BAB III
PERANCANGAN ALAT
Pada bab ini akan dijelaskan mengenai perancangan dan realisasi dari perangkat keras, serta perangkat lunak dari alat peraga sistem pengendalian ketinggian air.
3.1. Gambaran Alat
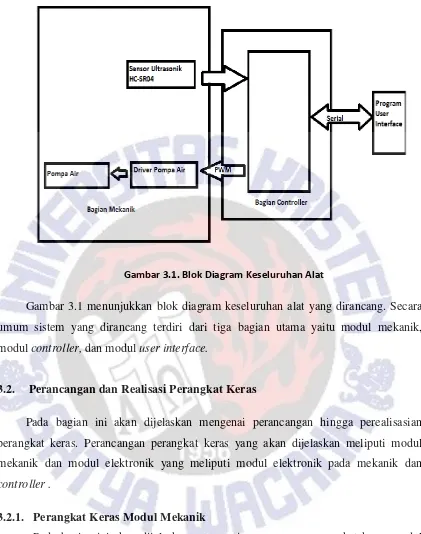
Gambar 3.1. Blok Diagram Keseluruhan Alat
Gambar 3.1 menunjukkan blok diagram keseluruhan alat yang dirancang. Secara umum sistem yang dirancang terdiri dari tiga bagian utama yaitu modul mekanik, modul controller, dan modul user interface.
3.2. Perancangan dan Realisasi Perangkat Keras
Pada bagian ini akan dijelaskan mengenai perancangan hingga perealisasian perangkat keras. Perancangan perangkat keras yang akan dijelaskan meliputi modul mekanik dan modul elektronik yang meliputi modul elektronik pada mekanik dan
controller.
3.2.1. Perangkat Keras Modul Mekanik
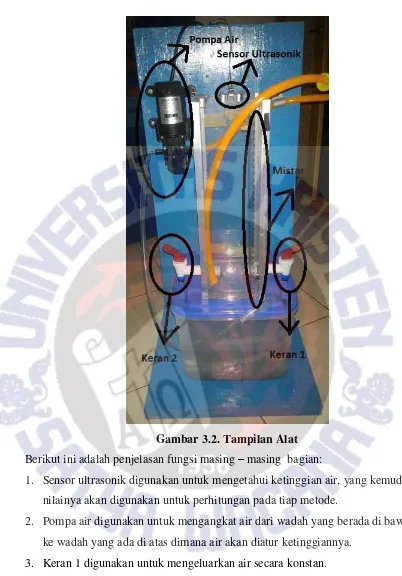
Gambar 3.2. Tampilan Alat Berikut ini adalah penjelasan fungsi masing – masing bagian:
1. Sensor ultrasonik digunakan untuk mengetahui ketinggian air, yang kemudian nilainya akan digunakan untuk perhitungan pada tiap metode.
2. Pompa air digunakan untuk mengangkat air dari wadah yang berada di bawah ke wadah yang ada di atas dimana air akan diatur ketinggiannya.
3. Keran 1 digunakan untuk mengeluarkan air secara konstan. 4. Keran 2 digunakan sebagai simulasi gangguan.
3.2.2. Perangkat Keras Modul Elektronik
3.2.2.1. Pengendali Utama
Pengendali utama bertugas untuk mendapatkan data sensor, mengkonversi data sensor ke jarak, melakukan proses pengendalian(on – off, PID, dan Fuzzy), mengatur pwm pompa air, serta melakukan komunikasi melalui serial dengan program user interface pada PC/laptop baik mengirim data yang akan di-plot oleh program user interface, ataupun menerima perintah dari program user interface dan melakukan
update setpoint, metode kendali yang digunakan, dan parameter Kp, Ki, Kd untuk metode kendali PID .
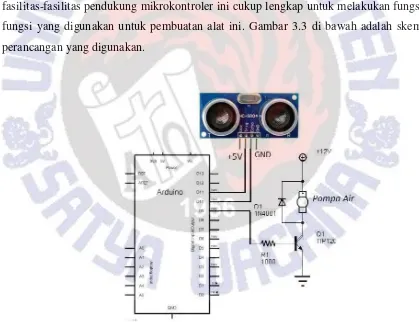
Bagian ini dirancang berbasis mikrokontroler sebagai pusat pengolahan data dan sebagai pengontrol bagian-bagian lainnya, mikrokontroler yang digunakan dalam perancangan ini adalah mikrokontroler Arduino Uno. Arduino Uno dipilih karena fasilitas-fasilitas pendukung mikrokontroler ini cukup lengkap untuk melakukan fungsi-fungsi yang digunakan untuk pembuatan alat ini. Gambar 3.3 di bawah adalah skema perancangan yang digunakan.
