PROPOSAL TUGAS AKHIR
PENGARUH BENTUK GELOMBANG SINUS TERMODIFIKASI (MODIFIED SINE WAVE) TERHADAP UNJUK KERJA MOTOR INDUKSI
SATU FASA PADA SISTEM PHOTOVOLTAIC
Diajukan Untuk Memenuhi Persyaratan Memperoleh Gelar Sarjana Teknik
Disusun Oleh: ROBBY FIERDAUS
NIM. 0810630090
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS BRAWIJAYA
MALANG 2012 Judul dari Proyek : Soeprapto. Ir., MT.
Calon Pembimbing : 1.
2. Malang,
KKDK Teknik Energi Elektrik
1
I. JUDUL
Pengaruh Bentuk Gelombang Sinus Termodifikasi (Modified Sine Wave) Terhadap Unjuk Kerja Motor Induksi Satu Fasa Pada Sistem Photovoltaic.
II. LATAR BELAKANG
Pengembangan dalam pembangkitan energi listrik telah sampai pada sebuah system yang dapat dikelola sendiri. Penerapan pembangkitan energi ini telah dikembangkan pada sistem pertanian yaitu pada pompa irigasi. Pompa untuk irigasi lahan pertanian telah memanfaatkan energi matahari sebagai sumber energi dengan memggunakan sistem photovoltaic. Energi listrik yang dibangkitkan oleh
photovoltaic akan melalui beberapa proses hingga dapat digunakan sebagai sumber
energi untuk pompa irigasi. Salah satunya adalah melalui proses konverter dari DC ke AC dengan menggunakan alat berupa inverter. Inverter akan menghasilkan tegangan dan arus bolak balik dengan proses Pulse Width Modulation (PWM). Konverter ini dibutuhkan karena pada pompa irigasi kebanyakan menggunakan motor AC, yaitu motor induksi satu fasa.
Inverter itu sendiri memiliki bermacam-macam jenis menurut gelombang keluarannya, yaitu inverter pure sine wave, inverter square wave, dan inverter
modified sine wave. Pada kenyataannya sistem photovoltaic tidak banyak yang
menggunakan inverter jenis pure sine wave karena harganya yang tidak ekonomis dan juga ketersedian barangnya pun cukup langka. Meskipun inverter ini sangat baik dalam mengkonversi energi dari DC ke AC sehingga tidak terdapat harmonisa dari tegangan maupun arus keluarannya seperti halnya pada tegangan PLN, inverter ini jarang sekali digunakan pada sistem photovoltaic yang setingkat perumahan. Sehingga pada sistem photovoltaic konvensional lebih banyak menggunakan inverter
modified sine wave dalam komponen inverter-nya, karena lebih mudah dalam
pembuatan serta cukup ekonomis.
Untuk inverter modified sine wave tidak akan bermasalah apabila digunakan pada beban linier seperti lampu, karena pengaruh harmonisa yang dihasilkan oleh inverter tidak akan banyak mempengaruhi kinerja dari beban linier tersebut. Akan tetapi harmonisa yang ditimbulkan akibat switching dalam inverter, akan berpengaruh pada beban-beban non-linier rumah, seperti motor-motor yang
2
digunakan pada AC, pompa air, dll. Bentuk modified sine wave ini memilki harmonisa yang cukup besar sehingga akan berdampak pada beban non-linier seperti motor. Harmonisa ini akan mempengaruhi faktor daya dari motor itu sendiri, kenaikan dari rugi-rugi daya, dan bahkan sampai menurunkan efisiensi dari sistem.
Timbulnya harmonisa akan berdampak pada perubahan frekuensi. Untuk motor dengan frekuensi yang berubah-ubah akan berpengaruh pada torsi motor itu sendiri. Yang selanjutnya akan mempengaruh dari kinerja motor.
Besarnya pengaruh dari gelombang sinus termodifikasi ini terhadap unjuk kerja motor induksi dalam sistem photovoltaic akan di evaluasi dalam skripsi ini melalui perancangan inverter sederhana dengan beban motor induksi satu fasa. Yang diharapakan dapat menjadi bahan pertimbangan untuk menentukan jenis inverter maupun penggunaan jenis-jenis beban pada sistem photovoltaic.
III. RUMUSAN MASALAH
Berdasarkan uraian pada latar belakang di atas maka pembahasan dalam skripsi ini ditekankan pada:
1. Bagaimana pengaruh gelombang sinus termodifikasi terhadap motor induksi satu fasa dalam sistem photovoltaic?
2. Bagaimana efisiensi yang terjadi saat digunakan pada beban motor induksi satu fasa?
3. Bagaimana rugi-rugi daya yang ditimbulkan oleh motor induksi satu fasa? 4. Bagaimana perubahan torsi motor induksi satu fasa yang diberi gelombang
sinus termodifikasi?
IV. BATASAN MASALAH
Berdasarkan penekanan pembahasan di atas maka ruang lingkup pada skripsi ini adalah:
1. Pemodelan inverter pembentukan modified sine wave menggunakan inverter PWM berbasis pemrograman yang sederhana.
2. Sumber DC yang digunakan untuk masukan inverter berasal dari sumber DC yang ada di Laboratorium Elektronika Daya.
3
3. Pengaturan switching pada inverter menggunakan metode pulse width
modulation (PWM).
