PENGUKURAN KOEFISIEN REDAMAN MAGNETIK PADA MAGNET NEODYMIUM (NdFeB) YANG BERGERAK DI DALAM PIPA
ALUMINIUM MENGGUNAKAN ANALISIS VIDEO
SKRIPSI
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Pendidikan
Program Studi Pendidikan Fisika
Oleh:
Yosef Emanuel Ragu
NIM: 161424035
PROGRAM STUDI PENDIDIKAN FISIKA
JURUSAN PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM
FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
i
PENGUKURAN KOEFISIEN REDAMAN MAGNETIK PADA MAGNET NEODYMIUM (NdFeB) YANG BERGERAK DI DALAM PIPA
ALUMINIUM MENGGUNAKAN ANALISIS VIDEO
SKRIPSI
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Pendidikan
Program Studi Pendidikan Fisika
Oleh:
Yosef Emanuel Ragu
NIM: 161424035
PROGRAM STUDI PENDIDIKAN FISIKA
JURUSAN PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN ALAM
FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
iv
HALAMAN PERSEMBAHAN
Skripsi ini kupersembahkan untuk:
Kedua orang tua tercinta bapak Donatus Lau dan ibu Genofeva Jedia
Saudara dan saudari saya Karolus Boromeus Jelau, Maria Theresia Mawarni, Yohanes Yunior Erikson, dan Paulus Sandrianus Jelau
Keluarga besar prodi pendidikan fisika universitas sanata dharma
“Hanya orang-orang yang lemah yang selalu berkata ‘'Sudahlah, mungkin ini sudah menjadi takdir saya”, ketahuilah sahabat takdir itu bisa diubah dengan doa dan usaha”
vii
ABSTRAK
PENGUKURAN KOEFISIEN REDAMAN MAGNETIK PADA MAGNET NEODYMIUM (NdFeB) YANG BERGERAK DI DALAM PIPA
ALUMINIUM MENGGUNAKAN ANALISIS VIDEO
Yosef Emanuel Ragu Universitas Sanata Dharma
Yogyakarta 2020
Telah dilakukan penelitian mengenai redaman magnetik pada magnet Neodymium yang bergerak di dalam pipa aluminium. Magnet yang bergerak di dalam pipa aluminium mengalami perubahan kecepatan hingga akhirnya bergerak dengan kecepatan konstan akibat adanya gaya redaman. Untuk mendapatkan nilai koefisien redaman, beban yang digantung pada salah satu ujung tali penggantung direkam menggunakan kamera video dan dianalisis menggunakan software pengolah video Logger Pro sehingga diperoleh data posisi fungsi waktu. Data tersebut difit dengan persamaan gerak magnet teredam sehingga diperoleh nilai kecepatan terminal. Selanjutnya nilai kecepatan terminal digunakan untuk mendapatkan nilai koefisien redaman magnetik. Pipa aluminium yang digunakan memiliki diameter dalam yang berbeda-beda dengan panjang dan ketebalan yang sama. Hasil penelitian menunjukkan bahwa terdapat hubungan yang berbanding terbalik antara diameter dalam pipa aluminium terhadap nilai koefisien redaman magnetik. Semakin besar diameter dalam pipa maka nilai koefisien redaman magnetik yang dihasilkan semakin kecil.
Kata kunci: pipa aluminium, magnet Neodymium, koefisien redaman magnetik, Logger Pro.
viii ABSTRACT
THE MEASUREMENT OF MAGNETIC DAMPING COEFICIENT IN MOVING NEODYMIUM MAGNET (NdFeB) IN THE ALUMINUM PIPES
BY USING VIDEO ANALYSIS
Yosef Emanuel Ragu Universitas Sanata Dharma
Yogyakarta 2020
A research about magnetic damping in Neodymium magnets that movement in aluminum pipes had been done. Magnets that move in aluminum pipes had speed changes until finally move at a constant speed because of the damping force. To get the damping coefficient, a weight hanging from one end of a hanging rope movement was recorded by using video recording and was analyzed by using software Logger Pro to get position versus time data. Later, data was fitted by using equation of damped magnet movement to get terminal velocity. Afterward terminal velocity was used to obtain value of magnetic damping coeficient. The aluminum pipe used has different internal diameters with same length and thickness. Finally, this study found an invers correlation between magnetic damping coefficient with internal diameters. The bigger the internal diameter, the smaller the magnetic damping coefficient value would be.
Keywords: aluminum pipe, Neodymium magnets, magnetic damping coeficient, Logger Pro.
ix
KATA PENGANTAR
Puji dan syukur kepada Tuhan yang Maha Esa atas rahmat dan karunia-Nya yang begitu besar penulis dapat menyelesaikan penelitian dan penulisan skripsi dengan judul “PENGUKURAN KOEFISIEN REDAMAN MAGNETIK PADA
MAGNET NEODYMIUM (NdFeB) YANG BERGERAK DI DALAM PIPA ALUMINIUM MENGGUNAKAN ANALISIS VIDEO”. Penulisan skripsi ini
merupakan salah satu syarat guna memperoleh gelar sarjana pendidikan untuk Program Studi Pendidikan Fisika Fakultas Keguruan dan Ilmu Pendidikan Universitas Sanata Dharma.
Penelitian dan penulisan skripsi ini tidak akan terlaksana dengan baik tanpa bantuan dan kerjasama dari beberapa pihak yang dengan caranya masing-masing telah membantu penulis dalam penelitian dan penulisan skripsi ini. Oleh karena itu pada kesempatan ini dengan penuh rasa syukur dengan segala kerendahan hati dan penuh rasa hormat penulis mengucapkan terimakasih yang sebesar-besarnya kepada :
1. Kedua orang tua tercinta Donatus Lau dan Ibu Genofeva Jedia yang dengan penuh cinta dan kasih selalu mendukung dan menyemangati serta memenuhi kebutuhan penulis dalam penelitian dan penulisan skripsi ini. 2. Kakak charli jelau adik Tesa mawarni, jhon erikson dan andri jelau yang
dengan caranya masing-masing mendukung dan menyemangati penulis dalam penelitian dan penulisan skripsi ini.
3. Bapak Dr. Ign. Edi Santosa, M.S. selaku ketua Program Studi Pendidikan Fisika Universitas Sanata Dharma.
4. Bapak Albertus Hariwangsa Panuluh, M. Sc. selaku dosen pembimbing yang dengan penuh kesabaran membimbing penulis dalam penelitian dan penulisan skripsi ini.
5. Seluruh dosen Program Studi Pendidikan Fisika Universitas Sanata Dharma yang telah membimbing dan mengajari penulis selama kuliah kurang lebih empat tahun.
x
6. Bapak Petrus Ngadiono selaku petugas laboratorium Pendidikan Fisika Universitas Sanata Dharma yang telah membantu dalam menyediakan alat dan bahan selama pengambilan data dalam proses penelitian berlangsung. 7. Teman-teman mahasisiwa Pendidikan Fisika Angkatan 2016.
8. Semua pihak yang dengan caranya masing-masing baik secara langsung maupun tidak langsung telah membantu dalam penelitian dan penulisan skripsi ini .
Semoga isi dari skripsi ini dapat bermanfaat bagi para pembaca atau pun pihak-pihak yang memerlukannya. Seperti dalam pepatah yang mengatakan “tidak ada gading yang tidak retak” penulis menyadari masih ada beberapa kekurangan serta keterbatasan dalam penulisan skripsi ini, untuk itu kritik dan saran yang bersifat membangun sangat penulis perlukan untuk perbaikan dan penyempurnaan dalam penelitian selanjutnya.
