PERENCANAAN GERAK ROBOT HEXAPOD
Adithya Pratama
Program Studi Sistem Komputer, Universitas Bina Nusantara, [email protected]
Alfred Junus Verdio Manalu
Program Studi Sistem Komputer, Universitas Bina Nusantara, [email protected]
Dwi Sagesti Saputri
Program Studi Sistem Komputer, Universitas Bina Nusantara, [email protected]
Rudy Susanto
Program Studi Sistem Komputer, Universitas Bina Nusantara, [email protected]
ABSTRAK
Hexapod telah menjadi bagian dari kategori robot berkaki pada perlombaan Kontes Robot Cerdas Indonesia (KRCI), yang diadakan oleh Departemen Pendidikan Nasional. Dalam konstes tersebut robot diperlombakan didalam sebuah track berupa ruangan dan lorong. Prototype Hexapod yang digunakan menggunakan modul utama Arduino yang berfungsi sebagai penerima input dari sensor ultrasonic dan mengirim data ke modul SSC32 yang akan menggerakkan servo berdasarkan data yang ditentukan. Prototype Hexapod ini berdasarkan penilitian sebelumnya yang dibuat oleh Iqbal, et all, 2011 yang berjudul Pengembangan Gait Mobile Robot Tipe Hexapod Melewati rintangan. Pengembangan dilakukan dengan penambahan sensor dari segi perangkat keras dan penggunaan modul Arduino. Pengujian gait Tripod, Wave, Ripple dalam pengujian kecepatan pada jarak 1 meter dan 50 cm untk ripple gait. yang memiliki hasil Wave 122 detik dengan kecepatan rata-rata 0,008 m/s , Ripple 63 detik dengan jarak 50 cm dan kecepatan rata-rata 0,007 m/s dan tripod 27 detik dengan jarak 1 meter dan kecepatan rata-rata 0,03 m/s. Sehingga dari hasil yang didapat, percobaan menggunakan gait tripod pada Hexapod pada sample lorong terjauh dari track KRCI, yakni pada lorong sepanjang 244cm dengan lebar 46cm, waktu yang dicapai 74 detik dan kecepatan rata-rata 0,02 m/s dan memiliki keberhasilan sampai dengan tujuan 100%.
PENDAHULUAN
Hexapod adalah robot, termasuk dalam kategori robot berkaki dengan jumlah kaki sebanyak 6
tungkai. Hexapod masuk kedalam kategori robot berkaki untuk perlombaan Kontes Robot Cerdas Indonesia (KRCI), yang diadakan oleh Depdiknas. Dalam kontes tersebut, robot Hexapod akan menyusuri track KRCI yang menyerupai lorong – lorong , dimana robot bertugas memadamkan api pada salah satu ruang atau disebut juga home dalam track.
Penelitian robot berkaki pernah dilakukan oleh mahasiswa Universitas Binus yaitu Jati, et al, 2007. Penelitian tersebut menambah tingkat kecepatan dan kestabilan pada robot bekaki empat (Quadpod) serta ditambahkannya sebuah device dengan interface bluetooth untuk membuat gait baru tanpa harus melakukan programming ulang. Penelitian dilanjutkan kembali oleh Ferdi, et al, 2010 yaitu penelitian robot berkaki empat untuk menaiki tangga. Lalu penelitian selanjutnya dilakukan oleh Iqbal, et al, 2011 Penelitian tersebut merupakan penelitian pertama robot berkaki enam di Universitas Binus.
Penelitian yang serupa dilakukan oleh Danang Yufan Habibi, 2011 yang membahas perancangan gaya berjalan robot menggunakan metode inverse kinematic. Dan penelitian yang dilakukan oleh Tareq Mamkegh, 2011 yang membahas mengenai perancangan gerak robot hexapod.
