Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem
realisasi skripsi ini antara lain
strategi panggul, dan strategi rotasi lengan.
2.1. Center of Mass (CoM)
acuan untuk melihat kemiringan robot akibat gaya dan momentum dialami robot yang dijadikan sebagai nilai
Gambar 2.1. Letak
Berdasarkan Gambar 2.1 letak CoM berada pada bagian tengah tubuh robot, sehingga robot humanoid
memiliki ciri khas yang sama yaitu memiliki pusat massa yang berada di poros pergerakannya, poros pergerak
kaki robot.
3
BAB II
DASAR TEORI
Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem yang dirancang. Teori-teori yang digunakan dalam realisasi skripsi ini antara lain center of mass, complementary filter, si
strategi panggul, dan strategi rotasi lengan.
(CoM)
Pada bagian ini akan dijelaskan mengenai teori Center of Mass hubungannya dengan robot humanoid.
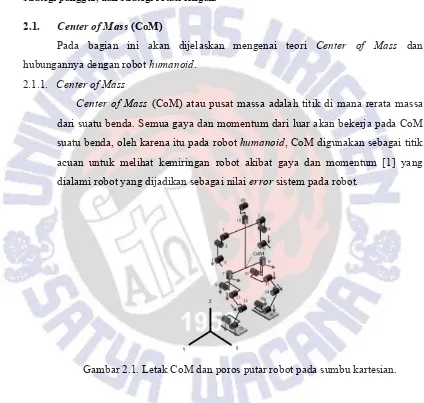
Center of Mass (CoM) atau pusat massa adalah titik di
dari suatu benda. Semua gaya dan momentum dari luar akan bekerja pada , oleh karena itu pada robot humanoid, CoM digunakan sebagai titik acuan untuk melihat kemiringan robot akibat gaya dan momentum
dialami robot yang dijadikan sebagai nilai error sistem pada robot.
1. Letak CoM dan poros putar robot pada sumbu kartesian.
Berdasarkan Gambar 2.1 letak CoM berada pada bagian tengah tubuh robot, humanoid dapat dimodelkan dengan pendulum terbalik karena memiliki ciri khas yang sama yaitu memiliki pusat massa yang berada di poros pergerakannya, poros pergerakan robot humanoid berada pada telapak Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai teori yang digunakan dalam sistem kendali PID,
Center of Mass dan
mana rerata massa Semua gaya dan momentum dari luar akan bekerja pada CoM digunakan sebagai titik acuan untuk melihat kemiringan robot akibat gaya dan momentum [1] yang
sistem pada robot.
robot pada sumbu kartesian.
2.1.2. Pengukuran letak dan low pass filter. Filter
noise pada frekuensi tinggi dan frekuensi rendah menggabungkan dua buah m
hasil yang sama sehingga mendapat hasil yang akurat dan bebas komputasi cepat.
Pada perancangan sistem kestabilan pada robot Measurement Unit (IMU)
memiliki beberapa sensor yang digunakan untuk mengukur momen inersia atau gaya akibat dari gravitasi, sensor yang dipakai adalah sensor
untuk mengukur percepatan
4 letak Center of Mass
umum letak CoM suatu benda dapat dicari menggunakan persamaa
= ∑
= ∑
= ∑
Persamaan 1, 2 dan 3 [2] merupakan letak CoM pada koordinat total massa benda, m adalah massa benda yang berada
z. Karena sistem pada robot humanoid tidak linear maka untuk mengukur letak CoM pada robot digunakan metode penimbangan pada sebuah jungkat jungkit dan diukur di mana titik paling seimbang dari robot.
Complementary Filter
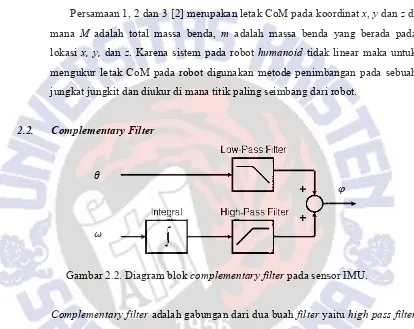
. Diagram blok complementary filter pada sensor IMU.