Yogyakarta, 30 Juli 2020 Penulis
xi
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN PEMBIMBING ... ii
HALAMAN PENGESAHAN ... iii
HALAMAN PERSEMBAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vi
ABSTRAK ... vii
ABSTRACT ... viii
KATA PENGANTAR ... ix
DAFTAR ISI ... xi
DAFTAR TABEL ... xiii
DAFTAR GAMBAR ... xiv
DAFTAR LAMPIRAN ... xvi
BAB 1PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 4 1.3 Batasan Masalah ... 4 1.4 Tujuan Penelitian ... 4 1.5 Manfaat Penelitian ... 5 1.6 Sistematika Penulisan ... 5
BAB 2 LANDASAN TEORI ... 7
2.1 Medan Magnet ... 7
xii
2.3 Gaya Lorentz ... 9
2.4 Fluks Magnet ... 11
2.5 Gerak Magnet ... 13
BAB 3METODOLOGI PENELITIAN... 18
3.1 Seting alat ... 18
3.2 Prosedur dan Pengambilan Data ... 20
3.3 Pengolahan Data ... 21
BAB 4HASIL PENELITIAN dan PEMBAHASAN ... 26
4.1 Hasil ... 26
4.2 Pembahasan ... 35
BAB 5KESIMPULAN dan SARAN ... 40
5.1 Kesimpulan ... 40
5.2 Saran ... 40
xiii
DAFTAR TABEL
Tabel 4.1 Hasil pengukuran massa magnet Neodymium menggunakan neraca Ohaus ... 26 Tabel 4.2 Hasil pengukuran diameter dan tinggi magnet Neodymium ... 27 Tabel 4.3 Hasil pengukuran diameter dalam berbagai pipa aluminium... 27 Tabel 4.4 Nilai kecepatan terminal untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan
tinggi (1,001 ± 0,001) × 10 − 2 m yang bergerak di dalam pipa aluminium dengan diameter dalam sebesar (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 10 gram ... 33 Tabel 4.5 Koefisien redaman magnetik untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan
tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3 meter dan (25,91 ± 0,02) × 10−3
meter dengan massa beban penggantung sebesar10 gram ... 34 Tabel 4.6 Koefisien redaman magnetik untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan
tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa
aluminium dengan diameter dalam sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3 meter dan (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 20 gram ... 35
xiv
DAFTAR GAMBAR
Gambar 2.1 Garis-garis medan magnet dari sebuah magnet ... 7
Gambar 2.2 Elemen arus I dl menghasilkan medan magnetik di titik P1 yang tegak lurus terhadap I dl maupun 𝒓 (sumber gambar: Tipler, 2001) ... 8
Gambar 2.3 Elemen arus untuk menghitung medan magnetik di pusat simpal arus melingkar (sumber gambar: Tipler, 2001). ... 8
Gambar 2.4 Potongan kawat yang panjangnya l sedang menyalurkan arus listrik I (sumber gambar: Tipler, 2001). ... 9
Gambar 2.5 Gaya magnetik pada sepotong kecil kawat dalam medan magnetik (sumber gambar: Tipler, 2001). ... 10
Gambar 2.6 Fluks magnetik (sumber gambar: Giancoli, 2014). ... 11
Gambar 2.7 (a) magnet dalam keadan diam; (b) magnet bergerak mendekati kumparan; (c) magnet bergerak menjauhi kumparan (sumber gambar: Giancoli, 2014). ... 12
Gambar 2.8 Proses terbentuknya arus induksi dan medan magnet induksi akibat magnet yang bergerak mendekati simpal (sumber gambar: Tipler, 2001)... 13
Gambar 2.9 Pesawat Atwood ... 14
Gambar 2.10 Gaya-gaya pada katrol (sumber gambar: Santosa dkk, 2017). ... 15
Gambar 2.11 Posisi sesaat magnet yang bergerak di dalam pipa aluminium ... 16
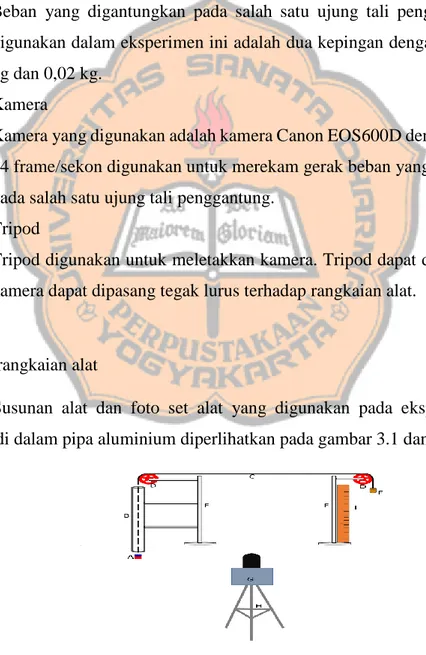
Gambar 3.1 Susunan alat yang digunakan pada eksperimen gerak magnet di dalam pipa aluminium. A: magnet Neodymium (NdFeB), B: pipa aluminium, C: tali penggantung, D: katrol, E: beban, F: statip, G: kamera, H: tripod, dan I: Penggaris. ... 19
Gambar 3.2. Foto set alat untuk eksperimen gerak magnet Neodymium di dalam pipa aluminium. ... 20
Gambar 3.3 Tampilan awal pada Logger Pro sebelum hasil rekaman video dimasukkan... 22
Gambar 3.4 Ikon video analysis untuk menganalisis video. ... 22
Gambar 3.5 Ikon set scale untuk menentukan ukuran sesungguhnya dan add point untuk mengambil data. ... 23
xv
Gambar 3.6 Pemberian garis set scale dan kotak isian scale ukuran panjang sesungguhnya ... 23 Gambar 3.7 Titik-titik yang membentuk grafik pada posisi horizontal (x) dan posisi vertikal (y). ... 24 Gambar 3.8 Ikon linear fit untuk memfit grafik posisi fungsi waktu untuk gerakan magnet dengan kecepatan konstan. ... 25 Gambar 3.9. Tampilan pada LoggerPro setelah meng-klik ikon linear fit. ... 25 Gambar 4.1 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan
tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di ruang bebas udara dengan massa beban penggantung 10 gram. ... 28 Gambar 4.2 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan
tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter (25,91 ± 0,02) × 10−3 meter dengan
massa beban penggantung 10 gram. ... 29 Gambar 4.3 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan
tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di ruang bebas udara
(warna biru) dan di dalam pipa aluminium dengan diameter (25,91 ± 0,02) × 10−3 meter (warna merah tua) dengan massa beban
penggantung 10 gram. ... 30 Gambar 4.4 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−3 m dan
tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa
aluminium dengan diameter (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung 10 gram. ... 32 Gambar 4.5 Nilai koefisien redaman magnetik pada variasi diameter dalam pipa aluminium untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ±
0,001) × 10−2 m dengan massa beban penggantung sebesar10 gram (warna biru) dan 20 gram (warna merah tua) ... 35
xvi
DAFTAR LAMPIRAN
LAMPIRAN 1 ... 42
1.1 Perhitungan massa, diameter dan tinggi magnet Neodymium (NdFeB) ... 42
1.2 Perhitungan diameter dalam pipa aluminium ... 44
LAMPIRAN 2 ... 47
2.1 Grafik Posisi Fungsi Waktu untuk magnet Neodymium yang bergerak di ruang bebas udara pada variasi massa beban penggantung ... 47
2.2 Grafik Posisi Fungsi Waktu untuk magnet Neodymium yang bergerak di dalam pipa aluminium pada variasi ketebalan pipa aluminium dengan massa beban penggantung 10 gram ... 48
2.3 Grafik Posisi Fungsi Waktu untuk magnet Neodymium yang bergerak di dalam pipa aluminium pada variasi pipa ketebalan pipa aluminium dengan massa beban penggantung 20 gram ... 50
LAMPIRAN 3 ... 53
3.1 Perhitungan kecepatan terminal rata-rata magnet Neodymium dengan massa beban penggantung 10 gram ... 53
3.2 Perhitungan kecepatan terminal rata-rata untuk magnet Neodymium dengan massa beban penggantung 20 gram ... 55
LAMPIRAN 4 ... 59
4.1 Pengukuran nilai koefisien redaman magnetik untuk magnet Neodymium yang bergerak di dalam pipa aluminium dengan dengan massa beban penggantung 10 gram ... 59
4.2 Pengukuran nilai koefisien redaman magnetik untuk magnet Neodymium yang bergerak di dalam pipa aluminium dengan dengan massa beban penggantung 20 gram ... 62
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Redaman magnetik merupakan salah satu contoh jenis redaman yang terjadi akibat adanya interaksi medan magnet (yaitu magnet) yang bergerak di sekitar konduktor listrik (atau sebaliknya). Interaksi antara magnet dan konduktor listrik yang bergerak satu terhadap yang lainnya ini menimbulkan perubahan fluks magnetik sehingga membangkitkan arus induksi atau yang dikenal dengan arus eddy. Selanjutnya arus eddy yang timbul menghasilkan fluks pelawan yang melawan perubahan fluks magnetik penyebabnya. Timbulnya fluks pelawan ini menghasilkan gaya redaman magnetik (Giancoli, 2014).
Redaman magnetik timbul sebagai konsekuensi dari hukum Lenz tentang induksi magnetik. Sejauh pengalaman yang dialami oleh penulis dimana penjelasan terkait materi hukum Lenz ini, guru dalam penyampaian materi cenderung hanya menggunakan metode ceramah. Metode ceramah ini cenderung membuat siswa merasa jenuh sehingga antusiasme siswa dalam mengikuti pembelajaran sangat rendah. Kurangnya eksperimen terkait materi hukum Lenz khususnya tentang induksi magnetik ini menjadi salah satu penyebab kurangnya antusiasme siswa dalam mengikuti pembelajaran.
Penerapan redaman magnetik salah satunya digunakan dalam sistem pengereman pada sebagian besar kereta bawah tanah dan kereta cepat menggunakan prinsip induksi elektromagnetik dan arus pusar. Sebuah elektromagnet yang ditempelkan pada kereta diletakkan di dekat rel baja. Pengereman terjadi ketika arus yang besar dialirkan melalui elektromagnetnya. Gerak relatif magnet dan rel menginduksikan arus pusar pada rel, dan arah arus-arus ini menghasilkan gaya hambat pada kereta yang sedang bergerak (Serway dan Jewet, 2010).
Eksperimen gaya redaman magnetik dilakukan salah satunya dengan cara mengosilasi lempengan logam di dalam medan magnet. Ketika lempengannya memasuki medan magnet, fluks magnetik yang berubah menginduksikan suatu ggl pada lempengan yang mengakibatkan elektron-elektron bebas pada lempengan bergerak dan menghasilkan arus pusar yang berputar. Menurut hukum Lenz, arah arus pusar menghasilkan medan magnet yang melawan perubahan yang menyebabkan arusnya. Oleh karena alasan ini, arus pusar haruslah menghasilkan kutub-kutub magnetik yang efektif pada lempengan yang ditolak oleh kutub-kutub dari magnet. Hal ini membuat munculnya gaya tolak yang melawan gerak lempengan (Serway dan Jewet, 2010).
Penelitian serupa telah dilakukan pada pandulum-magnet dan berbagai lempeng konduktor bahan (kuningan, aluminium, dan tembaga) dengan menganalisis video menggunakan aplikasi tracker (Hediana, 2019). Pada penelitian tersebut, lempengan konduktor bahan diletakkan di hadapan pandulum yang ditempeli magnet dan disimpangkan. Pada penelitian ini, magnet dan lempengan logam konduktor digunakan sebagai peredam pergerakan osilasi pandulum fisis. Pandulum mengalami osilasi dan perlahan-lahan berhenti seiring berjalannya waktu. Peristiwa redaman dapat diamati pada pandulum-magnet yang berosilasi pada setiap lempengan konduktor pada jarak tertentu. Proses osilasi tersebut direkam menggunakan kamera dan dianalisis menggunakan software tracker. Hasil penelitian menunjukkan bahwa nilai koefisien redaman berbanding terbalik dengan jarak untuk semua lempengan logam. Nilai koefisien redaman dari yang paling besar ke kecil secara berurutan adalah tembaga, aluminium, dan kuningan.
