BAB II
DASAR TEORI
2.1 Saklar
Saklar atau switch adalah sebuah alat yang berfungsi sebagai penghubung dan pemutus arus listrik. Dalam rangkaian elektronika dan rangkaian listrik saklar berfungsi untuk menghubungkan dan memutuskan arus listrik yang mengalir dari sumber menuju beban (output) atau dari sebuah sistem ke sistem lainnya. Pada Tabel 2.1 terdapat jenis-jenis saklar, simbol-simbol saklar, dan contoh fisik dari saklar.
Tabel 2.1 Jenis, Simbol, dan Contoh Bentuk Saklar
JENIS SAKLAR SIMBOL SAKLAR CONTOH FISIK
SPST
Saklar On-Off 2 terminal
Saklar Push-On Kedua terminal akan terhubung selama ditekan
Saklar Push-Off Kedua terminal akan terputus selama ditekan
Saklar SPDT Terminal sentral (COM) akan terhubung ke salah satu terminal dan akan
terputus ke terminal lainnya dalam satu
kondisi.
Saklar DPST Dalam kondisi On (“1”) dua terminal sentral akan
terhubung ke terminal pasangannya dan akan terputus ktika kondisi Off
(“0”) Saklar DPDT Dua terminal sentral akan
terhubung ke salah satu terminal pasangannya dan
terputus ke terminal pasangannya yang lain
dalam satu kondisi.
2.2 Mikrokontroler
Mikrokontroler adalah suatu sistem mikroprosesor yang lengkap dan dikemas dalam bentuk sebuah IC (single chip). Mikrokontroler ini merupakan terobosan teknologi mikroprosesor dan mikrokomputer yang digunakan untuk memenuhi kebutuhan pasar (market need). IC mikrokontroller memiliki perangkat penunjang seperti dalam mikrokomputer seperti unit pusat pengolahan data (Central Processing Unit), unit memori (ROM dan RAM) dan unit I/O.
Selain itu terdapat juga fasilitas - fasilitas seperti timer, counter, kontrol interupsi (interrupt Control) dan USART (Universal Sinchronous Asinchronous Receiver Transmitter). Mikrokontroler merupakan teknologi semikonduktor dengan kandungan transistor yang lebih banyak, namun hanya membutuhkan ruang yang kecil serta dapat diproduksi dalam jumlah yang banyak, sehingga harganya menjadi lebih murah jika dibandingkan dengan mikroposesor.
2.2.1 Mikrokontroler ATmega8535
ATmega8535 adalah mikrokontroler CMOS 8-bit daya-rendah. Kebanyakan instruksi dikerjakan pada satu siklus clock, ATmega8535 mempunyai throughput mendekati 1 MIPS per MHz membuat desain sistem untuk mengoptimalisasisi komsumsi daya versus kecepatan proses.
Mikrokontroler ATmega 8535 ini memiliki kelebihan-kelebihan jika dibandingkan dengan mikrokontroler yang lain diantaranya:
1. Mempunyai 8 chanel ADC yang terintegrasi dengan resolusi 10 Bit dengan metoda pengkonversian mnggunakan Succesive Aproximation. 2. Memiliki USART yang terintegrasi dengan band rate maksimum 20 Kbps. 3. Memiliki timer internal yang dapat difungsikan sebagai real-time timer. 4. Memiliki fungsi watchdog-timer yang dapat mencegah mikrokontroller
dari kesalahan operasi
5. Memiliki 6 fungsi untuk menghemat energi yaitu, idle, ADC noise reduction, power save, power down, standby dan extended standby mode. 6. Memiliki timer yang dapat difungsikan sebagai PWM (Pulse Widht
Modulation).
7. Pengoprasian memerlukan tegangan rendah, yaitu: 4.5V sampai dengan 6.5 V.
8. Pemrograman dapat dilakukan dengan mudah yaitu dengan cara in system programming, artinya mirokontroler ini dapat diganti programnya pada saat run time.
9. Memiliki 32 buah register untuk user dan 64 buah register yang digunakan sebagai pengontrol fitur-fitur yang terintegrasi dalam mikrokontroller ATmega 8535 ini.
10. Memiliki kristal internal hingga 8MHz.
2.2.2 Diagram Blok ATmega 8535
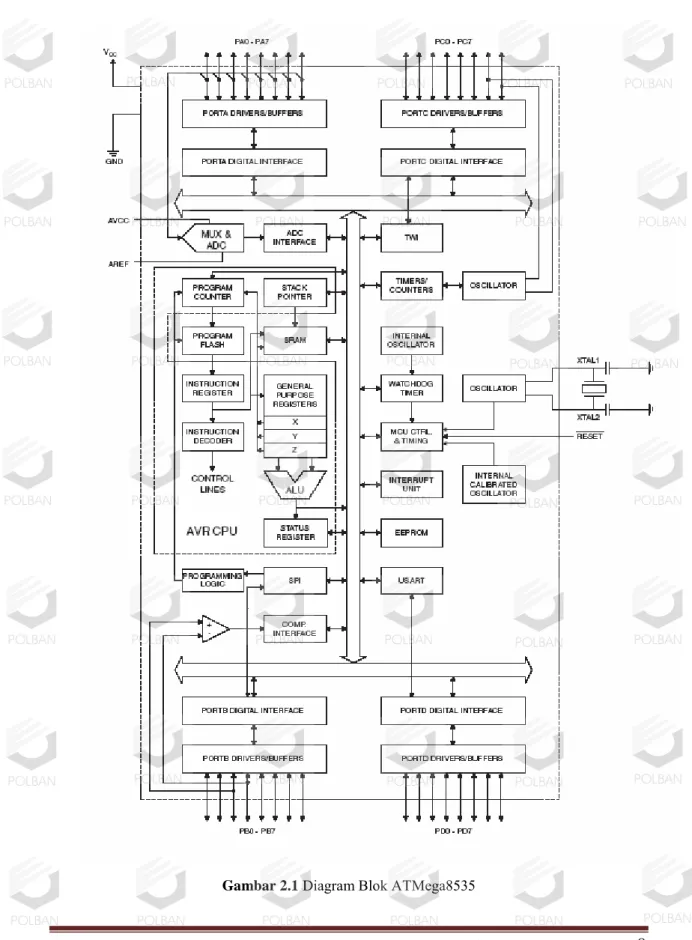
