Informasi Dokumen
- Penulis:
- Veronica Dwiandari S.
- Pengajar:
- Dr. Budi Hartanto S., Ir., M.Sc.
- Sekolah: Universitas Kristen Maranatha
- Mata Pelajaran: Teknik Sipil
- Topik: Perancangan Geometrik Jalan Menggunakan Software Autodesk Land Desktop 2006
- Tipe: tugas akhir
- Tahun: 2006
- Kota: Bandung
Ringkasan Dokumen
I. PENDAHULUAN
Bagian pendahuluan menjelaskan latar belakang pentingnya perancangan geometrik jalan, yang berfokus pada penyediaan pelayanan optimal untuk arus lalu lintas. Dalam konteks pendidikan, bagian ini memberikan pemahaman dasar kepada mahasiswa tentang pentingnya desain jalan yang efisien dan efektif. Melalui pemahaman ini, mahasiswa dapat mengaplikasikan teori-teori yang telah dipelajari dalam praktik nyata, serta memahami tantangan yang dihadapi dalam perancangan jalan secara manual dan bagaimana teknologi dapat membantu mengatasinya.
1.1 Latar Belakang
Latar belakang menjelaskan permasalahan yang sering muncul dalam perancangan geometrik jalan secara manual, seperti kesalahan manusia dan waktu yang dibutuhkan. Hal ini menjadi penting bagi mahasiswa untuk memahami konteks di mana mereka akan menerapkan ilmu yang mereka pelajari. Dengan memahami permasalahan ini, mahasiswa diharapkan dapat merancang solusi yang lebih baik dalam proyek-proyek mereka di masa depan.
1.2 Tujuan
Tujuan dari penelitian ini adalah untuk menganalisis dan membandingkan perhitungan geometrik jalan menggunakan metode manual dan software Autodesk Land Desktop 2006. Ini memberikan mahasiswa pemahaman tentang perbedaan metode, serta kelebihan dan kekurangan masing-masing. Dengan demikian, mahasiswa dapat memilih metode yang paling sesuai untuk digunakan dalam proyek mereka.
1.3 Batasan Masalah
Batasan masalah membantu mahasiswa untuk memahami ruang lingkup penelitian ini, yaitu fokus pada perancangan geometrik jalan dengan menggunakan software tertentu. Hal ini penting agar mahasiswa dapat mengaplikasikan pengetahuan mereka dalam batasan yang telah ditentukan, serta menghindari kebingungan yang mungkin timbul dari topik yang terlalu luas.
1.4 Sistematika Penulisan
Sistematika penulisan memberikan panduan kepada mahasiswa tentang bagaimana laporan ini disusun. Ini akan membantu mereka dalam menyusun laporan akademik mereka sendiri di masa depan, serta memahami struktur yang baik dalam penulisan ilmiah.
II. STUDI PUSTAKA
Bagian ini membahas teori-teori yang mendasari perancangan geometrik jalan, termasuk definisi, klasifikasi jalan, dan parameter yang mempengaruhi desain. Ini sangat relevan untuk tujuan pendidikan, karena memberikan mahasiswa landasan teori yang kuat sebelum mereka terjun ke dalam praktik. Mahasiswa diharapkan dapat mengaitkan teori dengan praktik di lapangan, serta memahami bagaimana berbagai faktor mempengaruhi desain geometrik jalan.
2.1 Dasar Perancangan Geometrik Jalan
Bagian ini menjelaskan definisi dan klasifikasi jalan berdasarkan berbagai kriteria. Pemahaman ini penting bagi mahasiswa untuk mengidentifikasi jenis jalan yang sesuai dengan konteks proyek mereka. Dengan demikian, mereka dapat merancang jalan yang memenuhi standar dan kebutuhan pengguna.
2.2 Kecepatan Rencana
Kecepatan rencana merupakan faktor penting dalam perancangan geometrik jalan. Mahasiswa belajar bagaimana kecepatan mempengaruhi desain jalan, termasuk radius tikungan dan panjang lengkung. Ini memberikan wawasan praktis yang dapat diterapkan dalam proyek mereka.
