27 BAB 4
HASIL DAN BAHASAN 4.1. Gangguan noise pada sensor
4.1.1.Filter
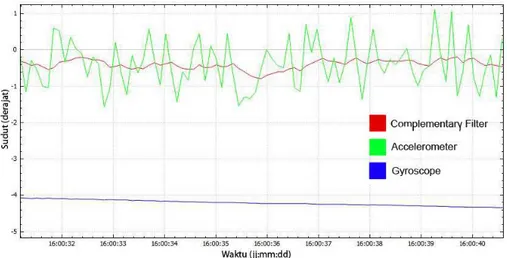
Gambar 4.1. Perbandingan sudut diam
Gambar 4.1 menunjukan potongan data dimana sistem seharusnya dalam kondisi datar, tetapi ternyata ada kemiringan 0,5 derajat pada bidang di mana sistem diletakan. Pada gambar terlihat nilai sudut dari accelerometer sangat ber-noise meski telah diberikan low-pass filter, sedangkan nilai sudut dari gyroscope terlihat sangat baik, tetapi seiring dengan berjalannya waktu terjadi pergeseran pada nilainya. Nilai pada complimentary filter terlihat jauh lebih baik dari kedua nilai yang lain karena nilainya paling mendekati dengan keadaan sebenarnya.
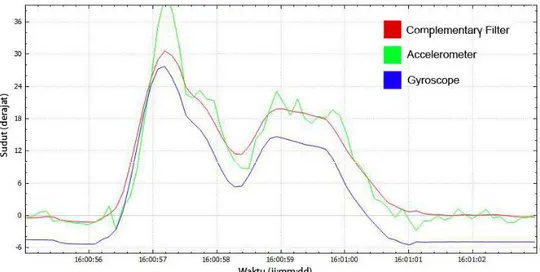
Gambar 4.2. Perbandingan sudut bergerak
Pada grafik ini sangat jelas terlihat keunggulan menggunakan complemenary filter dari pada menggunakan satu data sensor. Dan juga terlihat akibat dari low-pass filter pada accelerometer, yang membuat data accelerometer agat terlambat merespon perubahan sudut yang mendadak. Sedangkan untuk nilai dari gyroscope tetap terjadi pergeseran, meski sempat mendekati nilai yang benar saat ada pertambahan sudut. Pada percobaan ini tidak dibandingan nilai dengan kalman filter karena sebelumnya telah dibuktikan bahwa nilai dari complementary filter cukup baik untuk menggantikan kalman filter dalam penggunaannya untuk mencari sudut dari accelerometer dan gyroscope, nilai accelerometer yang digunakan di sini telah sebelumnya dilakukan low-pass filter karena nilainya terlalu acak bila tidak, sedangkan untuk gyroscope, karena noise yang tidak banyak berubah, maka tidak digunakan low-pass filter.
4.1.2.Kesalahan
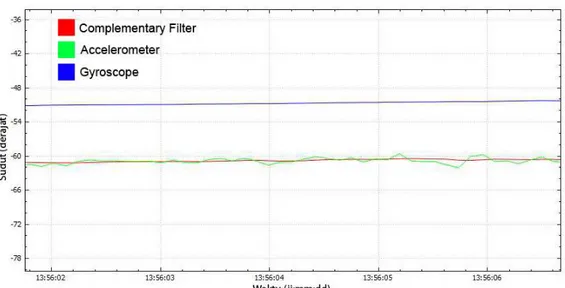
Untuk menghitung tingkat akurasi dari complementary filter sistem dimiringkan sejauh 60 derajat, dan dibandingkan dengan hasil perhitungan pada complementary filter.
Gambar 4.3. Perbandingan kesalahan sudut
Nilai yang didapat adalah 61 derajat atau terjadi kesalah sebesar 1 derajat --- (Persamaan 4-1)
Nilai ini terbilang sangat kecil, dan dapat diterima jika mengingat, hasil dari accelerometer yang naik turun penuh noise dengan simpangan sampai 2 derajat pada kondisi diam. Dan gyroscope yang mengalami pergeseran nilai yang sangat besar hampir 0.2 derajat per detik, yang tentu saja sangat mengkhawatirkan jika digunakan untuk penerbangan lebih dari 1 menit. Dari
percobaan ini terbukti bahwa complementary filter cukup baik dalam menghasilkan nilai sudut dari sensor yang ber-noise
4.2. Penyeimbangan sistem 4.2.1.Nilai Pengaturan
Setelah mengetahui bahwa referensi sudut yang digunakan cukup memuaskan maka berikutnya yang perlu dites adalah apakah sistem dapat melakukan perhitungan dan menghasilkan nilai pengaturan akan kemiringan sistem yang terjadi.