Inti dari AVR adalah dengan menyatukan beberapa instruksi dengan 32 register kerja serbaguna. Ke-32 register kerja serbaguna terhubung langsung dengan ALU, hal tersebut memungkinkan 2 buah register mandiri
diakses dengan sebuah instruksi dalam satu siklus clock. Blok diagram dapat dilihat pada Gambar 2.1 berikut:
Gambar 2.1 Diagram Blok ATMega8535
2.2.3 Arsitektur ATMega 8535
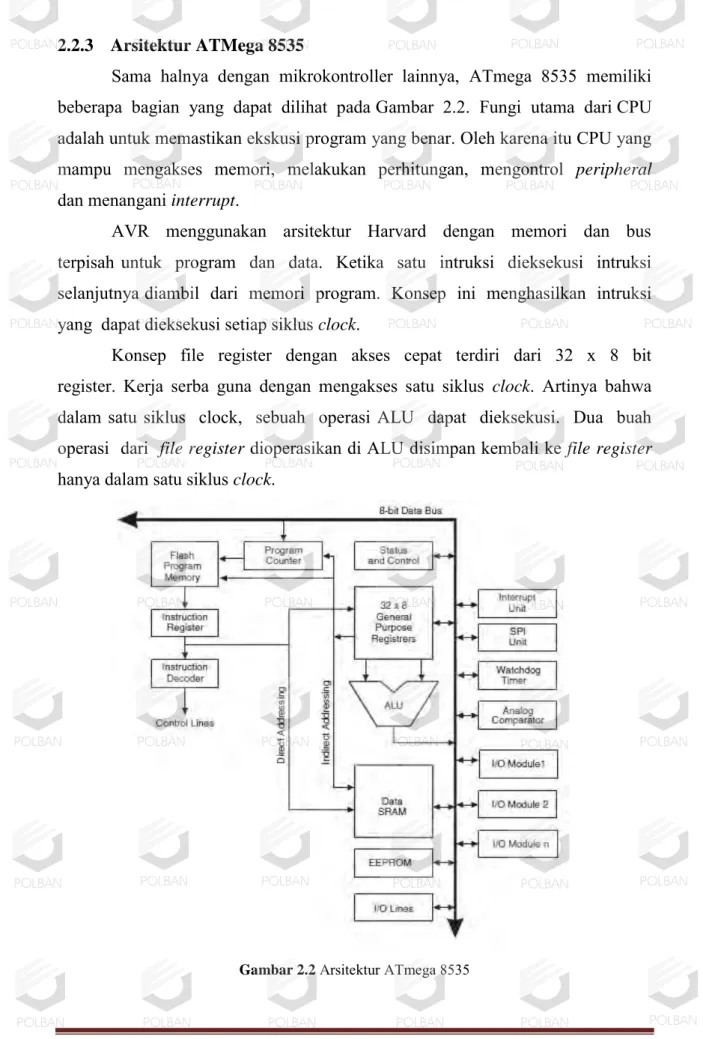
Sama halnya dengan mikrokontroller lainnya, ATmega 8535 memiliki beberapa bagian yang dapat dilihat pada Gambar 2.2. Fungi utama dari CPU adalah untuk memastikan ekskusi program yang benar. Oleh karena itu CPU yang mampu mengakses memori, melakukan perhitungan, mengontrol peripheral dan menangani interrupt.
AVR menggunakan arsitektur Harvard dengan memori dan bus terpisah untuk program dan data. Ketika satu intruksi dieksekusi intruksi selanjutnya diambil dari memori program. Konsep ini menghasilkan intruksi yang dapat dieksekusi setiap siklus clock.
Konsep file register dengan akses cepat terdiri dari 32 x 8 bit register. Kerja serba guna dengan mengakses satu siklus clock. Artinya bahwa dalam satu siklus clock, sebuah operasi ALU dapat dieksekusi. Dua buah operasi dari file register dioperasikan di ALU disimpan kembali ke file register hanya dalam satu siklus clock.
Gambar 2.2 Arsitektur ATmega 8535
Enam dari 32 register dapat digunakan sebagai tiga buah 16-bit register. Pointer alamat tidak langsung untuk pengalamatan ruang data. Satu dari tiga pointer ini dapt digunakan sebagai pointer alamat untuk look up tables didalam memori program flash.
ALU mendukung operasi aritmatika dan logika diantara register, konstanta dan sebuah register. Operasi register tunggal juga dapat dieksekusi didalam ALU. Setelah operasi aritmatik register status diperbaharui untuk memberikan informasi hasil operasi. Aliran program dilakukan oleh lompatan conditional dan unconditional juga intruksi kolom. Mampu mengalamati secara langsung seluruh ruang alamat. Kebanyakan intruksi AVR memiliki sebuah format 16 bit. Setiap alamat memori program terdiri dari intruksi 16 atau 32 bit.
Secara interrupt dan subroutine call alamat kendali program counter (PC) disimpan dalam stack. Stack ditempatkan didalam SRAM, dan dikonsekuensikan ukuran stabil yang dibatasi oleh total ukuran SRAM dan penggunaan SRAM dapat dengan mudah diakses melalui lima macam mode pengalamatan yang didukung dalam arsitektur AVR yang secara keseluruhan adalah peta memory linier dan regulator.
Modul interrupt memiliki register kontrol didalam ruang I/O dengan tambahan bit global interrupt enable didalam register status. Setiap interrupt memiliki interrupt vector yang terpisah didalam table interupsi vector. Interrupt memiliki polaritas berhubungan dengan posisi interrrupt vector-nya. Semakin rendah alamat interrupt vector, semakin tinggi polaritasnya. Ruang memori I/O terdiri dari 64 alamat untuk fungsi peripheral CPU sebagai control register, SPI dan fungsi I/O lainnya. Memori I/O dapat diakses secara langsung atau sebagai ruang data didalam file register 0 x 20 – 0 x 5F.
2.3 LCD
Kegunaan dari LCD sangat banyak, diantaranya dapat menampilkan suatu nilai hasil sensor, menampilkan teks, atau menampilkan menu pada aplikasi mikrokontroler. LCD yang banyak digunakan adalah jenis LCD M1632, karena jenis LCD ini merupakan modul LCD dengan tampilan 16x2 baris dengan konsumsi daya yang terbilang rendah. HDD470 ini memiliki CGROM (Character
Generator read Only Memory), CGRAM (Character Generator Random Access Memory), dan DDRAM (Display Data Random Access Memory).
