BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini, akan dilakukan pengujian terhadap implementasi dari perancangan yang telah dilakukan pada Bab III. Adapun hasil implementasi program (berupa kode sumber) dan implementasi perangkat keras dapat dilihat pada bagian Lampiran. Pengujian dilakukan dengan membandingkan penghitungan teori dengan hasil aktual pada motor langkah.
IV.1 Pengujian Kendali Posisi
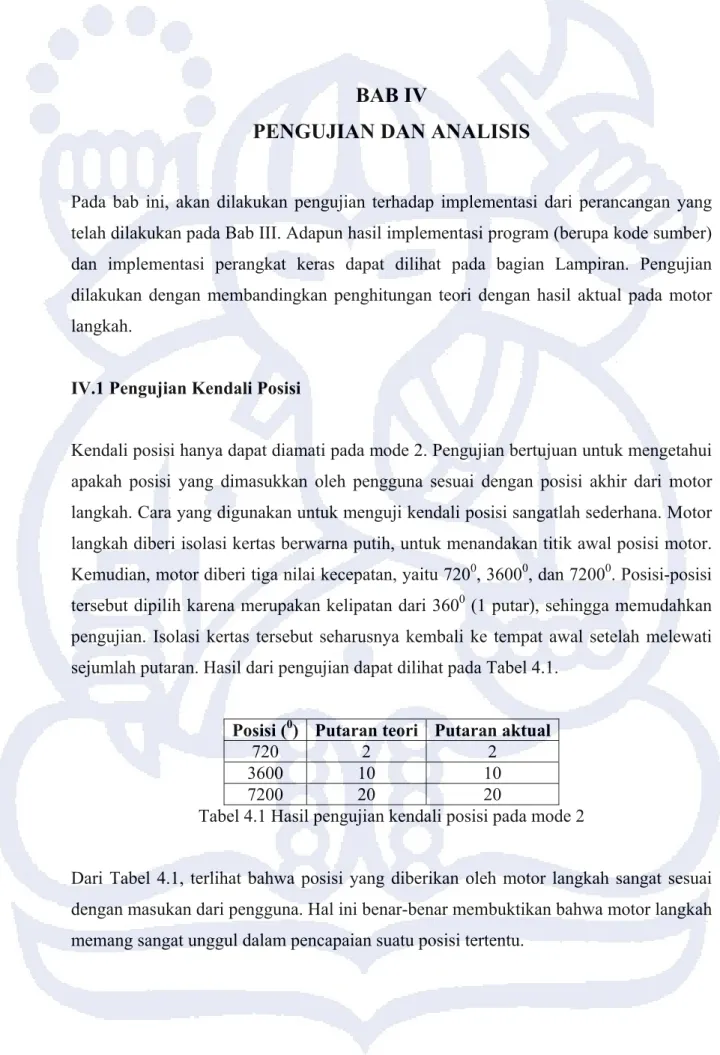
Kendali posisi hanya dapat diamati pada mode 2. Pengujian bertujuan untuk mengetahui apakah posisi yang dimasukkan oleh pengguna sesuai dengan posisi akhir dari motor langkah. Cara yang digunakan untuk menguji kendali posisi sangatlah sederhana. Motor langkah diberi isolasi kertas berwarna putih, untuk menandakan titik awal posisi motor. Kemudian, motor diberi tiga nilai kecepatan, yaitu 7200, 36000, dan 72000. Posisi-posisi tersebut dipilih karena merupakan kelipatan dari 3600 (1 putar), sehingga memudahkan pengujian. Isolasi kertas tersebut seharusnya kembali ke tempat awal setelah melewati sejumlah putaran. Hasil dari pengujian dapat dilihat pada Tabel 4.1.
Posisi (0) Putaran teori Putaran aktual
720 2 2
3600 10 10
7200 20 20
Tabel 4.1 Hasil pengujian kendali posisi pada mode 2
Dari Tabel 4.1, terlihat bahwa posisi yang diberikan oleh motor langkah sangat sesuai dengan masukan dari pengguna. Hal ini benar-benar membuktikan bahwa motor langkah memang sangat unggul dalam pencapaian suatu posisi tertentu.
