TINJAUAN MENGENAI GPS DALAM SISTEM AIRBORNE LIDAR
Bagian pertama dari sistem LIDAR adalah Global Positioning System (GPS). Fungsi dari GPS adalah untuk menentukan posisi (X,Y,Z atau L,B,h) wahana terbang terhadap sistem referensi tertentu ketika melakukan survey LIDAR. Untuk mendapatkan posisi dengan ketelitian yang relatif tinggi (hingga level centimeter) penentuan posisi dengan GPS dilakukan secara diferesial dengan menggunakan data fase.
2.1 Global Positioning System
Global Positioning System (GPS) adalah sistem radio navigasi dan penentuan posisi menggunakan satelit. Nama formalnya adalah NAVSTAR GPS, singkatan dari Navigation Satellite Timing dan Ranging Global Positioning System. Sistem ini dapat digunakan oleh banyak orang sekaligus dalam segala cuaca. Sistem ini didisain untuk memberikan posisi dan kecepatan tiga dimensi yang teliti, dan juga informasi mengenai waktu, secara kontinu di seluruh dunia.
GPS terdiri atas 3 segmen utama, yaitu segmen angkasa (space segment) yang terdiri dari satelit-satelit GPS, segmen sistem kontrol (control-system segment) yang terdiri dari stasiun-stasiun pemonitor dan pengontrol satelit, dan segmen pemakai (user segment) yang terdiri dari pemakai GPS termasuk alat-alat penerima dan pengolah sinyal dan data GPS. Ilutrasi 2.1 berikut menggambarkan tiga segmen utama GPS.
Space Segment GPS Signal Download (L-band) Upload (S-band) User Segment Control Segment
Gambar 2.1 Tiga Segmen GPS [Abidin, 2007]
Konfigurasi standar dari satelit GPS terdiri dari 24 satelit yang menempati 6 bidang orbit yang bentuknya sangat mendekati lingkaran, dengan eksentisitas orbit umumnya lebih kecil dari 0,02. Keenam bidang orbit satelit GPS mempunyai spasi sudut yang sama antar sesamanya. Meskipun demikian setiap orbit ditempati oleh 4 satelit dengan interval antaranya yang tidak sama. Jarak antar satelit diatur sedemikian rupa untuk memaksimalkan probabilitas kenampakan setidaknya empat buah satelit yang bergeometri, baik dari setiap tempat di permukaan bumi pada setiap saat.
Orbit satelit GPS berinklinasi 55 derajat terhadap bidang ekuator dengan ketinggian rata-rata dari permukaan bumi sekitar 20.200 km. Satelit GPS bergerak dalam orbitnya dengan kecepatan kira-kira 3,87 km/ detik den mempunyai periode 11 jam dan 18 menit. Dengan adanya 24 satelit GPS yang mengangkasa tersebut, 4 sampai 10 satelit GPS akan selalu dapat diamati pada setiap waktu dari tempat manapun di permukaan bumi.
2.2 Data Pengamatan GPS
pembawa (carrier wave). Pada prinsipnya sinyal-sinyal GPS tersebut bertujuan untuk mengirimkan data tentang posisi satelit yang bersangkutan, jaraknya dari titik pengamat, serta informasi waktu. Sinyal GPS juga digunakan untuk menginformasikan kelaikgunaan satelit kepada pengamat, serta informasi-informasi pendukung lainnya seperti parameter untuk perhitungan koreksi jam satelit, parameter model ionosfer satu frekuensi, transformasi waktu GPS ke UTC, dan status konstelasi satelit.
Penentuan jarak dari satelit ke receiver GPS dapat dilakukan dengan dua cara, yaitu: jarak kode (pseudorange) dan jarak fase (phase) dari gelombang pembawa. Masing-masing cara tersebut mempunyai ketelitian yang berbeda.
2.2.1 Pseudorange
Pseudorange adalah jarak semu antara satelit dengan receiver. Dinamakan jarak semu karena jarak yang didapatkan dari data kode ini masih dipengaruhi oleh kesalahan waktu (selisih waktu antara jam satelit dengan jam receiver). Prinsip pengamatan jarak pseudorange ini adalah mengukur beda waktu antara sinyal yang datang dari satelit dengan sinyal yang dibangkitkan dalam receiver. Perbedaan waktu tersebut dikalikan dengan kecepatan cahaya pada ruang hampa sehingga diperoleh jarak antara satelit dan receiver.