2.3.1 Konfigurasi LCD
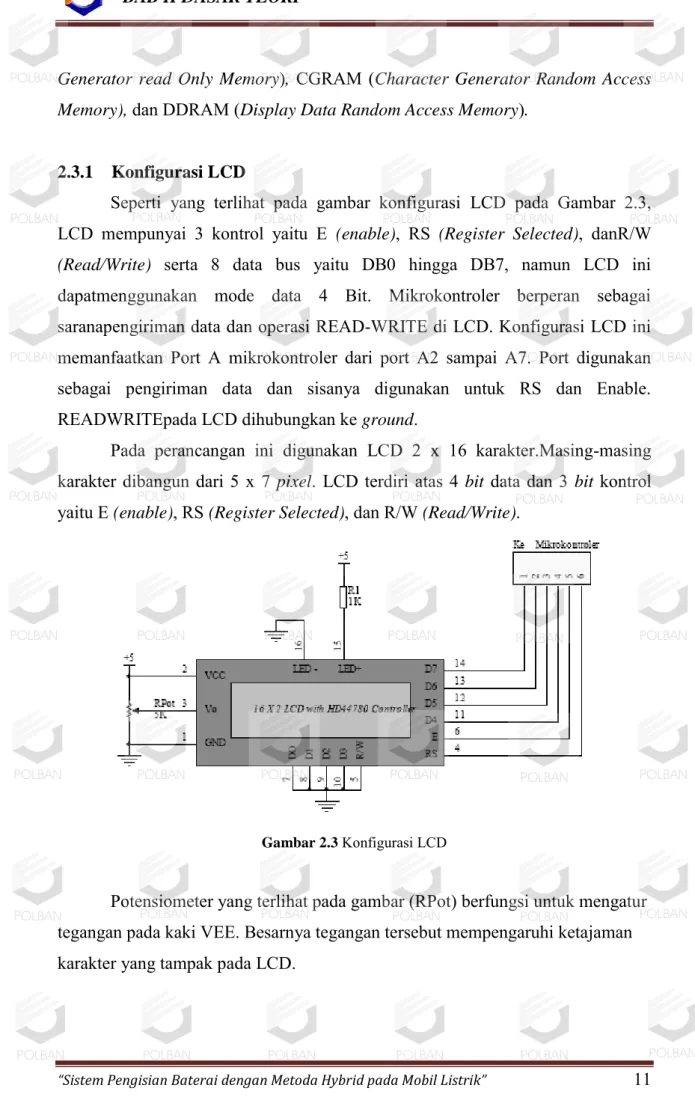
Seperti yang terlihat pada gambar konfigurasi LCD pada Gambar 2.3, LCD mempunyai 3 kontrol yaitu E (enable), RS (Register Selected), danR/W (Read/Write) serta 8 data bus yaitu DB0 hingga DB7, namun LCD ini dapatmenggunakan mode data 4 Bit. Mikrokontroler berperan sebagai saranapengiriman data dan operasi READ-WRITE di LCD. Konfigurasi LCD ini memanfaatkan Port A mikrokontroler dari port A2 sampai A7. Port digunakan sebagai pengiriman data dan sisanya digunakan untuk RS dan Enable. READWRITEpada LCD dihubungkan ke ground.
Pada perancangan ini digunakan LCD 2 x 16 karakter.Masing-masing karakter dibangun dari 5 x 7 pixel. LCD terdiri atas 4 bit data dan 3 bit kontrol yaitu E (enable), RS (Register Selected), dan R/W (Read/Write).
Gambar 2.3 Konfigurasi LCD
Potensiometer yang terlihat pada gambar (RPot) berfungsi untuk mengatur tegangan pada kaki VEE. Besarnya tegangan tersebut mempengaruhi ketajaman karakter yang tampak pada LCD.
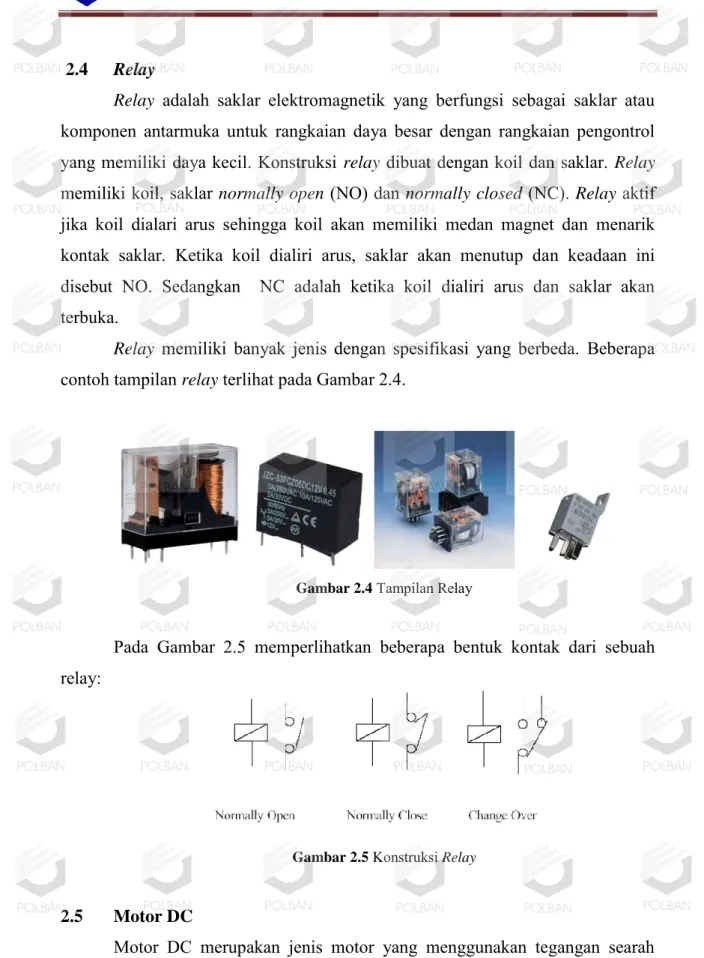
2.4 Relay
Relay adalah saklar elektromagnetik yang berfungsi sebagai saklar atau komponen antarmuka untuk rangkaian daya besar dengan rangkaian pengontrol yang memiliki daya kecil. Konstruksi relay dibuat dengan koil dan saklar. Relay memiliki koil, saklar normally open (NO) dan normally closed (NC). Relay aktif jika koil dialari arus sehingga koil akan memiliki medan magnet dan menarik kontak saklar. Ketika koil dialiri arus, saklar akan menutup dan keadaan ini disebut NO. Sedangkan NC adalah ketika koil dialiri arus dan saklar akan terbuka.
Relay memiliki banyak jenis dengan spesifikasi yang berbeda. Beberapa contoh tampilan relay terlihat pada Gambar 2.4.
Gambar 2.4 Tampilan Relay
Pada Gambar 2.5 memperlihatkan beberapa bentuk kontak dari sebuah relay:
Gambar 2.5 Konstruksi Relay
2.5 Motor DC
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua
terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula.
Polaritas dari tegangan yang diberikan pada dua terminal menentukan arah putaran motor sedangkan besar dari beda tegangan pada kedua terminal menentukan kecepatan motor.