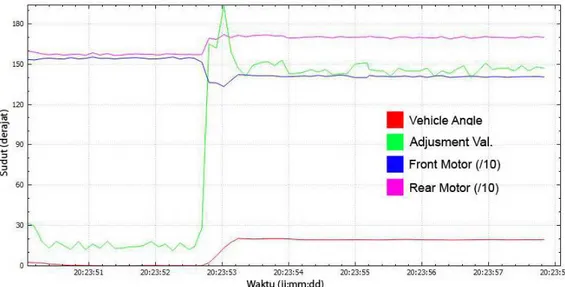
Gambar 4.4. Nilai Pengaturan perubahan drastis
Terlihat pada gambar bila ada perubahan sedikit saja pada kemiringan sistem, sistem langsung dapat meresponnya dengan baik, dalam hal ini terlihat saat sistem mendongak hampir 30 derajat, dihasilkan nilai pengaturan sekitar 150, dengan motor depan dikurangi kecepatannya, dan motor belakang dipercepat, hal ini dilakukan untuk memberikan daya ungkit balik agar sistem dapat stabil. Nilai ini terus dipertahankan oleh sistem selama adanya perbedaan
sudut input dengan sudut aktual. Terlihat pada awal saat sudut aktual menunjukan 0 derajat, terdapat perbedaan kecepatan hampir 50 dari kedua motor atau nilai pengaturan sebesar 25 Hal ini terjadi kerena input dari remote control pada saat itu tidak menunjukan sekarang nilai 0 tetapi nilai yang berbeda. Hal ini di mungkinkan karena remote control tidak selalu mengeluarkan nilai yang pas. Tetapi dapat dihilangkan dengan trimming remote control atau menggeser nilai 0 pada remote control untuk mengatasi kekurangan remote control tersebut
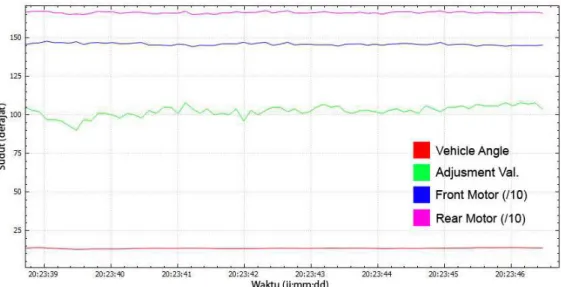
Gambar 4.5. Nilai pengaturan tetap
Bisa dilihat sistem sangat baik merespon adanya perubahan kecil pada sudut, pada 20:23:39.5 terlihat ada perubahan sudut sedikit lebih menurun, dan sistem langsung meresponnya dengan pengaturan sekitar 5. Ini menunjukan bahwa sistem sangat baik merespon perubahan sudut aktual terhadap sudut yang dinginkan, seperti pada perancangan sisitem dijelaskan bahwa proses ini terus berulang dengan frekuensi 100Hz, kecepatan ini diambil untuk mengatasi masalah bahkan sebelum masalah itu terjadi, sebelum gangguan itu membentuk
sudut yang besar sistem akan meresponnya. Dalam keadaan ideal dengan kecepatan motor yang pas sistem dapat diam di tengah udara tanpa bergerak.