Complementary filter adalah gabungan dari dua buah filter yaitu
Filter ini memiliki dua buah masukan yang memiliki gangguan atau pada frekuensi tinggi dan frekuensi rendah [3]. Keuntungan dari
menggabungkan dua buah masukan dengan hubungan derivative untuk mendapatkan hasil yang sama sehingga mendapat hasil yang akurat dan bebas noise
Pada perancangan sistem kestabilan pada robot ini, digunakan sensor
(IMU) sebagai umpan balik pada kontrol PID. Pada sensor IMU memiliki beberapa sensor yang digunakan untuk mengukur momen inersia atau gaya akibat dari gravitasi, sensor yang dipakai adalah sensor accelerometer
untuk mengukur percepatan akibat gravitasi dan sensor gyroscope
dapat dicari menggunakan persamaan mana titik paling seimbang dari robot.
pada sensor IMU.
yaitu high pass filter ini memiliki dua buah masukan yang memiliki gangguan atau
. Keuntungan dari filter ini adalah asukan dengan hubungan derivative untuk mendapatkan noise dengan proses
kecepatan sudut (Angular Velocity) karakteristik yang berbeda di
tinggi, dan sensor gyroscope
Gambar 2.2. Oleh karena itu diperlukan sebuah mendapatkan hasil yang akurat
complementary filter untuk mendapat nilai sudu
Di mana pada Persamaan 4, filter, adalah nilai sudut awal pembacaan accelerometer
gyroscope, dan adalah periode cuplik. Untuk mendapatkan nilai koefisien digunakan bisa dilihat pada Persamaan 5
konstanta waktu adalah nilai yang digunakan untuk melewatkan sinyal masukan yang sesuai waktu respon pada
mendekati 1 maka filter frekuensi tinggi semakin
sebaliknya jika nilai K semakin kecil mendekati
high pass filter dan gangguan pada frekuensi rendah akan se gangguan pada frekuensi tinggi tetap ada.
Pada percobaan dan implementasi digunakan nilai
cuplik sebesar 1ms yang menghasilkan data percobaan seperti pada Gambar 2.3
5
(Angular Velocity). Kedua sensor ini memiliki karakteristik yang berbeda di mana sensor accelerometer memiliki noise
gyroscope memiliki gangguan pada frekuensi rendah . Oleh karena itu diperlukan sebuah filter untuk menghilangkan
mendapatkan hasil yang akurat dan bebas noise. Berikut adalah persamaan untuk mendapat nilai sudut kemiringan robot :
= ( + ) + (1 )
=( )
Di mana pada Persamaan 4, adalah nilai sudut hasil filter,
adalah nilai sudut awal, adalah nilai sudut sekarang atau nilai dari accelerometer, adalah nilai kecepatan sudut atau nilai dari pembacaan
adalah periode cuplik. Untuk mendapatkan nilai koefisien an bisa dilihat pada Persamaan 5 [3] di mana τ adalah konstanta waktu. konstanta waktu adalah nilai yang digunakan untuk melewatkan sinyal masukan yang sesuai waktu respon pada filter. Nilai K bernilai 0 sampai 1, jika nilai
filter akan lebih dominan pada low pass filter dan
semakin hilang tetapi gangguan pada frekuensi rendah tetap ada, semakin kecil mendekati 0 maka filter akan lebih dominan pada dan gangguan pada frekuensi rendah akan semakin hilang tetapi gangguan pada frekuensi tinggi tetap ada.