Gambar 2.2 Prinsip Penentuan Jarak Pseudorange [Abidin, 2007]
Pada gambar 2.2 di atas terlihat bahwa terdapat ketidaksamaan antara kode yang datang dari satelit dengan kode yang dibangkitkan oleh receiver. Besarnya ketidaksamaan tersebut merupakan perbedaan waktu (t) antara sinyal yang datang dari satelit dengan sinyal yang dibangkitkan oleh receiver. Beda waktu tersebut merupakan waktu yang diperlukan oleh sinyal GPS untuk merambat dari satelit menuju receiver. Persamaan pengamatan matematik untuk pengamatan pseudorange (Abidin, 2007) adalah sebagai berikut : Δt = tr – ts = (tr (gps) – δr) – (ts(gps) – δs) (2.1) sehingga Δt = Δt(gps)+ Δδ (2.2) dengan Δt(gps) = tr (gps) - ts(gps) dan Δδ = δr – δs t (2.3) Di mana:
r = waktu dari jam receiver
KODE YANG DATANG DARI SATELIT REPLIKA KODE YANG DIBANGUN DI DALAM RECEIVER dt SATELIT RECEIVER
tr (gps) = waktu GPS untuk jam receiver
ts (gps) = waktu GPS untuk jam satelit
δr = bias waktu jam receiver terhadap waktu GPS
δs
= bias waktu jam satelit terhadap waktu GPS Δt = selisih waktu dari jam receiver dan jam satelit
Sehingga diperoleh persamaan jarak pseudorange sebagai berikut: R = c Δt = c Δt(gps)+ c Δδ = ρ + c Δδ
(2.4)
Di mana ρ merupakan jarak geometrik antara satelit dengan receiver.
Ada dua kode pseudo-random (PRN) noise yang digunakan sebagai pemberi informasi jarak, yaitu kode P (precise atau private) dan kode C/A (coarse acquisition atau clear access). Kode-kode ini merupakan suatu rangkaian kombinasi kode biner yang acak, sehingga dinamakan pseudo-random, seperti yang ditunjukkan pada gambar
Kode-kode tersebut mempunyai struktur yang unik dan tertentu yang dibangun menggunakan suatu algoritma matematik tertentu. Pada dua kode PRN yang sama, susunan struktur hanya akan berimpit sekali saja. Suatu satelit GPS mempunyai struktur kode yang unik dan berbeda dengan satelit-satelit lainnya. Hal ini menyebabkan receiver GPS mampu mengenali dan membedakan sinyal-sinyal yang datang dari satelit-satelit yang berbeda.
2.2.2 Gelombang Pembawa (Fase)
Setiap satelit GPS secara kontinyu memancarkan sinyal-sinyal gelombang pada dua frekuensi L-Band yang dinamakan L1dan L2. Sinyal L1 berfrekuensi 1575.42 mHz dengan panjang gelombang 19 cm, dan sinyal L2 berfrekuensi 1227.0 mHz dengan panjang gelombang 24.4 cm. Gelombang dua frekuensi disebut gelombang pembawa karena penjalarannya memodulasi kode-kode PRN. Gelombang L1 dimodulasi dengan kode P dan kode C/A serta pesan navigasi, sedangkan gelombang L2 dimodulasi dengan kode P dan pesan navigasi.
Pada mulanya, gelombang pembawa hanya didesain untuk membawa data kode dan pesan navigasi dari satelit ke receiver. Tetapi data fase dari gelombang pembawa dapat digunakan untuk menentukan jarak geometrik dari pengamat ke satelit. Bahkan untuk aplikasi-aplikasi yang menuntut ketelitian posisi yang tinggi (orde cm hingga mm) data fase harus digunakan karena pada dasarnya jarak fase akan jauh lebih teliti dibandingkan dengan pseudorange.
Prinsip penggunaan data fase dari gelombang pembawa pada dasarnya adalah mengukur beda fase antara fase gelombang pembawa yang dipancarkan oleh satelit dengan fase dari sinyal yang dibangkitkan oleh oscilator receiver. Proses penentuan jarak dengan data ukuran fase ditunjukkan oleh gambar 2.3.
jumlah gelombang penuhyang diamati
hasil ukuran fase total ( o ) pada epok t1
t1
pengamat
jumlah gelombang penuh (N) yang tidak teramati (tidak
diketahui). Disebut juga cycle ambiguity.