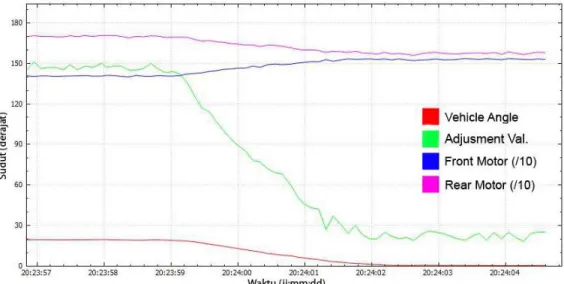
Gambar 4.6. Nilai pengaturan dengan perubahan perlahan
Pada Gambar 4.6 terlihat perubahan sudut terjadi perlahan, sistem juga meresponnya perlahan, respon ini ditujukan agar bila nanti ada gangguan yang berkurang secara perlahan, sistem dapat meresponnya dengan halus, agar tidak terjadi lonjakan. Dapat dilihat di akhir, pada saat nilai sudut 0 derajat, kembali terjadi perbedaan karena masalah remote control yang telah dibahas sebelumnya. 4.2.2.Waktu
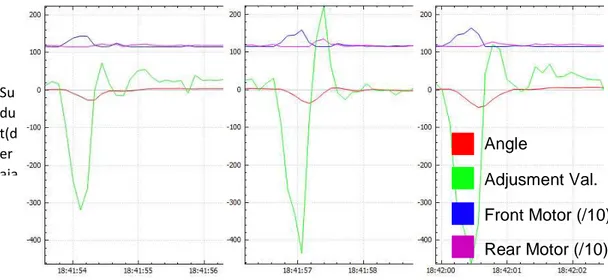
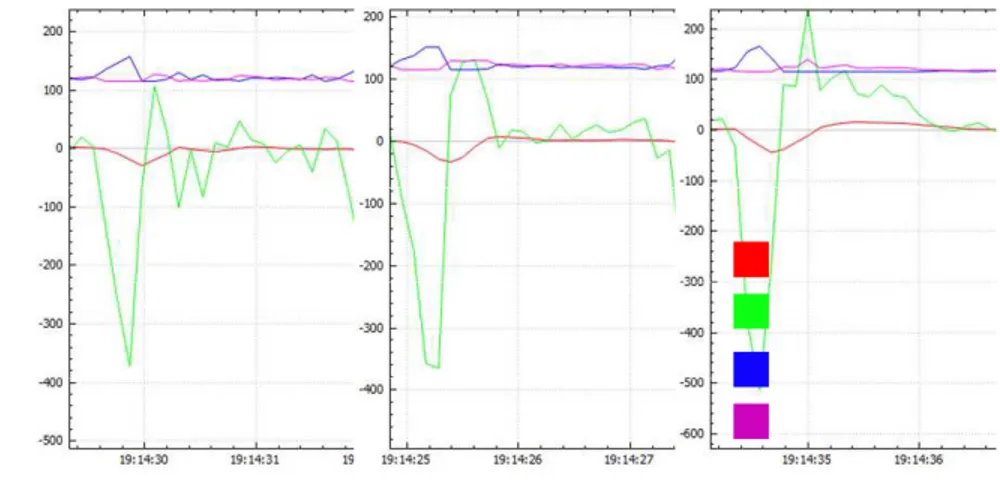
Gambar 4.7. Tiga percobaan dengan set pertama pada pitch
Gambar 4.7 adalah hasil percobaan pertama waktu penyeimbangan pada pitch dengan nilai PID yang pertama digunakan dengan nilai
Accel P : 4 I : 0 D : 0 Gyro P : 100 I : 0 D : -300
Dengan beberapa besar simpangan yang berbeda dapat diamati pada gambar pertama dengan simpangan 26,8°, membutuhkan 1 detik untuk kembali seimbang, gambar kedua dengan simpangan 36,16° juga membutuhkan waktu 1 detik, gambar ketiga dengan simpangan 46,67° juga membutuhkan waktu yang sama, hal ini menunjukan sistem cukup konsisten dalam menyeimbangkan keadaan, tetapi waktu ini diperpanjang karena adanya osilasi di akhir penyeimbangan, yang membuat settling time menjadi satu detik, bila dilihat, rise time dari ketiga gambar secara berurutan adalah 0,5 detik 0,5 detik, dan 0,75 detik, maka dari itu untuk percobaan selanjutnya ditambahkan nilai D untuk Su du t(d er aja Waktu(jj:mm:dd) Adjusment Val. Angle Rear Motor (/10) Front Motor (/10)
meredam osilasi ini dan mempersingkat waktu. Tetapi secara tujuan sistem sudah dapat menyeimbangkan diri dibawah 10 detik.
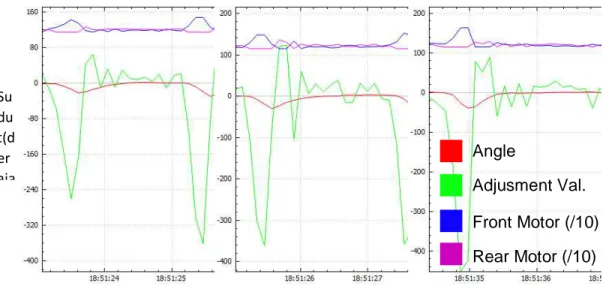
Gambar 4.8. Tiga percobaan dengan set kedua pada pitch
Gambar 4.8 adalah hasil percobaan kedua waktu penyeimbangan pada pitch dengan nilai PID
Accel P : 4 I : 0 D : 0 Gyro P : 100 I : 0 D : -350
Gambar pertama dengan simpangan sebesar 22,09° seimbang dalam waktu 0,75 detik gambar kedua dengan simpangan sebesar 30,02° seimbang dalam waktu 0,75 detik gambar ketiga dengan simpangan sebesar 39,58° seimbang dalam waktu 0,5 detik lebih. Terjadi peningkatan yang cukup siginifikan pada settling time dikarenakan hilangnya osilasi, tetapi bila dilihat dari grafik terlihat bahwa sistem cukup landai, karena adanya redaman dari Su du t(d er aja Waktu(jj:mm:dd) Adjusment Val. Angle Rear Motor (/10) Front Motor (/10)
penambahan nilai D. bagian ini dapat dikembangkan lebih lanjut dengan penambahan nilai P agar sistem dapat merespon lebih cepat. Karena PID bagian dalam (dengan set nilai gyroscope) dirasa sudah cukup baik, maka berikutnya yang akan dicoba adalah menambahkan nilai P pada PID bagian luar (dengan set nilai accelerometer), agar sistem lebih responsif dalam menanggapi perubahan keadaan.