Motor DC memiliki 2 bagian dasar :
1. Bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil (elektro magnet) ataupun magnet permanen.
2. Bagian yang berputar disebut rotor. Rotor ini berupa sebuah koil dimana arus listrik mengalir.
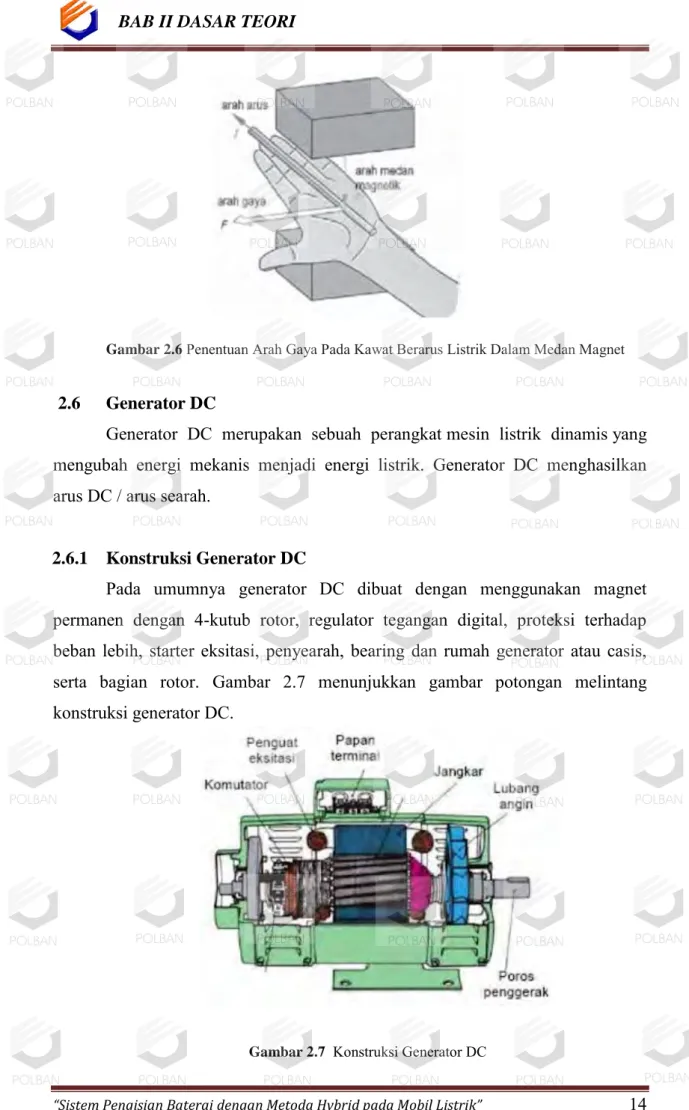
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya timbul tergantung pada arah arus dan arah medan magnet.
Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. Menurut hukum gaya Lourentz, arus yang mengalir pada penghantar yang terletak dalam medan magnet akan menimbulkan gaya. Gaya F, timbul tergantung pada arah arus I, dan arah medan magnet B. Arah gaya F dapat ditentukan dengan aturan tangan kiri seperti pada Gambar 2.6 berikut :
Gambar 2.6 Penentuan Arah Gaya Pada Kawat Berarus Listrik Dalam Medan Magnet
2.6 Generator DC
Generator DC merupakan sebuah perangkat mesin listrik dinamis yang mengubah energi mekanis menjadi energi listrik. Generator DC menghasilkan arus DC / arus searah.
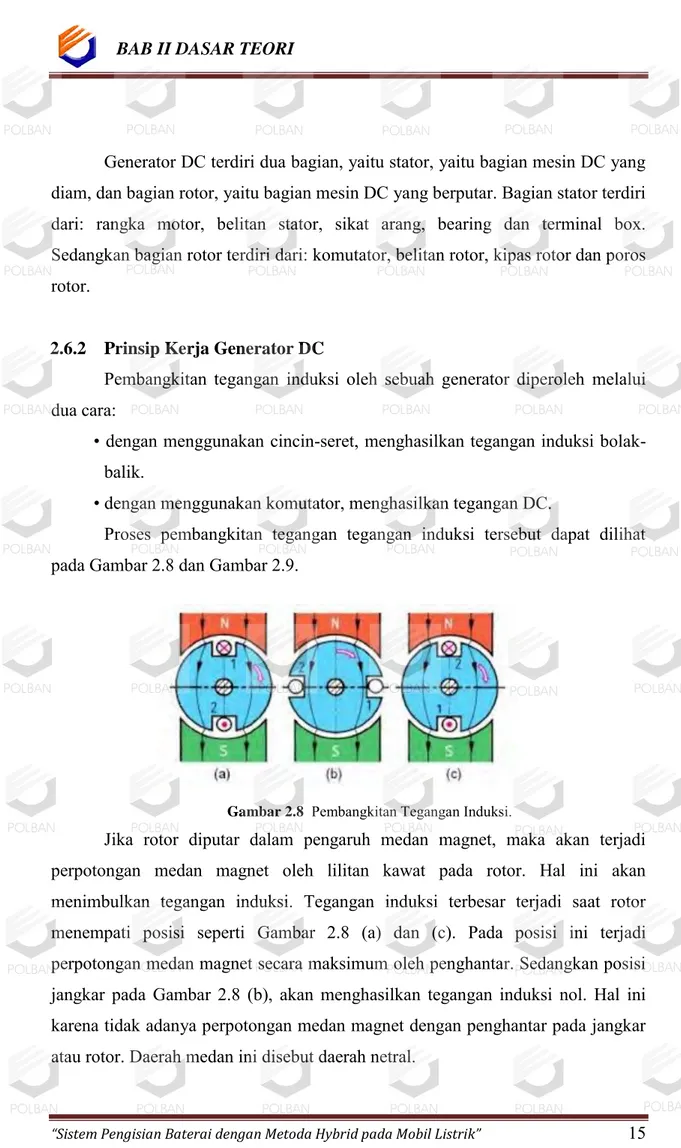
2.6.1 Konstruksi Generator DC
Pada umumnya generator DC dibuat dengan menggunakan magnet permanen dengan 4-kutub rotor, regulator tegangan digital, proteksi terhadap beban lebih, starter eksitasi, penyearah, bearing dan rumah generator atau casis, serta bagian rotor. Gambar 2.7 menunjukkan gambar potongan melintang konstruksi generator DC.
Gambar 2.7 Konstruksi Generator DC
Generator DC terdiri dua bagian, yaitu stator, yaitu bagian mesin DC yang diam, dan bagian rotor, yaitu bagian mesin DC yang berputar. Bagian stator terdiri dari: rangka motor, belitan stator, sikat arang, bearing dan terminal box. Sedangkan bagian rotor terdiri dari: komutator, belitan rotor, kipas rotor dan poros rotor.
2.6.2 Prinsip Kerja Generator DC
Pembangkitan tegangan induksi oleh sebuah generator diperoleh melalui dua cara:
• dengan menggunakan cincin-seret, menghasilkan tegangan induksi bolak-balik.
• dengan menggunakan komutator, menghasilkan tegangan DC.