Penelitian oleh Lewinger et al, 2011 yang membahas mengenai desain robot hexapod 3 DOF yang merancang sudut pada sendi, lokasi kaki, pergerakkan robot dimana membandingkan antara performa pergerakkan robot dengan serangga. Selanjutnya penelitian oleh Manuel F. Silva, 2003 mengenai perancangan gerak robot hexapod dengan menganalisa dinamika pada robot dalam menghasilkan gaya berjalan. Dan penelitian oleh Jin Bo et al, 2011 membahas mengenai analisa gaya berjalan tripod pada robot yang direpresentasikan oleh perencanaan trajektori sendi.
Maka dari itu perencanaan gerak pada robot Hexapod, yang menjadi tema kami mengacu pada perancangan gerak robot, dan pemilihan gait yang baik untuk digunakan dalam berjalan serta pengaruh kegunaan sensor ultrasonik yang kami sematkan sebagai sensor pendeteksi halangan. Halang rintang kami fokuskan pada tembok pembatas.
Tujuan penelitian ini adalah merancang prototipe robot Hexapod dalam melakukan gerakan dasar dalam bergerak maju pada lorong terpanjang track KRCI dengan spesifikasi track, panjang 244 cm, lebar 46 cm, dan tinggi dinding 30 cm.
Robot Hexapod adalah robot yang bergerak dengan menggunakan 6 buah kaki. Karena robot secara statis dapat stabil dengan menggunakan 3 kaki atau lebih, maka robot hexapod mempunyai fleksibilitas yang tinggi. Jika ada kaki yang tidak berfungsi, maka ada kemungkinan robot masih dapat berjalan. Terlebih lagi tidak semua kaki robot dibutuhkan untuk mencapai stabilitas, kaki lainnya dapat bergerak bebas untuk mencari tempat pijakan baru.
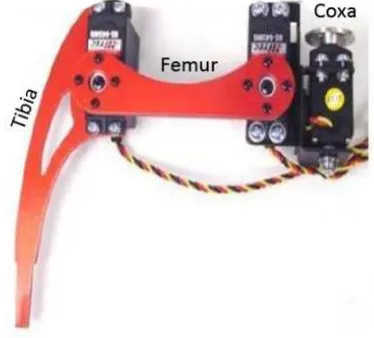
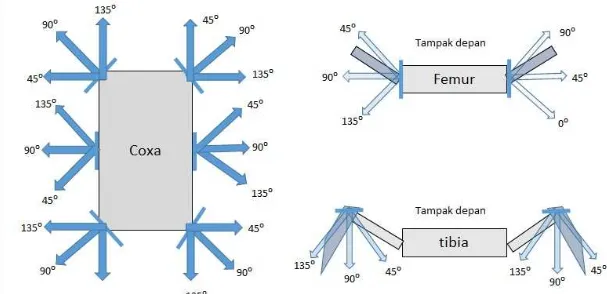
Robot hexapod memiliki dua bagian yaitu bagian tubuh dan bagian kaki, dan memiliki tiga derajat kebebasan (3 DOF) yang dibentuk oleh tiga sendi pada kaki, yaitu coxa, femur, dan tibia seperti pada gambar 1. Setiap sendi pada kaki robot hexapod direpresentasikan oleh satu buah motor servo DC analog 180 . Motor adalah sebuah motor elektris bertenaga AC (alternating current) atau DC (direct current), yang berperan sebagai bagian pelaksana dari perintah – perintah yang diberikan oleh otak robot. Berdasarkan fungsinya, terdapat beberapa macam motor yang biasa digunakan pada robot, yaitu motor DC untuk aplikasi yang membutuhkan kecepatan tinggi, motor stepper untuk aplikasi dengan akurasi tinggi, dan motor servo untuk gerakan-gerakan berupa gerakan sudut.
Dalam dunia robotika tidak luput dari sebuah sistem kontrol. Terdapat dua buah sistem kontrol yaitu open loop system dan close loop system. Open loop system merupakan sistem control terbuka dimana pada sistem ini tidak memberi umpan balik dari keluran ke masukannya atau nilai keluarannya tidak diperhitungakan ulang oleh pengendali. Berikut diagram open loop system.