Gambar 4.9. Tiga percobaan dengan set ketiga pada pitch
Gambar 4.9 adalah hasil percobaan ketiga waktu penyeimbangan pada pitch dengan nilai PID
Accel P : 4.4 I : 0 D : 0 Gyro P : 100 I : 0 D : -350
Gambar 4.9 menunjukan sifat P yang akan memotong rise time dan dapat membuat osilasi, gambar pertama dengan simpangan 29,48° dapat seimbang dalam waktu 1,5 detik, gambar kedua dengan simpangan 33,54° juga seimbang dalam 1,5 detik, gambar ketiga dengan simpangan 44,38° juga seimbang di
sekitar 1,5 detik, tetapi rise time ketiga berkurang menjadi secara berturut-turut 0,25 detik, 0,5 detik, dan 0,5 detik, yang membuat sistem lebih cepat kembali ke posisi semula tetapi mengalami osilasi. Karena nilai osilasi yang terlalu besar maka penulis memutuskan untuk mengambil nilai pada percobaan kedua sebagai nilai PID yang digunakan. Dan kembali dilakukan percobaan, untuk mengetahui respon dari sistem dengan lebih baik.
Gambar 4.10. Pengulangan percobaan dengan set ketiga pada pitch
Pada percobaan ini sistem dicoba untuk menyeimbangkan kembali kemiringan sebesar 44,07° yang diselesaikan dalam 0,9 detik. Lebih cepat dari simulasi yang dibuat oleh Hugo Meric yakni 2 detik (Meric, 2009) atau pun dari hasil pengaplikasian LQG oleh Jorge Miguel Brito Domingues, yakni 5 detik. (Domingues, 2009)
Ketiga percobaan sebelumnya menggunakan data kecepatan motor dan data nilai pengaturan, hal ini ditujukan untuk mengetahui apakah sistem bekerja dengan baik, dan untuk memonitor kecepatan motor agar tidak terlalu tinggi demi
Su du t(d er aja t) Waktu(detik) Pitch Roll
keselamatan dalam penujian, setelah mengetahui sistem bekerja dengan baik, penulis melakukan percobaan kembali untuk memperjelas data yang sebelumnya saling tindih dan kurang besar. Untuk percobaan berikutnya, penulis akan mencoba untuk melakukan penyesuaian PID untuk roll yang mana akan kembali dilakukan pertama dengan grafik yang memiliki nilai pengaturan dan kecepatan motor dan jika sistem sudah dirasa cukup stabil maka penggunaan grafik dengan hanya sudut akan digunakan untuk melihat nilai dengan lebih baik.