Pada aplikasinya, kendali posisi motor langkah banyak sekali digunakan untuk memberikan posisi translasi (misalnya mengatur posisi kertas pada mesin fotokopi), dengan persamaan
r
s=θ. (4.1)
dengan
s adalah jarak translasi yang diinginkan
θ adalah sudut putaran motor yang harus diberikan r adalah jari-jari motor langkah
Oleh karena jari-jari motor langkah biasanya kecil, sedangkan kebutuhan translasi besar, maka jarang sekali motor langkah digunakan untuk mencapai posisi akhir yang kurang dari satu putaran. Dengan alasan itulah, semua pengujian yang dilakukan pada bab ini melibatkan nilai posisi yang lebih besar daripada satu putar.
IV.2 Pengujian Kendali Kecepatan
Untuk menguji kecepatan motor langkah, digunakan alat bantu yaitu motor DC yang dilengkapi dengan tachogenerator. Sumbu dari motor langkah disambungkan dengan sumbu motor DC, sehingga saat motor langkah berputar, motor DC pun ikut berputar. Tachogenerator akan mengubah kecepatan motor DC menjadi sebuah nilai tegangan yang kemudian dirajah (di-plot) oleh perajah (plotter). Dengan mengetahui tetapan dari tachogenerator, yaitu 41,72 rad/detik.V (pengukuran dan penghitungan dapat dilihat di Lampiran), nilai tegangan keluaran yang telah diketahui dapat diubah kembali menjadi kecepatan dengan persamaan
V Ktcg. =
ω (4.2)
dengan
ω adalah kecepatan putar motor langkah [rad/detik] Ktcg adalah tetapan tachogenerator [rad/detik.V]