Gambar 2. Diagram Blok Open Loop System
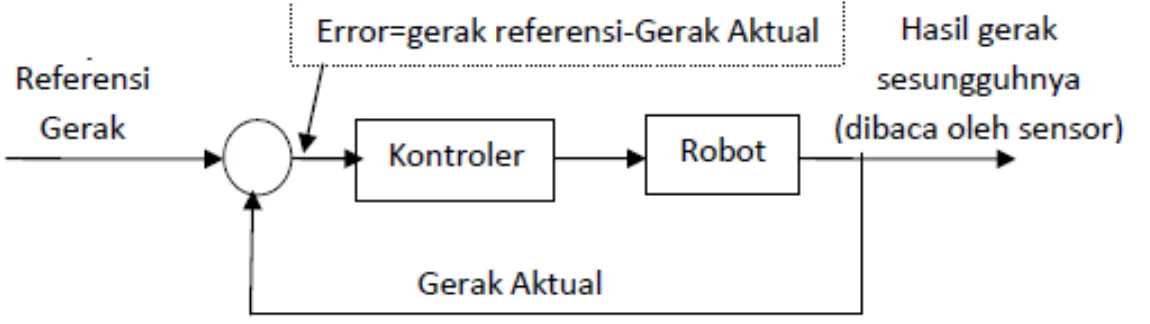
Sementara close loop system adalah sistem kontrol yang memberi umpan balik ke masukan sehingga nilai keluarannya diperhitungakan kembali oleh pengendali. Sistem kontrol close loop ini banyak dijumpai pada sistem yang bersifat otomasi. Berikut diagram close loop system.
Gambar 3. Diagram Blok Close Loop System
Gait merupakan pola pergerakan sendi, baik itu pada hewan maupun manusia. Gait pada hewan
terbentuk berdasarkan kebutuhan akan kecepatan gerak, kondisi habitat, pergerakan (maneuver), dan pemakaian energi yang efisien. Pada robot berkaki, ada beberapa pilihan kombinasi gait , yaitu gait untuk dua kaki (Bipedal), empat kaki (Quadrapod), atau enam kaki (Hexapod).
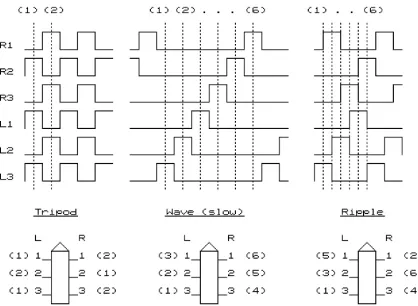
Pada robot hexapod terdapat tiga gait dasar yaitu wave, ripple, dan tripod gait. Wave merupakan
gait dimana robot berjalan dengan mengangkat satu kaki dan lima kaki sisanya menjejak pada tanah. Wave gait merupakan gait yang memiliki waktu paling lama akan tetapi paling stabil. Ripple gait merupakan gait
dimana robot berjalan dengan mengangkat dua kaki dan empat kaki sisanya menjejak pada tanah. Dan yang terakhir adalah tripod, tripod merupakan gait dimana robot berjalan dengan mengangkat tiga kaki dan tiga kaki sisanya menjejak pada tanah. Tripod gait merupkan gait tercepat. Berikut ilustrasi pergerakkan gait pada robot hexapod.
Gambar 4. Ilustrasi Gaya Berjalan Robot
METODE PENELITIAN
Metode yang dilakukan adalah merancang robot hexapod dengan menggunakan motor servo DC sebagai penggerak setiap sendinya, menggunakan SSC 32 sebagai servo controller, dan menggunakan arduino UNO R3 sebagai pengendali dari sistem robot ini. Sensor yang digunakan pada robot ini adalah tiga buah sensor PING ultrasonic untuk mendeteksi adanya benda padat. Berikut digram blok sistem robot pada gambar 5.