Satelit Ukuran fase pada epok t1 (fraksi gelombang)
t0
Jarak dari pengamat ke satelit = panjang gelombang . ( o + N )
Gambar 2.3 Penentuan Jarak dari Pengamat ke Satelit dengan Data Fase [Abidin, 2007]
Jika fase gelombang pembawa yang dipancarkan satelit adalah φs(t) dengan frekuensi fs, serta fase gelombang yang dibangkitkan di receiver adalah φr(t) dengan frekuensi fr, di
mana t merupakan epok dalam sistem waktu GPS yang dihitung sejak epok awal T0 = 0,
maka akan didapatkan persamaan untuk masing-masing fase adalah (Hofmann-Wollenhof, 1992):
φs
(t) = fst – fs(ρ/c) – φ0s (2.5)
φr(t) = fr t –f0r
Adanya fase awal φ0s dan φ0r yang tidak sama dengan nol disebabkan oleh karena adanya
bias waktu pada receiver dan satelit yang besarnya adalah:
φ0s = fsδs (2.6)
φ0r = frδr
Maka fase beat φrs(t) antara kedua fase pada persamaan (2.5) tersebut memberikan hasil
sebagai berikut: φrs(t) = φs(t) - φr(t)
Besar simpangan yang ada pada frekuensi fs dan fr dari frekuensi dasar f hanya dalam skala kecil saja sehingga:
fs ≈ fr≈ f (2.8)
dengan demikian persamaan (2.7) dapat ditulis menjadi:
φrs(t) = - fs(ρ/c) –fΔδ (2.9)
dimana seperti telah disebutkan sebelumnya bahwa Δδ = δs - δr
Ketika receiver mengamati sinyal pada epok t0, sejak saat itu dilakukan pengukuran
terhadap fase beat fraksional (perbedaan antara gelombang yang dipancarkan oleh satelit dengan replika gelombang yang dibangkitkan oleh receiver), dan pada pengamatan awal tersebut bilangan bulat N (yang merupakan kelipatan gelombang) antara satelit dengan receiver tidaklah dapat ditentukan nilainya. Tetapi jika sepanjang receiver dapat mengamati sinyal secara kontinyu, nilai dari bilangan bulat N tersebut, yang dikenal sebagai ambiguitas fase, harganya tetap sehingga dapat ditentukan sebagai salah satu parameter pada saat dilakukan pengolahan data. Maka selanjutnya fase beat pada epok t dapat dituliskan sebagai berikut:
φrs(t) = Δ φrs│t t0 + N (2.10)
Di mana φrs merupakan fraksi gelombang yang diukur pada epok t ditambah dengan
GPS Orbit ΔФ3 ΔФ1 ΔФ2 GPS Receiver N(to) N(to) N(to) t1 t2 t3 ΔФi=Fr(Ф(ti) + Int (Ф;to,ti)
Hasil ukuran fase pada setiap epok : Ф(ti) = Fr(Ф(ti)) + Int (Ф;to,ti) + N (to) = N(to) + Δ Ф
Gambar 2.4 Interpretasi Geometrik Jarak Fase [Abidin, 2007]
Interpretasi geometrik dari persamaan (2.10) dapat dilihat pada Gambar 2.6 dimana Δ φrs│t t0 diwakili oleh notasi ΔφI (i = 1,2) dan untuk penyederhanaan Δφ0 diasumsikan
bernilai nol. Dengan melakukan substitusi persamaan (2.10) pada persamaan (2.9) serta menyatakan Ф = Δφ rs N c + ∆ + = Φ λ δ λ ρ
, maka dihasilkan jarak fase pseudorange dalam satuan cycle sebagai berikut:
(2.11)
Jika persamaan (2.11) dikalikan dengan panjang gelombang λ, maka akan didapatkan persamaan dalam satuan panjang. Di mana ρ merupakan jarak antara satelit pada saat dipancarkan sinyal (t), dan receiver pada saat penerimaan (t + Δt).
2.3 Penentuan posisi dengan GPS
Survey dengan GPS menurut cara penentuan posisinya terbagi menjadi dua, yaitu: penentuan posisi titik tunggal (absolute positioning), dan penentuan posisi secara diferensial (differential positioning). Penentuan posisi tunggal adalah penentuan posisi dengan menggunakan satu buat receiver GPS, di mana posisi tersebut relatif terhadap posisi satelit. Sedangkan penentuan posisi secara diferensial adalah penentuan posisi suatu titik yang ditentukan berdasarkan titik lain yang telah diketahui koordinatnya. Oleh karena itu penentuan posisi diferensial membutuhkan setidaknya dua buah receiver GPS. Penentuan posisi secara diferensial akan memberikan ketelitian yang lebih tinggi dibandingkan dengan penentuan posisi secara absolut, karena pada pengamatan diferensial beberapa kesalahan pengamatan akan tereliminir.
Berdasarkan keadaan titik yang akan diamati, survey GPS dapat dibedakan menjadi dua, yaitu: statik dan kinematik. Dalam survey statik, titik yang diamati berada dalam keadaan diam (statik), sedangkan pada survey kinematik, titik yang akan diamati dalam keadaan bergerak secara kontinyu.
Berdasarkan aplikasinya, penentuan posisi dengan GPS dapat dibagi berdasarkan dua kategori, yaitu survey dan navigasi, seperti yang terlihat pada gambar 2.5 di bawah ini.
Gambar 2.5 Metode Penentuan Posisi dengan GPS [Abidin, 2007]
Pada pengamatan dengan GPS, ketelitian posisi yang didapatkan memiliki selang yang cukup luas, dari orde milimeter hingga orde meter, seperti yang ditunjukkan oleh gambar 2.6 berikut ini.