Akhirnya, nilai kecepatan inilah yang dibandingkan dengan penghitungan secara teori. Kendali kecepatan terlaksana pada kedua mode, sehingga pengujian dilakukan baik untuk mode 1 maupun mode 2. Untuk mode 1, pengujian dilakukan sebanyak satu kali dengan memberikan tiga nilai kecepatan. Sedangkan untuk mode 2, pengujian dilakukan sebanyak tiga kali. Pada pengujian 1, nilai percepatan dan perlambatan adalah 1 rad/detik2. Pada pengujian 2, percepatan masih bernilai sama dengan percepatan, tetapi nilainya lebih besar daripada pengujian pertama, yaitu 3 rad/detik2. Dan pada pengujian 3, nilai percepatan berbeda dengan perlambatan. Percepatan pada pengujian 3 adalah 3 rad/detik2 dan perlambatannya adalah 1 rad/detik2.
IV.2.1 Mode 1
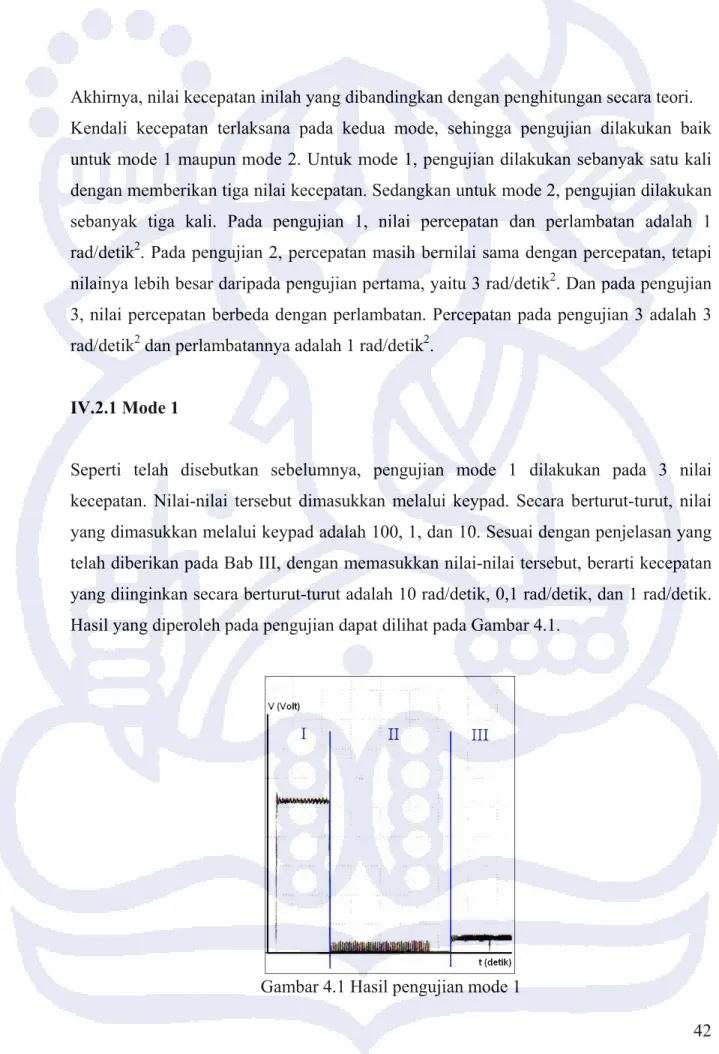
Seperti telah disebutkan sebelumnya, pengujian mode 1 dilakukan pada 3 nilai kecepatan. Nilai-nilai tersebut dimasukkan melalui keypad. Secara berturut-turut, nilai yang dimasukkan melalui keypad adalah 100, 1, dan 10. Sesuai dengan penjelasan yang telah diberikan pada Bab III, dengan memasukkan nilai-nilai tersebut, berarti kecepatan yang diinginkan secara berturut-turut adalah 10 rad/detik, 0,1 rad/detik, dan 1 rad/detik. Hasil yang diperoleh pada pengujian dapat dilihat pada Gambar 4.1.
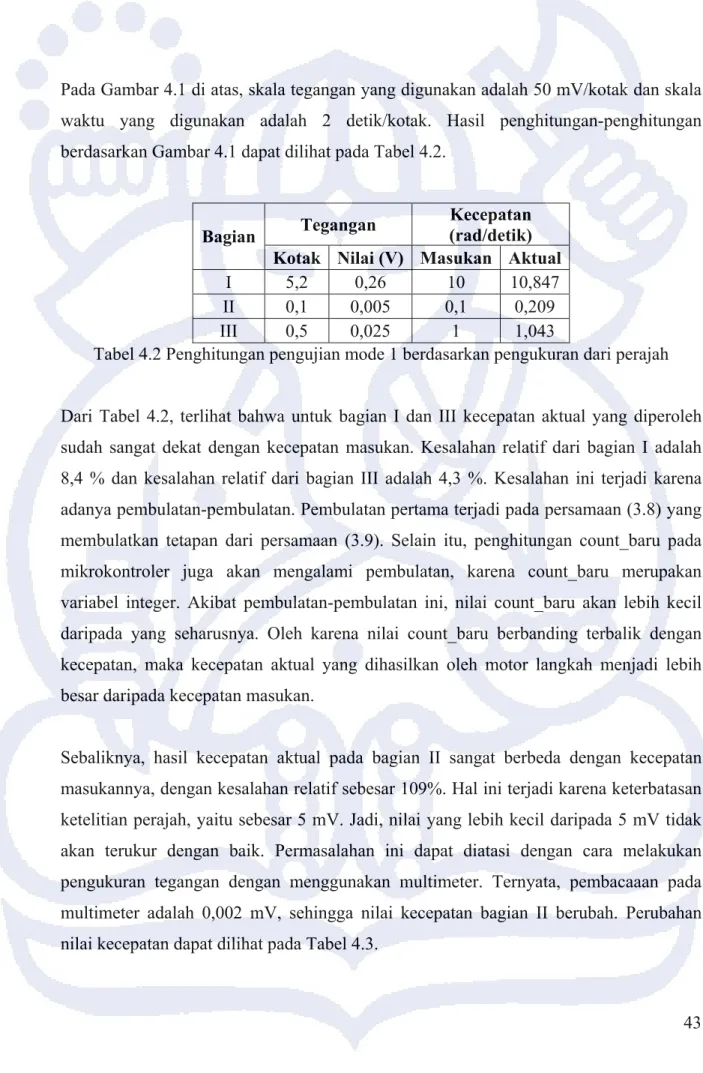
Pada Gambar 4.1 di atas, skala tegangan yang digunakan adalah 50 mV/kotak dan skala waktu yang digunakan adalah 2 detik/kotak. Hasil penghitungan-penghitungan berdasarkan Gambar 4.1 dapat dilihat pada Tabel 4.2.
