Abstrak— Reverse osmosisadalah suatu proses pembalikan dari proses osmosis. Osmosis adalah proses perpindahan larutan dari larutan dengan konsentrasi zat terlarut rendah menuju larutan dengan konsentrasi zat terlarut lebih tinggi sampai terjadi kesetimbangan konsentrasi. Dalam penelitian ini telah dilakukan pengendalian proses RO dalam Simulink Matlab dengan menggunakan metode Internal Model Control (IMC) secara invers yang menanggulangi rawan pecahnya membrane RO kembali. Pada RO pertama dan RO kedua menggunakan menggunakan IMC controller untuk pengendali tekanan. Pengendalian dengan model IMC ini menggunakan sistem pengendalian unity, dimana masukan dari sistem proses akan distabilkan pada keluaran proses sehingga sesuai dengan setpoint dari masukan proses. Faktor utama dalam penstabilan pengendalian ini adalah pada nlai gain flter, hingga mencapai respon signal yang sesuai dengan setpoint. Dari hasil penelitian terlihat bahwa saat pengendali IMC unity ini diberikan suatu disturbance berupa signal sinus maka yang terjadi pada respon sistem membentuk signal osilasi yang stabil tetapi tanpa terjadi redaman sempurna. Hasil untuk metode controller IMC unity ini yaitu pada RO1; maksimal overshoot sebesar 16.5%, settling time saat 19 detik, dan pada RO2; maksimal overshoot sebesar 0.84% , settling time saat 17 detik.
Kata Kunci— membran reverseosmosis, tekanan membran, Internal Model Control (IMC)
I. PENDAHULUAN
everse osmosis adalah suatu proses pembalikan dari
proses osmosis. Osmosis adalah proses perpindahan larutan dari larutan dengan konsentrasi zat terlarut rendah menuju larutan dengan konsentrasi zat terlarut lebih tinggi sampai terjadi kesetimbangan konsentrasi (Rusdi 1996) , oleh karena itu cara ini sangat cocok digunakan untuk desalinasi air laut menjadi air payau. Proses seawater desalination di PT.YTL Jawa Power menggunakan sistem membran reverse
osmosis (RO). Sering pecahnya membran RO akibat tekanan
yang terkadang berlebihan menjadikan sebuah permasalahan penting. Hal ini mengakibatkan dapat mengganggu proses lain dan seringnya dilakukan penggantian membran dimana tingkat biaya perusahaan pun menjadi lebih tinggi
Dalam penelitian sebelumnya (Pratama,2011) telah dilakukan simulasi untuk mengatasi permasalahan tersebut dengan sistem umpan balik pengontrol PID, tetapi masih mempunyai beberapa kelemahan, keluaran sistem menjadi tidak sesuai dengan setpoint atau lama dalam mencapai harga yang diinginkan dan terjadi osilasi cukup lama untuk mencapai
steady state. Dalam penelitian kali ini akan mencoba untuk
mengatasi permaslahan tersebut dengan munggunakan metode
Internal Model Control Internal Model Control (IMC) adalah
salah satu metode kontrol, yang menggunakan model dari plant
yang ingin dikontrol. IMC merupakan suatu metode untuk merancang suatu pengontrol umpan balik untuk membuat keluaran suatu proses yang stabil untuk (1) memberikan respon sesuai yang diinginkan terhadap perubahan setpoint, dan (2) mengatasi pengaruh gangguan yang langsung masuk pada keluaran proses. Sehingga diharapkan dapat mengatasi permasalahan yang terjadi terutama tentang pecahnya membran RO di PT.YTL Jawa Power.
II. METODOLOGI PENELITIAN
Gambar 1. Flowchart Penelitian
A. Studi Literatur
Dalam pengerjaan tugas akhir ini diawali dengan studi literatur dari data-data yang telah didapat dari penelitian sebelumnya yaitu “Design Of Pid Pressure Control System On Seawater Desalination Unit – Reverse Osmosis (RO) At PT.
YTL Jawa Power, Paiton East Java” beserta data – data dari
perusahaan.. Dari refrensi tersebut dapat mempermudah pengerjaan tugas akhir ini. Studi literatur lain mengenai prinsip kerja pengendali dengan metode Internal Model Control.
