2.1 Tinjauan Pustaka
Sistem pengaturan temperatur memegang peranan yang sangat penting dalam kehidupan ini. Sebagai contoh dalam dunia memasak diperlukan pengaturan temperatur yang tepat untuk membuat roti sehingga hasilnya sesuai harapan. Oleh karena itu diperlukan suatu alat yang bisa untuk mengatur temperatur oven. Sensor temperatur LM35 membaca temperatur pada oven kemudian diubah dalam bentuk tegangan yang menjadi masukan bagi mikrokontroler untuk mengatur tegangan supply ke oven sehingga heater bekerja sesuai dengan respon yang diberikan oleh mikrokontroler.
Pengatur temperatur dengan sistem kendali PID telah banyak diaplikasikan diantaranya oleh Dheka Bakti pada tahun 2011 dalam Tugas Akhirnya meneliti tentang pengendalian suhu plant secara cascade control dengan algoritma Proporsional-Integral menghasilkan respon sistem yang stabil1.
Penelitian lainnya dilakukan oleh Ahmad Shafi Mukhaitir pada tahun 2010. Dalam penelitian ini diaplikasikan kendali PID untuk mengendalikan
electric water heater. Sistem mampu menangani gangguan dengan cepat dan
menghasilkan respon yang stabil. Faishol Fathu Riza juga berhasil mengaplikasikan algoritma kontrol PI untuk mengendalikan inkubator pada suhu 36oCelcius sampai dengan 38oCelcius menggunakan tuning PI secara trial and error2.
Pada tulisan tersebut menjadi acuan dalam konsep pembuatan Tugas Akhir ini, akan tetapi banyak perbedaan dari segi perancangan sistem, perangkat
1
http://ejournal.undip.ac.id/index.php/transmisi, Aplikasi Kendali PID Menggunakan Skema Gain Scheduling Untuk Pengendalian Suhu Cairan pada Plant Electric Water Heater, diakses 7 Februari 2015 pukul 03.20 WIB.
2
http://eprints.undip.ac.id/25518/1/ML2F305208.pdf. Perancangan Sistem Pengendali Suhu Dan Memonitoring
keras, perangkat lunak dan teknik pemrograman mikrokontroler. Pengatur temperatur oven dengan sistem kendali PID pada tugas akhir ini didesain lebih fleksibel dalam pengaturan parameter temperatur, range pengaturan suhu lebih lebar yaitu 30oC sampai dengan 140oC, menggunakan interface LCD dan keypad dan secara real time data Process Value (PV) alat ini dapat disimpan dalam komputer sehingga dapat dimonitor performanya serta dapat ditampilkan dalam bentuk grafik pada komputer.
2.2 Landasan Teori
2.2.1 Sensor Temperatur LM35
Sensor temperatur LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran temperatur menjadi besaran listrik dalam bentuk tegangan. Sensor temperatur LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor temperatur yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak memerlukan penyetelan lanjutan3.
Meskipun tegangan sensor ini dapat mencapai 30 volt akan tetapi yang diberikan ke sensor adalah sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 µA hal ini berarti LM35 mempunyai kemampuan menghasilkan panas (
self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah
yaitu kurang dari 0,5 ºC pada temperatur 25 ºC .