Tegangan (rad/detik) Kecepatan Bagian
Kotak Nilai (V) Masukan Aktual I 5,2 0,26 10 10,847 II 0,1 0,005 0,1 0,209 III 0,5 0,025 1 1,043
Tabel 4.2 Penghitungan pengujian mode 1 berdasarkan pengukuran dari perajah Dari Tabel 4.2, terlihat bahwa untuk bagian I dan III kecepatan aktual yang diperoleh sudah sangat dekat dengan kecepatan masukan. Kesalahan relatif dari bagian I adalah 8,4 % dan kesalahan relatif dari bagian III adalah 4,3 %. Kesalahan ini terjadi karena adanya pembulatan-pembulatan. Pembulatan pertama terjadi pada persamaan (3.8) yang membulatkan tetapan dari persamaan (3.9). Selain itu, penghitungan count_baru pada mikrokontroler juga akan mengalami pembulatan, karena count_baru merupakan variabel integer. Akibat pembulatan-pembulatan ini, nilai count_baru akan lebih kecil daripada yang seharusnya. Oleh karena nilai count_baru berbanding terbalik dengan kecepatan, maka kecepatan aktual yang dihasilkan oleh motor langkah menjadi lebih besar daripada kecepatan masukan.
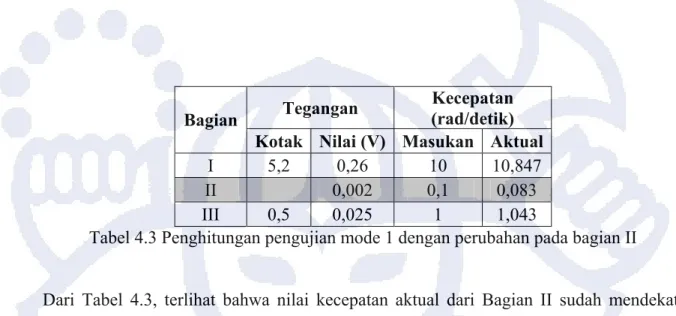
Sebaliknya, hasil kecepatan aktual pada bagian II sangat berbeda dengan kecepatan masukannya, dengan kesalahan relatif sebesar 109%. Hal ini terjadi karena keterbatasan ketelitian perajah, yaitu sebesar 5 mV. Jadi, nilai yang lebih kecil daripada 5 mV tidak akan terukur dengan baik. Permasalahan ini dapat diatasi dengan cara melakukan pengukuran tegangan dengan menggunakan multimeter. Ternyata, pembacaaan pada multimeter adalah 0,002 mV, sehingga nilai kecepatan bagian II berubah. Perubahan nilai kecepatan dapat dilihat pada Tabel 4.3.
Tegangan (rad/detik) Kecepatan Bagian
Kotak Nilai (V) Masukan Aktual I 5,2 0,26 10 10,847
II 0,002 0,1 0,083
III 0,5 0,025 1 1,043
Tabel 4.3 Penghitungan pengujian mode 1 dengan perubahan pada bagian II Dari Tabel 4.3, terlihat bahwa nilai kecepatan aktual dari Bagian II sudah mendekati kecepatan yang diinginkan, dengan kesalahan relatif sebesar 17 %. Seperti pada bagian I dan III, pada bagian II ini juga terjadi pembulatan-pembulatan. Akan tetapi, tidak seperti pada bagian I dan III, dimana nilai kecepatan aktual lebih besar daripada kecepatan masukan, nilai kecepatan aktual yang terjadi pada bagian II justru lebih kecil. Hal ini terjadi karena keterbatasan ketelitian multimeter. Apabila nilai kecepatan sebesar 0,1 dimasukkan pada persamaan (4.2), maka tegangan keluaran yang seharusnya adalah
V . 72 , 41 1 , 0 = V V 0,0024 72 , 41 1 , 0 = = (4.3)
Ketelitian multimeter yang digunakan hanyalah sampai 1 milivolt. Akibatnya, nilai yang lebih kecil dari 1 milivolt akan dibulatkan. Oleh karena itulah, tegangan yang terbaca pada multimeter adalah 0,002 V, yang 16,6% lebih kecil daripada hasil dari persamaan (4.3).