Kemudian selanjutnya mengarah pada identifikasi permasalahn yang terjadi dimana menjadi latar belakang utama penelitian ini yaitu pada unit seawater desalination tepatnya pada sistem
reverse osmosis sering terjadi kerusakan pada membran
dimana fungsi membrane yaitu untuk menyaring air laut yang nantinya akan dijadikan menjadi air tawar. Kerusakan membran RO ini hingga mencapai tingkat tekanan yang
PERANCANGAN SISTEM
INTERNAL MODEL CONTROL
(
IMC
) TEKANAN
PADA UNIT
SEAWATER DESALINATION-
REVERSE
OSMOSIS
(
RO
)
Yohanes Bondan S.P, Fitri Adi Iskandarianto
Jurusan Teknik Fisika, Fakultas Teknologi Industri Institut Teknologi Sepuluh Nopember (ITS)
Jl. Arief Rahman Hakim, Surabaya 60111
E-mail: [email protected]
berlebihan mengakibatkan pecah nya membran RO tersebut. Dari penelitian sebelumnya dengan meninjau studi lapangan maka didapatkan variabel yang menjadi komponen penting dalam proses kinerja plant reverse osmosis di perusahan ini. Komponen yang dapat di manipulasi adalah pressure yang diberikan pada membran, dan yang mempengaruhi perubahan tekanan tersebut adalah besarnya flow yang mengalir masuk pada membran.
B.
Sistem Reverse Osmosis
Pada penelitian ini proses Reverse Osmosis diterapkan pada unit seawater desalination yang bertujuan untuk memisahkan komponen garam yang terkan dung dalam air laut dan menghasilkan keluaran berupa air tawar. Perubahan air laut menjadi air tawar tersebut terajadi karena pada system Reverse
Osmosis (RO) terdapat membran yang diberikan tekanan besar
oleh pompa hidraulik. Proses reverse osmosis pada tahap pertama yaitu saat air laut masuk melalui RO pertama.Input
atau masukan umpan bertekanan dari sistem RO pertama didapat dari satu sistem pendukung yang disebut dengan ultra
filtration (UF) melalui pengirim sistem tersebut yaitu UF
filtrate transfer pump. Kemudian selanjutnya terdapat
cartridge filter yang berfungsi untuk membuang partikel yang
berkukuran lebih dari 5 µm, karena jika partikel lebih dari
ukuran tersebut maka akan menyebabkan kerusakan pada elemen membran dan high pressure. Kemudian pada proses selanjutnya terdapat membran yang berfungsi menghilangkan kadar garam air laut yang merupakan proses penting dari plant tersebut.
Gambar 2. P&ID Plant RO Pertama
Sama seperti sistem RO pertama dimana pada RO kedua terdapat juga bagian penting yaitu cartridge filter yang juga berfungsi untuk menyaring pertikel – partilkel yang berukuran lebih dari 5 μm. Pada dasar nya RO kedua bertugas menyaring kembali keluaran dari proses RO pertama.
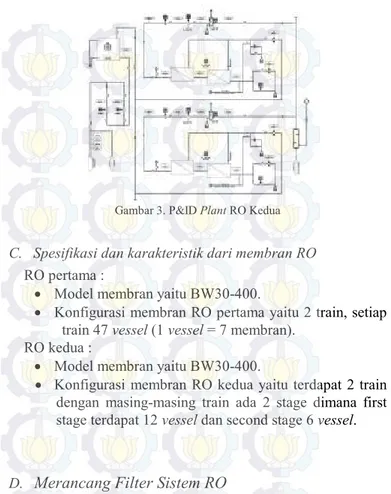
Gambar 3. P&ID Plant RO Kedua
C. Spesifikasi dan karakteristik dari membran RO
RO pertama :
• Model membran yaitu BW30-400.
• Konfigurasi membran RO pertama yaitu 2 train, setiap train 47 vessel (1 vessel = 7 membran).
RO kedua :
• Model membran yaitu BW30-400.
• Konfigurasi membran RO kedua yaitu terdapat 2 train dengan masing-masing train ada 2 stage dimana first stage terdapat 12 vessel dan second stage 6 vessel.
D.