Penelitan untuk mencari koefisien redaman magnetik juga telah dilakukan dengan merekam pergerakan magnet Neodymium yang bergerak di atas bidang aluminium (Sriraharjo, 2015). Untuk mendapatkan koefisien redaman, magnet Neodymium yang bergerak direkam menggunakan kamera video dan dianalisis menggunakan software pengolah video Logger Pro sehingga diperoleh data posisi fungsi waktu. Data tersebut kemudian difit dengan persamaan gerak magnet teredam sehingga diperoleh nilai kecepatan terminal. Selanjutnya nilai kecepatan
terminal fungsi sudut digunakan untuk mendapatkan nilai koefisien redaman magnetik. Hasil pengukuran menunjukkan bahwa terdapat hubungan linear antara ketebalan bidang aluminium terhadap nilai koefisien redaman magnetik.
Eksperimen redaman magnetik yang lainnya dilakukan dengan menjatuhkan magnet berukuran relatif kecil ke dalam pipa aluminium. Pipa aluminium bagian luar dililit kawat kemudian kawat dihubungkan dengan oskiloskop. Sinyal tegangan yang terbaca pada oskiloskop digunakan untuk menentukan posisi fungsi waktu dari magnet yang bergerak. Pipa aluminium divariasi ketebalannya untuk melihat pengaruh ketebalan pipa aluminium terhadap nilai koefisien redaman magnetik (Donoso dkk, 2009).
Pada penelitian ini, peneliti mencari nilai koefisien redaman magnetik pada magnet yang bergerak di dalam pipa aluminium dengan variasi diameter dalam pipa aluminium dan menganalisisnya menggunakan software Logger Pro. Model penelitian yang dilakukan mengikuti settingan penelitian yang dilakukan oleh Syed dan Nuessle (2019) dengan bantuan pesawat Atwood. Dalam penelitiannya, Syed dan Nuessle menggantungkan magnet dan beban pada kedua ujuang tali penggantung yang dilewatkan pada katrol dan sensor gerak putar Vernier RMV-BTD. Sensor gerak putar digunakan untuk mendapatkan data posisi fungsi waktu dan kecepatan fungsi waktu. Mengingat sensor gerak putar Vernier RMV-BTD belum tersedia di laboratorium fisika Universitas Sanata Dharma dan harganya yang sangat mahal, maka untuk mendapatkan data posisi fungsi waktu magnet yang bergerak di dalam pipa aluminium dapat dilakukan dengan cara merekam pergerakan beban penggantung yang diikatkan pada salah satu ujung tali yang bergerak vertikal ke bawah akibat adanya gaya gravitasi, dengan asumsi bahwa gerakkan beban yang digantung merepresentasikan gerakkan magnet di dalam pipa aluminium. Gerakan beban penggantung yang bergerak vertikal ke bawah dianalisis menggunakan software Logger Pro untuk mendapatkan data posisi fungsi waktu.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah diuraikan, adapun permasalahan yang akan dikaji dalam penelitian ini adalah sebagai berikut
1. Bagaimana cara mengukur nilai koefisien redaman magnetik pada gerak magnet teredam?
2. Bagaimana pengaruh diameter dalam pipa aluminium terhadap nilai koefisien redaman magnetik?
1.3 Batasan Masalah
Pada penelitian ini, masalah dibatasi pada:
1. Redaman magnetik yang diamati dan koefisien redaman magnetik yang dihitung nilainya hanya pada magnet yang bergerak di dalam pipa aluminium.
2. Magnet yang digunakan adalah magnet jenis Neodymium (NdFeB) yang berbentuk keping
3. Hambatan udara dalam penelitian ini diasumsikan pengaruhnya sangat kecil mengingat bentuk magnet dan beban penggantung yang jatuh yang relatif kecil maka pengaruh ini diabaikan.
1.4 Tujuan Penelitian
Adapun tujuan dilakukannya penelitian ini adalah sebagai berikut
1. Mengukur nilai koefisien redaman magnetik pada magnet yang bergerak di dalam pipa aluminium.
2. Melihat pengaruh diameter dalam pipa aluminium terhadap nilai koefisien redaman magnetik.
1.5 Manfaat Penelitian
Penelitian ini diharapkan dapat memberikan manfaat 1. Bagi Peneliti
a. Dapat mengukur nilai koefisien redaman magnetik pada magnet yang bergerak di dalam pipa aluminium dengan menggunakan analisis video.
b. Dapat menggunakan kamera video untuk menunjukkan gerak magnet teredam dan mengukur nilai koefisien redaman magnetik.
c. Mengembangkan kemampuan menganalisis rekaman video dengan software pengolah video Logger Pro.
2. Bagi Pembaca
a. Mengetahui cara menentukan nilai koefisien redaman pada magnet yang bergerak di dalam pipa aluminium
b. Mengetahui bahwa kamera video dapat digunakan untuk menunjukkan gerak magnet teredam dan mengukur nilai koefisien redaman magnetik.
c. Menggunakan rekaman video untuk menunjukkan gerak magnet teredam dan mengukur nilai koefisien redaman magnetik.
1.6 Sistematika Penulisan
1. BAB 1 Pendahuluan
Bab 1 berisi latar belakang masalah, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian, dan sistematika penulisan.
2. BAB 2 landasan teori
Bab 2 berisi teori-teori yang mendukung penelitian seperti medan magnet dan gerak benda di dalam pipa aluminium.
3. BAB 3 Metodologi penelitian
Bab 3 berisi alat, bahan, settingan alat, prosedur penelitian, dan cara pengolahan data.
4. BAB 4 Hasil dan pembahasan
Bab 4 berisi hasil pengolahan data dan pembahasan dari hasil eksperimen yang diperoleh.
5. BAB 5 Penutup
7
BAB 2
LANDASAN TEORI
2.1 Medan Magnet
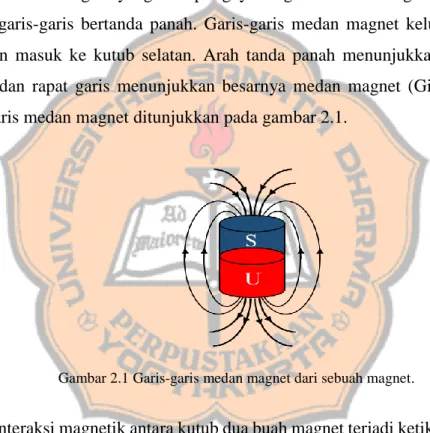
Magnet memiliki dua buah kutub yaitu kutub utara dan kutub selatan. Magnet menghasilkan medan magnet di sekitarnya. Medan magnet merupakan ruang di sekitar magnet yang terdapat gaya magnet. Medan magnet digambarkan dengan garis-garis bertanda panah. Garis-garis medan magnet keluar dari kutub utara dan masuk ke kutub selatan. Arah tanda panah menunjukkan arah medan magnet dan rapat garis menunjukkan besarnya medan magnet (Giancoli, 2014). Garis-garis medan magnet ditunjukkan pada gambar 2.1.
Gambar 2.1 Garis-garis medan magnet dari sebuah magnet.
Interaksi magnetik antara kutub dua buah magnet terjadi ketika kutub-kutub tersebut dihadapkan. Dua buah kutub tak sejenis yang dihadapkan akan tarik menarik. Sebaliknya dua buah kutub sejenis yang dihadapkan akan tolak-menolak.
2.2 Hukum Biot Savart
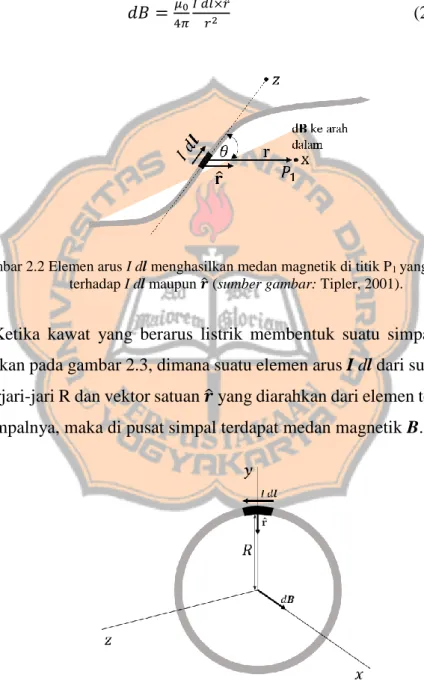
Medan magnetik B dapat dihasilkan dari kawat berarus listrik. Menurut Biot Savart, jika suatu kawat penghantar dialiri arus listrik maka disekitar kawat penghantar berarus listrik tersebut akan timbul medan magnet seperti yang ditunjukkan pada gambar 2.2. Besarnya kuat medan magnet (dB) di suatu titik
berbanding lurus dengan kuat arus listrik (I), panjang elemen penghantar (dl) dan berbanding terbalik dengan kuadrat jarak titik ke kawat penghantar (r2) serta bergantung pada besar sudut antara elemen penghantar dengan garis hubung ke titik tersebut (𝜃) dan nilai permeabilitas medium (µ) seperti yang dirumuskan pada persamaan (2.1) (Tipler, 2001)
𝑑𝐵 = 𝜇0
4𝜋 𝐼 𝑑𝑙×𝑟̂
𝑟2 (2.1)
Gambar 2.2 Elemen arus I dl menghasilkan medan magnetik di titik P1 yang tegak lurus
terhadap I dl maupun 𝒓̂ (sumber gambar: Tipler, 2001).
Ketika kawat yang berarus listrik membentuk suatu simpal seperti yang ditunjukkan pada gambar 2.3, dimana suatu elemen arus I dl dari suatu simpal arus yang berjari-jari R dan vektor satuan 𝒓̂ yang diarahkan dari elemen tersebut menuju pusat simpalnya, maka di pusat simpal terdapat medan magnetik B.