IV.2.2 Mode 2
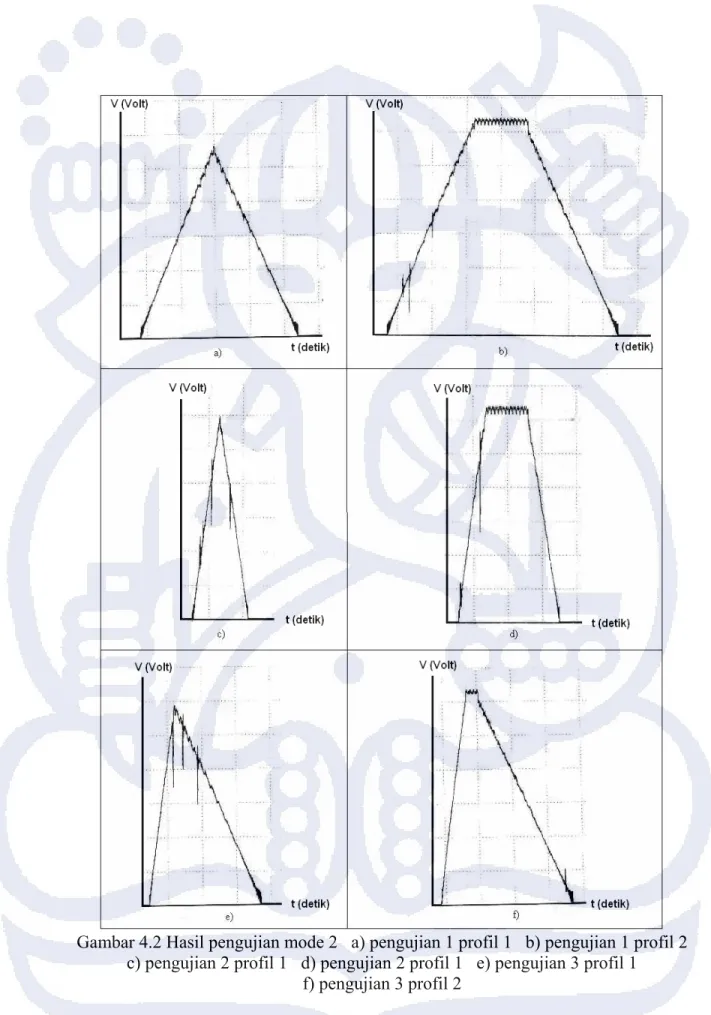
Pengujian mode 2 dilakukan sebanyak tiga kali. Posisi yang dimasukkan melalui keypad diatur supaya kedua profil kecepatan dapat diuji. Maka, seluruhnya terdapat enam hasil pengujian. Semua hasil pengujian dirajah dengan skala tegangan 50 mV/kotak dan skala waktu 5 detik/kotak.
IV.2.2.1 Pengujian 1
Pengujian 1 dilakukan dengan percepatan dan perlambatan sebesar 1 rad/detik2. Nilai ini berbeda dengan percepatan dan perlambatan perancangan pada Bab III. Sesuai dengan penjelasan pada akhir Bab III, ada beberapa variabel yang harus dihitung kembali apabila percepatan dan perlambatan berubah. Variabel-variabel tersebut adalah
1. c0, menjadi 2934
2. max_s_lim, menjadi 2486 3. accel_lim, menjadi step/2
4. decel_val untuk profil 2, menjadi –max_s_lim
Supaya tetap pada profil 1, syarat yang harus dipenuhi adalah max_s_lim > accel_lim, sehingga posisi maksimum untuk menghasilkan profil 1 adalah
2 8 , 1 / 2486 2 2486 lim _ lim _ max_ 0 posisi step accel s > > > 0 8949 < posisi (4.4)
Untuk memenuhi persamaan (4.4), posisi yang dimasukkan melalui keypad untuk menguji profil 1 adalah 72000. Hasil dari pengujian 1 untuk profil 1 dan 2 secara berurutan ditunjukkan oleh Gambar 4.2 a) dan b).