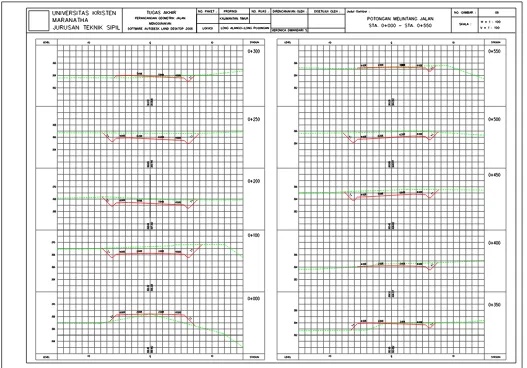
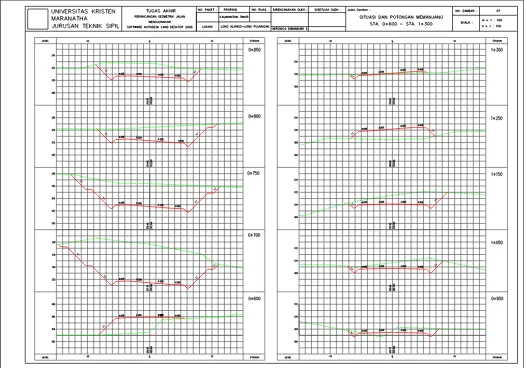
2.3 Penampang Melintang Jalan
Penampang melintang jalan adalah aspek penting dalam desain geometrik. Mahasiswa belajar tentang berbagai elemen penampang, seperti jalur dan bahu jalan, yang harus diperhatikan dalam perancangan. Ini membantu mereka memahami bagaimana desain mempengaruhi keselamatan dan kenyamanan pengguna jalan.
2.4 Alinyemen Horizontal
Bagian ini membahas alinyemen horizontal, termasuk koefisien gesekan dan lengkung peralihan. Mahasiswa diharapkan dapat menerapkan teori ini dalam desain jalan yang lebih kompleks, serta memahami bagaimana faktor-faktor ini mempengaruhi keselamatan dan kenyamanan berkendara.
2.5 Alinyemen Vertikal
Alinyemen vertikal mencakup perhitungan kelandaian dan lengkung vertikal. Mahasiswa belajar untuk merancang elemen-elemen ini agar sesuai dengan standar keselamatan. Ini memberikan mereka keterampilan praktis yang dapat diterapkan dalam proyek nyata.
2.6 Stasioning
Stasioning adalah penting untuk menentukan posisi dan panjang jalan. Mahasiswa belajar tentang cara menghitung stasioning yang tepat, yang sangat penting dalam perancangan jalan yang akurat.
2.7 Rambu Lalu Lintas
Rambu lalu lintas adalah elemen penting dalam desain jalan. Mahasiswa diharapkan memahami bagaimana rambu-rambu ini berfungsi dan bagaimana mereka dapat mempengaruhi perilaku pengemudi. Ini adalah aspek penting dalam meningkatkan keselamatan jalan.
2.8 Kriteria Perancangan AASHTO 2001
Kriteria perancangan AASHTO 2001 memberikan pedoman bagi mahasiswa untuk merancang jalan yang aman dan efisien. Dengan memahami kriteria ini, mahasiswa dapat memastikan bahwa desain mereka memenuhi standar yang ditetapkan.
2.9 Program Autodesk Land Desktop versi 2006
Bagian ini memperkenalkan software Autodesk Land Desktop 2006 dan fungsinya dalam perancangan geometrik jalan. Mahasiswa diharapkan dapat menggunakan software ini dalam proyek mereka, meningkatkan efisiensi dan akurasi desain.
2.10 Konsep Dasar Program Autodesk Land Desktop 2006
Konsep dasar software ini mencakup fitur-fitur penting yang mendukung perancangan geometrik. Mahasiswa belajar bagaimana menggunakan fitur-fitur ini untuk meningkatkan kualitas desain mereka.
2.11 Tahapan Perancangan Jalan Menggunakan Autodesk Land Desktop 2006
Tahapan ini memberikan panduan langkah demi langkah dalam menggunakan software. Mahasiswa diharapkan dapat mengikuti tahapan ini untuk mencapai hasil yang diinginkan dalam perancangan mereka.
III. METODOLOGI PENELITIAN
Metodologi penelitian menjelaskan langkah-langkah yang diambil dalam penelitian ini, termasuk pengumpulan data dan analisis. Ini memberikan mahasiswa pemahaman tentang bagaimana penelitian dilakukan secara sistematis, dan pentingnya metodologi yang baik dalam mencapai hasil yang valid. Mahasiswa diharapkan dapat menerapkan metodologi ini dalam penelitian mereka sendiri di masa depan.
3.1 Program Rencana Kerja
Program rencana kerja membantu mahasiswa memahami bagaimana merencanakan dan mengorganisir proyek penelitian. Ini penting untuk memastikan bahwa semua aspek penelitian diperhatikan dan dikelola dengan baik.
3.2 Identifikasi Masalah dan Tujuan
Identifikasi masalah dan tujuan penelitian adalah langkah penting dalam metodologi. Mahasiswa diharapkan dapat mengidentifikasi masalah yang relevan dan menetapkan tujuan penelitian yang jelas.
3.3 Pengumpulan Data
Bagian ini menjelaskan metode pengumpulan data yang digunakan dalam penelitian. Mahasiswa belajar tentang pentingnya pengumpulan data yang akurat dan relevan untuk mendukung hasil penelitian.