Gambar 2.3 Elemen arus untuk menghitung medan magnetik di pusat simpal arus melingkar (sumber gambar: Tipler, 2001).
Besarnya medan magnetik B di pusat simpal akibat elemen arus diarahkan sepanjang sumbu simpalnya, dan besarannya itu diberikan oleh
𝑑𝐵 = 𝜇0
4𝜋
𝐼 𝑑𝑙 𝑠𝑖𝑛 𝜃
𝑅2 (2.2)
dengan 𝜽: sudut antara I dl dan 𝒓̂, yang besarnya 900 untuk setiap elemen arus,
sehingga 𝐬𝐢𝐧 𝜽 = 𝟏.
Besarnya kuat medan magnetik akibat arus keseluruhan diperoleh dengan mengintegralkannya untuk seluruh elemen arus dalam simpalnya. Karena R sama untuk semua elemen maka kita peroleh
𝐵 = ∮ 𝑑𝐵 =4𝜋𝜇0𝑅𝐼2∮ 𝑑𝑙 (2.3) 𝐵 = 𝜇0 4𝜋 𝐼 2𝜋𝑅 𝑅2 = 𝜇0𝐼 2𝑅 (2.4) 2.3 Gaya Lorentz
Suatu kawat lurus berarus listrik yang ditempatkan di dalam medan magnetik, maka terdapat gaya pada kawat tersebut yang besarnya sama dengan penjumlahan gaya magnetik pada partikel bermuatan yang gerakkannya menghasilkan arus. Potongan kawat dengan luas penampang A dan panjang l yang menyalurkan arus listrik I seperti yang ditunjukkan pada gambar 2.4
Gambar 2.4 Potongan kawat yang panjangnya l sedang menyalurkan arus listrik I (sumber gambar: Tipler, 2001).
Jika kawat ini berada dalam medan magnetik B, gaya magnetik pada setiap muatan ialah (Tipler, 2001)
𝐅 = 𝑞𝐯𝐝× 𝐁 (2.5)
Jumlah muatan dalam potongan kawat ini merupakan jumlah n per satuan volume dikali Al. Dengan demikian gaya total pada potongan kawat ini ialah
𝐅 = (𝑞𝐯𝐝× 𝐁)𝑛𝐴𝑙 (2.6)
Dari persamaan (2.6), arus dalam kawat ini ialah
𝐼 = 𝑛𝑞𝐯𝐝𝐴 (2.7)
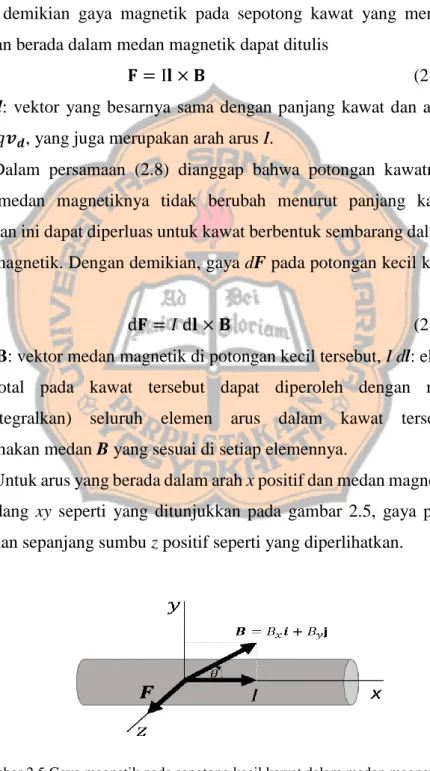
Dengan demikian gaya magnetik pada sepotong kawat yang mengalirkan arus listrik dan berada dalam medan magnetik dapat ditulis
𝐅 = I𝐥 × 𝐁 (2.8)
dengan l: vektor yang besarnya sama dengan panjang kawat dan arahnya sejajar dengan 𝑞𝒗𝒅, yang juga merupakan arah arus I.
Dalam persamaan (2.8) dianggap bahwa potongan kawatnya lurus dan bahwa medan magnetiknya tidak berubah menurut panjang kawat tersebut. Persamaan ini dapat diperluas untuk kawat berbentuk sembarang dalam sembarang medan magnetik. Dengan demikian, gaya dF pada potongan kecil kawat dl dapat ditulis
d𝐅 = 𝐼 d𝐥 × 𝐁 (2.9)
dengan B: vektor medan magnetik di potongan kecil tersebut, I dl: elemen arus. Gaya total pada kawat tersebut dapat diperoleh dengan menjumlahkan (mengintegralkan) seluruh elemen arus dalam kawat tersebut, dengan menggunakan medan B yang sesuai di setiap elemennya.
Untuk arus yang berada dalam arah x positif dan medan magnetiknya berada pada bidang xy seperti yang ditunjukkan pada gambar 2.5, gaya pada kawatnya diarahakan sepanjang sumbu z positif seperti yang diperlihatkan.
Gambar 2.5 Gaya magnetik pada sepotong kecil kawat dalam medan magnetik (sumber
Besarnya gaya F pada sepotong kawat pada gambar 2.5 ditentukan oleh
𝐹 = 𝐼𝑙𝐵 𝑠𝑖𝑛 𝜃 (2.10)
dengan 𝜃: sudut antara sumbu x dengan bidang xy.
2.4 Fluks Magnet
Rapat garis medan magnet yang menembus bidang dengan luas tertentu dinamakan fluks magnetik. Besarnya fluks magnetik dipengaruhi oleh rapat garis medan magnet yang menembus bidang (B), luas bidang yang ditembus medan magnet (A) dan besarnya sudut yang dibentuk oleh arah medan magnet terhadap arah permukaan bidang (θ). Fluks magnetik ditunjukkan pada gambar 2.6 dan besar fluks magnetik (Φ) dirumuskan pada persamaan (2.11).
Gambar 2.6 Fluks magnetik (sumber gambar: Giancoli, 2014).
Φ = 𝐵𝐴 cos 𝜃 (2.11)
Hukum Faraday menyatakan bahwa fluks magnetik yang berubah terhadap waktu akan menghasilkan ggl induksi (𝜀). Pernyataannya tersebut didasari atas percobaan yang dilakukannya. Percobaan yang dilakukan oleh Faraday yaitu menghubungkan ujung-ujung kawat melingkar atau loop kawat ke galvanometer dan magnet digerakkan mendekat dan menjauhi kumparan pada arah pusat kumparan dengan kutub utara berada di dekat kumparan seperti yang ditunjukkan pada gambar 2.7
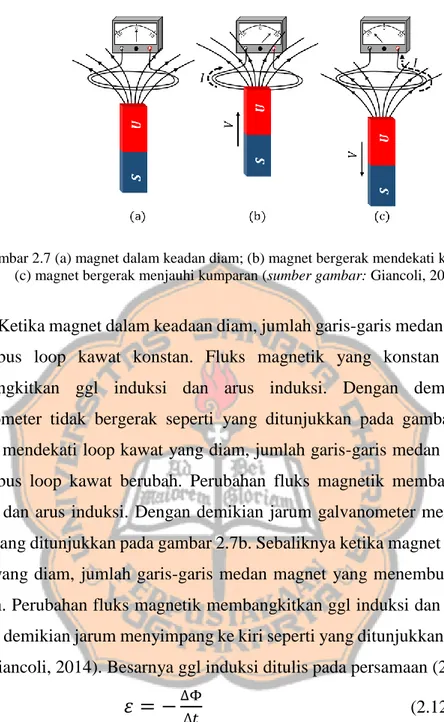
Gambar 2.7 (a) magnet dalam keadan diam; (b) magnet bergerak mendekati kumparan; (c) magnet bergerak menjauhi kumparan (sumber gambar: Giancoli, 2014).
Ketika magnet dalam keadaan diam, jumlah garis-garis medan magnet yang menembus loop kawat konstan. Fluks magnetik yang konstan tidak dapat membangkitkan ggl induksi dan arus induksi. Dengan demikian jarum galvanometer tidak bergerak seperti yang ditunjukkan pada gambar 2.7a. Saat magnet mendekati loop kawat yang diam, jumlah garis-garis medan magnet yang menembus loop kawat berubah. Perubahan fluks magnetik membangkitkan ggl induksi dan arus induksi. Dengan demikian jarum galvanometer menyimpang ke kanan yang ditunjukkan pada gambar 2.7b. Sebaliknya ketika magnet mejauhi loop kawat yang diam, jumlah garis-garis medan magnet yang menembus loop kawat berubah. Perubahan fluks magnetik membangkitkan ggl induksi dan arus induksi. Dengan demikian jarum menyimpang ke kiri seperti yang ditunjukkan pada gambar 2.7c (Giancoli, 2014). Besarnya ggl induksi ditulis pada persamaan (2.12).
𝜀 = −
∆Φ∆𝑡 (2.12)
dengan ΔΦ: perubahan fluks (Tm2 atau Wb); Δt: selang waktu (s)
Tanda negatif pada persamaan hukum Faraday berhubungan dengan arah ggl induksinya. Arah ggl induksi dan arus induksi dapat diperoleh dari prinsip hukum Lenz yang menyatakan bahwa ggl induksi akan membangkitkan arus induksi yang arah medan magnetnya sedemikian hingga berlawanan arah dengan perubahan fluks magnetik. Ketika fluks magnetik bertambah, ggl induksi yang dibangkitkan menghasilkan fluks pengurang. Sebaliknya ketika fluks magnetik
berkurang, ggl induksi yang dibangkitkan menghasilkan fluks penambah seperti yang ditunjukkan pada gambar 2.8.