Gambar 2.1 Sensor LM35
3
Gambar 2.1 menunjukan bentuk dari LM35 tampak depan. 3 pin LM35 menujukan fungsi masing-masing pin diantaranya, pin 1 berfungsi sebagai sumber tegangan kerja dari LM35, pin 2 atau tengah digunakan sebagai tegangan keluaran atau Vout dengan jangkauan kerja dari 0 Volt sampai dengan 1,5 Volt dengan tegangan operasi sensor LM35 yang dapat digunakan antara 4 Volt sampai 30 Volt. Keluaran sensor ini akan naik sebesar 10 mV setiap derajat celcius sehingga diperoleh persamaan sebagai berikut :
VLM35 = Temperatur x 10 mV Persamaan 2.1
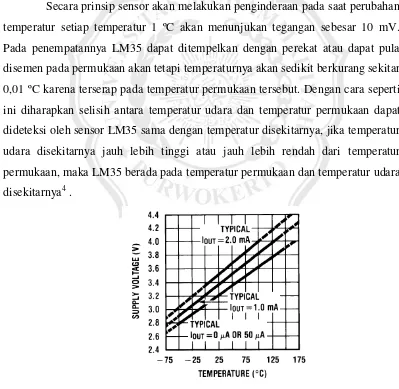
Secara prinsip sensor akan melakukan penginderaan pada saat perubahan temperatur setiap temperatur 1 ºC akan menunjukan tegangan sebesar 10 mV. Pada penempatannya LM35 dapat ditempelkan dengan perekat atau dapat pula disemen pada permukaan akan tetapi temperaturnya akan sedikit berkurang sekitar 0,01 ºC karena terserap pada temperatur permukaan tersebut. Dengan cara seperti ini diharapkan selisih antara temperatur udara dan temperatur permukaan dapat dideteksi oleh sensor LM35 sama dengan temperatur disekitarnya, jika temperatur udara disekitarnya jauh lebih tinggi atau jauh lebih rendah dari temperatur permukaan, maka LM35 berada pada temperatur permukaan dan temperatur udara disekitarnya4 .
Gambar 2.2 Grafik hubungan temperatur dan tegangan LM35
4
Jarak yang jauh diperlukan penghubung yang tidak terpengaruh oleh interferensi dari luar, dengan demikian digunakan kabel selubung yang ditanahkan sehingga dapat bertindak sebagai suatu antenna penerima dan simpangan di dalamnya, juga dapat bertindak sebagai perata arus yang mengkoreksi pada kasus yang sedemikian, dengan mengunakan metode bypass kapasitor dari Vin untuk ditanahkan. Berikut ini adalah karakteristik dari sensor LM35 :
1. Memiliki sensitivitas temperatur, dengan faktor skala linier antara tegangan dan temperatur 10 mVolt/ºC, sehingga dapat dikalibrasi langsung dalam celcius.
2. Memiliki ketepatan atau akurasi kalibrasi yaitu 0,5ºC pada temperatur 25 ºC. 3. Memiliki jangkauan maksimal operasi temperatur antara -55 ºC sampai +150
ºC.
4. Bekerja pada tegangan 4 sampai 30 volt. 5. Memiliki arus rendah yaitu kurang dari 60 µA.
6. Memiliki pemanasan sendiri yang rendah (low-heating) yaitu kurang dari 0,1 ºC pada udara diam.
7. Memiliki impedansi keluaran yang rendah yaitu 0,1 W untuk beban 1 mA. 8. Memiliki ketidaklinieran hanya sekitar ± ¼ ºC.
2.2.2 PID Digital
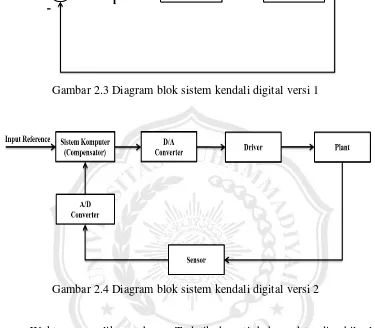
Gambar 2.3Diagram blok sistem kendali digital versi 1
Gambar 2.4Diagram blok sistem kendali digital versi 2
Waktu pencuplikan sebesar T detik berarti bahwa data diambil oleh sistem komputer dari keluaran A/D konverter setiap T detik. Dengan demikian A/D konverter harus mengubah data analog ke data digital dalam waktu kurang dari T detik5. Agar data yang diambil oleh sistem komputer (hasil sampling) valid, maka A/D konverter harus diberi tahu kapan harus melakukan konversi, sehingga setelah selang waktu T detik, data sudah siap untuk diambil oleh sistem komputer.
