsal dan ligament calcaneocuboid dorsal.
Ligament tarsi plantaria menghubungkan masing-masing ossa tarsi pada permukaan plantaris. Ligament tersebut meliputi ligament plantar longum yang berjalan dari tuberositas calcanei ke cuboid dan ossi metatarsal. Ligament calcaneinavicular plantar atau spring ligament sangat penting untuk stabilisai kaki. Pars medial ligament plantar longum, ligament calcanecuboideum plantar merupakan bagian yang sangat penting. Selain itu juga terdapat ligament cuneonavicular plantar, ligament cuboideonavicular plantar, ligament intercuneiform plantar, ligament cuneocuboid plantar dan ligamenta interossea yaitu ligament intercuneiform interossea. Pada ligament antara tarsal dan metatarsal terdapat ligament tarsometatarso dorsal, ligament tarsometatarso plantar dan ligament cuneometatarso dorsal, ligament tarsometatarso plantar dan ligament cuneometatarsal interossea. Diantara ossa metatarsalia terdapat ligament metatarsal interossea dorsal dan plantar yang terletak pada basis metatarsal.
E. Arthrokinematik dan Osteokinematik 1) Talocrurale joint (Ankle Joint)
Sendi ini dibentuk oleh cruris (tibia dan fibula) dan os. Talus, permukaan sendi talus yang berbentuk silinder, yang juga disebut gulungan talus. Ankle fork terdiri dari ujung-ujung distal tibia dan fibula, yang dijaga sehingga tetap bersatu oleh dua ligamentum yang kuat, yaitu ligamentum tibiafibulare anterior dan posterior. Talocrurale joint secara fungsional dapat dianggap sebagai hinge joint.
Gerakan-gerakan yang memungkinkan adalah fleksi dorsal dan fleksi plantar. Tiga ligamentum yang kuat yang secara bersamaan membentuk huruf T berjalan dari malleolus lateralis adalah ligamentum talo fibulare.
Demikian pula terdapat ligamentum pada sisi medial yang berjalan dari malleolus medialis adalah ligamentum tibiotalar anterior, posterior, ligamentum tibiocalcaneale dan ligamentum tibionaviculare yang membentuk satu kesatuan yangdisebut ligamentum deltoideum. Bila kaki dalam posisi sudut 90° (posisi netral), maka besar fleksi plantar kira-kira 90°. Kira-kira separuh dari fleksi plantar (45°) terjadi di dalam talocrurale joint, fleksi dorsal sebesar 20°. Gerakan fleksi plantar ditahan oleh ligamentum – ligamentum yang berjalan dari malleoli bagian depan ke punggung kaki, yaitu ligamentum talo fibulare anterior, ligamentum tibiotalar anterior dan ligamentum posterior tetapi terutama oleh tendon Achilles.
Osteokinematik berupa gerak plantar fleksi dengan lingkup gerak sendi antara 40-50° dengan hard end feel, sedamhkan gerak dorsal fleksi ROM
antara 20-30° dengan elastic end feel. Gerakan plantar fleksi ditahan oleh ligamentum-ligamentum yang berjalan dari malleolus bagian depan kepunggung kaki, yaitu ligamentum tallofibular anterior, ligamentum tibiotalar anterior dan ligamentum posterior.
Arthrokinematik gerakan traksi terhadap talus ke arah distal, dan tranlasi untuk gerakan dorsal flexion kea rah posterior dan untuk plantar flexion kea rah anterior.
2) Talocalcanel Joint (Sub Talar Joint)
Talocalcanel joint merupakan sendi yang terletak antara talus dan calcaneus. Gerakan yang terjadi adalah gerak varus dan gerak valgus. Semangkin besar posisi kaki dalam fleksi plantar, semangkin besar kemiringan varusnya. Osteokinematik gerakan yang terjadi abduksi (Valgus) dan adduksi dengan ROM keduanya hard end feel. Arthrokinematik gerakan traction calcaneus kea rah distal terhadap os talus.