Gambar 5. Diagram Blok
Diagram blok pada gambar 5 menjelaskan hubungan antar komponen pada robot hexapod ini. Tiga buah sensor PING berperan sebagai input pada Arduino UNO R3, lalu Arduino UNO R3 memberi perintah ke SSC 32 servo controller sebagai modul pengendali servo, lalu SSC 32 akan menggerakkan 18 buah motor servo. Berikut diagram alir sistem robot hexapod pada gambar 6.
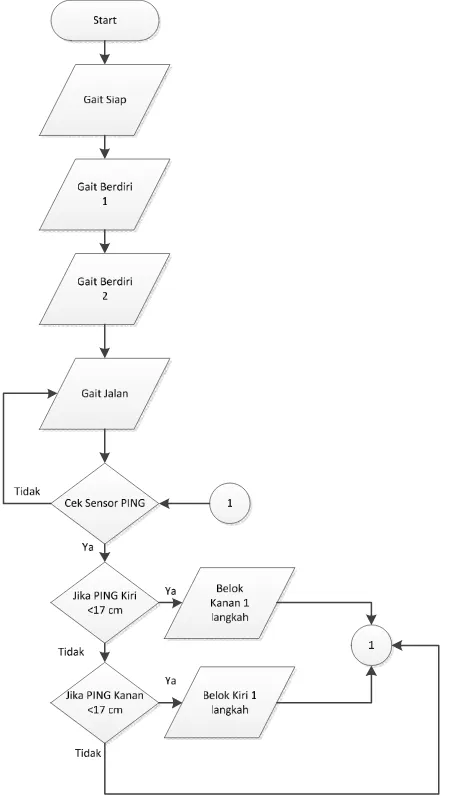
Gambar 6. Diagram Alir
Start merupakan kondisi saat robot aktif, selanjutnya robot akan menerima perintah untuk gait siap lalu berdiri, perbedaan berdiri 1 dan berdiri 2 hanya pada ketinggian, berdiri 2 lebih tinggi dari berdiri 1. Lalu robot berjalan melangkah ke depan lalu sensor PING melakukan pengecekkan rintangan, apabila tidak
mendeteksi rintangan maka robot kembali melangkah ke depan, jika mendeteksi adanya rintangan, maka sensor PING kiri dan kanan akan melakukan pengecekkan. Jika PING kiri kurang dari 17 cm, maka robot berbelok ke kanan sebanyak satu langkah lalu kembali lagi melakukan pendeteksian rintangan. Apabila PING kiri tidak mendeteksi rintangan kurang dari 17 cm, maka PING kanan akan mendeteksi apakah kurang dari 17 cm. jika mendeteksi rintangan kurang dari 17 cm maka robot akan berbelok ke kiri sebanyak satu langkah lalu kembali melakukan pengecekkan sensor PING. Jika PING kanan tidak mendeteksi adanya rintangan kurang dari 17 cm maka kembali melakukan pengecekkan sensor PING.
Perancangan sudut kalibrasi pada gambar 7 digunakan untuk memudahkan peneliti dalam merancang gaya berjalan pada robot. Berikut perancangan sudut kalibrasi robot hexapod.