Merancang Filter Sistem RO
Dalam Pengendalian Internal Model Control filter biasanya ditambah dengan controller yang optimal untuk melemahkan efek dari proses-model ketidakcocokan dan menghapus bagian frekuensi yang lebih tinggi dari kebisingan dalam sistem dalam rangka untuk memenuhi spesifikasiyang kuat. Filter memainkan peran penting dalam sistem karena ketidakpastian desain sistem sehingga sistem kontrol yang dirancang dapat mencapai tujuan desain stabilitas kuat dan kinerja yang kuat.
Filter dimodelkan sebagai berikut dari teori sistem kontrol dasar :
Gf (s) =
f dimana parameter filter adalah urutan filter. Urutan filter dipilih sedemikian sehingga mendapatkan GIMC(s) yang tepat untuk mencegah aksi diferensial kontrol. Parameter filter dalam desain dapat dipilih sebagai cara praktis untuk mendapatkan nilai G IMC, maka nilai parameter filter sering dipengaruh oleh bentuk pemodelan dari komponen – komponen dalam kinerja sistem RO itu sendiri, dalam desain,tetap satu-satunya parameter tuneable. Dalam aplikasi ini kita ingin mensimulasikan sistem dengan n=2 untuk membuat GIMC(s) yang tepat.
Gcdidapat dari perkalian nilai total antara model matematis High Pressure Pump(GPRO) dengan model matematis
E.
Merancang IMC Controller
Prinsip utama skema IMC controller ini dalam Gp(s) adalah untuk merancang suatu controller IMC (GIMC)(s) yang terdiri dari kombinasi serangkaian Gc(s) dan Gf(s) dimana Gf(s) adalah parameter filter yang telah ditemukan nilai tepatnya. Oleh karena itu, dari langkah-langkah dalam
merancang controller, kita sudah menetapkan bahwa
kontroler akan mereplikasi kebalikan dari model
proses sesuai Persamaan di bawah ini:
Gc(s) = Gpm(s) -1 (1) Sehingga, GIMC(s) = Gf(s)Gc(s)
Membran Reverse Osmosis (PRO)maka didapat persamaan sebagai berikut :
Gc = GPRO x PRO (2)
Dari persamaan diatas maka dapat di modelkan kembali model matematis GIMC masing – masing Reverse Osmosis sebagai berikut;
GcRO1 = GPRO1 x PRO1
= x
= (3)
Setelah didapatkan nilai Gc maka akan dilakukan pemodelan berikutnya yaitu membentuk sebuah pengendali IMC dengan cara mengubah model matematis Gc kedalam bentuk inverse atau pembalikan sebagai berkut yang dikalikan dengan parameter filter;
GIMC RO1= GcRO1-1 x Gf(s)
= x
GIMC RO1= (4)
Parameter filter τf dapat di ubah hingga mendapatkan G IMC yang tepat. Seperti telah di jelaskan sebelumnya, parameter filter yang tepat pada sistem ini adalah bernilai n=2. Dari persamaan diatas didapatkan GIMC RO1 dalambentuk orde
2 dimana dalam simulasi akan dimasukan dalam model IMC pula.
GcRO2 = GPRO2 x PRO2
= x
= (5)
GIMC RO2= GcRO2-1 x Gf(s)
= x
GIMC RO2 = (6)
mengukur berapa daya listrik yang tersalur ke load dan baterai.