IV.2.2.2 Pengujian 2
Pengujian 2 dilakukan dengan percepatan dan perlambatan sebesar 3 rad/detik2. Perubahan variabel-variabel yang terjadi adalah
1. c0, menjadi 1994
3. accel_lim, menjadi step/2
4. decel_val untuk profil 2, menjadi –max_s_lim Posisi maksimum untuk menghasilkan profil 1 adalah
2 8 , 1 / 828 2 828 lim _ lim _ max_ 0 posisi step accel s > > > 0 8 , 2980 < posisi (4.5)
Posisi yang dimasukkan melalui keypad untuk menguji profil 1 adalah 27000. Hasil dari pengujian 2 untuk profil 1 dan 2 secara berurutan ditunjukkan oleh Gambar 4.2 c) dan d).
IV.2.2.3 Pengujian 3
Pengujian 3 dilakukan dengan percepatan sebesar 3 rad/detik2 dan perlambatan sebesar 1
rad/detik2.
Posisi maksimum untuk menghasilkan profil 1 adalah
4 8 , 1 / 828 4 828 lim _ lim _ max_ 0 posisi step accel s > > > 0 6 , 5961 < posisi (4.6)
Posisi yang dimasukkan untuk menguji profil 1 adalah 54000. Hasil pengujian 3 untuk profil 1 dan 2 secara berurutan ditunjukkan oleh Gambar 4.2 e) dan f).
Gambar 4.2 Hasil pengujian mode 2 a) pengujian 1 profil 1 b) pengujian 1 profil 2 c) pengujian 2 profil 1 d) pengujian 2 profil 1 e) pengujian 3 profil 1
Berdasarkan Gambar 4.2 di atas, dilakukan penghitungan-penghitungan yang dapat dilihat pada Tabel 4.4. Pada tabel tersebut t1 adalah waktu berhentinya percepatan (atau
sama dengan lamanya percepatan), t2 adalah lamanya perlambatan, ttot adalah waktu
keseluruhan yang dibutuhkan motor langkah untuk mencapai posisi akhir, ω& adalah 1 percepatan dan ω& adalah perlambatan. 2
1 ω& (rad/detik2) 2 ω& (rad/detik2) No Posisi (0) t1 (s) t2 (s) ttot (s) Vmaks (V) ωmaks (rad/detik)
teori aktual teori aktual
a 7200 11 11,5 22,5 0,265 11,06 1,005 0,962 b 14400 13 13 34 0,31 12,94 1 0,996 -1 -0,996 c 2700 4 4 8 0,3 12,52 3,131 -3,131 d 7200 4,5 4,5 14,5 0,31 12,94 3 2,876 -3 -2,876 e 5400 4 12,5 16,5 0,295 12,31 3,079 -0,985 f 7200 4,5 13 19 0,31 12,94 3 2,876 -1 -0,996 Tabel 4.4 Penghitungan-penghitungan dari hasil pengujian mode 2