Tabel 3.1 di bawah ini menunjukkan pin Arduino yang dipakai : Tabel 3.1. Konfigurasi penggunaan pin Arduino
Nama pin Keterangan
Pin vcc 5v Digunakan sebagai sumber tegangan dari sensor ultrasonik
Pin ground Digunakan sebagai ground sensor ultrasonik Pin no. 9 Terhubung dengan driver pompa air
Pin no. 12 Terhubung dengan pin trigger pada sensor ultrasonic Pin no. 11 Terhubung dengan pin echo pada sensor ultrasonic
3.2.2.2. Sensor Ultrasonik HC-SR04
Untuk mendeteksi ketinggian air digunakan sensor ultrasonic SR04. HC-SR04 adalah sensor yang mendeteksi jarak obyek melalui pantulan suara dan output
keluarannya waktu pantulan suara tersebut.
HC-SR04 mempunyai tegangan kerja 4.5 V sampai 5.5 V dan mempunyai arus kerja 2 mA. Sensor ini mampu mendeteksi jarak obyek dari 2 cm hingga 500 cm, dengan sudut efektif saat mengukur jarak adalah sebesar < 15 derajat dengan resolusi 0.3 cm.
Dalam realisasi perancangan alatsensor HC-SR04 diberi catu tegangan 5V untuk mendeteksi ketinggian air pada wadah air yang dipasang di atas wadah. Untuk mendapatkan data ketinggian air dilakukan proses konversi ke satuan cm.
3.2.2.3.Aktuator
Aktuator yang digunakan pada alat ini adalah sebuah pompa air yang dicatu dengan tegangan sebesar 12 V. Pompa air ini memiliki arus kerja 2.1 A dan dapat mengangkat air sebanyak 3.1 liter per menit.
3.3. Perancangan dan Realisasi Perangkat Lunak
3.3.1. Perangkat Lunak Microcontroller
Pada bagian ini akan dijelaskan mengenai perancangan perangkat lunak
microcontroller yang meliputi bagian controller, bagian pengiriman data ke user interface, dan bagian penerimaan data (updater)dari user interface.
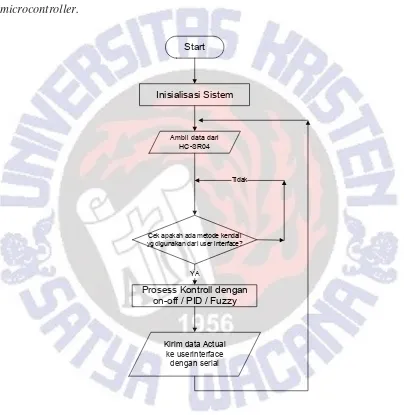
Gambar 3.4 menunjukkan diagram alir progam yang diimplementasikan pada
microcontroller.
Start
Inisialisasi Sistem
Ambil data dari HC-SR04
Cek apakah ada metode kendali yg digunakan dari user interface? Tidak
Prosess Kontroll dengan on-off / PID / Fuzzy
YA
Kirim data Actual ke userinterface
dengan serial
Gambar 3.4. Diagram alir Sistem pada Microcontroller
Inisialisasi sistem yang meliputi parameter PID yang digunakan Kp, Ki,
Kd, dan setpoint yang diambil dari EEPROM, serta inisialisasi Timer yang digunakan untuk pewaktuan time sampling PID dilakukan.
Diambil data dari sensor HC-SR04 yang berupa waktu dalam mikrodetik yang kemudian akan di konversi ke satuan cm
Sistem akan melakukan cek metode kendali yang digunakan, sistem akan
menerima data dari user interface dan kemudian akan melakukan perhitungan bedasarkan metode tersebut.Pada bagian penerimaan data ini terdapat 5 data yang dikirimkan dari user interface yaitu setpoint, Kp, Ki,
Kd, dan mode kendali yang digunakan.
Jika metode on – off yang dipilih maka hanya akan terjadi 2 kondisi yaitu on saat nilai aktual < setpoint dan off saat nilai aktual > setpoint
Jika metode PID yang dipilih maka akan dilakukan kalkulasi PID dan
dilakukan penghitungan error, yaitu error = set point - aktual. Kemudian
error yang didapatkan digunakan untuk menghitung u(t), sehingga
didapatkan u(t) = Kp error + Ki sum of error + Kd (error – last error). Jika metode Fuzzy yang dipilih maka akan dibuat himpunan – himpunan
fuzzy seperti pada Gambar 3.11 di bawah. Himpunan input adalah
himpunan error yang dibagi menjadi 4 himpunan yaitu untuk error kecil sekali, error kecil, error besar, dan error besar sekali. Proses perhitungan
fuzzy dilakukan berdasarkan metode fuzzy yang diterapkan oleh Sugeno. Dipilih metode Sugeno karena metode ini karena perhitungan lebih efisien(output sistem berupa himpunan tegas bukan himpunan fuzzy).
µ(error)
Kecil Sekali Kecil Besar Besar Sekali
-0. 3 1 2 3 4 5
Kemudian akan dilakukan perhitungan derajat keanggotaan masing – masing himpunan tersebut.Perhitungan dilakukan seperti di bawah: 1. Himpunan error kecil sekali mengatur kecepatan pompa air, nilai tersebut adalah nilai PWM sebagai berikut:
Kecil sekali = nilai PWM 70 Kecil = nilai PWM 180 Besar = nilai PWM 200 Besar Sekali = nilai PWM 255
Kemudian dilakukan proses defuzzyfikasi dengan menggunakan rumus
rata-rata berbobot yaitu
=
∑�=∑ �. ���=
dimana:
n=jumlah data
Xi=data ke i
Berdasarkan perancangan fuzzy diatas maka jika seandainya error adalah
0.9 maka ia akan berada diantara 2 himpunan yaitu kecil sekali dan kecil maka akan dilakukan perhitungan derajat keanggotaan untuk himpunan kecil sekali dan kecil .