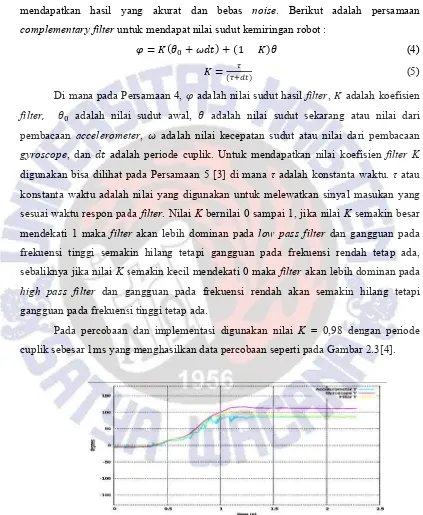
Pada percobaan dan implementasi digunakan nilai K = 0,98 dengan periode cuplik sebesar 1ms yang menghasilkan data percobaan seperti pada Gambar 2.3
Gambar 2.3. Percobaan complementary filter
. Kedua sensor ini memiliki noise dengan noise pada frekuensi memiliki gangguan pada frekuensi rendah seperti pada untuk menghilangkan noise agar . Berikut adalah persamaan adalah periode cuplik. Untuk mendapatkan nilai koefisien filter K
adalah konstanta waktu. τ atau konstanta waktu adalah nilai yang digunakan untuk melewatkan sinyal masukan yang bernilai 0 sampai 1, jika nilai K semakin besar dan gangguan pada hilang tetapi gangguan pada frekuensi rendah tetap ada, akan lebih dominan pada makin hilang tetapi
= 0,98 dengan periode cuplik sebesar 1ms yang menghasilkan data percobaan seperti pada Gambar 2.3[4].
6
2.3. Sistem Kendali Proportional Integral Derivative (PID)
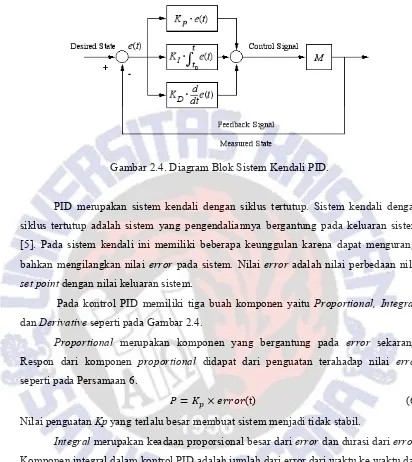
Gambar 2.4. Diagram Blok Sistem Kendali PID.
PID merupakan sistem kendali dengan siklus tertutup. Sistem kendali dengan siklus tertutup adalah sistem yang pengendaliannya bergantung pada keluaran sistem [5]. Pada sistem kendali ini memiliki beberapa keunggulan karena dapat mengurangi bahkan mengilangkan nilai error pada sistem. Nilai error adalah nilai perbedaan nilai set point dengan nilai keluaran sistem.
Pada kontrol PID memiliki tiga buah komponen yaitu Proportional, Integral, dan Derivative seperti pada Gambar 2.4.
Proportional merupakan komponen yang bergantung pada error sekarang. Respon dari komponen proportional didapat dari penguatan terahadap nilai error seperti pada Persamaan 6.
= × (t) (6)
Nilai penguatan Kpyang terlalu besar membuat sistem menjadi tidak stabil.
Integral merupakan keadaan proporsional besar dari error dan durasi dari error. Komponen integral dalam kontrol PID adalah jumlah dari error dari waktu ke waktu dan member akumulasi offset yang seharusnya diperbaiki pada waktu sebelumnya seperti Persamaan 7. Secara terus menerus variabel integral akan mengurangi steady-state error, tetapi menyebabkan respon keadaan transient memburuk.
= ∫ ( ) (7)
7
berpengaruh meningkatkan kestabilan sistem dengan mengurangi nilai overshoot saat keadaan transient.
= ( ) (8)
Untuk mendapat respon sistem seperti yang diinginkan oleh pengguna bisa diatur nilai untuk , dan . Pada skripsi ini untuk menentukan nilai , dan digunakan metode trial and error.