4.2.2.2 Roll
Gambar 4.11. Tiga percobaan dengan set pertama pada roll
Gambar 4.11 adalah hasil percobaan pertama waktu penyeimbangan pada roll dengan nilai PID yang pertama digunakan dengan nilai
Accel P : 4 I : 0 D : 0 Gyro P : 100 I : 0 D : -300
Kembali terlihat bahwa nilai awal ini sudah cukup stabil, tetapi seperti terlihat di semua Gambar 4.11 bahwa terjadi osilasi setelah sistem stabil. Gambar Adjustment Val. Angle Rear Motor (/10) Front Motor (/10) Su du t(d er aja Waktu(jj:mm:dd)
pertama dengan simpangan 15,86° membutuhkan waktu antara 0,5-0,75 detik untuk dapat menyeimbangkan diri, sedangkan gambar kedua dengan simpangan 17,09° membutuhkan waktu antara 0,75 detik, dan gambar ketiga dengan simpangan 24,76° membutuhkan, waktu sekitar 0,75 detik. Percobaan pertama ini menggunakan sudut yang kecil karena penulis belum yakin sistem benar-benar stabil. Karena masih ada osilasi maka penulis menambahkan nilai D pada PID bagian dalam atau PIDGyro dengan nilai 350 mengacu pada percobaan sebelumnya yang menguji pitch dengan nilai ini, penulis mengharapkan dapat mencapai sistem yang baik dengan nilai yang sama
Gambar 4.12. Tiga percobaan dengan set kedua pada roll
Gambar 4.12 adalah hasil percobaan kedua waktu penyeimbangan pada roll dengan nilai PID
Accel P : 4 I : 0 D : 0 Gyro P : 100 I : 0 D : -350 Adjustment Val. Angle Rear Motor (/10) Front Motor (/10) Su du t(d er aja t)( m er Waktu(jj:mm:dd)
Kembali terlihat bahwa nilai awal ini sudah cukup stabil. Gambar pertama dengan simpangan 25,84° membutuhkan waktu kurang dari setengah detik untuk dapat menyeimbangkan diri, sedangakan gambar kedua dengan simpangan 28,77° membutuhkan waktu antara 0,5-0,75 detik, dan gambar ketiga dengan simpangan 35,46° membutuhkan, waktu sekitar 0,5 detik, sistem dirasa sudah cukup konsisten dalam menyeimbangkan dan karenanya nilai ini kemudian akan ditampilkan dengan grafik yang hanya memuat nilai sudut saja untuk analisa lebih lanjut
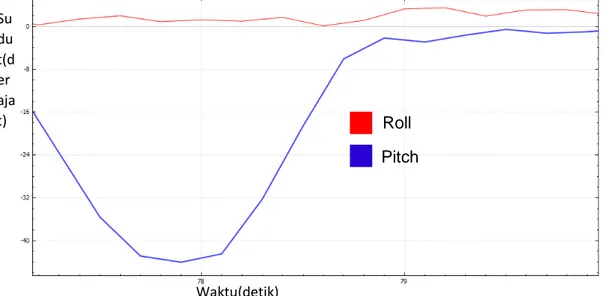
Gambar 4.13. Pengulangan percobaan dengan set kedua pada roll
Gambar 4.13 kembali sistem dites secara detail tetapi ada osilasi sebesar 1,5 derajat yang ternyata pada fisiknya tidak berpengaruh. Waktu penyetimbangan
Su du t(d er aja Waktu(s) Pitch Roll
sekitar 1 detik, sistem ini kembali lebih cepat dari simulasi Hugo Meric selama 2 detik (Meric, 2009).
Dengan hasil ini maka untuk roll dari sistem ini lebih cepat 50% dari simulasi Hugo Meric atau lebih cepat 1 detik. (Meric, 2009)
Dan untuk pitch dari sistem ini lebih cepat 50% atau 1 detik dari simulasi Hugo Meric, dan lebih cepat 80% atau 8 detik dari Jorge Miguel Brito Domingues. (Meric, 2009) (Domingues, 2009)
Gambar 4.14. Percobaan dengan PID saja
Gambar 4.14 adalah hasil percobaan waktu penyeimbangan pada roll dengan nilai PID
Gyro P : 100 I : 0 D : -350
Pada PID biasa, bukan menggunakan nested PID seperti sebelumnya terjadi perubahan yang sangat signifikan, sistem yang asalnya mengacu pada sudut dan pergerakan, sekarang hanya mengawasi pergerakan, hal ini membuat sistem tidak
Pitch Roll Su du t(d er aja Waktu(jj:mm:dd)
dapat merespon gangguan yang terus menerus, seperti perubahan sudut pada bagian pertama, sistem setelahnya hanya bisa menahan posisi miring tersebut. Hal itu terus berulang meski sistem sudah di kembalikan ke posisi awal, dan kemudian diberikan gangguan lain. Maka dari itu lebih baik menggunakan nested PID karena nilai yang di jadikan acuan ada dua, yakni nilai sudut itu sendiri dan nilai pergerakannya.
42
4.2.3. Kesalahan
Terlihat bahwa sistem membutuhkan waktu sekitar 1 detik untuk mengaktualkan respon yang diberikan oleh remote control, pada saat menaikan sudut terlihat bahwa sistem dapat merespon dengan baik, kesalahan mulai terlihat pada saat sistem diperintahkan untuk membentuk sudut negatif, hal ini dikarenakan motor 3 pada saat pengujian sebelumnya drivernya mengalami kerusakan, kemungkinan motor mengalami gangguan dan performanya tidak sama dengan yang lain, yang mengakibatkan terjadi perbedaan.
4.2.4. Dokumentasi hardware
Gambar 4.16. Tampak Atas
Gambar 4.18. Perspektif