Standart Positioning Service (for civilians)
Precise Positioning Service (for military and authorized
users)
Differential code
Carrier-smoothed code
Ambiguity-resolved carrier phase
Static survey (carrier phase) 10 m 5 m 3 m 1 m 5 cm 3 mm 1 mm 1 cm 1 m 10 m ABSOLUTE POSITIONING DIFFERENTIAL POSITIONING
Gambar 2.6 Spektrum ketelitian posisi GPS [ Abidin, 2007]
PENENTUAN POSISI DENGAN GPS
NAVIGASI SURVEY
ABSOLUT DIFERENSIAL DIFERENSIAL ABSOLUT
POST-PROCESSING REAL-TIME STATIK PSEUDO-KINEMATIC STOP AND GO STATIK SINGKAT KINEMATIK
Ketelitian posisi yang didapat dari pengukuran GPS bergantung pada empat faktor yaitu : metode penentuan posisi yang digunakan, geometri dan distribusi satelit yang diamati, ketelitian data yang digunakan, serta strategi pengolahan data yang diterapkan.
Pada survey airborne LIDAR, metode penenetuan posisi dengan GPS yang digunakan adalah metode differensial kinematik dengan menggunakan data fase. Sehingga ketelitian yang diharapkan adalah pada level centimeter.
2.4 Kesalahan dan Bias pada Pengamatan GPS
Dalam pengamatan GPS akan selalu dihinggapi oleh beberapa kesalahan dan bias yang mengakibatkan kurang baiknya hasil ukuran jarak geometrik antara pengamat dengan GPS. Berikut ini adalah beberapa kesalahan dan bias yang mempengaruhi pengamatan GPS.
2.4.1 Kesalahan Ephemeris
Kesalahan ephemeris (orbit satelit) adalah kesalahan di mana orbit satelit yang dilaporkan oleh ephemeris satelit tidak sama dengan orbit satelit yang sebenarnya. Kesalahan orbit satelit umumnya disebabkan oleh tiga faktor sebagai berikut [Abidin, 1993]:
1. Kekurangtelitian proses perhitungan orbit satelit oleh stasiun kontrol.
2. Kesalahan dalam prediksi orbit untuk periode waktu setelah uploading data ke satelit.
3. Penerapan kesalahan orbit yang disengaja (selective availability) yang diaplikasikan untuk memproteksi ketelitian yang tinggi.
Dalam penentuan posisi secara diferensial, semakin panjang garis basis yang diamati, maka akan semakin besar efek dari bias ephemeris terhadap jarak ukuran.
Kesalahan orbit satelit tidak berkorelasi secara spasial yang dipisahkan oleh jarak yang panjang. Dengan kata lain, nilai pseudorange yang dipengaruhi oleh kesalahan ephemeris pada suatu daerah tidak akan sama dengan daerah lainnya. Kesalahan tersebut tergantung pada orientasi vektor kesalahan orbit satelit dalam ruang dan relatif terhadap vektor jarak setiap satelit terhadap dua daerah.
2.4.2 Kesalahan jam Satelit dan Jam receiver
Prinsip pengamatan GPS yang menggunakan data pengamatan fase dalam penentuan jarak geometrik antara satelit dan receiver adalah mengamati beda waktu atau beda fase antara epok pemancaran sinyal dan satelit dengan penerimaan sinyal oleh receiver.
Pengamatan ini tentunya memakai dua pengukur waktu yaitu jam pada satelit dan jam pada receiver. Jarak geometrik yang diperoleh pada pengamatan ini akan benar jika kedua jam tersebut mempunyai waktu yang sinkron. Tetapi sinkronisasi dari kedua pengukur waktu tersebut sangat sulit sehingga akan terjadi kesalahan pada jarak geometrik yang dihasilkan. Untuk mengatasinya maka ditentukan sistem waktu yang menjadi referensi untuk kedua waktu tersebut yaitu GPS Time (GPST).
Meskipun menggunakan sistem waktu GPS Time, kesalahan waktu masih tetap akan ada baik pada satelit maupun receiver. Pada satelit akan terjadi penyimpangan waktu terhadap GPS Time yang diakibatkan oleh kebijakan Selective Availability yang diterapkan oleh pemerintah Amerika Serikat. Kesalahan jam satelit dapat ditentukan melalui pendekatan deret polinomial dan bersifat sistematik. Sedangkan pada receiver akan terjadi penyimpangan terhadap GPS Time yang disebabkan oleh beberapa faktor seperti berikut [Rizoz, 1993]:
1. Kestabilan skala waktu yang dihasilkan masih bergantung pada kualitas osilator receiver yang digunakan, serta seberapa sering waktu yang ada dibandingkan kembali dengan GPS Time.
2. Sinkronisasi waktu receiver ke waktu waktu GPS Time dengan keakuratan 0.1 sangat rentan untuk menimbulkan kesalahan. Oleh karena itu kesalahan residual dalam orde deka meter (puluhan meter) harus tetap diperhitungkan.