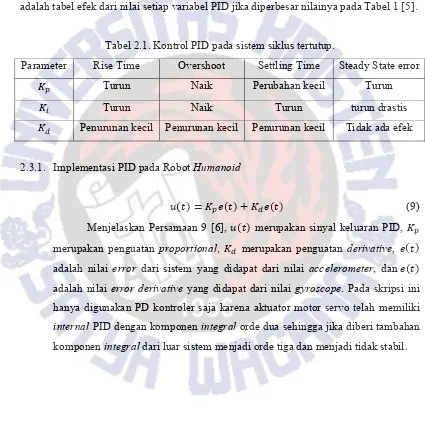
Setiap nilai , dan memiliki pengaruh pada keluaran sistem. Berikut adalah tabel efek dari nilai setiap variabel PID jika diperbesar nilainya pada Tabel 1 [5].
Tabel 2.1. Kontrol PID pada sistem siklus tertutup.
Parameter Rise Time Overshoot Settling Time Steady State error
Turun Naik Perubahan kecil Turun
Turun Naik Turun turun drastis
Penurunan kecil Penurunan kecil Penurunan kecil Tidak ada efek
2.3.1. Implementasi PID pada Robot Humanoid
( ) = ( ) + ( ) (9)
Menjelaskan Persamaan 9 [6], ( ) merupakan sinyal keluaran PID, merupakan penguatan proportional, merupakan penguatan derivative, ( )
adalah nilai error dari sistem yang didapat dari nilai accelerometer, dan ( )
8
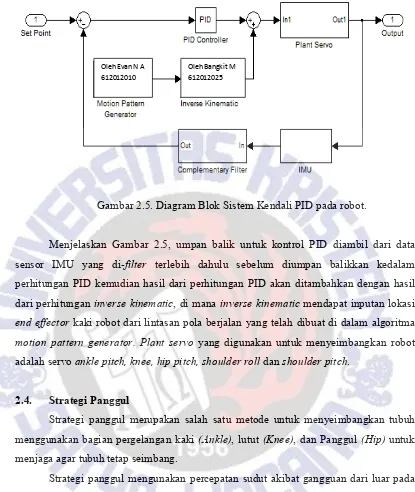
Gambar 2.5. Diagram Blok Sistem Kendali PID pada robot.
Menjelaskan Gambar 2.5, umpan balik untuk kontrol PID diambil dari data sensor IMU yang di-filter terlebih dahulu sebelum diumpan balikkan kedalam perhitungan PID kemudian hasil dari perhitungan PID akan ditambahkan dengan hasil dari perhitungan inverse kinematic, di mana inversekinematic mendapat inputan lokasi end effector kaki robot dari lintasan pola berjalan yang telah dibuat di dalam algoritma motion pattern generator. Plant servo yang digunakan untuk menyeimbangkan robot adalah servo ankle pitch, knee, hip pitch, shoulder roll dan shoulder pitch.
2.4. Strategi Panggul
Strategi panggul merupakan salah satu metode untuk menyeimbangkan tubuh menggunakan bagian pergelangan kaki (Ankle), lutut (Knee), dan Panggul (Hip) untuk menjaga agar tubuh tetap seimbang.
Strategi panggul mengunakan percepatan sudut akibat gangguan dari luar pada tubuh robot dan anggota badan untuk membuat gaya reaksi penolakan melawan gaya atau momen yang bekerja pada tubuh robot agar letak CoM pada robot ditarik kembali ke posisi tengah titik kestabilan [7].
Oleh Bangkit M 612012025 Oleh Evan N A
Menjelaskan Gambar
pusat massa sebesar θ akibat gaya atau momen yang ditunjuk
akan memberi gaya dorongan melawan arah gaya atau momen yang ditunjukan oleh panah merah dengan memberi nilai
ankle pitch dan knee, sedangkan motor servo pada bagian menyeimbangkan dan menarik letak dari
keseimbangan mengikuti arah gaya dari luar yang dirasakan oleh robot. Nilai yang diberikan motor servo didapat dari persamaan sebagai berikut :
Menjelaskan Persamaan adalah hasil perhitungan nilai perhitungan PID,
motor servo pada robot.