Variabel-variabel yang dihitung pada Tabel 4.4 di atas adalah Vmaks, ωmaks, ω& aktual 1
dan ω& aktual. V2 maks dihitung dengan cara mengalikan jumlah kotak tegangan yang
terukur pada Gambar 4.2 (tidak ditulis kembali pada Tabel 4.4) dengan skala tegangan, yaitu 50 mV/kotak. ωmaks dihitung berdasarkan persamaan (4.2). Untuk menghitung
percepatan dan perlambatan, digunakan persamaan t
Δ Δ
= ω
ω& (4.6)
sehingga percepatan dihitung dengan persamaan
1 1 1 0 t t maks maks ω ω ω& = − = (4.7)
dan persamaan untuk menghitung perlambatan adalah
2 2 2 0 t t maks maks ω ω ω& = − = (4.8)
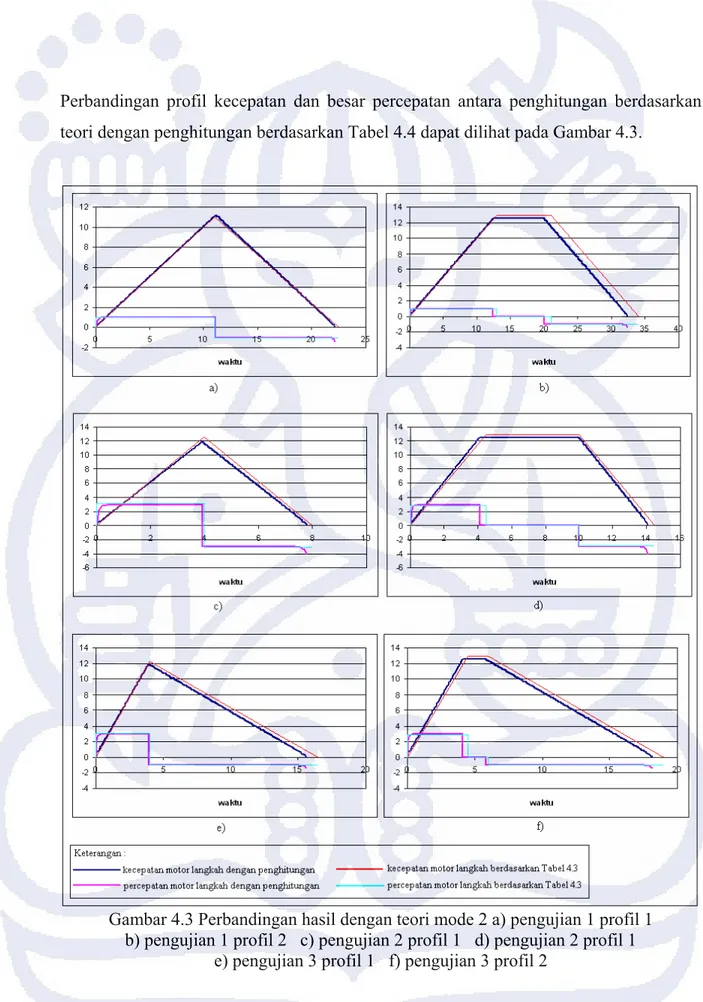
Perbandingan profil kecepatan dan besar percepatan antara penghitungan berdasarkan teori dengan penghitungan berdasarkan Tabel 4.4 dapat dilihat pada Gambar 4.3.
Gambar 4.3 Perbandingan hasil dengan teori mode 2 a) pengujian 1 profil 1 b) pengujian 1 profil 2 c) pengujian 2 profil 1 d) pengujian 2 profil 1
Dari Gambar 4.3, terlihat bahwa hasil aktual dengan teori sudah sangat dekat. Perbedaan yang terjadi terutama disebabkan oleh pembulatan-pembulatan. Tetapan pada persamaan (3.10) merupakan pembulatan dari tetapan pada persamaan (3.9). Selain itu, penghitungan yang terjadi pada mikrokontroler juga lebih banyak apabila dibandingkan dengan mode 1, sehingga semakin banyak pembulatan yang terjadi. Terlihat pula bahwa waktu yang didasarkan pada pengukuran lebih besar daripada waktu melalui hasil penghitungan. Hal ini disebabkan karena keterbatasan ketelitian perajah, yaitu 0,5 detik. Akibatnya, waktu yang terukur merupakan kelipatan 0,5 detik. Padahal, pada kenyataanya, waktu yang dibutuhkan motor langkah untuk bergerak dari langkah yang satu ke langkah berikutnya sangatlah kecil (berorde milidetik). Jika dibandingkan dengan ketelitian perajah yang 0,5 detik, perbedaanya sangat jauh. Itulah sebabnya pengukuran waktu tidak terlalu akurat.