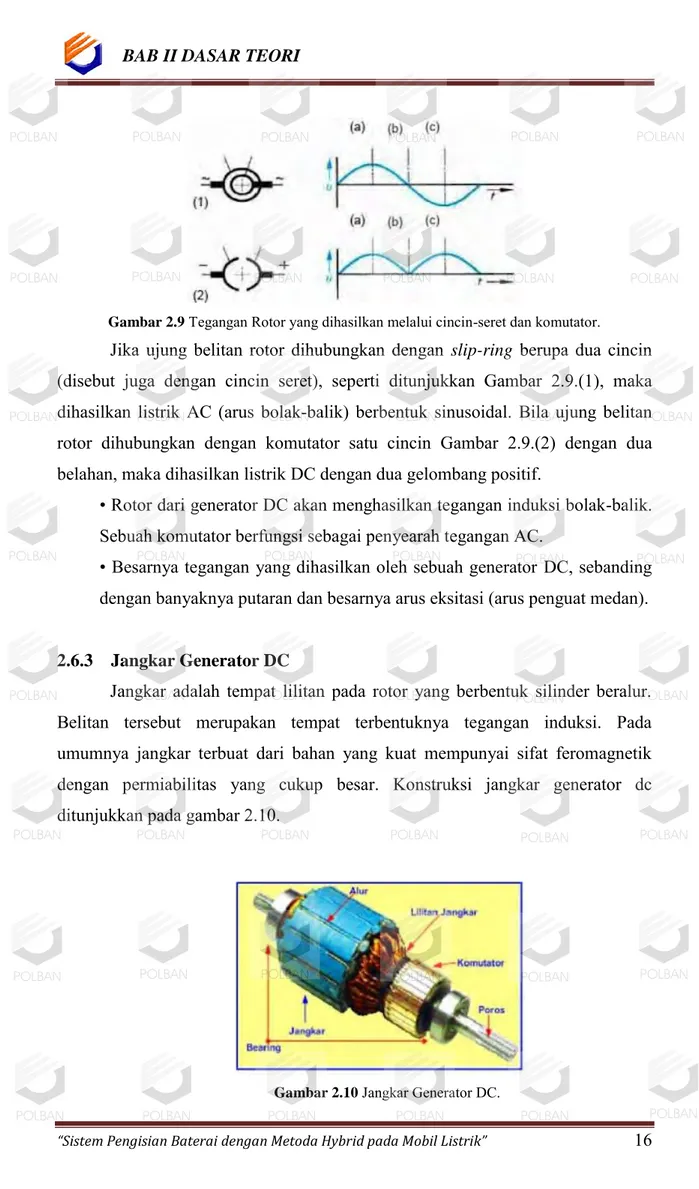
Proses pembangkitan tegangan tegangan induksi tersebut dapat dilihat pada Gambar 2.8 dan Gambar 2.9.
Gambar 2.8 Pembangkitan Tegangan Induksi.
Jika rotor diputar dalam pengaruh medan magnet, maka akan terjadi perpotongan medan magnet oleh lilitan kawat pada rotor. Hal ini akan menimbulkan tegangan induksi. Tegangan induksi terbesar terjadi saat rotor menempati posisi seperti Gambar 2.8 (a) dan (c). Pada posisi ini terjadi perpotongan medan magnet secara maksimum oleh penghantar. Sedangkan posisi jangkar pada Gambar 2.8 (b), akan menghasilkan tegangan induksi nol. Hal ini karena tidak adanya perpotongan medan magnet dengan penghantar pada jangkar atau rotor. Daerah medan ini disebut daerah netral.
Gambar 2.9 Tegangan Rotor yang dihasilkan melalui cincin-seret dan komutator.
Jika ujung belitan rotor dihubungkan dengan slip-ring berupa dua cincin (disebut juga dengan cincin seret), seperti ditunjukkan Gambar 2.9.(1), maka dihasilkan listrik AC (arus bolak-balik) berbentuk sinusoidal. Bila ujung belitan rotor dihubungkan dengan komutator satu cincin Gambar 2.9.(2) dengan dua belahan, maka dihasilkan listrik DC dengan dua gelombang positif.
• Rotor dari generator DC akan menghasilkan tegangan induksi bolak-balik. Sebuah komutator berfungsi sebagai penyearah tegangan AC.
• Besarnya tegangan yang dihasilkan oleh sebuah generator DC, sebanding dengan banyaknya putaran dan besarnya arus eksitasi (arus penguat medan).
2.6.3 Jangkar Generator DC
Jangkar adalah tempat lilitan pada rotor yang berbentuk silinder beralur. Belitan tersebut merupakan tempat terbentuknya tegangan induksi. Pada umumnya jangkar terbuat dari bahan yang kuat mempunyai sifat feromagnetik dengan permiabilitas yang cukup besar. Konstruksi jangkar generator dc ditunjukkan pada gambar 2.10.
Gambar 2.10 Jangkar Generator DC.
Permiabilitas yang besar diperlukan agar lilitan jangkar terletak pada derah yang induksi magnetnya besar, sehingga tegangan induksi yang ditimbulkan juga besar. Belitan jangkar terdiri dari beberapa kumparan yang dipasang di dalam alur jangkar. Tiap-tiap kumparan terdiri dari lilitan kawat atau lilitan batang.
2.6.4 Reaksi Jangkar
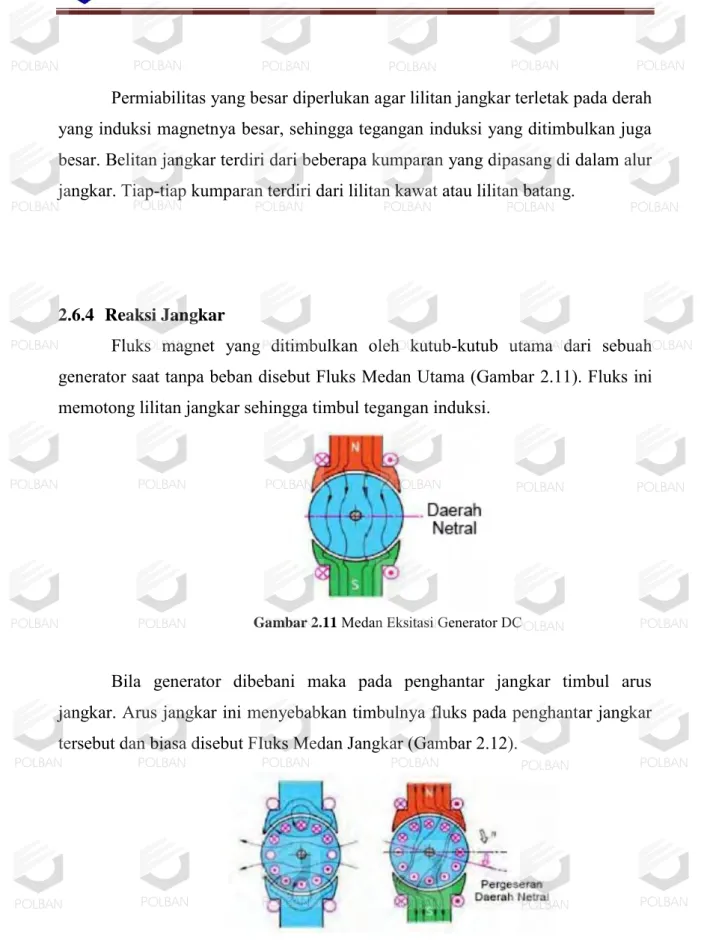
Fluks magnet yang ditimbulkan oleh kutub-kutub utama dari sebuah generator saat tanpa beban disebut Fluks Medan Utama (Gambar 2.11). Fluks ini memotong lilitan jangkar sehingga timbul tegangan induksi.