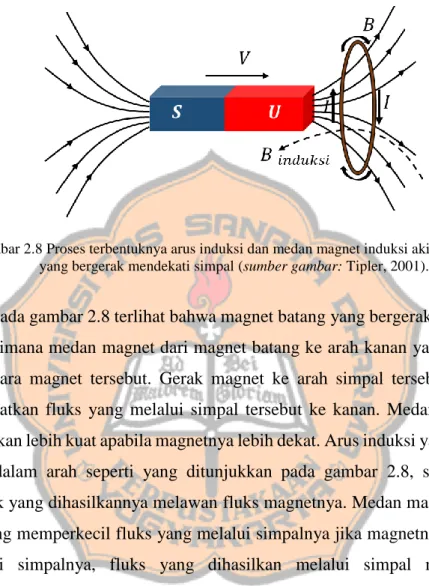
Gambar 2.8 Proses terbentuknya arus induksi dan medan magnet induksi akibat magnet yang bergerak mendekati simpal (sumber gambar: Tipler, 2001).
Pada gambar 2.8 terlihat bahwa magnet batang yang bergerak ke arah suatu simpal dimana medan magnet dari magnet batang ke arah kanan yang keluar dari kutub utara magnet tersebut. Gerak magnet ke arah simpal tersebut cenderung meningkatkan fluks yang melalui simpal tersebut ke kanan. Medan magnetik di simpal akan lebih kuat apabila magnetnya lebih dekat. Arus induksi yang dihasilkan berada dalam arah seperti yang ditunjukkan pada gambar 2.8, sehingga fluks magnetik yang dihasilkannya melawan fluks magnetnya. Medan magnetik induksi cenderung memperkecil fluks yang melalui simpalnya jika magnetnya digerakkan menjauhi simpalnya, fluks yang dihasilkan melalui simpal magnet kecil. Akibarnya, arus induksi yang dihasilkan berada dalam arah berlawanan pada gambar 2.8, sehingga medan magnetik induksi yang dihasilkan mengarah ke kanan guna memperbesar fluks magnetik yang melalui simpal.
2.5 Gerak Magnet
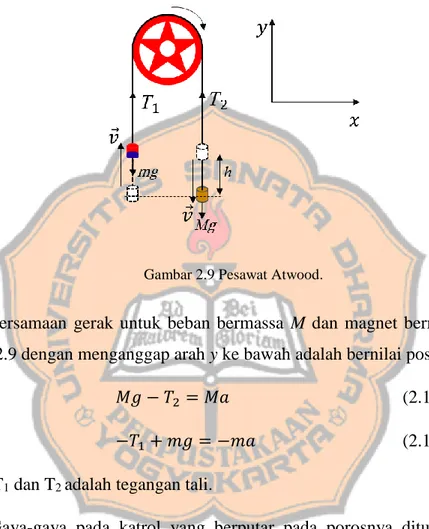
Sebuah pesawat atwood terdiri atas sebuah magnet bermassa m dan beban bermassa M yang dihubungkan dengan sebuah tali ringan dan digantungkan pada katrol diam yang licin. Jika massa beban lebih besar dari massa magnet (M > m)
maka beban M akan bergerak vertikal ke bawah sejauh h akibat adanya gaya gravitasi bumi (g) dengan percepatan a dan magnet m akan bergerak vertikal ke atas dengan jarak dan percepatan yang sama seperti yang ditunjukkan pada gambar 2.9.
Gambar 2.9 Pesawat Atwood.
Persamaan gerak untuk beban bermassa M dan magnet bermassa m pada gambar 2.9 dengan menganggap arah y ke bawah adalah bernilai positif mengikuti
𝑀𝑔 − 𝑇2 = 𝑀𝑎 (2.13)
−𝑇1+ 𝑚𝑔 = −𝑚𝑎 (2.14)
dengan T1 dan T2 adalah tegangan tali.
Gaya-gaya pada katrol yang berputar pada porosnya ditunjukkan pada gambar 2.10.
Gambar 2.10 Gaya-gaya pada katrol (sumber gambar: Santosa dkk, 2017).
Pergerakan katrol pada gambar 2.10 akan mengikuti persamaan sebagai berikut − 𝑇1− 𝑚𝑘𝑔− 𝑇2+ 𝑁 = 0 (2.15)
( 𝑇2− 𝑇1)𝑅 = 𝐼𝛼 (2.16)
𝛼 =
𝑎𝑅 (2.17)
dengan 𝑇1 & 𝑇2: tegangan tali, 𝑚𝑘: massa katrol, N: gaya normal pada katrol, I: momen inersia katrol, R: jari-jari katrol, 𝛼: percepatan sudut katrol, a: percepatan tangensial tepi katrol, yang sama dengan percepatan tali penggantung yang dililitkan pada katrol tanpa selip.
Dengan demikian, sistem pada gambar 2.9 akan bergerak dengan mengikuti persamaan (Santosa dkk, 2017) 𝑦 = 𝑣0𝑡 +1 2𝑎𝑡 2 (2.18) dengan percepatan
𝑎 =
(𝑀−𝑚) 𝑀+𝑚+ 𝐼 𝑅2g
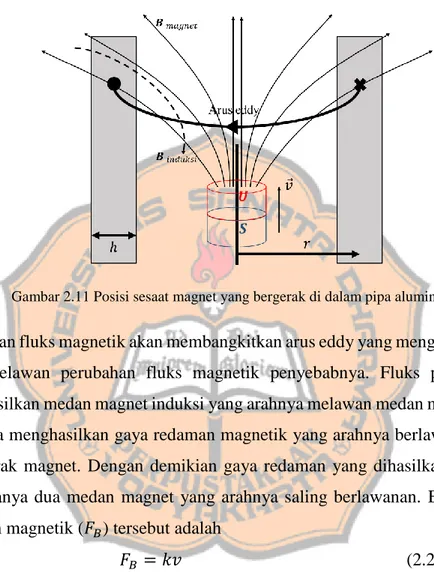
(2.19)Jika magnet yang bergerak vertikal ke atas berada di dalam pipa aluminium dengan jari-jari r dan ketebalan h seperti yang ditunjukkan oleh gambar 2.11, maka magnet yang bergerak tersebut akan menghasilkan perubahan fluks magnetik.
Gambar 2.11 Posisi sesaat magnet yang bergerak di dalam pipa aluminium.
Perubahan fluks magnetik akan membangkitkan arus eddy yang menghasilkan fluks yang melawan perubahan fluks magnetik penyebabnya. Fluks pelawan akan menghasilkan medan magnet induksi yang arahnya melawan medan magnet semula sehingga menghasilkan gaya redaman magnetik yang arahnya berlawanan dengan arah gerak magnet. Dengan demikian gaya redaman yang dihasilkan disebabkan oleh adanya dua medan magnet yang arahnya saling berlawanan. Besarnya gaya redaman magnetik (𝐹𝐵) tersebut adalah
𝐹𝐵 = 𝑘𝑣 (2.20)
dengan k: koefisien redaman magnetik, v: kecepatan gerak magnet
Besarnya nilai koefisien redaman magnetik k pada persamaan (2.20) mengikuti (Syed and Nuessle, 2019):
𝑘 = (
18𝜋𝑓𝜎ℎ𝜇′2𝑟4
)
(2.21)dengan f: faktor numerik yang nilainya sama dengan (5/256)<0,0614; 𝜎: konduktivitas bahan dan 𝜇′: hasil dari perkalian antara momen dipol magnetik magnet (𝜇) dengan μ0 / 4π.
Pada magnet yang bergerak vertikal ke atas di dalam pipa aluminium yang memiliki jari-jari r dan ketebalan h, gaya-gaya yang mempengaruhi gerak magnet adalah gaya gravitasi, tegangan tali dan gaya redaman magnetik yang dirumuskan pada persamaan (2.22).
𝑚 (𝑑𝑣
𝑑𝑡) = 𝑇 − 𝑚𝑔 − 𝐹𝐵 (2.22)
Dengan memasukkan nilai 𝐹𝐵 pada persamaan 2.20 maka persamaan 2.22
akan menjadi
𝑚 (𝑑𝑣
𝑑𝑡) = 𝑇 − 𝑚𝑔 − 𝑘𝑣 (2.23)
Solusi persamaan (2.23) untuk kondisi magnet memberikan persamaan kecepatan (v) fungsi waktu (t) mengikuti (Syed and Nuessle, 2019)
𝑣(𝑡) = 𝑣𝑇[1 − exp (−𝑡
𝜏)] (2.24)
dengan konstanta waktu (𝜏) adalah
𝜏 =
(m + M)𝑘 (2.25)
dan kecepatan terminal (𝑣𝑇) adalah
𝑣
𝑇=
(𝑀−𝑚)𝑘
𝑔
(2.26)Dari persamaan (2.24) diperoleh persamaan posisi (x) fungsi waktu (t) untuk magnet yang dirumuskan pada persamaan (2.27)
𝑧(𝑡) = 𝑣𝑇𝜏 [𝑡
𝜏 + 1 − 𝑒𝑥𝑝 (− 𝑡
𝜏)] (2.27)
Dalam penelitian ini nilai koefisien redaman magnetik yang paling maksimum ketika magnet bergerak dengan kecepatan konstan atau dengan kata lain ketika sistem bergerak lurus beraturan. Oleh karena itu, posisi magnet fungsi waktu dalam arah vertikal ketika magnet bergerak lurus beraturan mengikuti persamaan (2.28)
18
BAB 3
METODOLOGI PENELITIAN
Penelitian ini bertujuan untuk mengukur nilai koefisien redaman magnetik pada magnet Neodymium yang bergerak di dalam pipa aluminum. Ada dua buah eksperimen yang dilakukan yaitu eksperimen gerak magnet di ruang bebas udara dan eksperimen gerak magnet di dalam pipa aluminium. Eksperimen gerak magnet di dalam pipa aluminium pada salah satu eksperimen dimaksudkan untuk menunjukkan gerak magnet teredam. Ada tiga tahap yang dilakukan untuk mengukur nilai koefisien redaman magnetik yaitu setting alat, perekaman dan analisis data.
3.1 Seting alat
Settingan alat yang dilakukan dalam penelitian ini meliputi persiapan alat, bahan dan perangkaian alat.