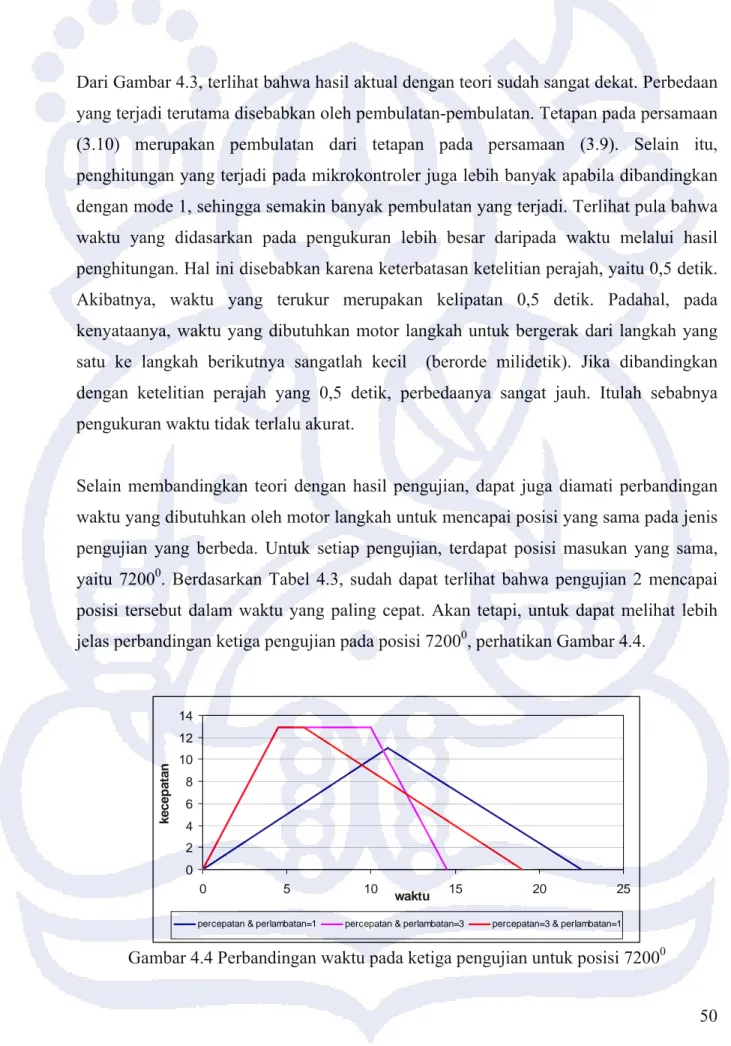
Selain membandingkan teori dengan hasil pengujian, dapat juga diamati perbandingan waktu yang dibutuhkan oleh motor langkah untuk mencapai posisi yang sama pada jenis pengujian yang berbeda. Untuk setiap pengujian, terdapat posisi masukan yang sama, yaitu 72000. Berdasarkan Tabel 4.3, sudah dapat terlihat bahwa pengujian 2 mencapai
posisi tersebut dalam waktu yang paling cepat. Akan tetapi, untuk dapat melihat lebih jelas perbandingan ketiga pengujian pada posisi 72000, perhatikan Gambar 4.4.
0 2 4 6 8 10 12 14 0 5 10 15 20 25 waktu kecep at an
percepatan & perlambatan=1 percepatan & perlambatan=3 percepatan=3 & perlambatan=1
Dari Tabel 4.4 dan Gambar 4.4, terlihat bahwa waktu tercepat terjadi pada pengujian dengan nilai percepatan dan perlambatan yang paling besar. Artinya, semakin besar percepatan dan perlambatan, semakin kecil waktu yang dibutuhkan motor langkah untuk mencapai posisi yang dimasukkan oleh pengguna. Akan tetapi, pada aplikasi, percepatan dan perlambatan tidak selalu dapat diatur pada nilai yang sangat besar. Misalnya apabila motor langkah tersebut digunakan untuk memutar benda yang rapuh, perlu dipertimbangkan batas percepatan dan perlambatan yang tidak akan merusak benda tersebut. Begitu pula pada aplikasi lainnya. Ada hal-hal yang harus dipertimbangkan untuk menentukan percepatan dan perlambatan yang digunakan.