Sinyal referensi (biasanya dalam bentuk digital) dan sinyal hasil sampling keluaran sensor dibandingkan sehingga akan didapatkan sinyal selisih
(error), sinyal error inilah menjadi masukan bagi kontroler. Selanjutnya kontroler
akan mengolah sinyal error menjadi sinyal kendali digital yang akan diubah menjadi sinyal kendali analog oleh D/A konverter. Sinyal keluaran D/A konverter
5
ini nantinya akan digunakan untuk mengendalikan plant. Tanggapan dari plant diukur oleh sensor, keluaran sensor akan diubah lagi menjadi sinyal digital oleh A/D konverter dan selanjutnya proses akan berulang terus menerus.
Seperti yang telah dijelaskan di atas bahwa bagian kontroler ini dapat berupa program atau hardware digital. Sehingga nantinya dapat dipilih dari jenis kendali yang akan diterapkan. Jika dalam kendali analog/konvensional ada kendali PID maka versi digitalnya juga dapat dibuat.
Secara analisa matematis rumusan fungsi alih sistem dalam bentuk laplace diubah ke model diskrit lewat pencuplikan, kemudian diubah ke bentuk z dengan transformasi z6. Juga secara matematis proses proporsional, integral dan diferensial dapat diimplementasikan dengan pendekatan numeris.
Proporsional Integral Derivative (PID)
Di dalam suatu sistem kontrol dikenal adanya beberapa macam aksi kontrol, diantaranya yaitu aksi kontrol proporsional, aksi kontrol integral dan aksi kontrol derivative. Masing-masing aksi kontrol ini mempunyai keunggulan-keunggulan tertentu, dimana aksi kontrol proporsional mempunyai keunggulan-keunggulan
rise time yang cepat, aksi kontrol integral mempunyai keunggulan untuk
memperkecil error, dan aksi kontrol derivative mempunyai keunggulan untuk memperkecil error atau meredam overshot/undershot. Untuk itu agar dapat menghasilkan output dengan risetime yang cepat dan error yang kecil dapat menggabungkan ketiga aksi kontrol ini menjadi aksi kontrol PID. Parameter pengontrol proporsional integral derivative (PID) selalu didasari atas tinjauan terhadap karakteristik yang diatur (plant). Dengan demikian bagaimanapun rumitnya suatu plant, prilaku plant tersebut harus diketahui terlabih dahulu sebelum pencarian parameter PID itu dilakukan.
6
Pengontrol Proporsional
Pengontrol proposional memiliki keluaran yang sebanding atau proposional dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga aktualnya). Secara lebih sederhana dapat dikatakan bahwa keluaran pengontrol proporsional merupakan perkalian antara konstanta proposional dengan masukannya. Perubahan pada sinyal masukan akan segera menyebabkan sistem secara langsung mengeluarkan output sinyal sebesar konstanta pengalinya.
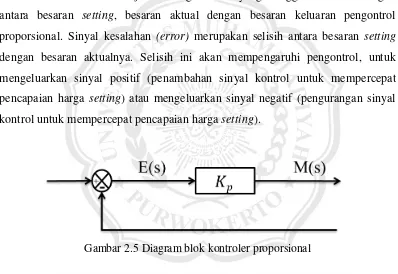
Gambar 2.5 menunjukkan diagram blok yang menggambarkan hubungan antara besaran setting, besaran aktual dengan besaran keluaran pengontrol proporsional. Sinyal kesalahan (error) merupakan selisih antara besaran setting dengan besaran aktualnya. Selisih ini akan mempengaruhi pengontrol, untuk mengeluarkan sinyal positif (penambahan sinyal kontrol untuk mempercepat pencapaian harga setting) atau mengeluarkan sinyal negatif (pengurangan sinyal kontrol untuk mempercepat pencapaian harga setting).
Gambar 2.5 Diagram blok kontroler proporsional
Pengontrol proposional memiliki 2 parameter, pita proposional
(propotional band) dan konstanta proporsional. Daerah kerja kontroler efektif
dicerminkan oleh pita proporsional sedangkan konstanta proporsional menunjukan nilai faktor penguatan sinyal terhadap sinyal kesalahan Kp.