3.1.1 Persiapan Alat dan Bahan 1) Magnet
Magnet yang digunakan adalah magnet Neodymium (NdFeB) berbentuk tabung dengan diameter (1,003 ± 0,001) × 10−2 meter dan tinggi
(1,001 ± 0,001) × 10−2 meter, serta memiliki massa sebesar (6,18 ±
0,02) × 10−3 kilogram. 2) Berbagai pipa aluminium
Pipa aluminium yang digunakan adalah pipa aluminium dengan ukuran panjang dan ketebalan yang sama namun diameter dalam ketiga pipa berbeda-beda. Panjang dan ketebalan masing-masing pipa berturut-turut adalah 1 m dan 3 mm. Diameter dalam berturut-turut ketiga pipa adalah sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3 meter dan
3) Tali penggantung
Tali penggantung yang digunakan dalam eksperimen ini adalah benang jahit berbahan nilon. Hal ini dilakukan mengingat benang jahit berbahan nilon ini memiliki massa yang sangat ringan namun memiliki struktur bahan yang kuat sehingga tidak mudah putus. Di samping itu pemilihan benang jahit juga dimaksudkan agar massa tali dapat diabaikan mengingat massa tali yang sangat ringan.
4) Beban
Beban yang digantungkan pada salah satu ujung tali penggantung yang digunakan dalam eksperimen ini adalah dua kepingan dengan massa 0,01 kg dan 0,02 kg.
5) Kamera
Kamera yang digunakan adalah kamera Canon EOS600D dengan kecepatan 24 frame/sekon digunakan untuk merekam gerak beban yang digantungkan pada salah satu ujung tali penggantung.
6) Tripod
Tripod digunakan untuk meletakkan kamera. Tripod dapat diatur sehingga kamera dapat dipasang tegak lurus terhadap rangkaian alat.
3.1.2 Perangkaian alat
Susunan alat dan foto set alat yang digunakan pada eksperimen gerak magnet di dalam pipa aluminium diperlihatkan pada gambar 3.1 dan gambar 3.2
Gambar 3.1 Susunan alat yang digunakan pada eksperimen gerak magnet di dalam pipa aluminium. A: magnet Neodymium (NdFeB), B: pipa aluminium, C: tali penggantung,
Gambar 3.2. Foto set alat untuk eksperimen gerak magnet Neodymium di dalam pipa aluminium.
Seperti yang ditunjukkan pada gambar 3.1, susunan alat menggunakan pesawat Atwood dengan dua buah katrol tetap yang terpasang pada masing-masing statip dan berada pada keadaan terpisah antara satu dengan yang lainnya. Pengaturan ini dilakukan dengan tujuan untuk memberi jarak antara beban yang jatuh dan pipa aluminium mengingat beban yang digunakan berupa logam yang jika berada dekat dengan pipa dapat mempengaruhi hasil penelitian
3.2 Prosedur dan Pengambilan Data
Magnet Neodymium yang bergerak di dalam pipa aluminium tidak dapat diamati secara langsung. Untuk dapat mengamati pergerakan magnet tersebut dapat dilakukan dengan mengamati pergerakan beban yang digantungkan pada salah satu ujung tali penggantung dengan langkah-langkah yang dilakukan adalah sebagai berikut:
1. Untuk eksperimen gerak magnet Neodymium di dalam pipa aluminium dengan diameter dalam sebesar (12,84 ± 0,01) × 10−3 meter, maka alat dirangkai seperti pada gambar 3.1 dengan massa beban 0,01 Kg.
2. Dua buah stiker dipasang pada ujung-ujung penggaris, kemudian penggaris diletakkan di samping lintasan gerakan beban sebagai standar jarak ketika menganalisis rekaman video.
3. Magnet Neodymium diletakkan pada bagian ujung bawah pipa aluminium. Sesaat setelah diletakkan magnet Neodymium akan bergerak naik melalui bagian dalam pipa akibat beban yang digantungkan pada ujung tali penggantung
4. Beban yang bergerak turun pada salah satu ujung tali direkam menggunakan video kamera sejak magnet diam di ujung bagian bawah pipa aluminium hingga bergerak mencapai ujung bagian atas pipa aluminium.
5. Langkah 2 dan 3 dilakukan sebanyak 3 kali
6. Langkah 1-4 diulangi untuk pipa aluminium dengan diameter dalam(18,98 ± 0,02) × 10−3 meter dan (25,91 ± 0,02) × 10−3 meter.
7. Langkah 1-5 diulangi untuk eksperimen gerak magnet Neodymium di ruang bebas udara (tanpa pipa aluminium).
8. Langkah 1-7 diulangi untuk massa beban penggantung 20 gram.
3.3 Pengolahan Data
Hasil rekaman video dianalisis menggunakan software pengolah video Logger Pro untuk mendapatkan data posisi fungsi waktu pada magnet Neodymium yang bergerak. Langkah-langkah menganalisis rekaman video adalah sebagai berikut:
1. Program Logger Pro dibuka, lalu dipilih menu insert dan sub menu movie yang diberi tanda kuning selanjutnya memilih video yang akan dianalisis kemudian klik open seperti pada pada gambar 3.3.
Gambar 3.3 Tampilan awal pada Logger Pro sebelum hasil rekaman video dimasukkan.
2. Untuk menganalisis video digunakan ikon video analysis yang terletak di sebelah kanan bawah yang diberi tanda bulat kuning seperti yang ditunjukkan pada gambar 3.4.
Gambar 3.4 Ikon video analysis untuk menganalisis video.
3. Untuk menentukan ukuran yang sesungguhnya digunakan ikon set scale dan untuk mengambil data digunakan ikon add point. Secara berturut-turut ditandai dengan lingkaran biru dan kuning pada gambar 3.5.
Gambar 3.5 Ikon set scale untuk menentukan ukuran sesungguhnya dan add point untuk mengambil data.
4. Untuk memberikan set scale, ditarik garis dari stiker yang satu ke stiker yang lainnya (ditunjukkan dengan garis berwarna hijau). Kemudian nilai jarak sesungguhnya antara dua stiker tersebut dimasukkan pada kotak isian scale yang ditunjukkan pada gambar 3.6.
Gambar 3.6 Pemberian garis set scale dan kotak isian scale ukuran panjang sesungguhnya
5. Saat titik-titik pada bagian beban diberikan (ditunjukkan dengan panah berwarna hijau) secara otomatis akan muncul titik-titik yang membentuk grafik pada posisi horizontal (x) dan posisi vertikal (y) ditunjukkan secara berturut-turut dengan
panah berwarna merah dan biru pada gambar 3.7. selanjutnya titik-titik data yang digunakan adalah titik-titik data pada posisi vertikal (y) yang berwarna biru.
Gambar 3.7 Titik-titik yang membentuk grafik pada posisi horizontal (x) dan posisi vertikal (y).
Untuk mendapatkan nilai kecepatan terminal (𝑣𝑇), grafik posisi fungsi waktu pada posisi vertikal magnet Neodymium yang bergerak di dalam pipa aluminium difit dengan persamaan (2.28) pada posisi magnet bergerak dengan kecepatan konstan (yang ditandai dengan garis lurus). Langkah-langkah memfit grafik posisi fungsi waktu adalah sebagai berikut
1. Untuk memfit grafik posisi fungsi waktu, bagian grafik yang menunjukkan kecepatan linear diblok lalu digunakan ikon linear fit di bagian atas yang ditandai dengan lingkaran berwarna merah pada gambar 3.8
Gambar 3.8 Ikon linear fit untuk memfit grafik posisi fungsi waktu untuk gerakan magnet dengan kecepatan konstan.
2. Setelah memilih linear fit akan muncul tampilan seperti pada gambar 3.9.
Gambar 3.9. Tampilan pada LoggerPro setelah meng-klik ikon linear fit.
Grafik posisi fungsi waktu yang difit dengan persamaan (2.28) mengasilkan nilai kecepatan terminal (𝑣𝑇) untuk satu pipa dengan diameter dalam tertentu. Selanjutnya nilai koefisien redaman magnetik diperoleh dengan memasukkan nilai kecepatan terminal pada persamaan (2.26).
26
BAB 4
HASIL PENELITIAN DAN PEMBAHASAN
Penelitian ini bertujuan untuk mengukur nilai koefisien redaman magnetik pada magnet Neodymium yang bergerak di dalam pipa aluminum. Hasil penelitian dan pembahasan dari penelitian ini akan diuraikan pada bagian ini.
4.1 Hasil
Hasil dan pembahasan dibagi menjadi tiga bagian yaitu beberapa hasil pengukuran, menunjukkan gerak magnet teredam dan pengukuran koefisien redaman magnetik.
4.1.1 Hasil pengukuran massa, diameter dan tinggi magnet Neodymium
Pengukuran massa magnet neodymium menggunakan neraca Ohaus tiga lengan. Pengukuran dilakukan beberapa kali sehingga diperoleh data hasil pengukuran seperti yang disajikan dalam tabel 4.1.
Tabel 4.1 Hasil pengukuran massa magnet Neodymium menggunakan neraca Ohaus
No Massa (g) 1 6,2 2 6,2 3 6,2 4 6,1 5 6,2
Dari data pada tabel 4.1 diperoleh nilai massa magnet Neodymium mengikuti perhitungan pada lampiran 1 adalah sebesar
Magnet yang digunakan dalam penelitian ini adalah magnet jenis Neodymium berbentuk tabung pejal. Pengukuran diameter dan tinggi magnet Neodymium menggunakan jangka sorong. Pengukuran dilakukan beberapa kali dan diperoleh data hasil pengukuran seperti yang disajikan dalam tabel 4.2.