2.4.3 Bias Ionosfer
Ionosfer adalah bagian dari lapisan atmosfer yang berada pada ketinggian 60 hingga 1000 kilometer di atas permukaan bumi. Pada lapisan ionosfer ini terdapat sejumlah elektron dan ion bebas yang mempengaruhi perambatan gelombang radio. Sehingga sinyal dari satelit GPS yang terletak kira-kira 20.000 km di atas permukaan bumi harus melalui lapisan ionosfer untuk dapat sampai pada antena receiver di permukaan bumi
Ion-ion bebas (elektron) dalam lapisan ionosfer akan mempengaruhi propagasi sinyal GPS. Lapisan ionosfer akan mempengaruhi kecepatan, arah, polarisasi, dan kekuatan
pembawa dan memperlambat kode sehingga akan mempengaruhi ukuran jarak geometrik dari satelit ke pengamat.
Bias yang ditimbulkan oleh lapisan ionosfer ini merupakan faktor yang sangat mempengaruhi dalam penentuan nilai ambiguitas fase yang bernilai integer. Untuk garis basis pendek, efek dari ionosfer dapat diabaikan karena apabila dilakukan kombinasi liner bebas ionosfer untuk mengeliminasi efek ini, hanya akan meningkatkan noise level.
2.4.4 Bias Troposfer
Sinyal dari satelit sampai pada receiver melalui lapisan troposfer. Troposfer merupakan lapisan atmosfer netral yang berbatasan dengan permukaan bumi, dengan ketebalan 9-16 km, bergantung pada tempat dan waktu. Pada saat sinyal GPS melalui lapisan troposfer, sinyal akan mengalami refraksi yang mengakibatkan perubahan pada kecepatan dan arah dari sinyal GPS.
Akibat efek dari lapisan troposfer, carrier phase dan kode akan diperlambat sehingga berpengaruh terhadap jarak hasil ukuran. Pengaruh ini merupakan fungsi dari kelembaban, suhu, dan tekanan.
Lapisan troposfer bukan merupakan lapisan yang bersifat dipersif terhadap gelombang dengan frekuensi di bawah 30 GHz, sehingga refraksi yang dialami gelombang elekromagnetik dari GPS yang melalui lapisan ini tidak bergantung pada frekuensinya.
Cara paling mudah dalam mengeliminasi bisa troposfer ini adalah dengan cara melakukan kombinasi linier pengamatan (differencing). Selain itu efek bias troposfer dapat juga dikoreksi dengan menggunakan model Hopfield, Saastamoinen, Marini, Goad, dan Godman.
2.4.5 Efek Multipath
Multipath adalah fenomena di mana sinyal satelit tiba pada receiver melalui dua atau lebih lintasan yang berbeda. Terdapat sinyal yang tiba pada antena receiver setelah memantul pada objek lain terlebih dahulu, seperti jalan raya, gedung, kendaraan, dll. Sinyal yang berasal dari satelit yang mempunyai sudut eleasi rendah sangat rentan terkena efek multipath.
Gambar 2.7 Efek Multipath [Abidin, 2007]
Efek multipath akan berpengaruh pada data pengamatan fase maupun pseudorange. Besarnya efek dari multipath bergantung pada jenis dan posisi objek pemantul, posisi relatif satelit, jarak bidang pemantul ke antena receiver, panjang gelombang sinyal, dan
L = Sinyal Langsung
P = Sinyal Pantulan
Efek Multipath = resultan (L+P) - L Satelit
phase.
Kesalahan akibat multipath ini bersifat sistematik tetapi tidak dapat dimodelkan secara umum karena sifat geometrinya yang tidak teratur [Hofmann-Wollenhof, 1992]. Karena itu pendekatan secara matematis untuk pengeliminiran efek multipath bukanlah pekerjaan yang mudah. Maka tindakan yang dapat dilakukan untuk menanggulangi efek multipath adalah dengan cara:
1. Menghindari lingkungan yang bersifat reflektif
2. Menggunakan antena GPS yang dapat beroperasi dalam keadaan baik 3. Menghindari penggunaan satelit yang bersudut elevasi rendah
2.4.6 Ambiguitas Fase
Ambiguitas fase dari pengamatan fase sinyal adalah jumlah gelombang penuh yang tidak teramati dalam pengamatan oleh receiver GPS. Untuk dapat merekonstruksi jarak ukuran antara satelit dan receiver, maka harga ambiguitas fase harus ditentukan terlebih dahulu. Ambiguitas fase merupakan bilangan bulat kelipatan panjang gelombang. Setiap data pengamatan one-way fase yang terkait dengan satelit tertentu akan memiliki harga ambiguitas tersendiri, dan sepanjang receiver mengamati sinyal secara kontinyu (tidak terjadi cycle slip), maka nilai ambiguitas fase akan selalu sama untuk setiap epok.
Pada pengamatan one-way dan single-difference, ambiguitas fase sulit dipisahkan dengan efek kesalahan jam pada receiver atau satelit, oleh karena itu sifat kebulatan harganya
sulit dieksploitasi. Sedangkan pada pengamatan double-difference, efek kesalahan jam pada receiver atau satelit sudah tereliminasi, sehingga sifat kebulatan harganya dapat dieksploitasi. Oleh karena itu, penentuan harga ambiguitas fase biasanya dilakukan dengan pengamatan double-difference.