Hubungan antara pita proporsional (PB) dengan konstanta proporsional (Kp) ditunjukkan secara persentasi oleh persamaan berikut:
PB = Proportional Band Kp = Konstanta Proporsional
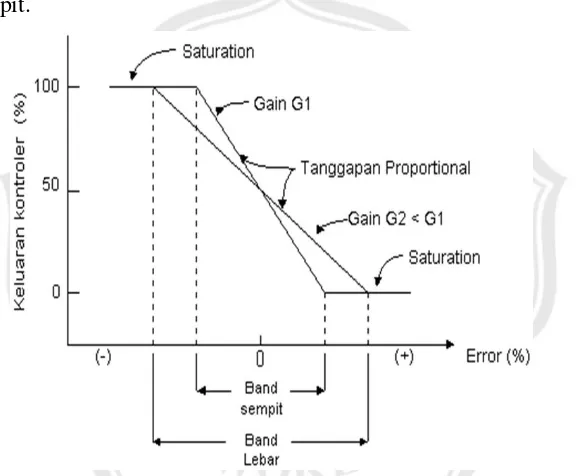
Gambar 2.6 menunjukkan grafik hubungan antara PB, keluaran pengontrol dan kesalahan yang merupakan masukan pengontrol. Ketika konstanta proporsional bertambah semakin tinggi, pita proporsional menunjukkan penurunan yang semakin kecil, sehingga lingkup kerja yang dikuatkan akan semakin sempit.
Gambar 2.6Proporsional band dari pengontrol proporsional tergantung pada penguatan
Ciri-ciri pengontrol proposional harus diperhatikan ketika pengontrol tersebut diterapkan pada suatu sistem. Secara eksperimen, pengguna pengontrol proporsional harus memperhatikan ketentuan-ketentuan berikut ini :
1. Jika nilai Kp kecil, pengontrol proposional hanya mampu melakukan koreksi kesalahan yang kecil, sehingga akan menghasilkan respon sisitem yang lambat. 2. Jika nilai Kp tepat/sesuai, respon sistem menunjukan semakin cepat mencapai
3. Namun jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan, akan mengakibatkan sistem bekerja tidak stabil, atau respon sistem akan berisolasi
Pengontrol Integral
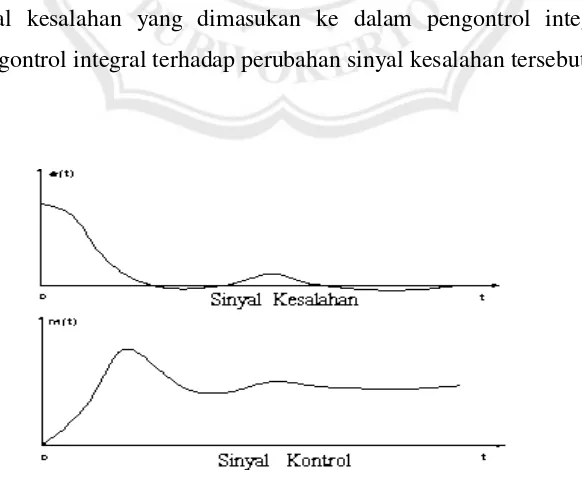
Pengontrol integral berfungsi menghasilkan respon sistem yang memiliki kesalahan keadaan stabil nol. Jika sebuah plant tidak memiliki unsur integrator (1/s), pengontrol proposional tidak akan mampu menjamin keluaran sistem dengan kesalahan keadaan stabilnya nol. Pengontrol integral dapat memperbaiki respon sistem, yaitu mempunyai kesalahan keadaan stabilnya nol. Pengontrol integral memiliki karakteristik seperti halnya sebuah integral. Keluaran sangat dipengaruhi oleh perubahan yang sebanding dengan nilai sinyal kesalahan. Keluaran pengontrol ini merupakan penjumlahan yang terus menerus dari perubahan masukannya. Jika sinyal kesalahan tidak mengalami perubahan, keluaran akan menjaga keadaan seperti sebelum terjadinya perubahan masukan. Sinyal keluaran pengontrol integral merupakan luas bidang yang dibentuk oleh kurva kesalahan penggerak. Sinyal keluaran akan berharga sama dengan harga sebelumnya ketika sinyal kesalahan berharga nol. Gambar 2.7 menunjukkan contoh sinyal kesalahan yang dimasukan ke dalam pengontrol integral dan keluaran pengontrol integral terhadap perubahan sinyal kesalahan tersebut.