3) Intertarsal joint
Intertarsal joint merupakan non axial joint yang bersendi antara tulang tarsal dan hanya menghasilkan gerakan slide. Intertarsal joint atas 5 sendi yaitu:
a) Talocalcaneo navicular joint: memiliki cekungan permukaan sendi yang kompleks, termasuk jenis plane joint. Diperkuat oleh ligament plantar calcaneonavicular
b) Calcaneocuboid joint: merupakan plan joint(sendi datar). Bersama talonavicular membentuk tranvers tarsal joint. Diperkuat oleh
ligament spring, ligament dorsa navicular, ligament bifurcatum, ligament calcaneocuboid, ligament plantar calcaneocuboid
c) Caneo navicular joint: navicular bersendi dengan cuniforme I,II,III yang berbentuk cancave. Cuniforme bagian plantar berukuran lebih kecil sehingga bersama cuboid membentuk arcus transverse. Gerak utama plantar dan dorsal fleksi. Saat plantar fleksi terjadi gerak luncur cuneiform eke plantar.
d) Cuboideonavicular joint: cuniforme III dan merupakan sendi utamanya, berupa plane joint. Gerak yang terjadi adalah inverse dan eversi. Saat inverse cuboid translasi ke plantar medial terhadap cuneiforme III.
e) Intercuneiform joint: bersama navicular membentuk arcus transverse, saat gerakan pronasi-supinasi atau inverse-eversi terjadi pengurangan dan penambahan pada arcus. Arthrokinematiknya berupa translasi antar tulang tarsal.
4) Tarso Metatarsal joint
Cuneiforms I – II – III bersendi dengan metatarsal I – II – III, cuboid bersendi dengan metatarsal IV – V. Metatarsal II ke proximal sehingga bersendi juga dengan cuneiforme I & III, sehingga sendi ini paling stabil dan geraknya sangat kecil. Gerakan pada sendi ini plantar dan dorsal fleksi. Osteokinematik pada plantar flexion terjadi peningkatan arcus. MT I gerak roll slide ke plantar lateral MT III – IV – V roll slide ke ventromedial. Arthrokonematic traksi gerak MT ke distal (translasi searah).
5) Metatarsophalangeal joint
Distal metatarsal convex dan basis phalageal concave membentuk sendi ovoid-hinge. Dengan gerakan flexion-extension dan abduction-adduction. MLPP = Extension 11°, CPP= Full Extension. Gerak translation searah gerak angular, traction selalu kearah distal searah axis longitudinal phalang dan dengan elastic endfeel.
6) Proksimal dan distal interphalangeal joint
Caput proximal phalang convex dan basis distal phalangeal concave membentuk sendi hinge. Gerak fleksi-extension. MLPP = Flexion 10°, CPP = Full Extension. Gerak translation searah gerak angular, traction selalu searah axis longitudinal phalang.
2.4 Lari (Running)
Sebelum membahas tentang analisa gerak pada saat berlari, akan membahas tentang analisa pada gerak berjalan dahulu, karena lari merupakan gerakan yang hamper sama dengan berjalan.
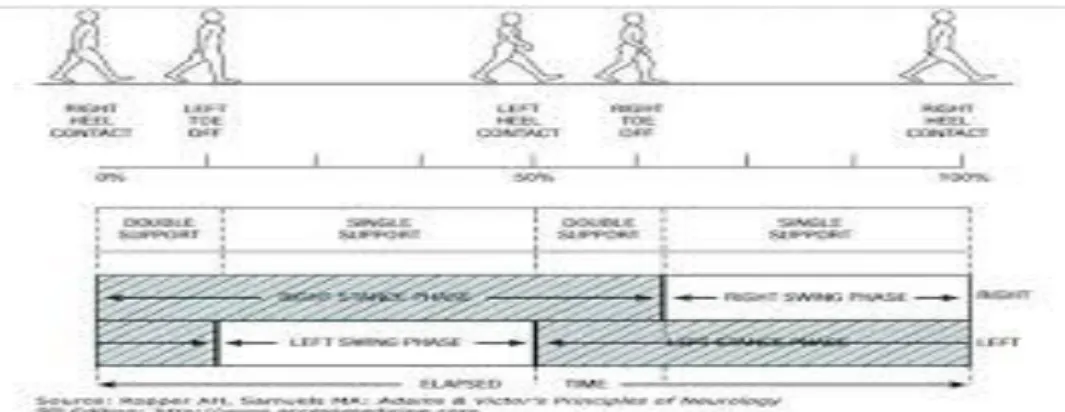
Pada gerakan berjalan ada beberapa tahap yang harus dilalui, yang disebut dalam satu siklus. Dalam satu siklus berjalan terdiri dari fase melayang (swing phase) yang terdiri dari akselerasi, mid swing dan deselerasi dan fase menapak (support phase yang terdiri dari heel strike, mid stance,dan toe off) (David, 2002).