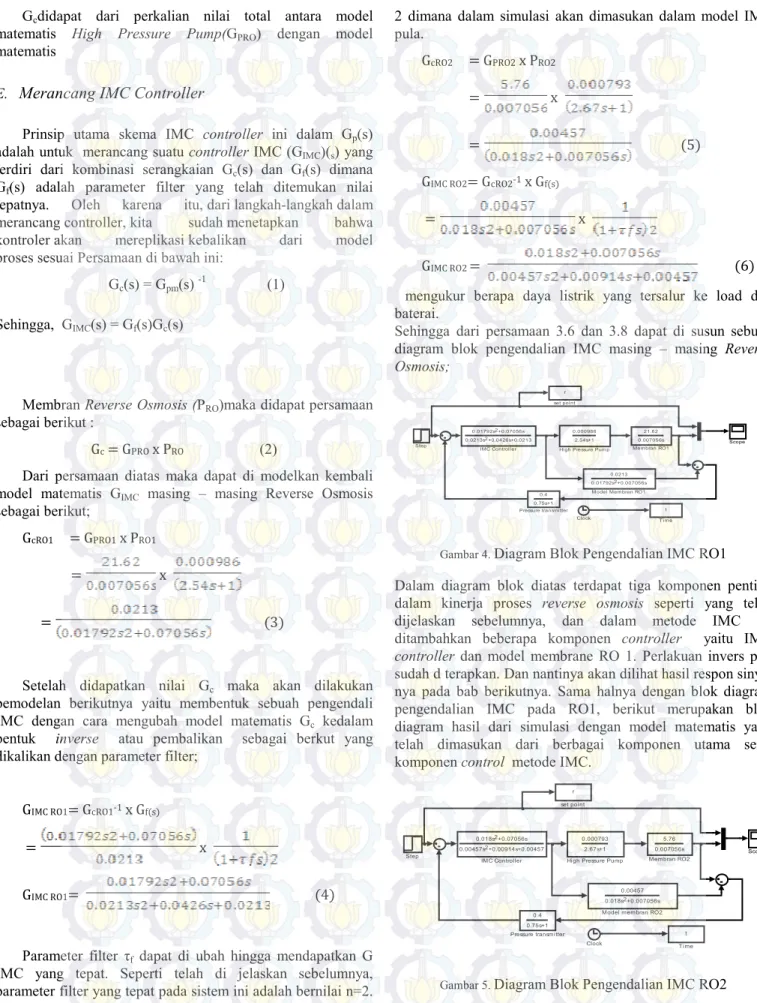
Sehingga dari persamaan 3.6 dan 3.8 dapat di susun sebuah diagram blok pengendalian IMC masing – masing Reverse Osmosis; r set poi nt t T i m e Step Scope 0.4 0.75s+1 Pressure transm i tter
0.0213 0.01792s +0.007056s2 M odel Mem bran RO1 21.62 0.007056s Mem bran RO1 0.01792s +0.07056s2 0.0213s +0.0426s+0.02132 IMC Control l er 0.000986 2.54s+1 Hi gh Pressure Pum p Cl ock
Gambar 4. Diagram Blok Pengendalian IMC RO1 Dalam diagram blok diatas terdapat tiga komponen penting dalam kinerja proses reverse osmosis seperti yang telah dijelaskan sebelumnya, dan dalam metode IMC ini ditambahkan beberapa komponen controller yaitu IMC
controller dan model membrane RO 1. Perlakuan invers pun
sudah d terapkan. Dan nantinya akan dilihat hasil respon sinyal nya pada bab berikutnya. Sama halnya dengan blok diagram pengendalian IMC pada RO1, berikut merupakan blok diagram hasil dari simulasi dengan model matematis yang telah dimasukan dari berbagai komponen utama serta komponen control metode IMC.
r set point t Time Step Scope 0.4 0.75s+1 Pressure transmitter 0.00457 0.018s +0.007056s2 Model membran RO2
5.76 0.007056s Membran RO2 0.018s +0.07056s2 0.00457s +0.00914s+0.004572 IMC Controller 0.000793 2.67s+1 High Pressure Pump
Clock
III. HASIL DAN PEMBAHASAN
A.
Uji Sistem Open Loop
Gambar 6. Diagram Blok Sistem Open Loop RO Pertama
Gambar 7. Diagram Blok Sistem Open Loop RO kedua
Dalam setiap penelitian menggunakan suatu plan maka diperlukan sebuah uji open loop untuk mengetahui bahwa sistem dari suatu proses plan membutuhkan suatu bentuk pengendali tertentu dan memperoleh karakteristik dasar dari parameter – parameter plan tersebut. Seperti yang telah dilakukan pada penelitian sebelumnya tentang uji open loop
ini. (Pratama, 2011)
Pada gambar 6 menjelaskan bahwa proses dari sistem RO pertama memiliki hasil linearitas yang nantinya dapat diberikan suatu metode pengendalian tertentu.