3.4 Pengolahan Data
Pengolahan data mencakup analisis data yang telah dikumpulkan. Mahasiswa diharapkan dapat menggunakan teknik analisis yang tepat untuk mendapatkan hasil yang valid dan dapat diandalkan.
3.5 Analisis dan Pembahasan
Analisis dan pembahasan adalah tahap penting dalam penelitian. Mahasiswa belajar bagaimana menginterpretasikan hasil dan mendiskusikan implikasi dari temuan mereka.
IV. PENGUMPULAN DATA DAN ANALISIS
Bagian ini menyajikan hasil pengumpulan dan analisis data. Ini memberikan mahasiswa kesempatan untuk melihat aplikasi nyata dari teori yang telah mereka pelajari. Dengan memahami bagaimana data dikumpulkan dan dianalisis, mahasiswa dapat mengembangkan keterampilan praktis yang diperlukan dalam bidang teknik sipil.
4.1 Lokasi Penelitian
Lokasi penelitian memberikan konteks bagi mahasiswa tentang di mana dan mengapa penelitian ini dilakukan. Memahami lokasi yang dipilih sangat penting untuk memahami hasil yang diperoleh.
4.2 Hasil Pengumpulan dan Pengolahan Data
Hasil pengumpulan data memberikan informasi konkret yang dapat digunakan untuk analisis. Mahasiswa belajar bagaimana menginterpretasikan hasil ini untuk mendukung kesimpulan mereka.
4.3 Perancangan Menggunakan Metoda Perhitungan Manual
Bagian ini menjelaskan bagaimana perancangan dilakukan menggunakan metode manual. Mahasiswa diharapkan dapat membandingkan hasil ini dengan hasil yang diperoleh dari software.
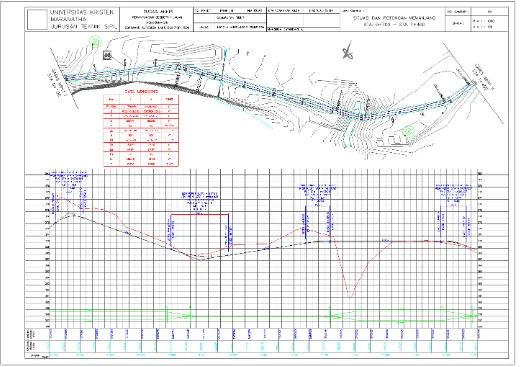
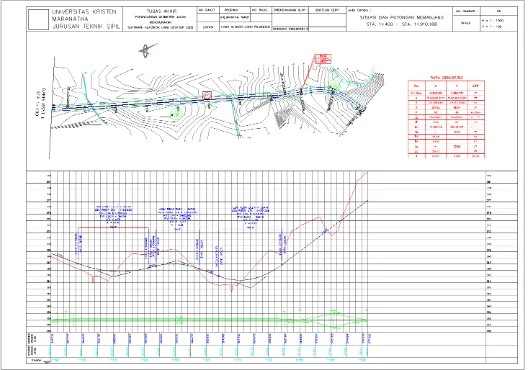
4.4 Perancangan Menggunakan Software Autodesk Land Desktop
Perancangan menggunakan software memberikan mahasiswa pemahaman tentang bagaimana teknologi dapat meningkatkan efisiensi dan akurasi. Ini adalah keterampilan penting yang harus dimiliki oleh insinyur sipil modern.
4.5 Pembahasan Hasil Analisis Perhitungan
Pembahasan hasil analisis memberikan mahasiswa kesempatan untuk mendiskusikan temuan mereka. Ini penting untuk mengembangkan kemampuan analitis dan kritis yang diperlukan dalam bidang teknik.
V. KESIMPULAN DAN SARAN
Kesimpulan merangkum temuan utama dari penelitian, sementara saran memberikan rekomendasi untuk penelitian lebih lanjut. Ini membantu mahasiswa untuk memahami pentingnya refleksi dan pengembangan berkelanjutan dalam bidang teknik sipil.
5.1 Kesimpulan
Kesimpulan memberikan ringkasan dari hasil penelitian dan implikasinya. Mahasiswa diharapkan dapat menarik kesimpulan yang valid berdasarkan data yang telah dianalisis.
5.2 Saran
Saran memberikan panduan untuk penelitian di masa depan. Mahasiswa belajar tentang pentingnya mengidentifikasi area yang perlu diteliti lebih lanjut untuk meningkatkan pemahaman dalam bidang ini.
Referensi Dokumen
- A Policy on Geometric Design of Highways and Streets ( American Association of State Highways and Transportation officials )
- Tata Cara Perencanaan Geometrik Jalan Antar Kota ( Direktorat Jenderal Bina Marga )
- Perencanaan Teknik Jalan Raya ( Hendarsin, S.L. )
- Perancangan Geometrik Jalan Dengan Menggunakan Program Bentley MX Road ( Rhamanda, R. )
- Konstruksi Jalan Raya Geometrik Jalan ( Saodang, H. )