Satu siklus adalah dari heel strike kaki kanan sampai hell strike kaki kiri. Jadi siklus dibentuk oleh dua langkah. Pada aktivitas berjalan, fase menapak adalah 60% dan fase melayang adalah 40%.
Pada gerakan berlari pada prinsipnya sirkulasi berlari sama dengan siklus berjalan, akan tetapi pada berlari fase menapak adalah 40% dan fase melayang 60%. Sedangkan kecepatan berlari ditentukan oleh panjang langkah dan frequensi langkah (jumlah langkah yang diambil dalam setiap unit waktu).
Gambar 2.6 Fase Berjalan
Sumber: http://www.lookfor diagnosis.com
Pada dasarnya fase berjalan dan fase berlari memiliki analisa kinesiology yang sama, hanya pada saat berlari, fleksi hip lebih besar daripada berjalan. Juga pada saat berlari lutut dalam posisi fleksi yang lebih besar dari pada berjalan dan tidak pernah ekstensi penuh. Dan dalam pergelangan kaki saat berlari, waktu toe off posisi kearah plantar fleksi lebih besar dari pada berjalan. Pada aktivitas berlari pada fase melayang maka hamper semua otot berkontraksi untuk melakukan gerakan tersebut (David, 2002).
Lari merupakan gerak darat yang memungkinkan manusia dan hewan lain untuk bergerak cepat dengan berjalan kaki. Ini didefinisikan dalam istilah olahraga sebagai gaya berjalan dimana titik-titik biasa selama siklus berjalan dengan kaki berpijak di tanah. Hal ini berbeda dengan berjalan, dimana satu kaki selelu bersentuhan dengan tanah, dan satu kaki digunakan sebagian besar lurus dan pusat gravitasi (Biwer,2003). Lalu kaki kiri menapak dan sebelum kaki kanan
menapak, kaki kiri telah melakukan gerakan mendorong juga. Demikian dilakukan terus menerus secara continue. Bila pada saat berjalan hanya terdapat 2 kondisi melangkah dan menapak. Maka pada saat berlari terdapat 3 kondisi, yaitu melangkah, melayang dan menapak (David, 2002).
2.5 Latihan Eksentrik
Latihan eksentrik merupakan latihan yang melibatkan prestreching otot, sehingga mengaktifkan Stretch shortening cycle. Prinsip Stretch shorten cycle dapat digunakan untuk meningkatkan latihan dalam olahraga dimana latihan ini membutuhkan kekuatan otot secara maksimal dalam jumlah waktu yang minimum dengan menggunakan propioseptor dan elastis otot untuk menghasilkan kekuatan yang maksimal. Pada otot cendrung memiliki sifat elastis ketika terulur dengan cepat seperti karet gelang. Artinya semangkin cepat otot berkontraksi secara eksentrik, maka semangkin besar pula stretch reflex yang dihasilkan. Kontraksi eksentrik-konsentrik ini bekerja secara berpasangan sebagai perangsang propioseptif untuk memfasilitasi peningkatan muscle reqruitment pada waktu yang minimum atau pada waktu yang singkat. Sehingga peningkatan dalam system neuromuscular memungkinkan seseorang atau atlit untuk mengontrol kontraksi ototnya menjadi lebih baik (William, 2007).