Gambar 2.11 Medan Eksitasi Generator DC
Bila generator dibebani maka pada penghantar jangkar timbul arus jangkar. Arus jangkar ini menyebabkan timbulnya fluks pada penghantar jangkar tersebut dan biasa disebut FIuks Medan Jangkar (Gambar 2.12).
Gambar 2.12 Medan Jangkar dari Generator DC (a) dan Reaksi Jangkar (b).
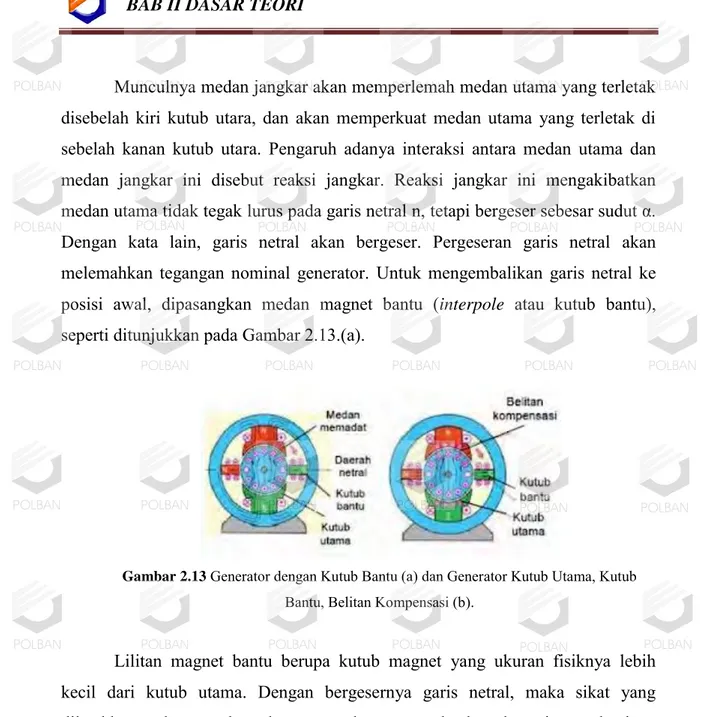
Munculnya medan jangkar akan memperlemah medan utama yang terletak disebelah kiri kutub utara, dan akan memperkuat medan utama yang terletak di sebelah kanan kutub utara. Pengaruh adanya interaksi antara medan utama dan medan jangkar ini disebut reaksi jangkar. Reaksi jangkar ini mengakibatkan medan utama tidak tegak lurus pada garis netral n, tetapi bergeser sebesar sudut α. Dengan kata lain, garis netral akan bergeser. Pergeseran garis netral akan melemahkan tegangan nominal generator. Untuk mengembalikan garis netral ke posisi awal, dipasangkan medan magnet bantu (interpole atau kutub bantu), seperti ditunjukkan pada Gambar 2.13.(a).
Gambar 2.13 Generator dengan Kutub Bantu (a) dan Generator Kutub Utama, Kutub Bantu, Belitan Kompensasi (b).
Lilitan magnet bantu berupa kutub magnet yang ukuran fisiknya lebih kecil dari kutub utama. Dengan bergesernya garis netral, maka sikat yang diletakkan pada permukaan komutator dan tepat terletak pada garis netral n juga akan bergeser. Jika sikat dipertahankan pada posisi semula (garis netral), maka akan timbul percikan bunga api, dan ini sangat berpotensi menimbulkan kebakaran atau bahaya lainnya. Oleh karena itu, sikat juga harus digeser sesuai dengan pergeseran garis netral. Bila sikat tidak digeser maka komutasi akan jelek, sebab sikat terhubung dengan penghantar yang mengandung tegangan. Reaksi jangkar ini dapat juga diatasi dengan kompensasi yang dipasangkan pada kaki kutub utama baik pada lilitan kutub utara maupun kutub selatan, seperti ditunjukkan pada Gambar 2.13 (a) dan (b), generator dengan komutator dan lilitan kompensasinya.
2.7 Penyearah
Penyearah atau Rectifier adalah rangkaian elektronika yang berfungsi menyearahkan gelombang arus listrik. Arus listrik yang semula berupa arus bolak-balik (AC) jika dilewatkan rangkaian Penyearah akan berubah menjadi arus searah (DC). Komponen utama dalam sebuah rangkaian penyearah adalah dioda yang dikonfigurasikan secara forward bias.
Pada dasarnya konsep penyearah gelombang dibagi dalam 2 jenis yaitu penyearah setengah gelombang dan penyearah gelombang penuh.
2.7.1 Penyearah Setengah Gelombang
Gambar 2.14 Rangkaian Penyearah Setengah Gelombang
Penyearah setengah gelombang (half wave rectifier) (Gambar 2.14) hanya menggunakan 1 buah dioda sebagai komponen utama dalam menyearahkan gelombang AC. Prinsip kerja dari penyearah setengah gelombang ini adalah mengambil sisi sinyal positif dari gelombang AC dari transformator. Pada saat transformator memberikan keluaran sisi positif dari gelombang AC maka dioda dalam keadaan forward bias sehingga sisi positif dari gelombang AC tersebut dilewatkan dan pada saat transformator memberikan sinyal sisi negatif gelombang AC maka dioda dalam posisi reverse bias, sehingga sinyal sisi negatif tegangan AC tersebut ditahan atau tidak dilewatkan seperti terlihat pada Gambar 2.15 sinyal keluaran penyearah setengah gelombang.