Tabel 4.2 Hasil pengukuran diameter dan tinggi magnet Neodymium
No Diameter (cm) Tinggi (cm) 1 1 1 2 1,002 1,002 3 1,004 1 4 1,002 1 5 1,006 1,004
Dari data pada tabel 4.2 diperoleh nilai diameter dan tinggi magnet Neodymium secara berturut-turut adalah 𝐷 = (1,003 ± 0,001) × 10−2 m 𝑇 = (1,001 ± 0,001) × 10−2 m
4.1.2 Hasil pengukuran diameter dalam pipa aluminium
Pipa yang digunakan dalam penelitian ini menggunakan pipa aluminium dengan panjang dan ketebalan yang sama untuk semua varian pipa yaitu panjang 1 m dan ketebalan 3 mm dengan variasi diameter dalam pipa. Pengukuran diameter dalam pipa aluminium menggunakan jangka sorong. Pengukuran dilakukan beberapa kali sehingga diperoleh data hasil pengukuran diameter dalam pipa aluminium seperti yang disajikan dalam tabel 4.3.
Tabel 4.3 Hasil pengukuran diameter dalam berbagai pipa aluminium
No D1 (mm) D2 (mm) D3 (mm) 1 12,82 18,94 25,88 2 12,84 18,98 25,84 3 12,86 19,04 25,96 4 12,82 18,92 25,94 5 12,84 19 25,92
Dari data pada tabel 4.3 diperoleh nilai diameter dalam pipa aluminium dari yang terkecil ke yang tebesar secara berturut-turut adalah 𝐷1 = (12,84 ± 0,01) ×
10−3 meter, 𝐷
2 = (18,98 ± 0,02) × 10−3 meter dan 𝐷3 = (25,91 ± 0,02) ×
10−3 meter.
4.1.3 Menunjukkan gerak magnet teredam
Magnet Neodymium yang bergerak di dalam pipa aluminium tidak dapat diamati secara langsung. Untuk dapat mengamati pergerakan magnet tersebut dapat dilakukan dengan mengamati pergerakan beban yang digantungkan pada salah satu ujung tali penggantung. Gerakan beban tersebut direkam menggunakan kamera video. Hasil rekaman video dianalisis menggunakan software pengolahan video Logger Pro. Hasil analisis rekaman video berupa data posisi fungsi waktu.
Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ±
0,001) × 10−2 m yang bergerak di ruang bebas udara disajikan pada gambar 4.1.
Gambar 4.1 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di ruang bebas udara dengan massa beban
Untuk gerak magnet di dalam pipa aluminium, persamaan grafik difit menggunakan persamaan (2.28) untuk mendapatkan data posisi fungsi waktu pada gerak magnet dengan kecepatan konstan yang ditandai dengan bagian grafik berupa gerak lurus. Grafik posisi fungsi waktu untuk magnet yang bergerak di dalam pipa aluminium disajikan pada gambar 4.2.
Gambar 4.2 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter
(25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung 10 gram.
Perbandingan grafik posisi fungsi waktu untuk magnet Neodymium yang bergerak di ruang bebas udara dan grafik posisi fungsi waktu untuk magnet yang bergerak di dalam pipa aluminium dengan massa beban penggantung 10 gram disajikan pada gambar 4.3.
Gambar 4.3 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di ruang bebas udara (warna biru) dan di dalam pipa aluminium dengan diameter (25,91 ± 0,02) × 10−3 meter (warna merah
tua) dengan massa beban penggantung 10 gram.
Dari gambar 4.1 dapat dilihat bahwa dengan massa beban penggantung 10 gram, magnet Neodymium yang bergerak pada ruang bebas udara untuk selang waktu yang sama perubahan posisi magnet Neodymium semakin besar. Perubahan posisi setiap satu satuan waktu menunjukkan kecepatan. Dengan demikian kecepatan magnet Neodymium yang bergerak pada ruang bebas udara semakin besar.
Dari gambar 4.2 dapat dilihat bahwa dengan massa beban penggantung 10 gram, magnet Neodymium yang bergerak di dalam pipa aluminium untuk selang waktu yang sama perubahan posisi magnet Neodymium pada awal pergerakannya semakin cepat hingga selanjutnya untuk selang waktu yang sama perubahan posisi magnet sama. Dengan demikian kecepatan magnet Neodymium yang bergerak di dalam pipa aluminium mengalami perubahan yakni awalnya semakin besar hingga pada akhirnya magnet bergerak dengan kecepatan konstan.
Dari gambar 4.3 dapat dilihat bahwa dengan massa beban penggantung yang sama yaitu 10 gram, waktu yang digunakan untuk mencapai jarak lintasan yang sama oleh magnet Neodymium yang bergerak di ruang bebas udara lebih cepat dibandingkan dengan magnet Neodymium yang bergerak di dalam pipa aluminium.
Grafik posisi fungsi waktu untuk magnet Neodymium yang bergerak di ruang bebas udara.
Grafik posisi fungsi waktu untuk magnet Neodymium yang bergerak di dalam pipa aluminium.
Selain itu bentuk grafik antara magnet Neodymium yang bergerak di ruang bebas udara dengan magnet Neodymium yang bergerak di dalam pipa aluminium terlihat berbeda dimana grafik posisi fungsi waktu magnet Neodymium yang bergerak di ruang bebas udara (warna biru) lebih curam dibandingkan dengan magnet yang bergerak di dalam pipa aluminium (warna merah tua). Kecuraman bentuk grafik posisi fungsi waktu ini menunjukkan besarnya kenaikan kecepatan magnet Neodymium. Dengan demikian dapat dikatakan bahwa kecepatan akhir magnet Neodymium yang bergerak di ruang bebas udara lebih besar dibandingkan dengan kecepatan akhir magnet Neodymium yang bergerak di dalam pipa aluminium. 4.1.4 Pengukuran nilai koefisien redaman magnetik
Pengukuran koefisien redaman magnetik untuk satu massa beban penggantung dilakukan pengukuran sebanyak tiga pengukuran dengan variasi diameter dalam pipa aluminium. Hal ini dilakukan untuk melihat pengaruh diameter dalam pipa aluminium terhadap nilai koefisien redaman magnetik. Pada percobaan lain dilakukan pengukuran koefisien redaman magnetik dengan variasi massa beban penggantung pada satu ukuran diameter dalam pipa. Hal ini dilakukan untuk membuktikan bahwa dengan massa beban penggantung yang lain dapat diperoleh nilai koefisien redaman magnetik. Pengukuran koefisien redaman magnetik dengan variasi massa beban penggantung tidak dimaksudkan untuk melihat pengaruh massa beban penggantung terhadap nilai koefisien redaman magnetik.
Penelitian ini menggunakan magnet Neodymium dan pipa aluminium sebagai peredam. Magnet Neodymium yang digunakan bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m. Pipa aluminium yang digunakan adalah pipa aluminium dengan ukuran
panjang dan ketebalan yang sama dengan variasi diameter dalam ketiga pipa berbeda-beda. Panjang dan ketebalan masing-masing pipa berturut-turut adalah 1 m dan 3 mm. Diameter dalam berturut-turut ketiga pipa adalah sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3 meter dan (25,91 ±
0,02) × 10−3 meter. Massa beban penggantung yang digunakan dalam penelitian
Grafik posisi fungsi waktu untuk magnet Neodymium yang bergerak di dalam pipa aluminium difi dengan persamaan (2.28) untuk mendapatkan nilai kecepatan terminal (𝑣𝑇). Dari nilai kecepatan terminal (𝑣𝑇) yang diperoleh
selanjutnya digunakan untuk mendapatkan nilai koefisien redaman magnetik dengan bantuan persamaan (2.26) dengan memasukkan nilai massa magnet dan massa beban penggantung.
Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ±
0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam
sebesar (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar
10 gram ditunjukkan pada gambar 4.4
Gambar 4.4 Grafik posisi fungsi waktu untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter
(25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung 10 gram.
Sebagaimana yang telah dijelaskan pada bagian sebelumnya bahwa nilai koefisien redaman magnetik yang paling maksimum atau stabil ketika magnet bergerak dengan kecepatan konstan yang ditandai dengan titik-titik data yang membentuk garis lurus. Oleh karena itu, bagian grafik posisi fungsi waktu pada gambar 4.4 yang membentuk garis lurus difit dengan persamaan linear
posisi = 𝑚𝑡 + 𝑏 sesuai persamaan (2.28)
𝑧(𝑡) = 𝑣𝑇𝑡
Dari persamaan pada gambar 4.4 diperoleh nilai m = 0,4355. Nilai m sepadan dengan 𝑣𝑇. Sehingga nilai kecepatan terminal adalah sebesar 0,4355 m/s. Untuk menjamin keakuratan hasil pengukuran, pengukuran dilakukan sebanyak tiga kali. Grafik posisi fungsi waktu hasil pengukuran difit dengan persamaan (2.28) untuk mendapatkan kecepatan terminal. Nilai kecepatan terminal untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) ×
10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa
aluminium dengan diameter dalam sebesar (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 10 gram disajikan dalam tabel 4.4.
Tabel 4.4 Nilai kecepatan terminal untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam sebesar (25,91 ± 0,02) ×
10−3 meter dengan massa beban penggantung sebesar 10 gram
No 𝑣𝑇 (m/s)
1 0,4355
2 0,4250
3 0,4312
Dari tabel 4.4 kecepatan terminal rata-ratanya sesuai perhitungan pada lampiran 3 adalah sebesar (0,431 ± 0,003) m/s.
Nilai kecepatan terminal rata-rata, massa magnet dan massa beban penggantung dimasukkan dalam persamaan (2.26) untuk mendapatkan nilai koefisien redaman magnetik. Dengan demikian untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam sebesar (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 10 gram dengan mengikuti perhitungan pada lampiran 4 nilai koefisien redaman magnetiknya sebesar (267,40 ± 1,52) × 10−3 kg/s.