Gambar 2.8 Diagram blok hubungan antara besaran kesalahan dengan pengontrol Integral
Gambar 2.8 menunjukkan diagram blok antara besaran kesalahan dengan keluaran suatu pengontrol integral. Pengaruh perubahan konstanta integral terhadap keluaran integral ditunjukkan oleh Gambar 2.9. Ketika sinyal kesalahan berlipat
ganda, maka nilai laju perubahan keluaran pengontrol berubah menjadi dua kali dari
nilai semula. Jika nilai konstanta integrator berubah menjadi lebih besar, sinyal
kesalahan yang relatif kecil dapat mengakibatkan laju keluaran menjadi besar.
Gambar 2.9 Perubahan keluaran sebagai akibat penguatan dan kesalahan
Ketika digunakan, pengontrol integral mempunyai beberapa karakteristik berikut ini:
1. Keluaran pengontrol membutuhkan selang waktu tertentu, sehingga pengontrol integral cenderung memperlambat respon.
3. Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki. 4. Konstanta integral Ki yang berharga besar akan mempercepat hilangnya offset.
Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi dari sinyal keluaran pengontrol.
Pengontrol Derivative
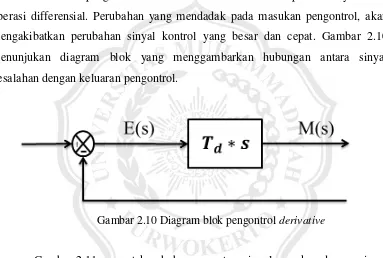
Keluaran pengontrol derivative memiliki sifat seperti halnya suatu operasi differensial. Perubahan yang mendadak pada masukan pengontrol, akan mengakibatkan perubahan sinyal kontrol yang besar dan cepat. Gambar 2.10 menunjukan diagram blok yang menggambarkan hubungan antara sinyal kesalahan dengan keluaran pengontrol.
Gambar 2.10 Diagram blok pengontrol derivative
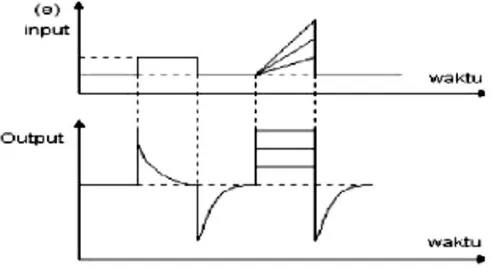
Gambar 2.11 Kurva waktu hubungan input-output pengontrol derivative
Karakteristik pengontrol derivative adalah sebagai berikut :
1. Pengontrol ini tidak dapat menghasilkan keluaran bila tidak ada perubahan pada masukannya (berupa sinyal kesalahan).
2. Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan pengontrol tergantung pada nilai Td dan laju perubahan sinyal kesalahan. 3. Pengontrol derivative mempunyai suatu karakter untuk mendahului, sehingga
pengontrol ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit kesalahan menjadi sangat besar. Jadi pengontrol derivative dapat mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat korektif, dan cenderung meningkatkan stabilitas sistem.
Berdasarkan karakteristik pengontrol tersebut, pengontrol derivative umumnya dipakai untuk mempercepat respon awal suatu sistem, tetapi tidak memperkecil kesalahan pada keadaan stabilnya. Kerja pengontrol derivative hanya efektif pada lingkup yang sempit, yaitu pada periode peralihan. Oleh sebab itu pengontrol derivative tidak pernah digunakan tanpa ada pengontrol lain sebuah sistem.