Stretch shorten cycle (SSC) memiliki kemampuan penyimpanan energi dari Series Elastic Componen (SEC) dan stimulasi reflex peregangan untuk memfasilitasi peningkatan yang maksimal dalam perekrutan otot di atas jumlah minimal waktu.SSC melibatkan tiga tahap yaitu Serial Elastic Componet (SEC), Contractil Component (CC), Pararel Elastic Component (PEC). Sementara tabel
menggambarkan peristiwa individu SSC mekanik dan neurologis setiap tahap, penting untuk mengingat bahwa semua peristiwa yang tercantum tidak selalu terjadi dalam fase tertentu, yaitu beberapa peristiwa dapat bertahan lebih lama atau mungkin membutuhkan waktu lebih sedikit dari yang diperbolehkan dalam tahap tertentu, tahap 1 adalah fase eksentrik, yang melibatkan preloading kelompok otot agonis.
Selama fase ini, SEC sebagai elastic energy, dan spindle otot distimulasi. Sebagai otot spindle yang membentang, mereka mengirim sinyal ke akar ventral medulla spimasil melalui serat aferen saraf tipe Ia. Tahap 2 adalah waktu antara fase eksentrik dan kosentrik dan disebut fase amortisasi atau transisi. Ini adalah waktu dari akhir fase eksentrik dengan dimulainya aksi otot konsentris (Thomas, 2005).
Faktor yang mempengaruhi stretch shorten cycle adalah daya recoil dan stretch reflex. Daya recoil merupakan suatu kemampuan untuk kembali ke posisi awal setelah melakukan penguluran atau pengembangan. Dimana pada latihan eksentrik stretch reflex yang merangsang dan mengaktifkan peregangan monosynaptic.
Pada kontraksi eksentrik aktivitas kontraktil melawan peregangan hal ini dilihat ketika otot quadriceps dan gastroc menurunkan beban selama tindakan ini serat-serat otot memanjang tetapi tetap berkontraksi melawan peregangan, ketegangan ini menahan berat badan. Sehingga selama kontraksi eksentrik kekuatan otot yang dihasilkan dari otot lebih tinggi bila dibandingkan dengan kontraksi isometrik dan kontraksi konsentrik. Peningkatan kekuatan otot dan tenaga seperti halnya hipertropi. Hipertropi ini (setara dengan peningkatan area
cross-sectional), secara luas dipercaya sebagai penyebab utama perubahan protein otot skelet dari serabut otot. Namun, karena respon yang bersamaan pada aktifitas fibroblastik selama latihan eksentrik, hipertropi yang ada mungkin disebabkan oleh peningkatan ketebalan atau densitas fascia dan komponen elastik seri (SEC) dalam otot. Oleh karena itu, latihan tipe eksentrik mungkin tidak menyebakan efek pembesaran ukuran otot (William, 2007).
Pada latihan eksentrik terjadi ketegangan yang dihasilkan dari jembatan silang meningkat sehingga komponen elastiknya bertambah kuat ini disebabkan karena memanjangnya leher dari molekul myosin (Hans, 2014)
Pada kontraksi eksentrik pembuluh darah dalam keadaan yang bebas sehingga memungkinkan nutrisi dan suplai oksigen jadi tercukupi. Dalam latihan eksentrik ada tiga faktor penting yang saling berhubungan secara sirkuler yaitu gaya otot (muscle force), kecepatan gerak (speed of movement), dan derajat penguluran muskulotendinogen (degree of musculotendinous stretch). Pada latihan eksentrik efek prestretch ini sering digunakan dalam aktivitas fungsional (Hans, 2014)
Latihan eksentrik memerlukan oksigen lebih sedikit dibandingkan dengan aktifitas konsentrik. Pengambilan oksigen perunit dari aktifitas otot secara konsisten menunjukkan penurunan sebagai hasil dari latihan dengan tipe eksentrik. Davies dan Barnes menyimpulkan bahwa efek latihan disebabkan oleh adaptasi sistem otot dan bukan merupakan akibat dari perubahan sistem pernapasan. Selama steady stage pengambilan oksigen untuk kerja selama 4 menit, intensitas tinggi dari kinerja hampir setara dengan intensitas rendah pada konsentrik (Hans, 2014).