Sama seperti sistem RO pertama, untuk sistem RO kedua ini juga dapat diberikan suatu metode pengendali baru, pada RO pertama diberikan setpoint 21 bar sedangkan pada RO kedua diberikan setpoint sebesar 41 bar, apabila pada masing – masing RO tersebut mengalami kenaikan tekanan yang berlebihan maka membran pada masing - ,masing RO tersebut pun juga akan pecah. Oleh karena itu perlu diberikan sebuah pengendalian yang sesuai dengan karakteristik proses plan tersebut yang nantinya model dari pengendalian itu dapat mengoptimalkan kinerja dari plan RO dan mengurangi pecah nya membran RO itu sendiri
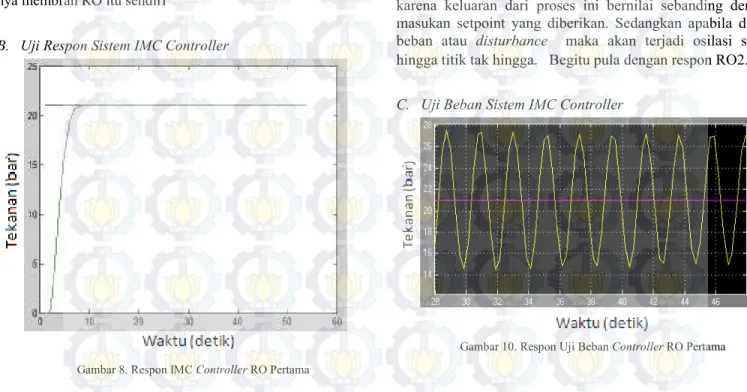
B. Uji Respon Sistem IMC Controller
Gambar 8. Respon IMC Controller RO Pertama
Dengan memasukkan nilai parameter yang diperoleh dari perhitungan maka respon yang diperoleh pada RO pertama dapat dilihat pada gambar 8.
Sesuai respon diatas maka bias
dianalisa bahwa respon dengan menggunakan IMC
(Internal Model Control). Dari respon diatas IMC
(
Internal Model Control
) sangat mendekati nilai set
point sebab metode
control
ini berdasarkan pada
ketepatan satu model yang sudah ada dari suatu proses
yang menjadi pedoman untuk mendesain
system
control
yang stabil.
Gambar 9. Respon IMC Controller RO Kedua Sesuai dengan hasil respon pada simulink MATLAB bahwa hasil respon dengan menggunakan metode control IMC. Pengendali ini menerapakan pengendali unity dimana pengendali unity merupakan suatu pengendalian yang menstabilkan antara masukan dan keluaran dari suatu proses, karena keluaran dari proses ini bernilai sebanding dengan masukan setpoint yang diberikan. Sedangkan apabila diberi beban atau disturbance maka akan terjadi osilasi stabil hingga titik tak hingga. Begitu pula dengan respon RO2
.
C. Uji Beban Sistem IMC Controller
Sebelum di uji dengan tracking setpoint pada pengendalian reverse osmosis ini akan diujiloadnya dimana nantinya respon IMC akan diberi gangguan berupa signal
input sinus, pada saat respon tersebut sudah steady. Dari hasil
uji beban maka dapat diketahui bahwa masukan dan keluaran dari proses sistem pengendalian IMC ini terjadi osilasi yang sangat stabil. Terlihat perbedaan sebelum dan sesudah sistem RO diberi beban atau disturbance. Seperti telah dijelaskan sebelumnya bahwa pengendali IMC ini merupakan pengendali
unity, dimana respon selalu berjalan stabil sesuai masukan yang
diberikan. Pada sistem ini tidak terjadi redaman untuk mencapai kondisi steady state saat diberi beban, hal ini dikarenakan belum diberikan pengendali PID untuk meredam osilasi dari amplitudo stabil tersebut.
Gambar 11. Respon Uji Beban Controller RO Kedua
Sama seperti RO pertama saat diberi beban berupa signal
input sinus, hasil respon akan berosilasi stabil hingga titik tak
hingga, pada penelitian kali ini pengendali IMC sangat berpengaruh dari perubahan paremeter filter yang diberikan pada proses sistem tersebut, sehingga respon dapat mencapai kondisi
steady state sempurna sesuai setpoint, proses ini sama seperti
proses trying and error, untuk mengurangi proses tersebut maka secara keseluruhan pengendali IMC ini dapat diberikan masukan berupa pengendali PID untuk mutlak meredam adanya osilasi secara terus menerus. Pada proses reverese osmosis ini dilakukan tanpa memberikan beban signal sinus, sehingga hasil dari respon ini dapat mencapai kondisi steady state. Setelah melakukan uji beban, maka dilakukan tracking setpoint kembali pada kondisi awal sebelum diberikan beban berupa signal sinus. Sehingga hasil dari tracking setpoint merupakan respon asli dari pengendalian IMC dalam sistem unity.