Gambar 7. Sudut Kalibrasi
Tabel 1. Sudut Kalibrasi
Kaki Kiri depan
Kaki kiri tengah
Degree
Coxa
(µs)
Femur
(µs)
Tibia
(µs)
Degree
Coxa
(µs)
Femur
(µs)
Tibia
(µs)
45 derajat
1000
1000
1000
45 derajat
1000
1000
1000
90 derajat
1500
1500
1500
90 derajat
1500
1500
1500
135 derajat
2000
2000
2000
135 derajat
2000
2000
2000
Kaki Kanan depan
Kaki kanan tengah
Degree
Coxa
(µs)
Femur
(µs)
Tibia
(µs)
Degree
Coxa
(µs)
Femur
(µs)
Tibia
(µs)
45 derajat
1000
1000
1000
45 derajat
1000
1000
1000
90 derajat
1500
1500
1500
90 derajat
1500
1500
1500
135 derajat
2000
2000
2000
135 derajat
2000
2000
2000
Kaki KiriBelakang
Kaki Kanan Belakang
Degree
Coxa
(µs)
Femur
(µs)
Tibia
(µs)
Degree
Coxa
(µs)
Femur
(µs)
Tibia
(µs)
45 derajat
1000
1000
1000
45 derajat
1000
1000
1000
90 derajat
1500
1500
1500
90 derajat
1500
1500
1500
135 derajat
2000
2000
2000
135 derajat
2000
2000
2000
Table 1 menjelaskan pulse yang digunakan untuk menghasilkan sudut sesuai sudut kalibrasi pada gambar 7. berikut perhitungan untuk mendapatkan sudut-sudut kalibrasi berdasarkan pulse yang diberikan pada motor servo.
Perhitungan didapat dari pergerakkan motor servo setiap 1 µs. Motor servo bergerak sebesar 0,09 setiap 1 µs.
IMPLEMENTASI DAN ANALISIS
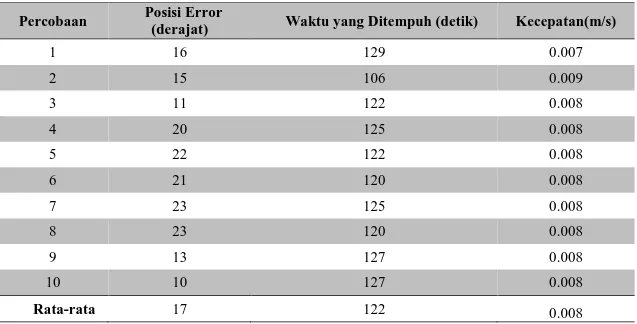
Tabel 2. Percobaan Wave Gait 1 meter
Percobaan Posisi Error
(derajat) Waktu yang Ditempuh (detik) Kecepatan(m/s)
1 16 129 0.007 2 15 106 0.009 3 11 122 0.008 4 20 125 0.008 5 22 122 0.008 6 21 120 0.008 7 23 125 0.008 8 23 120 0.008 9 13 127 0.008 10 10 127 0.008 Rata-rata 17 122 0.008
Tabel 3. Percobaan Ripple Gait 50 cm
Percobaan Posisi Error
(derajat)
Waktu yang Ditempuh
(detik) kecepatan(m/s) 1 - 62 0.008 2 - 65 0.007 3 5 65 0.008 4 - 60 0.007 5 5 68 0.007 6 - 63 0.008 7 - 62 0.008 8 - 60 0.008 9 - 62 0.008 10 - 62 0.008 Rata-rata 0.5 63 0.007
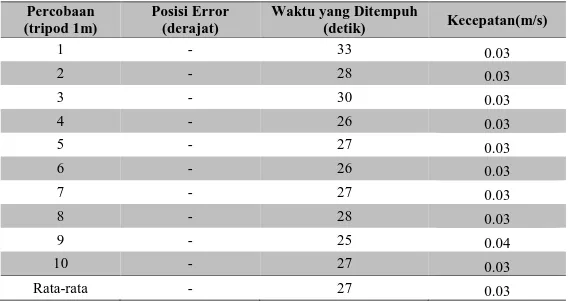
Tabel 4. Percobaan Tripod Gait 1 meter
Percobaan (tripod 1m)
Posisi Error (derajat)
Waktu yang Ditempuh
(detik) Kecepatan(m/s) 1 - 33 0.03 2 - 28 0.03 3 - 30 0.03 4 - 26 0.03 5 - 27 0.03 6 - 26 0.03 7 - 27 0.03 8 - 28 0.03 9 - 25 0.04 10 - 27 0.03 Rata-rata - 27 0.03
Pengambilan data pada tabel 2, tabel 3, dan tabel 4 diambil dengan asumsi error position dibawah 5 derajat tidak dihitung. Dari 3 pengujian gait yang dilakukan yaitu Wave, Ripple, dan Tripod, Tripod Gait memiliki kecepatan rata-rata yang paling cepat dibandingkan dua gait yang lain (Wave dan Ripple) dalam menyelesaikan jarak sepanjang 1 meter, 50 cm untuk ripple. Dalam segi kecepatan pola berjalan, terbukti
Tripod Gait memiliki kecepatan paling cepat diantara gait yang lain, karena setiap 1 step instruksi yang
diberikan dari Arduino akan menggerakkan 3 kaki sekaligus dibandingkan dengan Wave Gait (satu kaki) dan Ripple Gait (dua kaki) sehingga Tripod memiliki kecepatan gait terbaik dalam bergerak maju.