Tidak ditemukannya konsentrasi laktat dalam darah pada aktifitas eksentrik menunjukkan bahwa aliran darah tetap adekuat selama latihan eksentrik yang melelahkan. Karena pengaruh mekanik selama latihan eksentrik yang benar-benar menyebabkan pekerjaan dikerjakan di dalam otot, sebagai lawannya oleh otot, perpindahan energi bertanggung jawab pada suatu peningkatan suhu tubuh. Suhu internal ini selama latihan eksentrik tetap lebih rendah dibandingkan dengan latihan konsentrik hal ini mungkin disebabkan karena kebutuhan darah otot yang lebih rendah. Dengan menggunakan mode isotonik, peningkatan kekuatan eksentrik dilihat dari meningkatnya kecepatan gerakan.
Konsep utama yang mempengaruhi pusat kontrol mekanisme neuromuskular terpisah menjadi tiga, tetapi mungkin saling terkait, yaitu:
a. Perubahan aktifitas mekanoreseptor (reflex tendon).
b. Perubahan pada myoelektrik dan neural aktivitas dan perekrutan otot. c. Perubahan respon viskoelstik.
Pada eksentrik, sistem saraf (CNS) mengatur mekanisme proteksi selama beban maksimum yang mencegah ruptur otot komplit. Hubungan tekanan-kecepatan akan menampilkan sebuah kestabilan yang diikuti dengan hilangnya kekuatan secara tiba-tiba. Peran penting dari latihan eksentrik pada sistem neuromuskular yang didukung ada dua mekanisme yaitu:
a. Penumpukan tenaga putaran adalah bukti bahwa hanya selama beban eksentrik berlangsung disfungsi biomekanik dan nyeri dapat diabaikan.
b. Respon yang sukses pada latihan eksentrik yang hanya dalam dua sampai empat minggu terkait dengan waktu adaptasi neuromuskular sebagai kebalikan dari hipertropi dan perubahan morfologis otot.
Sebagai faktor terakhir pada kontrol neuromuskular, kecepatan mungkin dapat diubah oleh perubahan level ambang rangsang GTO (gongli tendon organ). Kekuatan viskoelastik diartikan sebagai level yang dihasilkan dari ketegangan otot per unit beban stretch yang meningkat selama respon eksentrik otot. Formasi crossbride akan meningkatkan kekuatan otot, sementara elongasi akan cendrung meningkatkan tegangan dari sebuah otot yang teraktifasi dengan kuat (William, 2007).
2.6 Latihan Plyometric
Latihan ini bertujuan untuk meningkatkan reaksi rangsangan syaraf terhadap peningkatan kemampuan reaktif dan sistem neuromuskular. Latihan plyometric ini melibatkan prestretching otot, sehingga mengaktifkan stretch-shorthening cycle. Adaptasi plyometric terhadap prinsip stretch-stretch-shorthening dapat digunakan untuk meningkatkan latihan dalam olahraga. Pada otot cenderung memiliki sifat elastis ketika terulur dengan cepat seperti karet gelang, artinya semangkin cepat otot berkontraksi secara eksentrik, maka semangkin besar pula stretch reflex yang dihasilkan. Kontraksi eksentrik-kosentrik ini bekerja secara berpasangan sebagai perangsang propioseptif untuk meningkatkan muscle reqruitment pada waktu minimum atau pada waktu yang singkat. Sehingga peningkatan sistem neuromuskular memungkinkan seseorang atau atlit mengontrol kontraksi ototnya menjadi lebih baik (William, 2007).