Gambar 2.15 Sinyal Keluaran Penyearah Setengah Gelombang
2.7.2 Penyearah Gelombang Penuh
Penyearah gelombang penuh dapat dibuat dengan 2 macam yaitu, menggunakan 4 dioda dan 2 dioda. Untuk membuat penyearah gelombang penuh dengan 4 dioda menggunakan transformator non-CT seperti terlihat pada Gambar 2.16 berikut :
Gambar 2.16 Rangkaian Penyearah 4 dioda
Prinsip kerja dari penyearah gelombang penuh dengan 4 dioda diatas dimulai pada saat keluaran transformator memberikan tegangan sisi positif, maka D1, D4 pada awal posisi forward bias dan D2, D3 pada posisi reverse bias sehingga level tegangan sisi puncak positif tersebut akan dilewatkan melalui D1 ke D4. Kemudian pada saat keluaran transformator memberikan level tegangan sisi puncak negatif maka D2, D4 pada posisi forward bias dan D1, D2 pada posisi reverse bias sehingga level tegangan sisi negatif tersebut dialirkan melalui D2, D4. Untuk lebih jelasnya dapat dilihat pada Gambar 2.17
Gambar 2.17 Sinyal Keluaran Penyearah Gelombang Penuh 4 dioda
Penyearah gelombang dengan 2 dioda menggunakan transformator dengan CT (Center Tap). Rangkaian penyearah gelombang penuh dengan 2 dioda dapat dilihat pada Gambar 2.18
Gambar 2.18 Rangkaian Penyearah 2 dioda
Prinsip kerja rangkaian penyearah gelombang penuh dengan 2 dioda ini dapat bekerja menggunakan transformator CT. Transformator CT dapat memberikan tegangan keluaran AC pada kedua terminal keluaran sekunder terhadap terminal CT dengan level tegangan yang berbeda fasa 180o. Pada saat terminal keluaran transformator pada D1 memberikan sinyal puncak positif maka terminal keluaran pada D2 memberikan sinyal puncak negatif, pada kondisi ini D1 pada posisi forward dan D2 pada posisi reverse. Sehingga sisi puncak positif dilewatkan melalui D1. Kemudian pada saat terminal keluaran transformator pada D1 memberikan sinyal puncak negatif maka terminal keluaran terminal keluaran pada D2 memberikan sinyal puncak positif. Pada kondisi ini D1 posisi reverse dan D2 pada posisi forward. Sehingga sinyal puncak positif dilewatkan melalui D2. Untuk lebih jelasnya dpat dilihat pada gambar keluaran penyearah gelombang
Gambar 2.19 Sinyal Keluaran Penyearah Gelombang Penuh 2 Dioda
2.8 Pengatur Tegangan
Pengatur tegangan (voltage regulator) berfungsi menyediakan suatu tegangan keluaran dc tetap yang tidak dipengaruhi oleh perubahan tegangan masukan, arus beban keluaran, dan suhu. Pengatur tegangan adalah salah satu bagian dari rangkaian catu daya DC. Dimana tegangan masukannya berasal dari tegangan keluaran filter, setelah melalui proses penyearahan tegangan AC menjadi DC.
Pengatur tegangan dikelompokkan dalam dua kategori, pengatur linier dan switching regulator. yang termasuk dalam kategori pengatur linier, dua jenis yang umum adalah pengatur tegangan seri (Series Regulator) dan pengatur tegangan parallel (Shunt Regualtor). Dua jenis pengatur di atas dapat diperoleh untuk keluaran tegangan positif maupun negatif. Sedangkan untuk switching regulator terdapat tiga jenis konfiguarsi yaitu, step-up, step-down dan inverting.
Dua kategori dasar pengaturan tegangan adalah pengaturan garis (Line Regulation) dan pengaturan beban (Load Regulation). Pengaturan garis adalah kemampuan pengatur tegangan (voltage regulator) untuk tetap memepertahankan tegangan keluaran ketika tegangan masukan berubah-ubah. Pengaturan Beban kemampuan untuk tetap mempertahankan tegangan keluaran ketika beban bervariasi.
2.8.1 Line Regulation
Ketika tegangan masukan DC berubah-ubah, pengatur tegangan (voltage regulator) harus mempertahankan tegangan keluaran, seperti digambarkan pada gambar 2.20.
Gambar 2.20 Line Regulation
Pengaturan Garis dapat digambarkan sebagai persentase perubahan tegangan keluaran terhadap perubahan yang terjadi pada tegangan masukan. Pada umumnya dinyatakan dalam % / V. Sebagai contoh, sebuah regulator tegangan mempunyai pengaturan garis 0,05%/V berarti bahwa tegangan keluaran ber;ubah 0,05 persen ketika tegangan masukan meningkat atau berkurang dengan satu volt.
2.8.2 Load Regulation
Ketika arus yang mengalir melalui beban berubah akibat perubahan beban, regulator tegangan haruslah tetap mempertahankan tegangan keluaran pada beban agar tidak berubah (tetap).
Pengaturan beban dapat dinyatakan sebagai persentase perubahan tegangan keluaran untuk setiap perubahan arus beban. Pengaturan beban juga dapat dinyatakan sebagai persentase perubahan dari tegangan keluaran tanpa beban (TB) ke tegangan keluaran dengan beban penuh (BP). Seperti yang terlihat pada Gambar 2.21
Gambar 2.21 Load regulation
Pengaturan beban dapat juga dinyatakan sebagai persentasi perubahan
contoh, regulator tegangan mempunyai Load Regulation 0,01% / mA, berarti bahwa tegangan keluaran berubah 0,01 persen ketika arus beban meningkat atau berkurang 1 mA.
2.8.3 Dasar Pengatur Tegangan Seri
Dasar pengatur tegangan ada dua, yang pertama pengatur linier (linear regulators) dan yang kedua adalah pengatur tersaklar (switching regulators). Keduanya tersedia dalam bentuk IC. Ada dua jenis pengatur linier. pertama adalah pengatur tegangan seri dan yang kedua adalah pengatur tegangan parallel.
Gambaran sederhana dari pengatur tegangan seri ditunjukkan pada Gambar 2.22 diagram blok berikut ini.
Series Regulator VIN VOUT Control Element Error Detector Sample Circuit Reference Voltage vin VOUT (a) (b)
Gambar 2.22 Diagram Blok Pengatur Tegangan Seri
Rangkaian dasar pengatur tegangan seri ditunjukkan pada Gambar 2.22 Sedangkan cara kerjanya ditunjukkan pada gambar 2.23. Resistor pembagi tegangan dibentuk oleh R2 dan R3 yang bertindak sebagai sensor bila terjadi perubahan tegangan keluaran. Jika tegangan keluaran turun yang disebabkan oleh penurunan tegangan masukan VIN atau bertambahnya arus beban IL, maka tegangan pada masukan inverting (-) dari Op-Amp (sebagai error detector) juga akan turun yang disebabkan oleh penurunan tegangan pada resistor pembagi tegangan. Diode zener yang digunakan sebagai masukan pada masukan Non-inverting (+) dari Op-Amp, juga bertindak sebagai tegangan acuan atau VREF, yang nilainya tetap. Selisih tegangan yang ada pada kedua masukan Op-Amp akan diperkuat, sehingga keluaran Op-Amp pun akan bertambah, demikian pula
tegangan pada Basis dari transistor Q1, akibatnya tegangan pada Emittor Q1 atau VOUT juga naik sampai tegangan pada masukan inverting (-) sama dengan tegangan VREF. Tindakan ini akan menghindari penurunan tegangan pada keluaran dan mejaga tetap kontan. Transistor Q1 adalah power transistor yang diberi penyerap panas (heatsink) karena transistor ini harus melalukan semua arus yang mengalir ke beban.
Gambar 2.23 Rangkaian Dasar Pengatur Tegangan Seri
2.8.4 Dasar Pengatur Tegangan Paralel
Pengatur tegangan parallel menempatkan transistor, sebagai elemen kontrol, parallel terhadap beban. Gambaran sederhana dari pengatur tegangan parallel ditunjukkan pada Gambar 2.24 berikut ini.