Cara yang sama dilakukan untuk menentukan nilai koefisien redaman magnetik untuk massa beban penggantung 20 gram. Dengan demikian untuk
magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam sebesar (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 20 gram dengan mengikuti perhitungan pada lampiran 4 maka nilai koefisien redaman magnetiknya sebesar (96,46 ± 0,20) × 10−3 kg/s.
Nilai koefisien redaman magnetik untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi
(1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan
diameter dalam sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3 meter dan (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 10 gram dan 20 gram disajikan secara berturut-turut pada tabel 4.5 dan tabel 4.6. Kemudian nilai koefisien redaman magnetik pada variasi diameter dalam pipa aluminium dengan massa beban penggantung 10 gram dan 20 gram disajikan pada gambar 4.5.
Tabel 4.5 Koefisien redaman magnetik untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001)𝑥10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam
sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3 meter dan (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar10 gram
No Diameter dalam pipa
aluminium (10−3 m) 𝑣𝑇 (m/s) Koefisien redaman magnetik (10−3 kg/s) 1 12,84 ± 0,01 0,048 ± 0,001 779,92 ± 16,75 2 18,98 ± 0,02 0,140 ± 0,003 267,40 ± 1,52 3 25,91 ± 0,02 0,431 ± 0,003 86,86 ± 0,76
Tabel 4.6 Koefisien redaman magnetik untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001)𝑥10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam
sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3 meter dan (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 20 gram
No Diameter dalam pipa
aluminium (10−3 m) 𝑣𝑇 (m/s) Koefisien redaman magnetik (10−3 kg/s) 1 12,84 ± 0,01 0,249 ± 0,001 543,92 ± 2,32 2 18,98 ± 0,02 0,786 ± 0,001 172,31 ± 0,33 3 25,91 ± 0,02 1,404 ± 0,002 96,46 ± 0,20
Gambar 4.5 Nilai koefisien redaman magnetik pada variasi diameter dalam pipa aluminium untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) × 10−2 m dengan massa beban
penggantung sebesar10 gram (warna biru) dan 20 gram (warna merah tua)
4.2 Pembahasan
Penelitian ini bertujuan untuk menentukan nilai koefisien redaman magnetik pada magnet yang bergerak di dalam pipa aluminium. Magnet yang bergerak di dalam pipa aluminium menghasilkan perubahan fluks magnetik. Perubahan fluks magnetik akan membangkitkan arus eddy yang menghasilkan fluks yang melawan perubahan fluks magnetik penyebabnya. Fluks pelawan akan menghasilkan medan magnet induksi yang arahnya melawan medan magnet semula sehingga menghasilkan gaya redaman magnetik yang arahnya berlawanan dengan arah gerak
magnet. Dengan demikian gaya redaman yang dihasilkan disebabkan oleh adanya dua medan magnet yang arahnya saling berlawanan.
Pada penelitian ini dilakukan pengukuran koefisien redaman magnetik pada magnet Neodymium yang bergerak di dalam pipa aluminium. Eksperimen dilakukan dengan dua tahap, yaitu pada tahap pertama eksperimen magnet yang bergerak di dalam pipa aluminium dan pada tahap kedua eksperimen dilakukan dengan magnet yang bergerak di ruang bebas udara. Tujuan dilakukan dua eksperimen adalah untuk melihat adanya gerakan teredam pada magnet yang bergerak di dalam pipa aluminium akibat adanya gaya redaman magnetik.
Rangkaian alat dalam eksperimen dilakukan seperti pada gambar 3.1 untuk eksperimen gerak magnet Neodymium di dalam pipa aluminium. Magnet Neodymium yang bergerak di dalam pipa aluminium tidak dapat diamati secara langsung. Untuk dapat mengamati pergerakan magnet tersebut dapat dilakukan dengan mengamati pergerakan beban penggantung yang diikatkan pada salah satu ujung tali yang bergerak vertikal ke bawah akibat adanya gaya gravitasi, dengan asumsi bahwa gerakkan beban yang digantung merepresentasikan gerakkan magnet di dalam pipa aluminium. Gerakan beban tersebut direkam menggunakan kamera video. Hasil rekaman video dianalisis menggunakan software pengolahan video Logger Pro. Hasil analisis rekaman video berupa data posisi fungsi waktu yang disajikan pada gambar 4.1, 4.2 dan 4.3.
Dari grafik posisi fungsi waktu pada gambar 4.3 dapat dilihat bahwa dengan massa beban penggantung yang sama yaitu 10 gram, waktu yang digunakan untuk mencapai jarak lintasan yang sama oleh magnet Neodymium yang bergerak di ruang bebas udara lebih cepat dibandingkan dengan magnet Neodymium yang bergerak di dalam pipa aluminium. Selain itu bentuk grafik antara magnet Neodymium yang bergerak di ruang bebas udara dengan magnet Neodymium yang bergerak di dalam pipa aluminium terlihat berbeda, dimana bentuk grafik posisi fungsi waktu magnet Neodymium yang bergerak di ruang bebas udara lebih curam dibandingkan dengan bentuk grafik magnet Neodymium yang bergerak di dalam pipa aluminium. Kecuraman bentuk grafik posisi fungsi waktu ini menunjukkan
besarnya kenaikan kecepatan magnet Neodymium. Dengan demikian dapat dikatakan bahwa kecepatan akhir magnet Neodymium yang bergerak di ruang bebas udara lebih besar dibandingkan dengan kecepatan akhir magnet Neodymium yang bergerak di dalam pipa aluminium.
Magnet yang bergerak di dalam pipa aluminium mengalami perubahan kecepatan hingga pada akhirnya magnet yang bergerak di dalam pipa aluminium bergerak dengan kecepatan konstan atau dengan kata lain magnet bergerak lurus beraturan yang di tandai dengan grafik yang linear. Perubahan kecepatan pada gerakan magnet menandakan adanya gaya yang meredam pergerakkan magnet, dan gaya tersebut adalah gaya redaman magnetik. Dengan demikian gerak magnet di dalam pipa aluminium merupakan gerak magnet teredam.
Gerak magnet teredam selanjutnya dianalisis lebih lanjut untuk mengukur koefisien redaman magnetiknya. Grafik posisi fungsi waktu untuk magnet Neodymium yang bergerak di dalam pipa aluminium difit dengan persamaan (2.28) sehingga diperoleh nilai kecepatan terminal (𝑣𝑇) untuk satu diameter dalam pipa dengan satu massa beban penggantung. Kemudian dilakukan cara yang sama untuk massa beban penggantung yang berbeda dan pipa yang berbeda dengan variasi diameter dalamnya. Dari nilai kecepatan terminal, massa beban penggantung dan massa magnet kemudian difit dengan persamaan (2.26) untuk mendapatkan nilai koefisien redaman magnetik.
Nilai koefisien redaman magnetik untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi
(1,001 ± 0,001) × 10−2 m yang bergerak di dalam pipa aluminium dengan
diameter dalam sebesar (12,84 ± 0,01) × 10−3 meter, (18,98 ± 0,02) × 10−3
meter dan (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 10 gram secara berturut-turut adalah (779,92 ± 16,75) × 10−3 kg/s, (267,40 ± 1,52) × 10−3 kg/s dan (86,86 ± 0,76) × 10−3 kg/s . Untuk satu massa beban penggantung yang sama, nilai koefisien redaman magnetik semakin kecil ketika diameter dalam pipa aluminium semakin besar. Hal ini membuktikan bahwa besarnya koefisien redaman magnetik berbanding terbalik dengan diameter dalam
pipa aluminium. Hubungan antara besarnya koefisien redaman magnetik dengan diameter dalam pipa ini sesuai dengan persamaan (2.21). Hal ini dikarenakan ketika diameter dalam pipa semakin besar, maka dengan magnet yang sama jumlah medan magnet yang menembus dinding pipa semakin kecil sehingga fluks magnetik yang dihasilkan juga semakin kecil sesuai dengan persamaan (2.11). Sehingga arus eddy yang dihasilkan juga semakin kecil yang menyebabkan medan magnetik induksi semakin kecil yang menyebabkan gaya redaman yang dihasilkan juga semakin kecil. Dengan demikian dapat disimpulkan bahwa besarnya nilai koefisien redaman magnetik bergantung pada diameter dalam pipa aluminium.
Dari hasil penelitian ini juga diperoleh nilai koefisien redaman magnetik pada satu ukuran diameter dalam pipa aluminium yan sama dengan massa beban penggantung yang berbeda. Untuk magnet Neodymium bermassa (6,18 ± 0,02) × 10−3 kg berdiameter (1,003 ± 0,001) × 10−2 m dan tinggi (1,001 ± 0,001) ×
10−2 m yang bergerak di dalam pipa aluminium dengan diameter dalam sebesar (25,91 ± 0,02) × 10−3 meter dengan massa beban penggantung sebesar 10 gram,
besarnya nilai koefisien redaman magnetik yang dihasilkan adalah sebesar (86,86 ± 0,76) × 10−3 kg/s. Dengan magnet dan pipa aluminium yang sama,
besarnya nilai koefisien redaman magnetik yang dihasilkan dengan massa beban penggantung sebesar 20 gram adalah sebesar (96,46 ± 0,20) × 10−3 kg/s. Hal ini
membuktikan bahwa untuk magnet Neodymium yang bergerak di dalam pipa aluminium, nilai koefisien redaman magnetik dapat diperoleh dengan massa beban penggantung yang berbeda.
Pada penelitian ini rekaman video digunakan untuk menunjukkan gerak magnet teredam. Dari hasil penelitian menunjukkan bahwa rekaman video dapat digunakan untuk membuktikan hukum Lenz. Sejauh ini media yang digunakan guru dalam menjelaskan materi fisika khususnya materi tentang hukum Lenz sangat terbatas. Untuk itu rekaman video dapat digunakan sebagai salah satu alternatif media pembelajaran berkaitan dengan materi hukum Lenz. Dengan demikian pembelajaran dapat lebih menarik sehingga antusias siswa dalam mengikuti pembelajaran diharapkan dapat meningkat.