Pengontrol PID
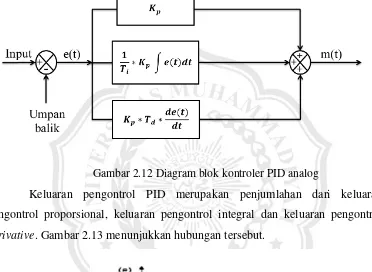
menjadi pengontrol proposional plus integral plus derivative (pengontrol PID)7 seperti pada Gambar 2.12. Elemen-elemen pengontrol P, I dan D masing-masing secara keseluruhan bertujuan untuk mempercepat reaksi sebuah sistem, menghilangkan offset dan menghasilkan perubahan awal yang besar.
Gambar 2.12 Diagram blok kontroler PID analog
Keluaran pengontrol PID merupakan penjumlahan dari keluaran pengontrol proporsional, keluaran pengontrol integral dan keluaran pengontrol
derivative. Gambar 2.13 menunjukkan hubungan tersebut.
Gambar 2.13Hubungan dalam fungsi waktu antara sinyal keluaran dengan masukan untuk pengontrol PID
7
Karakteristik pengontrol PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter P, I dan D. Pengaturan konstanta Kp, Ti, dan Td akan mengakibatkan penonjolan sifat dari masing-masing elemen. Satu atau dua dari ketiga konstanta tersebut dapat diatur lebih menonjol dibanding yang lain. Konstanta yang menonjol itulah yang akan memberikan kontribusi pengaruh pada respon sistem secara keseluruhan.
2.2.3 Zero Crossing Detector
Zero crossing detector adalah rangkaian yang digunakan untuk
mendeteksi apakah tegangan fasa berada pada posisi positif atau negatif dilihat dari acuan netral dan berfungsi untuk memulai melakukan pemicuan dan berapa besar sudut picu yang akan disulutkan pada thyristor8. Prinsip kerja zero detector adalah dengan membandingkan tengangan AC dengan tegangan referensi nol volt. Apabila tegangannya lebih besar dari nol volt maka output zero detector akan high dan apabila lebih kecil dari nol volt maka outputnya akan low. Perubahan dari low ke high (PGT) dan dari high ke low (NGT) inilah saat terjadi zero.
Gambar 2.14Rangkaian zero crossing detector
8
http://san-jyuu.blogspot.com, Sistem Interface Input Output antara Sistem Digital dan Sistem Analog, diakses tanggal 01 November 2013 pukul 10.50 WIB
Gambar 2.14 merupakan rangkaian zero crossing detector yang
menggunakan sistem yang terisolasi dengan menggunakan transformer step down.
Teknik ini paling aman digunakan namun biaya pembuatannya relatif lebih mahal
karena masih menggunakan transformer. Dengan adanya rangkaian sistem
interface antara tegangan tinggi dan tegangan rendah maka diharapkan tidak
terjadi rusaknya port mikrokontroler atau PC karena mendapat imbas tegangan
tinggi dari aplikasi seperti motor AC.
2.2.4 Optocoupler
MOC3021 adalah driver Triac yang didalamnya menggunakan isolasi optis (optocoupler). Driver ini menjembatani sinyal trigger yang berasal dari kontroler yang umumnya memiliki level tegangan dan arus kecil dengan bagian beban yang memiliki tegangan dan arus yang relatif tinggi. Skema dalam MOC3021 ini terlihat di Gambar 2.15.
Gambar 2.15Bentuk fisik dan konfigurasi pin MOC3021
Komponen ini memiliki 6 kaki dengan 2 kaki yang tidak digunakan. Kaki anoda (1) dihubungkan ke Vcc, kaki katoda (2) dihubungkan dengan pulsa trigger yang active low. Fungsi trigger dengan active low ini adalah untuk menghindari kontroler melakukan sourcing(mengeluarkan arus) sehingga tidak membebani kontroler yang umumnya hanya mampu mengeluarkan arus yang sangat kecil. Kaki 4 dan 6 dihubungkan dengan beban. Kaki 3 dan 5 tidak digunakan.
Pada saat ada pulsa low di kaki 2 maka dioda dalam MOC3021 akan memancarkan cahaya sehingga arus dari beban dapat mengalir dari kaki 6 melalui
driver dan keluar melalui kaki 4 yang akan mentriger kaki gate Triac yang
bersangkutan. Pada saat itulah Triac dalam keadaan ON sehingga dapat mengalirkan daya sesuai dengan waktu firing-nya.