Gambar 2.24 Diagram Blok Pengatur Tegangan Paralel
Rangkaian dasar pengatur tegangan parallel ditunjukkan pada Gambar 2.25. Operasi rangkaian ini mirip dengan pengatur tegangan seri. Ketika tegangan keluaran turun yang dapat disebabkan oleh perubahan tegangan VIN atau arus beban. Penurunan ini disensor oleh R3 dan R4 dan dikirim ke masukan Non-inverting (+) dari Op-Amp. Selisih tegangan ini akan mengurangi tegangan keluaran Op-Amp, akibatnya mengurangi dorongan ke transistor Q1, sehingga arus kolektor akan berkurang dan secara efektif menaikkan nilai resistansi
.Dengan tindakan ini VOUT akan dipertahankan tetap konstan. Hal yang sama jika tegangan keluaran naik.
2.8.5 Pengatur Tegangan IC 78 XX
IC 78XX adalah regulator tegangan positif dengan tiga terminal, masing-masing input, Ground dan output. IC 78XX tersedia untuk beberapa nilai tegangan keluaran seperti terlihat pada datasheet Lampiran C.
Meskipun semula dirancang untuk regulator tegangan tetap, namun regulator ini dapat dikembangkan untuk tegangan dan arus yang dapat diatur. Rangkaian dasar 78XX ditunjukkan Gambar 2.25, untuk tegangan dan arus keluaran sesuai nilai nominalnya.
Gambar 2.25 Rangkaian Dasar Regulator 78XX
C1 diperlukan jika regulator jauh dari Kapasitor Filter pencatu daya sedangkan C2 diperlukan untuk memperbaiki tanggapan kilasan dan penindasan kerut (trancient response).
Dalam penerapannya, tegangan masukan VIN harus lebih besar dari tegangan keluaran (lihat datasheet) jika kurang maka regulator tidak berfungsi tetapi bila melebihi nilai VIN maksimumnya dapat merusak regulator.
2.9 Baterai
Baterai atau akumulator adalah sebuah sel listrik dimana didalamnya berlangsung proses elektrokimia yang reversibel (dapat berbalikan) dengan efisiensinya yang tinggi. Yang dimaksud dengan proses elektrokimia reversibel, adalah didalam baterai dapat berlangsung proses pengubahan kimia menjadi tenaga listrik (proses pengosongan), dan sebaliknya dari tenaga listrik menjadi tenaga kimia (proses pengisian).
Baterai tersedia dalam berbagai jenis dan ukuran. Diantaranya adalah baterai
lead-acid.
2.9.1 Baterai lead-acid
Baterai lead acid dapat dikelompokkan menjadi Liquid Vented dan Sealed ( VRLA – Valve Regulated Lead Acid).
a. Liquid vented (aki dengan katup pengisian ulang cairan)
Liquid vented adalah yang sering digunakan pada mobil, yang terbuat dari
lempengan positif dan negatif dari paduan timah yang ditempatkan dalam larutan elektrolit dan air asam sulfuric. Baterai lead-acid yang terdiri dari 6 individu 2-sel volt. Baterai ini dirancang untuk memberikan arus listrik yang besar hanya beberapa saat, kemudian harus dicharging. (contoh pada saat starter mobil). Pada saat mendekati full charge, hidrogen dihasilkan dan menguap dari baterai, mengakibatkan air baterai jenis ini berkurang. Untuk maintenance, baterai jenis ini harus dimonitor.
b. Baterai sealed lead-acid (VRLA)
Tidak seperti baterai liquid vented, baterai ini tidak memiliki caps/ katup, tidak ada akses ke elektrolit dan total sealed. Dengan demikian baterai jenis ini tidak memerlukan maintenance. Baterai Deep Cycle, adalah baterai yang cocok untuk mobil listrik, karena dapat discharge sejumlah arus listrik secara konstan dalam waktu yang lama. Umumnya baterai deep cycle dapat discharge sampai dengan 80% kapasitas baterai. Dengan perencanaan kapasitas dan maintenance yang baik, baterai jenis ini dapat bertahan selama kurang lebih 10 tahun.
2.9.2 Prinsip Kerja Baterai
Gambar 2.26 Proses Pengosongan (Discharge)
a. Proses discharge
Pada sel berlangsung menurut skema Gambar 2.26. Bila sel dihubungkan dengan beban maka, elektron mengalir dari anoda melalui beban ke katoda, kemudian ion-ion negatif mengalir ke anoda dan ion-ion positif mengalir ke katoda.
Gambar 2.27 Proses Pengisian (Charge)
b. Proses pengisian
Menurut skema Gambar 2.27. dibawah ini adalah bila sel dihubungkan dengan power supply maka elektroda positif menjadi anoda dan elektroda negatif menjadi katoda dan proses kimia yang terjadi adalah sebagai berikut:
1). Aliran elektron menjadi terbalik, mengalir dari anoda melalui power suplai ke katoda.
2). Ion-ion negatif rnengalir dari katoda ke anoda.
3). Ion-ion positif mengalir dari anoda ke katoda.
Jadi reaksi kimia pada saat pengisian (charging) adalah kebalikan dari saat pengosongan (discharging). Untuk mengetahui waktu dalam proses pengisian accumulator, dapat menggunakan perhitungan pada persamaan sebagai berikut :
• Lama pengisian Arus:
...(2.1) keterangan :
Ta = Lamanya pengisian arus (jam).
Ah = Besarnya kapasitet accumulator (Ampere hours). A = Besarnya arus pengisian ke accumulator (Ampere).
• Lama pengisian Daya:
... (2.2) keterangan :
Td = Lamanya pengisian Daya (jam).
Daya Ah = Besarnya daya yang didapat dari perkalian Ah dengan besar tegangan accumulator (Watt hours).
Daya A = Besarnya daya yang didapat dari perkalian A dengan besar tegangan accumulator (Watt).
2.9.3 Tingkat Efisiensi
Dalam perbedaan tingkat efisiensi baterai, kita mulai dengan baterai muatan penuh yang dialirkan dan diisi ulang.
1. Tingkat efisiensi Ah
Tingkat efisiensi Ah diberikan oleh rumus sebagai berikut :
keterangan :
IE = arus pengaliran muatan (A) IL = arus pengisian muatan (A)
Ini berarti tingkat efisiensi Ah berhubungan dengan sejumlah arus ditarik dari baterai selama pengaliran muatan ke sejumlah arus yang harus dimasukkan kedalam baterai untuk membawanya kembali ke tempat semula.
2. Tingkat efisiensi daya
Berbeda dengan efisiensi Ah, tingkat efisiensi daya tergantung variasi voltase selama pengisian dan pengaliran muatan :
η = x 100% ...(2.4) keterangan : PE = Daya pengaliran (W) PL = Daya pengisian (W)