Gambar 8. Trajectory Planning
Pengujian pada trajectory planning jalan lurus pada lorong terpanjang track KRCI dengan panjang 244 cm, lebar 46 cm , dan tinggi dinding 30 cm.
Tabel 5. Percobaan Pada Lorong Sample Track Tanpa Memperbaiki Error
Percobaan Waktu(detik) Jarak(m) Status Arah Kecepatan(m/s)
1 41 1.53 Error Kiri 0.03 2 31 1.41 Error Kanan 0.04 3 21 0.95 Error Kanan 0.04 4 20 0.95 Error Kanan 0.04 5 15 0.76 Error Kanan 0.05 6 17 0.93 Error Kanan 0.05 7 17 0.75 Error Kanan 0.04 8 26 1.26 Error Kanan 0.05 9 18 0.96 Error Kanan 0.05 10 18 0.97 Error Kanan 0.05
Rata-rata 23 1.05 Error Kanan 0.04
Dalam pengujian ini, hanya melihat batas jarak Hexapod yang dapat ditempuh di dalam lorong
sample track. Dari data yang penulis dapat, semua data dari 10 kali percobaan, Hexapod berjalan maju
lebih condong ke kanan dengan rata-rata jarak tempuh 1,05 m dengan kecepatan rata-rata 0,04 m/s sampai robot mengenai dinding disampignya. Sesuai pada tabel 5.
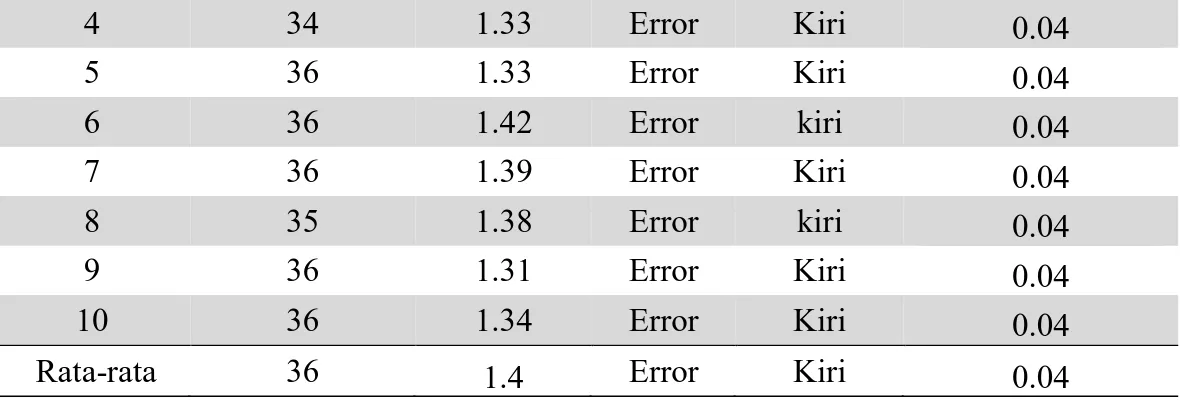
Tabel 6. Percobaan Pada Lorong Sample Track Dengan Memperbaiki Error ke Kiri (Tanpa Sensor)
Percobaan
Waktu(detik)
Jarak(m)
Status
Arah
Kecepatan(m/s)
1
35
1.56
Error
Kiri
0.04
2
42
1.54
Error
Kiri
0.04
4
34
1.33
Error
Kiri
0.04
5
36
1.33
Error
Kiri
0.04
6
36
1.42
Error
kiri
0.04
7
36
1.39
Error
Kiri
0.04
8
35
1.38
Error
kiri
0.04
9
36
1.31
Error
Kiri
0.04
10
36
1.34
Error
Kiri
0.04
Rata-rata
36
1.4
Error
Kiri
0.04
Pada tabel 6, arah jalan Hexapod lebih condong ke arah kiri dan berhasil menempuh jarak lebih jauh dari pengujian sebelumnya. Tetapi disamping itu, penambahan gait baru tersebut ternyata tidak membuat gerak jalan Hexapod kembali lurus tapi lebih condong ke arah kiri dengan jarak rata-rata error 1,4 meter dan kecepatan rata-rata 0,04 m/s.