Untuk himpunan kecil sekali maka nilai derajat keanggotaannya adalah (1-0.9)/1.3 dan di dapat nilai 0.076.
Untuk himpunan kecil maka nilai derajat keanggotaannya adalah (0.9+0.3)/1.3 dan di dapat nilai 0.924.
Maka akan dilakukan proses defuzzifikasi untuk menentukan nilai PWM seperti dibawah:
� = . × + .. ×+ . + ×+ + + ×
= .
Maka nilai PWM saat error 0.9 adalah 171.64
Terdapat 7 data yang dikirimkan ke user interface yaitu nilai setpoint,
sensor, output pwm, Kp, Kd ,Ki, dan error, data tersebut dikirim dalam bentuk string yang diakhiri dengan pergantian baris untuk memudahkan dibaca di program user interface
3.3.2. Perangkat Lunak User interface
Pada bagian ini akan dijelaskan mengenai perancangan aplikasi desktop yang digunakan sebagai program user interface yang meliputi cara kerja program user inteface dan penjelasan tampilan program user inteface.
3.3.2.1.Cara kerja program user interface
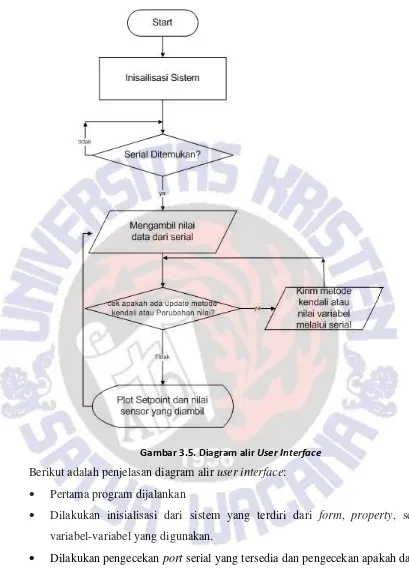
Gambar 3.5. Diagram alir User Interface
Berikut adalah penjelasan diagram alir user interface:
Pertama program dijalankan
Dilakukan inisialisasi dari sistem yang terdiri dari form, property, serta variabel-variabel yang digunakan.
Dilakukan pengecekan port serial yang tersedia dan pengecekan apakah dapat
digunakan untuk komunikasi serial atau tidak. Jika port serial tidak ditemukan maka akan dilakukan pengecekan lagi. Jika port serial telah ditemukan kemudian dilakukan pengambilan data dari serial
Dilakukan pengecekan apakah ada penekanan tombol update pada user
update nilai ataupun metode kendali program akan melakukan plot nilai
setpoint dan ketinggian air
3.3.2.2. Penjelasan Tampilan Program User Interface
Program user interface digunakan untuk mengatur metode kendali yang digunakan dalam sistem , mengatur setpoint sesuai yang diinginkan, menampilkan plot
ketinggian air dan setpoint yang dikehendaki user, serta mengubah nilai Kp, Ki, Kd
untuk metode kendali PID. Perancangan aplikasi tersebut dilakukan menggunakan software Processing.
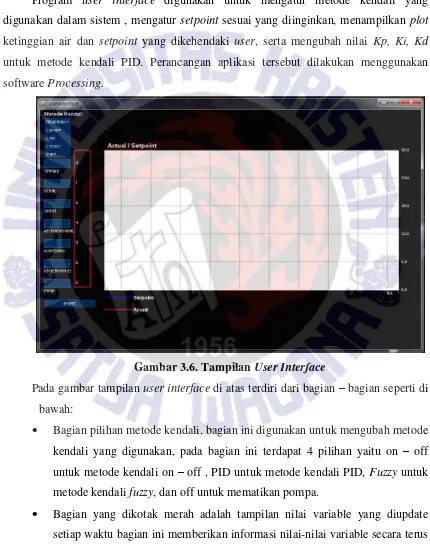
Gambar 3.6. Tampilan User Interface
Pada gambar tampilan user interface di atas terdiri dari bagian – bagian seperti di bawah:
Bagian pilihan metode kendali, bagian ini digunakan untuk mengubah metode
kendali yang digunakan, pada bagian ini terdapat 4 pilihan yaitu on – off untuk metode kendali on – off , PID untuk metode kendali PID, Fuzzy untuk metode kendali fuzzy, dan off untuk mematikan pompa.
Text box digunakan untuk memasukkan atau mengubah data dari user
interface. Cara mengubah nilai adalah dengan memasukkan nilai yang
diinginkan dan menekan tombol update
Tombol update digunakan untuk mengirimkan data baik yang ada di text box