2.2.5 Triac
Gambar 2.17Konfigurasi pin Triac
Jika terminal MT1 dan MT2 diberi tegangan jala-jala PLN dan gate
dalam kondisi mengambang maka tidak ada arus yang dilewatkan oleh Triac
(kondisi idlle) sampai pada tegangan „break over‟ Triac tercapai. Kondisi ini
dinamakan kondisi off Triac. Apabila gate diberi arus positif atau negatif maka
tegangan „break over‟ ini akan turun.Semakin besar nilai arus yang masuk ke gate
maka semakin rendah pula tegangan „break over‟nya. Kondisi ini dinamakan
sebagai kondisi on Triac. Apabila Triac sudah „on‟ maka Triac akan dalam
kondisi on selama tegangan pada MT1 dan MT2 di atas nol volt. Apabila
tegangan pada MT1 dan MT2 sudah mencapai nol volt maka kondisi kerja Triac
akan berubah dari on ke off. Apabila Triac sudah menjadi off kembali, Triac akan
selamanya off sampai ada arus trigger ke gate dan tegangan MT1 dan MT2
melebihi tegangan „break over‟nya.
mengurangi arus IT di bawah arus IH9. Triac bekerja mirip seperti SCR yang paralel bolak-balik, sehingga dapat melewatkan arus dua arah. Kurva karakteristik dari Triac dapat dilihat pada Gambar 2.18.
Gambar 2.18Kurva karakteristik Triac
2.2.6 Mikrokontroler AVR(ATMega 32)
Atmel AVR Atmega32 adalah mikrokontroler CMOS 8 bit yang memiliki arsitektur RISC(Reduced Instruction Set Computers) dengan kemampuan memproses instruksi dalam satu clock cycle. Sistem Atmega32 didesain untuk mengoptimalkan kebutuhan daya terhadap kecepatan proses dengan kemampuan kurang lebih 1 MIPS per MHZ.
Prosesor AVR mengkombinasikan sebuah Instruksi yang kompleks dengan general purpose working register. Semua 32 register tersebut secara langsung dihubungkan ke Arithmetic Logic Unit (ALU), memungkinkan 2 register independen diproses menjadi satu instruksi pemprosesan dalam satu clock cycle. Hasil arsitektur tersebut adalah efisiensi banyak kode dan lebih cepat dari pada mikrokontroler CISC (Complex Instruction Set Computers) konvensional.
9
http://elektronika-dasar.web.id, “Definisi dan Prinsip Kerja TRIAC”, diakses tanggal 01
Atmega32 menyediakan berbagai fitur : 32 Kbytes In-System
Programmable Flash program memori dengan kemampuan Read-While-Write,
1024 bytes EEPROM, 2 Kbytes SRAM, 32 general purpose I/O lines, 32 general
purpose working registers, sebuah JTAG interface untuk boundary-scan, On-chip
Debugging support and progamming, 3 fleksibel Timer/Counters dengan compare
mode, Internal dan External Interrupts, sebuah serial programmable USART, sebuah byte yang berorientasi pada Two-Wire Serial Interface, 8-channel 10-bit ADC dengan pilihan perbedaan input stage dengan programmable gain (TQFP package only), sebuah programmable WatchdogTimer dengan internal oscillator,
SPI serial port, dan 6 software selectable power savingmodes10.
Atmega32 dibuat menggunakan teknologi Atmel’s high density
nonvolatile memory. Pada chip ISP Flash memungkinkan program memori
tersebut untuk diprogram ulang di dalam sistem melalui sebuah SPI serial
interface, dengan sebuah nonvolatile memori programmer konvensional, atau
dengan sebuah On-chip Boot program running pada prosesor AVR tersebut. Boot program tersebut dapat menggunakan banyak interface untuk men-download aplikasi program ke dalam aplikasi flash memori. Perangkat lunak di dalam Boot
Flash akan bekerja secara terus-menerus saat aplikasi flash di perbarui,
menyediakan operasi Read-While-Write. Dengan mengkombinasikan sebuah 8-bit RISC CPU dengan In-System Self-Programmable Flash pada sebuah monolithic chip, Atmega32 menjadi sangat fleksibel untuk banyak aplikasi embedded kontrol11.