Tabel 7. Percobaan Pada Lorong Sample Track Dengan Memperbaiki Error Menggunakan Sensor PING
Percobaan Waktu(detik) Jarak(m) status arah Kecepatan(m/s)
1 73 2.01 Berhasil - 0.02 2 77 2.01 Berhasil - 0.02 3 64 2.01 Berhasil - 0.03 4 67 2.01 Berhasil - 0.03 5 68 2.01 Berhasil - 0.03 6 78 2.01 Berhasil - 0.02 7 83 2.01 Berhasil - 0.02 8 76 2.01 Berhasil - 0.02 9 69 2.01 Berhasil - 0.03 10 83 2.01 Berhasil - 0.02 Rata-rata 74 2.01 Berhasil - 0.02
Pada tabel 7, dapat disimpulkan untuk menggunakan sensor ultrasonic dengan meletakkannya secara diagonal pada pengujian kali ini untuk bisa mendeteksi rintangan disamping kiri dan kanan (dinding kiri dan kanan), sehingga robot dapat menuntaskan jarak di lorong sample track sepanjang 244 cm dengan jarak dari start ke finish 201 cm. Karena dilihat dari pengujian sebelumnya dimana robot akan condong ke kanan diawal dan condong ke kiri setelah mencoba memperbaiki posisi.
Dari 10 percobaan yang dilakukan, robot berhasil menuntaskan lorong sample track tanpa mengenai dinding disamping kiri dan kanan hanya dengan 2 sensor ultrasonic dimasing-masing sisinya. Dan dengan kecepatan rata-rata 0,02 m/s.
SIMPULAN DAN SARAN
Kesimpulan yang didapat dari penelitian di atas adalah:
1. Dari segi kecepatan Tripod gait lebih cepat dari pada Wave gait dan Ripple gait. Dalam jarak 1 meter,
Tripod Gait dapat menempuhnya dengan rata-rata waktu 27 detik, kecepatan rata-rata 0,03 m/s. Ripple Gait 63 detik, kecpatan rata-rata 0,007 m/s dan Wave Gait 122 detik, kecepatan rata-rata 0,008 m/s.
2. Wave Gait, Ripple Gait, dan Tripod Gait dapat dicapai menggunakan metode Forward Kinematic,
tetapi kekurangan dari metode yang penulis dapat didalam penelitian ini adalah pola berjalan maju yang masih condong kearah kiri atau kanan.