Sewaktu terjadi stretch (eksentrik) merupakan kontraksi dimana untuk mempersiapkan jaringan kontaktil untuk dapat melakukan kontraksi secara konsentrik (shorthening). Hal ini merangsang dan mengaktifkan terjadinya
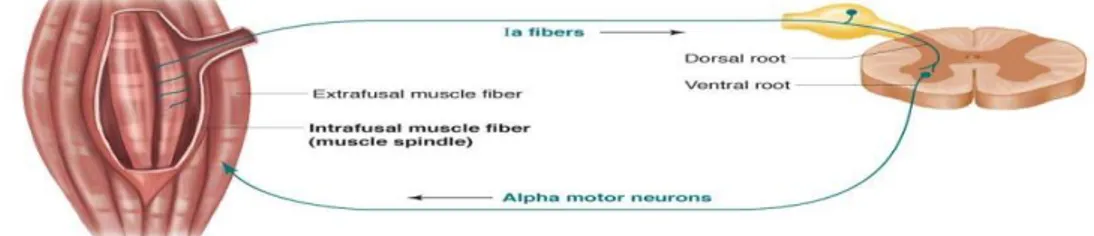
peregangan monosynaptic. Muscle spindle, panjang otot dan kecepatan peregangan mengirimkan informasi ke sistem saraf pusat (SSP) yang kemudian yang kemudian rangsangan ini dikirim ke otot untuk dapat memfasilitasi kontaksi otot secara konsentrik (shorthening reflex) dari kontraksi eksentrik (stretch reflex). Fungsi utama dari musle spindle sebagai reseptor regangan. Stretch refleks memerlukan respon dari sistem sensomotorik yang dibawa langsung dari saraf sensorik afferent pada muscle spindle ke sumsum tulang belakang untuk melakukang kontak dengan saraf motorik untuk dapat merespon otot untuk berkontraksi konsektrik dengan cepat (Thomas, 2005).
Gambar 2.7: Passive Stretch reflex.
Sumber: Fitness Weight Training, Thomas R. 2005
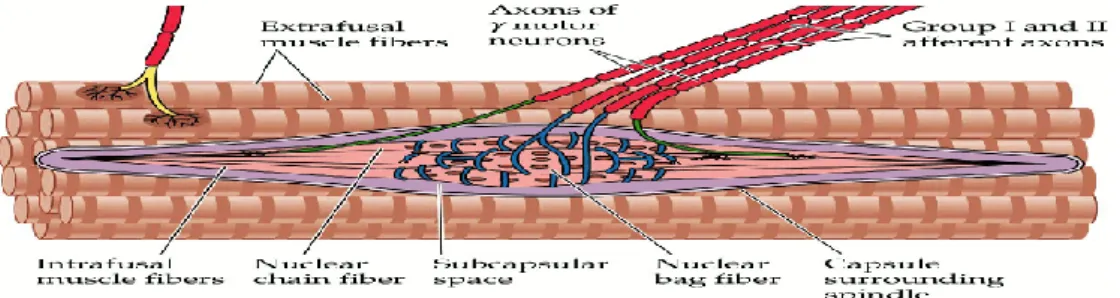
Muscle spindle (perut otot), golgi tendon organ (GTO) dan persendian merupakan komponen utama pada propiosepsi. Reseptor stimulus ini dapat digunakan akibat dari fasilitasi, inhibisi, dan modulasi dari otot agonis dan antagonis. Muscle spindle dan golgi tendon organ (GTO) sebagai penyedia dasar propioseptif untuk latihan plyometric.
Gambar 2.8 : Muscle Spindle
Sumber: Theraupeutic Exercise for Physical Therapy Asistants, 2007 Golgi tendon organ (GTO) sangat sensitif dengan tegangan yang berada pada persimpangan antara tendon dengan otot pada bagian distal dan proksimal. Hal ini disusun dengan serat otot ekstrafursal dan maka dari itu menjadi aktif dengan peregangan. Tidak sama dengan GTO memiliki penghambat pengaruh pada otot. Selama terjadi aktivitas dimana rangsangan dikirim ke spinal cord. Disebabkan inhibisi oleh α motor neuron yang mengkontraksikan otot dan disinergiskan serta dibatasi oleh kekuatan yang dihasilkan. Ini berdasarkan prinsip pada GTO yaitu mekanisme protektif akibat kontraksi ataupun terulur yang berlebihan. Karena GTO setidaknya menggunakan satu interneuron dalam siklus sinaptik, hambatan yang terjadi memerlukan lebih dari sekedar rangsangan monosinaptik dari tipe saraf Ia (Bryant, 2002).
Power akan meningkat ketika kekuatan otot dan proses stretch-shorthening cycle berlangsung dengan cepat sehingga menghasilkan agility yang baik pada tubuh. Bentuk latihan yang diberikan sesuai dengan kebutuhan yang diperlukan dalam peningkatan agility, yaitu box jump, knee tuck jump, dan bouding.