2.5. Strategi Rotasi L
Sistem pergerakan tubuh robot
pergerakan tubuh bagian atas menggunakan lengan, dan pergerakan tubuh bagian bawah yang menggunakan kaki. Untuk mempertahankan robot dalam kondisi seimbang atau stabil. Dalam kasus tertentu tidak memungkinkan untuk menyeimbangkan tubuh robot dengan menggunakan penggerak robot bagian bawah dikarenakan permukaan tempat robot menginjakan kaki terlalu bergelombang atau saat robot bertumpu pada satu kaki atau kondisi single support phase
digunakan untuk membantu kerj mempertahankan keseimbangan robot.
9
Gambar 2.6. Strategi Panggul.
Menjelaskan Gambar 2.6 strategi panggul, saat robot mengalami kemiringan akibat gaya atau momen yang ditunjukkan oleh panah biru, robot akan memberi gaya dorongan melawan arah gaya atau momen yang ditunjukan oleh panah merah dengan memberi nilai offset untuk menggerakan motor servo pada bagian
, sedangkan motor servo pada bagian hip
menyeimbangkan dan menarik letak dari CoM kembali ke posisi tengah titik keseimbangan mengikuti arah gaya dari luar yang dirasakan oleh robot. Nilai yang diberikan motor servo didapat dari persamaan sebagai berikut :
= ( + ( )) × pergerakan tubuh bagian atas menggunakan lengan, dan pergerakan tubuh bagian bawah yang menggunakan kaki. Untuk mempertahankan robot dalam kondisi seimbang atau stabil. Dalam kasus tertentu tidak memungkinkan untuk menyeimbangkan tubuh robot akan penggerak robot bagian bawah dikarenakan permukaan tempat robot menginjakan kaki terlalu bergelombang atau saat robot bertumpu pada satu kaki single support phase (SSP). Oleh karena itu strategi rotasi lengan digunakan untuk membantu kerja penggerak tubuh bagian bawah untuk mempertahankan keseimbangan robot.
strategi panggul, saat robot mengalami kemiringan an oleh panah biru, robot akan memberi gaya dorongan melawan arah gaya atau momen yang ditunjukan oleh
tuk menggerakan motor servo pada bagian hip digunakan untuk kembali ke posisi tengah titik keseimbangan mengikuti arah gaya dari luar yang dirasakan oleh robot. Nilai offset
(10) adalah nilai sudut total servo ke-n, , ( ) adalah hasil , dan n adalah nomor ID
Prinsip kerja strategi rotasi lengan pada robot
kerja pada sistem keseimbangan pada manusia, ketika manusia berdiri pada permukaan yang miring maka tangan
melawan arah kemiringan. Tujuan dari strategi ini adalah menciptakan momentum sudut dengan cara mendistribusikan massa dari lengan robot untuk menjaga letak dan CoP tetap berada pada daerah keseimbanga
sudut yang terjadi pada robot
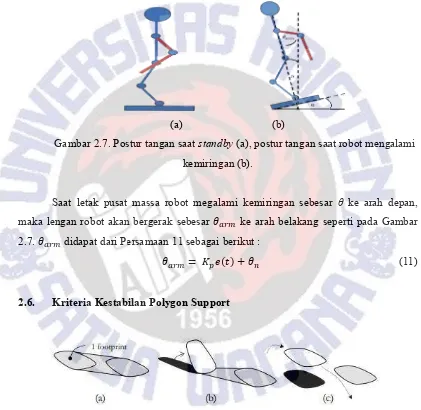
Gambar 2.7. Postur tangan saat
Saat letak pusat massa robot megalami kemiringan sebesar maka lengan robot akan bergerak sebesar
2.7. didapat dari Persamaan
2.6. Kriteria Kestabilan Polygon Support
Gambar 2.8. Jenis bentuk
Polygon Support
pada permukaan lapangan yang membent 10
Prinsip kerja strategi rotasi lengan pada robot humanoid sama
kerja pada sistem keseimbangan pada manusia, ketika manusia berdiri pada permukaan yang miring maka tangan akan secara otomatis menggerakan lengannya ke melawan arah kemiringan. Tujuan dari strategi ini adalah menciptakan momentum sudut dengan cara mendistribusikan massa dari lengan robot untuk menjaga letak
pada daerah keseimbangannya untuk mengimbangi momentum sudut yang terjadi pada robot [8].