Secara umum ada tiga aspek yang harus diperhitungkan dalam proses resolusi ambiguitas, yaitu: eliminasi kesalahan dan bias dari data, geometri satelit, serta teknik resolusi ambiguitas itu sendiri.
2.4.7 Cycle Slip
Cycle slip adalah ketidak-kontinyuan adalam jumlah gelombang penuh dari fase gelombang pembawa yang diamati, karena receiver yang terputus dalam pengamatan sinyal. Fenomena cycle slip dapat disebabkan oleh beberapa hal seperti berikut:
1. Mematikan dan menghidupkan receiver secara sengaja
2. Terhalangnya sinyal GPS untuk masuk ke antena oleh objek-objek seperti bangunan, pohon, dll
3. Rendahnya rasio signal-to-noise, yang bisa disebabkan oleh beberapa faktor seperti dinamika receiver yang tinggi, aktivitas ionosfer yang tinggi, atau efek multipath
lain:
− Penggunaan polinomial berorde rendah yang dicocokkan (fitting) ke time series dari variabel yang diuji.
− Penggunaan model dinamik untuk memprediksi data ukuran dengan menggunakan Kalman Filtering. Perbandingan antara data ukuran hasil prediksi dengan hasil ukuran sebenarnya, digunakan sebagai basis pendeteksian cycle slip.
− Penggunaan skema pengurangan (differencing) data ukuran antar epok yang berorde dua, tiga, dan empat.
2.5 Penentuan Posisi Differensial Kinematik dengan Data Fase
Posisi wahana terbang saat melakukan survey airborne LIDAR selalu berubah, dan memerlukan ketelitian yang relatif tinggi (level centimeter). Oleh karena itu metode penentuan posisi dengan GPS yang digunakan adalah metode diferensial kinematik dengan data fase.
2.5.1 Prinsip Penentuan Posisi
Penentuan posisi secara kinematik adalah penentuan posisi dari titik-titik yang bergerak dan receiver GPS tidak dapat atau tidak punya kesempatan untuk berhenti pada titik-titik tersebut [Abidin, 1995]. Posisi yang ditentukan adalah setiap epok pengamatan. Dengan demikian setiap posisi titik yang bergerak hanya dapat diamati tidak lebih dari satu epok.
Data fase dari gelombang pembawa digunakan karena dapat memberikan ketelitian yang lebih tinggi dibandingkan jika menggunakan data kode. Penggunaan data fase membutuhkan pemecahan nilai ambiguitas fase, dan pada survey kinematik pemecahan nilai ambiguitas fase tersebut dilakukan secara on-the-fly, yaitu penentuan nilai ambiguitas fase pada saat receiver sedang bergerak dalam waktu yang sesingkat mungkin.
2.5.2 Ketelitian dan Faktor-faktor yang Mempengaruhi
Terdapat beberapa faktor yang mempengaruhi ketelitian penentuan posisi dengan metode differensial kinematik dengan data fase, antara lain :
1. Jumlah satelit
2. Lokasi dan distribusi satelit 3. Lama pengamatan
4. Kualitas receiver
5. Jarak dari receiver ke stasiun referensi 6. Keadaan cuaca pada saat pengamatan
Sedangkan ketelitian yang dapat dihasilkan dari survey differensial kinematik dengan data fase adalah pada orde centimeter.
2.5.3 On-The-Fly Ambiguity Resolution
Penentuan posisi dengan GPS menggunakan metoda kinematik dengan data fase memerlukan penyelesaian masalah ambiguitas fase secara on-the-fly. Secara umum,
2.8.
Gambar 2.8 Strategi umum penentuan ambiguitas fase secara on-the-fly [abidin, 1992]
Dalam hal ini penentuan ambiguitas dilakukan dengan menguji sejumlah kombinasi dari set ambiguitas dalam suatu ruang pencarian (searching space) yang dikonstruksi sebelumnya. Pengujian juga dapat dilakukan terhadap sejumlah posisi, di mana suatu posisi mewakili suatu set ambiguitas tertentu. Dalam hal ini, ruang pencarian yang berisikan kombinasi dari set-set ambiguitas dinamakan ruang matematik (mathematical space) dan ruang pencarian yang berisikan posisi-posisi yang mewakili set-set ambiguitas dinamakan ruang fisik (physical space). Ruang matematik umumnya dipusatkan pada harga pendekatan awal dari ambiguitas, sedangkan ruang fisik dipusatkan pada posisi pendekatan awal. 1 Ambiguitas atau posisi awal 2 Ruang pencarian ambiguitas 3
Kriteria penolakan dan validasi 4 Kriteria pemasti 5 PENETAPAN AMBIGUITAS ya ya tidak tidak Proses pencarian (identifiaksi)
Proses pencarian set ambiguitas yang benar dilakukan dengan menerapkan beberapa kriteria penolakan dan validasi (KPV) terhadap set-set ambiguitas ataupun posisi-posisi yang diuji. Proses pencarian ini akan dihentikan dan set ambiguitas yang benar akan ditetapkan bila kriteria pemasti (KP) telah dipenuhi.