2.7 Mekanisme Latihan Eksentric M.Gastrocnemius dan Latihan Plyometric pada peningkatan Agility
Otot gastroknemius atau juga dikenal sebagai leg triceps ini memiliki dua kepala. Kedua kepala gastrocnemius berorigo pada condylus femoralis. Otot gastrocnemius berinsertio pada calcaneus dan membentuk tendon Achilles. Dari belakang, kepala lateral yang terletak lateral tungkai. Kepala medial terletak pada bagian medial tungkai. Kedua kepala ini bergabung untuk membentuk muscle belly. Serat otot gastrocnemius sebagian besar fast-twitch fibers. Fast-twitch fibers dapat aktif berkontraksi dan dalam melakukan gerakan eksplosif dalam waktu yang singkat, sehingga gastrocnemius yang paling aktif selama gerakan-gerakan seperti melompat atau berlari. Tendon dari gastrocnemius adalah tendon Achilles. Gastronemius melewati dua sendi yakni lutut dan pergelangan kaki. Sehingga otot ini berkoordinasi dengan otot-otot lain untuk bergerak pada masing-masing sendi.
Latihan eksentrik merupakan latihan yang melibatkan prestreching otot, sehingga mengaktifkan strectch shortening cycle. Prinsip stretch shorten cycle dapat digunakan untuk meningkatkan latihan dalam olahraga dimana latihan ini membutuhkan kekuatan otot secara maksimal dalam jumlah waktu yang minimum dengan menggunakan propioseptor dan elastis otot untuk menghasilkan kekuatan yang maksimal. Pada otot cendrung memiliki sifat elastis ketika terulur dengan cepat seperti karet gelang, artinya semangkin cepat otot berkontraksi secara eksentrik, maka semangkin besar pula stretch reflex yang dihasilkan. Kontraksi eksentrik-konsentrik ini bekerja secra berpasangan sebagai perangsang propioseftif untuk memfasilitasi peningkatan muscle reqruitment pada waktu yang minimum atau pada waktu yang singkat. Sehingga peningkatan dalam sistem neuromuscular memungkinkan seseorang atau atlit untuk mengontrol kontraksi ototnya menjadi lebih baik.
Latihan plyometric ialah latihan yang dirancang untuk meningkatkan kekuatan otot, kecepatan, dan fleksibilitas. Meningkatnya kekuatan otot, kecepatan, dan fleksibilitas dikarenakan muscletendinous unit teregang, dalam tindakan eksentrik otot, Siries Elastic Component (SEC) bertindak seperti pegas dan terus memanjang, ketika muscletendinous teregang disaat bersamaan energi elastis tersimpan. Jika otot mulai konsentrik tindakan segera untuk berkontribusi untuk memproduksi kekuatan secara total dengan cara alami. Apabila muscletendinous teregang secara terus menerus akan mengakibatkan meningkatnya kekuatan otot, dengan meningkatnya kekuatan otot alkan mempengaruhi kecepatan dan fleksibilitas, selain itu model neurofisiologis melibatkan potentiation (merubah karekteristik tekanan, peningkatan kecepatan komponen jaringan kontraktil otot, akibat dari penguluran konsentrik otot oleh karena stretch reflek). Stretch reflek adalah respon voluntary tubuh terhadap stimulasi eksternal dari peregangan otot. Komponen utama reflex dari latihan ini adalah aktivitas muscle spindle. Muscle spindle adalah organ propioseptive yang sensitif berdasarkan tingkat dan besarnya stretch. Ketika terjadi quick stretch aktivitas muscular terjadi akan mengakibatkan terjadinya peningkatan reflex. Selama latihan
plyometric, muscle spindle terstimulasi oleh rapid stretch, sehingga terjadi reflexive muscle. Respon reflex ini berpotensi atau meningkatkan aktivitasdari otot agonis.
Karena itu peningkatan beban dapat meningkatkan prokduktivitas otot.
Kemampuan otot gastrocnemius berkontraksi dengan cepat dalam menggerakan plantar fleksi pada pergelangan kaki akan memberikan daya ledak serta power yang maksimal sehingga kemampuan agility akan meningkat.