(a) (b)
. Postur tangan saat standby (a), postur tangan saat robot mengalami kemiringan (b).
Saat letak pusat massa robot megalami kemiringan sebesar
maka lengan robot akan bergerak sebesar ke arah belakang seperti pada Gambar didapat dari Persamaan 11 sebagai berikut :
= ( ) +
Kestabilan Polygon Support
. Jenis bentuk polygon support, (a) dual support, (b) pre-swing dual support (c) single support.
Polygon Support merupakan daerah yang terbentuk dari kontak telapak kaki pada permukaan lapangan yang membentuk bentuk polygon seperti pada Gambar
sama dengan prinsip kerja pada sistem keseimbangan pada manusia, ketika manusia berdiri pada permukaan akan secara otomatis menggerakan lengannya ke atas melawan arah kemiringan. Tujuan dari strategi ini adalah menciptakan momentum sudut dengan cara mendistribusikan massa dari lengan robot untuk menjaga letak CoM
nnya untuk mengimbangi momentum
(a), postur tangan saat robot mengalami
Saat letak pusat massa robot megalami kemiringan sebesar θ ke arah depan, seperti pada Gambar
(11)
swing dual support,
[9]. Sistem keseimbangan pada robot vertical pada permukaan lapangan
support tersebut. Dalam pergerakan berjalan menjadi dua buah yaitu,
menapakan kaki pada lapangan (DSP), dan saat hanya satu kaki robot yang menapa kaki pada lapangan (SSP). Keseimbangan robot sangat bergantung pada area support ini, karena luas penampang kaki pada robot yang menapak pada lapa dalam menjaga kestabilan robot saat berjalan.
kumpulan gaya atau momentum yang bekerja pada robot. Pada skripsi ini untuk mendapat letak proyeks digunakan pemodelan pendulum terbalik linear.
Persamaan 12 dan 13
menggunakan pemodelan pendulum terbalik linear, sumbu x dan y adalah titik proyeksi
support yang terbentuk,
merupakan tinggi pusat massa robot, dan
(a) Gambar 2.9. Proyeksi
11
keseimbangan pada robot dikatakan stabil jika titik proyeksi pada permukaan lapangan dan titik CoP berada di dalam daerah
Dalam pergerakan berjalan robot humanoid, polygon
menjadi dua buah yaitu, polygon support yang terbentuk saat kedua kaki robot menapakan kaki pada lapangan (DSP), dan saat hanya satu kaki robot yang menapa kaki pada lapangan (SSP). Keseimbangan robot sangat bergantung pada area
, karena luas penampang kaki pada robot yang menapak pada lapa
kestabilan robot saat berjalan. Ankle berperan menahan dan menolak kumpulan gaya atau momentum yang bekerja pada robot.
Pada skripsi ini untuk mendapat letak proyeksi CoM secara digunakan pemodelan pendulum terbalik linear.
= ( | × sin |)
= ( | × sin |)
Persamaan 12 dan 13 merupakan titik proyeksi CoM pada menggunakan pemodelan pendulum terbalik linear, x adalah titik proyeksi
adalah titik proyeksi CoM pada sumbu y, p merupakan panjang yang terbentuk, l merupakan lebar polygon support yang terbentuk, merupakan tinggi pusat massa robot, dan θ adalah kemiringan pusat massa robot.
(b)
Proyeksi CoM ke dalam polygon support tampak samping (a), tampak atas (b).
R
L
l
dikatakan stabil jika titik proyeksi CoM secara dalam daerah polygon polygon support dibagi terbentuk saat kedua kaki robot menapakan kaki pada lapangan (DSP), dan saat hanya satu kaki robot yang menapakkan kaki pada lapangan (SSP). Keseimbangan robot sangat bergantung pada area polygon , karena luas penampang kaki pada robot yang menapak pada lapangan besar berperan menahan dan menolak
12