Penentuan ambiguitas fase secara on-the-fly merupakan gabungan dari beberapa teknik penentuan ambiguitas fase, yaitu: teknik extrawidelaning, teknik ambiguity mapping function, dan teknik kuadrat terkecil (Abidin, 1992).
a. Teknik Extrawidelanning
Teknik extrawidelaning biasanya digunakan untuk data GPS dua frekuensi. Teknik penentuan ambiguitas fase ini tidak dipengaruhi oleh kesalahan jam satelit, kesalahan jam receiver, efek troposfer, dan kesalahan ephemeris, tetapi sangat sensitif terhadap efek ionosfer, multipath, dan noise pengamatan. Teknik extrawidelaning ini tidak secara langsung menggunakan data pengamatan GPS, tetapi menggunakan beberapa kombinasi linear dari gelombang fase wide-lane dan narrow-lane beserta data pengamatan ionosfer.
Penentuan ambiguitas fase dengan teknik extrawidelaning ini melalui beberapa tahapan. Tahap pertama adalah smoothing data pseudorange oleh gelombang pembawa [Hatch, 1982] untuk mereduksi kesalahan noise dan efek multipath yang mengkontaminasi data pseudorange. Selanjutnya dilakukan pencarian nilai apriori dari ambiguitas gelombang wide-lane yang kemudian bilangan ambiguitas fase wide-lane tersebut diestimasi untuk
apriori dari ambiguitas fase gelombang wide-lane tersebut (Abidin, 1992): ∆ Σ ∆ ∇ − ∆ ∆ ∇ + Σ ∆ ∇ − ∆ ∆ ∇ + ∆ ∆ ∇ − Σ ∆ ∇ = ∆ ∆ ∇ λ υ υ ) ( ) ( ) ( P L MC MP C P N (2.12) di mana:
PΣ = pseudorange yang telah smooth pada gelombang narrow-lane LΔ = kombinasi gelombang pembawa wide-lane
MCΔ, MPΣ = efek multipath yang telah direduksi υCΔ, υPΣ = gangguan (noise) yang telah direduksi λΔ = panjang gelombang dari sinyal
b. Teknik Ambiguity Mapping Function
Penentuan ambiguitas fase dengan teknik ambiguity mapping function adalah dengan menggunakan model matematis sebagai berikut (Abidin, 1992):
)]}
(
[
exp{
)
(
, , , , 1 1 1 ϖ ϖr
i
r
AMF
obsjkl calcjklnf l ns k ne j
Σ
Σ
Φ
−
Φ
Σ
=
= = = (2.13) di mana:rω = posisi vektor dalam koordinat kartesian atau ellipsoid
Фobs = pengamatan single-difference atau double-difference pada posisi rω (rad)
Фcalc = hitungan single-difference atau double-difference pada posisi rω (rad)
ne = jumlah epok pengamatan ns = jumlah satelit
c. Teknik Kuadrat Terkecil
Penentuan ambiguitas fase dengan menggunakan teknik kuadrat terkecil didasari atas hitungan perataan kuadrat terkecil. Tujuan hitung perataan kuadrat terkecil dalam metoda ini digunakan untuk menentukan faktor variansi aposteriori yang diestimasi guna memisahkan nilai ambiguitas fase yang benar dari ambiguitas fase yang salah. Dengan uji statistik ditentukan apakah nilai faktor variansi aposteriori yang diestimasi itu dapat diterima atau ditolak dengan cara menguji kesesuaian antara nilai variansi aposteriori setelah hitung perataan (σ^
02) dengan nilai variansi apriori sebelum hitung perataan (σ02
Deviasi spasial adalah perbedaan posisi antara lokasi antena GPS dengan lokasi laser scanner pada wahana terbang, seperti yang diilustrasikan pada gambar 2.8. Sistem ). Nilai faktor variansi aposteriori akan diterima apabila nilainya konsisten terhadap faktor variansi apriori. Sedangkan beberapa penyebab kegagalan dalam penentuan nilai ambiguitas fase yang benar adalah karena model matematik dan model stokastik yang tidak sesuai, kesalahan dan bias pengamatan yang tidak dapat dimodelkan, serta bobot data pengamatan yang tidak realistis.
2.5.4 Deviasi Spasial dan Temporal
Dalam sistem airborne LIDAR, GPS dan laser scanner merupakan dua komponen yang dioperasikan secara terpisah. Terdapat perbedaan spasial dan temporal di antara kedua alat tersebut.