Dalam meningkatkan performa dan sistem paralel, AVR menggunakan Havard arsitektur dengan memisahkan memori, jalur untuk program dan data, dapat dilihat pada Gambar 2.19 dan Gambar 2.20.
10
www.atmel.com, Data Sheet Book ATMega32, didownload 15 Maret 2012 pukul 13.14 WIB.
11
2.2.7 Identifikasi Sistem
Identifikasi sistem digunakan untuk menentukan model dari suatu sistem yang disusun berdasarkan kurva reaksi yang diperoleh dari uji tanggapan sistem terbuka(open loop) dengan fungsi step. Dengan model ciancone, hasil identifikasi sistem kemudian didapatkan model matematis dengan pendekatan sistem orde satu ditambah delay sistem yang ditunjukkan pada Gambar 2.2112.
Gambar 2.21 Pemodelan dengan ciancone
Langkah – langkah untuk menentukan pemodelan matematis sistem adalah sebagai berikut:
a. Melakukan pendekatan orde 1 terhadap data empiris dengan menghitung penguatan proporsional (Kp) yang merupakan nilai keluaran (PV) pada saat mapan dibagi nilai masukan( ).
Persamaan 2.3
b. Menentukan konstanta waktu(τ) dengan mencari waktu yang diperlukan untuk mencapai 28% dari keadaan mapan (t28%) dan waktu yang diperlukan untuk mencapai 63% keadaan mapan (t63%) dengan persamaan:
Persamaan 2.4
12
c. Mencari waktu tunda(θ) dengan persamaan:
Persamaan 2.5
d. Membuat model orde 1 dengan persamaan:
Persamaan 2.6
2.2.8 Heater Listrik
Electrical heating element merupakan elemen pemanas listrik yang
banyak dipakai dalam kehidupan sehari-hari, baik dalam rumah tangga ataupun peralatan mesin industri. Elemen pemanas terbuat dari logam dengan nilai resistansi yang tinggi. Biasanya terbuat dari paduan nikel-chrome yang disebut
nichrome. Jika arus mengalir melalui elemen dengan resistansi tinggi, maka aliran
yang bekerja pada elemen ini akan menghasilkan panas. Jika arus listrik diputus, elemen secara perlahan menjadi dingin. Bentuk dan tipe dari electrical heating
elements ini bermacam-macam disesuaikan dengan fungsi, tempat pemasangan
dan media yang akan dipanaskan13.
Panas yang dihasilkan oleh elemen pemanas listrik ini bersumber dari kawat ataupun pita bertahanan listrik tinggi ( Resistance Wire) yang dialiri arus listrik pada kedua ujungnya dan dilapisi oleh isolator listrik yang mampu meneruskan panas dengan baik hingga aman jika digunakan.
Gambar 2.22 Heater listrik
13
http://myschoolsmkn3tpi.blogspot.com, “Elemen Pemanas”, diakses tanggal 13 Februari 2015
Hubungan Kalor Dan Energi Listrik
Listrik merupakan salah satu bentuk energi. Sesuai dengan hukum kekekalan energi maka energi listrik dapat diubah kebentuk lain. Salah alat yang bisa mengubah bentuk energi listrik menjadi energi kalor adalah element heater. Alat ini bisa diterapkan pada oven, setrika listrik maupun kompor listrik. Besarnya energi listrik yang diserap sama dengan energi kalor yang dihasilkan.
Energi Listrik :
W = P . t Persamaan 2.7
Energi Kalor
Q = m.c (t2 – t1) Persamaan 2.8
Menurut Hukum Kekekalan Energi dapat dirumuskan :
W = Q Persamaan 2.9
P.t = m.c (t2– t1) Persamaan 2.10
Keterangan :
W = energi listrik (Joule) P = daya listrik (Watt) Q = energi kalor (Joule)
t = waktu yang dibutuhkan (sekon) m = massa (kg)