3. Robot dapat memperbaiki posisinya pada trajectory planning jalan lurus sepanjang 201 cm pada lorong terpanjang pada track dengan keberhasilan 100% dan waktu tempuh 74 detik dan kecepatan rata-rata 0,02 m/s dengan menggunakan dua sensor PING pada sisi kanan, dan sisi kiri dengan peletakkan sebesar 35 dan pendeteksian rintangan kurang dari 17 cm.
Untuk penilitian Hexapod yang bertujuan untuk ikut dalam kontes KRCI kategori berkaki disarankan: 1. Menggunakan inverse kinematic agar dapat menghasilkan gaya berjalan yang bervariasi sehingga lebih
fleksibel di berbagai kondisi.
2. Penambahan sensor PING dan sensor-sensor lainnya agar dapat mendeteksi rintangan yang lebih bervariasi.
DAFTAR PUSTAKA
Bo, J., Cheng, C., Wei, L., & Xiangyun, L. (2011). Design and Configuration of a Hexapod Walking Robot. State Key Lab. of Fluid Power Transm. & Control, Zhejiang Univ., Hangzhou, China,
Measuring Technology and Mechatronics Automation (ICMTMA), 2011 Third International Conference on (Volume:1 ), 978-1-4244-9010-3, 11850229, 863 - 866.
Bo, J., Li-jun, Z., Jia-Lin, Z., & Cheng, C. (2011). Design of the Control System for a Hexapod Walking Robot. Dept. of Mech. Eng., Zhejiang Univ., Hangzhou, China, Digital
Manufacturing and Automation (ICDMA), 2011 Second International Conference, 978-1-4577-0755-1, 12316825, 401 - 404.
ILewinger, A, W., Reekie, H., & Webb, B. (2011). A Hexapod Robot Modeled on The Stick Insect, Carausius Morosus. Sch. of Inf., Inst. for Perception, Action & Behaviour, Univ. of Edinburgh,
Edinburgh, UK, 978-1-4577-1158-9, 12406581, 541 - 548.
Manuel F. Silva, J. A. (2003). Position and Force Control of a Walking Hexapod. Proceedings of ICAR
2003, The 11th International Conference on Advanced Robotics, Department of Electrical Engineering, Institute of Engineering of Porto.
Tareqh Mamkegh, A. H.-J. (2011). Hexapod Robot: Robot Design, Model and Control. Mechatronics
Department, German Jordanian University.
Ferdi, H. C. (2009). Quad Pod Robot For Ladder Application. Jurusan Sistem Komputer-Fakultas
Teknik, Universitas Bina Nusantara.
Iqbal, M. A. (2011). Pengembangan Gait Mobile Robot Tipe Hexapod Untuk Melewati Rintangan.
Jurusan Sistem Komputer-Fakultas Teknik, Universitas Bina Nusantara.
Habibi, D. Y. (2012). Penerapan Inverse Kinematic Pada Pengendalian Gerak Robot. Jurusan Teknik
Elektro - FTI, Institut Teknologi Sepuluh Nopember, 60111.
RIWAYAT PENULIS
Adithya Pratama lahir di kota Jakarta pada tanggal 5 Mei 1991. Penulis menamatkan pendidikan S1 di
Binus University dalam bidang Sistem Komputer pada tahun 2013. Saat ini bekerja sebagai Director di Nomory Studio. Penulis aktif di organisasi HIMTEK sebagai Koordinator Public Relation.
Alfred Junus Verdio lahir di kota Denpasar pada 15 November 1990. Penulis menamatkan pendidikan S1
di Binus University dalam bidang Sistem Komputer pada tahun 2013. Saat ini bekerja sebagai Creative Designer di Ecstopia.
Dwi Sagesti Saputri lahir di kota Jakarta pada 23 Oktober 1990. Penulis menamatkan pendidikan S1 di
Binus University dalam bidang Sistem Komputer pada tahun 2013. Saat ini bekerja sebagai Operating System Support Engineer di PT. Packet Systems Indonesia. Penulis aktif di organisasi HIMTEK sebagai Koordinator HRD.