Δz). Nilai dari Δx, Δy, Δz ini harus ditentukan/diukur terlebih dahulu. Antena GPS Laser Scanner Δx WAHANA TERBANG Δz Δy y z x
Gambar 2.9 Deviasi Spasial antara Antena GPS dan Laser Scanner
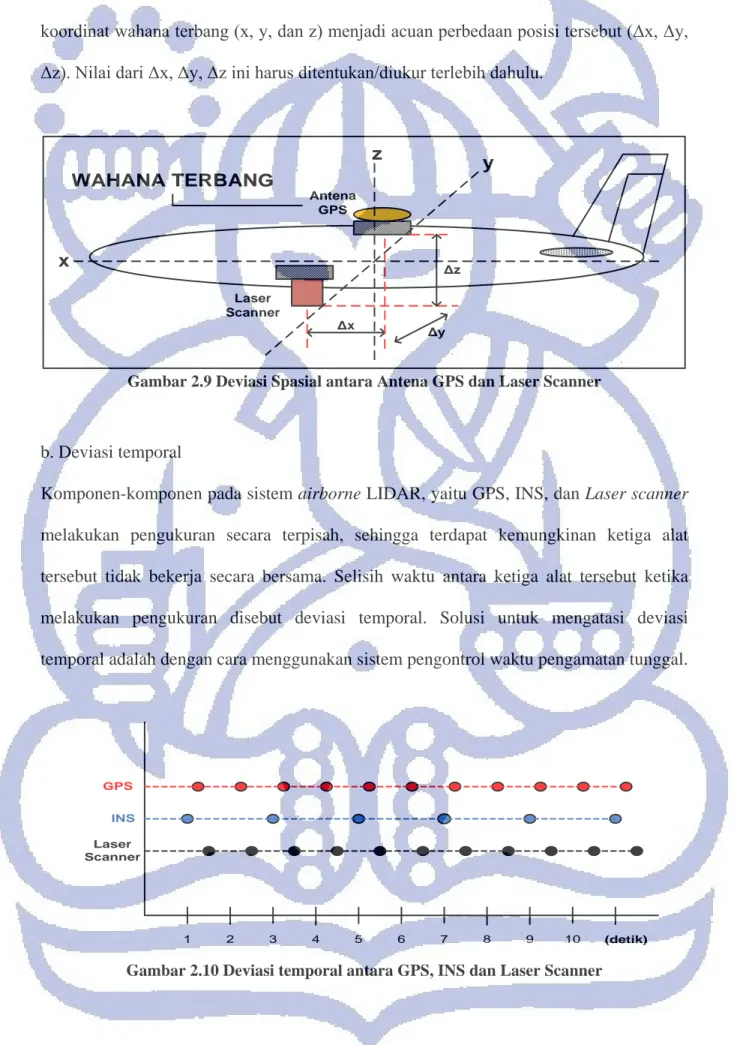
b. Deviasi temporal
Komponen-komponen pada sistem airborne LIDAR, yaitu GPS, INS, dan Laser scanner melakukan pengukuran secara terpisah, sehingga terdapat kemungkinan ketiga alat tersebut tidak bekerja secara bersama. Selisih waktu antara ketiga alat tersebut ketika melakukan pengukuran disebut deviasi temporal. Solusi untuk mengatasi deviasi temporal adalah dengan cara menggunakan sistem pengontrol waktu pengamatan tunggal.
GPS
INS
Laser Scanner
1 2 3 4 5 6 7 8 9 10 (detik)
![Gambar 2.1 Tiga Segmen GPS [Abidin, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/4617612.3373581/2.918.105.830.69.1129/gambar-tiga-segmen-gps-abidin.webp)
![Gambar 2.2 Prinsip Penentuan Jarak Pseudorange [Abidin, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/4617612.3373581/4.918.106.822.78.1120/gambar-prinsip-penentuan-jarak-pseudorange-abidin.webp)
![Gambar 2.3 Penentuan Jarak dari Pengamat ke Satelit dengan Data Fase [Abidin, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/4617612.3373581/7.918.96.829.72.1131/gambar-penentuan-jarak-pengamat-satelit-data-fase-abidin.webp)
![Gambar 2.4 Interpretasi Geometrik Jarak Fase [Abidin, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/4617612.3373581/9.918.106.824.80.1117/gambar-interpretasi-geometrik-jarak-fase-abidin.webp)
![Gambar 2.5 Metode Penentuan Posisi dengan GPS [Abidin, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/4617612.3373581/11.918.97.824.78.1133/gambar-metode-penentuan-posisi-gps-abidin.webp)
![Gambar 2.7 Efek Multipath [Abidin, 2007]](https://thumb-ap.123doks.com/thumbv2/123dok/4617612.3373581/16.918.104.826.76.1115/gambar-efek-multipath-abidin.webp)
![Gambar 2.8 Strategi umum penentuan ambiguitas fase secara on-the-fly [abidin, 1992]](https://thumb-ap.123doks.com/thumbv2/123dok/4617612.3373581/21.918.103.826.74.1119/gambar-strategi-umum-penentuan-ambiguitas-fase-secara-abidin.webp)