D. Tracking Set Point
Pada pengujian ini bertujuan untuk mengetahui respon
plant dapat mengikuti perubahan dari setpoint ketika proses
masih berjalan. Perubahan setpoint diatur sebesar 11 bar kemudian tekanan dinakikkan menjadi 21 bar, dinaikkan menjadi 31 bar, diturunkan menjadi 21 bar kembali dan penurunan terakhir diubah menjadi 11 bar.
Gambar 12. Tracking Set Point pada RO pertama
Respon sistem control RO pertama tidakmemiliki
maximum Saat diuji dengan tracking setpoint pada
pengendalian level tersebut masih bias mengikuti setpoint
yang diinginkan. Disini bias disimpulkan bahwa pada perhitungan tersebut benar. Pada saat setpoint pertama sekitar 38% hasil respon IMC masih bias mengikuti nilai setpoint
yang diberikan saat di tracking ke setpoint berikutnya sekitar 97% ternyata masih bias mengikutinya tetapi nilai maximum
overshoot lebih besar dibandingkan dengan step yang pertama,
walaupun masih terdapat maximum overshoot pada detik ke 123 IMC masih bias mengikuti respon dari setpoint
yang diinginkan
.
Gambar 13. Tracking Set Point pada RO kedua
Sama dengan hasil track set point RO1 Saat diuji dengan tracking setpoint pada pengendalian level tersebut masih bias mengikuti setpoint yang diinginkan. Disini bias disimpulkan bahwa pada perhitungan tersebut benar. Pada saat setpoint pertama sekitar 89% hasil respon IMC masih bias mengikuti nilai setpoint yang diberikan saat di
tracking ke setpoint berikutnya sekitar 97% ternyata masih bias
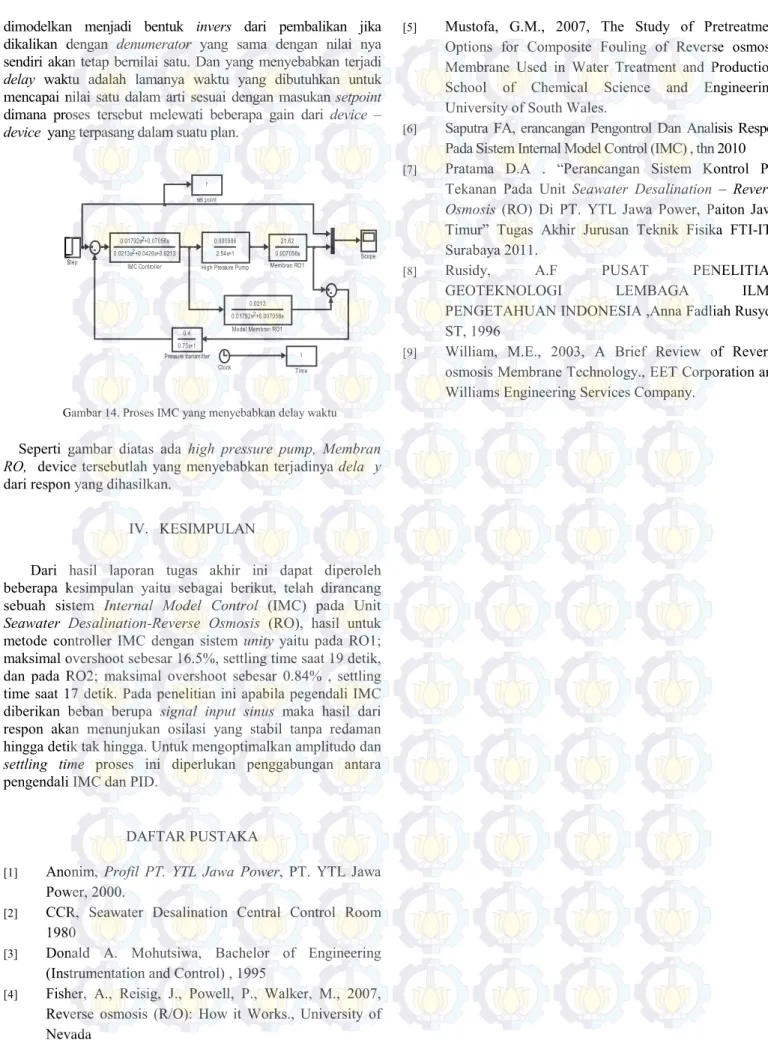
mengikutinya tetapi nilai maximum overshoot lebih besar dibandingkan dengan step yang pertama, walaupun masih terdapat maximum overshoot pada detik ke 123 IMC masih bias mengikuti respon dari setpoint yang diinginkan. Terlihat pada gambar hasil tracking point, pada setiap perpindahan step dalam perubahan setpoint terjadi delay waktu yang diakibatkan karena penstabilan dari controll yang
dimodelkan menjadi bentuk invers dari pembalikan jika dikalikan dengan denumerator yang sama dengan nilai nya sendiri akan tetap bernilai satu. Dan yang menyebabkan terjadi
delay waktu adalah lamanya waktu yang dibutuhkan untuk
mencapai nilai satu dalam arti sesuai dengan masukan setpoint
dimana proses tersebut melewati beberapa gain dari device –
device yang terpasang dalam suatu plan.
r set point t Time Step Scope 0.4 0.75s+1 Pressure transmitter 0.0213 0.01792s +0.007056s2 Model Membran RO1 21.62 0.007056s Membran RO1 0.01792s +0.07056s2 0.0213s +0.0426s+0.02132 IMC Controller 0.000986 2.54s+1 High Pressure Pump
Clock
Gambar 14. Proses IMC yang menyebabkan delay waktu Seperti gambar diatas ada high pressure pump, Membran RO, device tersebutlah yang menyebabkan terjadinya dela y
dari respon yang dihasilkan.
IV. KESIMPULAN
Dari hasil laporan tugas akhir ini dapat diperoleh beberapa kesimpulan yaitu sebagai berikut, telah dirancang sebuah sistem Internal Model Control (IMC) pada Unit
Seawater Desalination-Reverse Osmosis (RO), hasil untuk
metode controller IMC dengan sistem unity yaitu pada RO1; maksimal overshoot sebesar 16.5%, settling time saat 19 detik, dan pada RO2; maksimal overshoot sebesar 0.84% , settling time saat 17 detik. Pada penelitian ini apabila pegendali IMC diberikan beban berupa signal input sinus maka hasil dari respon akan menunjukan osilasi yang stabil tanpa redaman hingga detik tak hingga. Untuk mengoptimalkan amplitudo dan
settling time proses ini diperlukan penggabungan antara
pengendali IMC dan PID.
DAFTAR PUSTAKA
[1] Anonim, Profil PT. YTL Jawa Power, PT. YTL Jawa Power, 2000.
[2] CCR, Seawater Desalination Central Control Room 1980
[3] Donald A. Mohutsiwa, Bachelor of Engineering (Instrumentation and Control) , 1995
[4] Fisher, A., Reisig, J., Powell, P., Walker, M., 2007, Reverse osmosis (R/O): How it Works., University of Nevada
[5] Mustofa, G.M., 2007, The Study of Pretreatment Options for Composite Fouling of Reverse osmosis Membrane Used in Water Treatment and Production. School of Chemical Science and Engineering. University of South Wales.
[6] Saputra FA, erancangan Pengontrol Dan Analisis Respon Pada Sistem Internal Model Control (IMC) , thn 2010 [7] Pratama D.A . “Perancangan Sistem Kontrol Pid
Tekanan Pada Unit Seawater Desalination – Reverse
Osmosis (RO) Di PT. YTL Jawa Power, Paiton Jawa
Timur” Tugas Akhir Jurusan Teknik Fisika FTI-ITS Surabaya 2011.
[8] Rusidy, A.F PUSAT PENELITIAN
GEOTEKNOLOGI LEMBAGA ILMU
PENGETAHUAN INDONESIA ,Anna Fadliah Rusydi, ST, 1996
[9] William, M.E., 2003, A Brief Review of Reverse osmosis Membrane Technology., EET Corporation and Williams Engineering Services Company.