4. Motor yang digunakan adalah motor induksi satu fasa yang berada di Laboratorium Elektronika Daya.
5. Mikrokontroler yang digunakan pada perancangan inverter sederhana adalah ATMega8535.
6. Tidak membahas filter keluaran inverter.
7. Analisis dikhususkan saat motor induksi dalam kondisi berputar.
V. TUJUAN
Penelitian ini bertujuan untuk dapat mengevaluasi pengaruh dari gelombang sinus termodifikasi (modified sine wave) terhadap unjuk kerja motor induksi pada sistem photovoltaic.
VI. SISTEMATIKA PENULISAN
Sistematika penulisan dari skripsi ini adalah sebagai berikut :
BAB I : PENDAHULUAN
Berisi tentang uraian latar belakang, tujuan, batasan masalah, rumusan masalah serta sistematika penulisan.
BAB II : TINJAUAN PUSTAKA
Berisi tinjauan pustaka atau dasar teori yang digunakan untuk dasar penelitian yang dilakukan dan untuk mendukung permasalahan yang diungkapkan meliputi teori komponen semikonduktor, teori mesin elektrik , teori mikrokontroler serta teori elektronika daya.
BAB III : METODE PENELITIAN
Berisi metode penelitian yang akan dilakukan, meliputi metode yang digunakan, obyek penelitian dan data yang diperlukan serta langkah penelitian.
4
Berisi perancangan dan perealisasian sistem yang meliputi spesifikasi, pemodelan blok-blok inverter dan pemodelan beban.
BAB V : PENGUJIAN dan ANALISIS
Berisi penjelasan tentang cara pengujian dan hasil pengujian, analisis terhadap masalah yang diajukan dalam skripsi dengan memperhatikan hasil pengujian dan data yang diperoleh.
BAB VI : KESIMPULAN dan SARAN
Berisi kesimpulan dari tujuan skripsi yang akan dibuat serta saran dari penulis.
VII. TINJAUAN PUSTAKA
Dalam sistem photovoltaic terdapat beban-beban non-linier yang sering digunakan sebagai beban dari panel surya. Sedangkan inverter yang digunakan kebanyakan inverter modified sine wave yang menghasilkan gelombang keluaran yang tidak sinusoda murni. Tinjauan pustaka yang dapat mendukung analisis terhadap beban yang non-linier meliputi modified sine wave, inverter, harmonisa, motor induksi 1 fasa sebagai beban non-linier, serta komponen2 perancangan inverter seperti mikrokontroler dan mosfet.
7.1 Modified Sine Wave
Pada awal penemuan teknologi inverter, bentuk gelombang keluaran yang dihasilkan adalah square wave. Bentuk square wave atau gelombang kotak ini dapat merusak peralatan listrik sehingga para pakar elektronika mengembangkan kembali teknologi inverter agar aman untuk peralatan listrik yaitu dari bentuk square wave menjadi modified sine wave yang aman untuk peralatan listrik. Meskipun bentuk
modified sine wave ini dapat digunakan untuk beban-beban yang memiliki kumparan
seperti pompa air, kulkas, air conditioner, dll. Bentuk ini akan meningkatkan rugi daya sistem karena terdapat harmonisa didalamnya. Karena itu untuk penyempurnaan bentuk gelombang ini, dilakukan pengembangan inverter untuk menghasilkan bentuk pure sine wave yang dapat digunakan pada peralatan listrik apa pun.
5
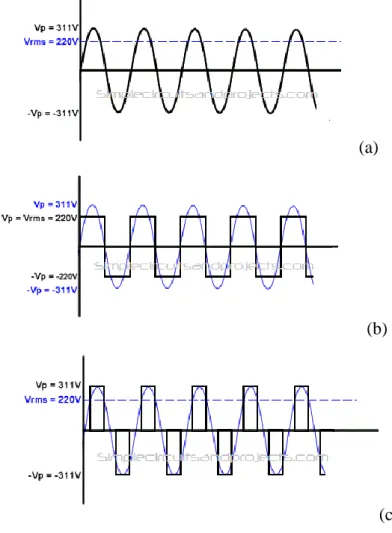
Sehingga bentuk gelombang keluaran dari inverter diklasifikasikan menjadi tiga bentuk, yaitu pure sine wave, square wave, atau modified sine wave. Dari ketiga bentuk tersebut, bentuk modified sine wave sering digunakan untuk sistem
photovoltaic. Bentuk gelombang yang tidak sinusoida murni ini memiliki harmonisa
akibat dari proses switching pada inverter. Bentuk gelombang dari ketiga jenis inverter dengan besar tegangan 220 (tegangan PLN) dapat dilihat pada gambar dibawah ini.
(a)
(b)
(c)
Gambar 1. a. Pure Sine Wave ; b. Square Wave ; c. Modified Sine Wave
7.2 Inverter
Konversi daya dari DC ke AC disebut dengan inverter. Tegangan masukan inverter dapat berasal dari baterai, fuel cell, solar cell, atau sumber DC lainnya. Frekuensi ataupun besar tegangan keluaran dari inverter bisa tetap atau
berubah-6
ubah. Variabel tegangan keluaran bisa ditentukan dengan mengubah-ubah masukan DC ( terkontrol). Macam-macam tegangan masukan inverter biasanya 120 Volt untuk frekuensi 60 Hz, 220 Volt untuk frekuensi 50 Hz, dan sebagainya.
Bentuk gelonbang tegangan keluaran dari inverter ideal adalah sinusoida Namun dalam prakteknya gelombang keluaran inverter tidak sinusoida dan mengandung harmonisa. Untuk penggunaan yang berdaya rendah sampai menengah bentuk tegangan gelombang kotak masih dapat diterima sedangkan untuk aplikasi berdaya tinggi, distorsi gelombang tegangan yang rendah sangat diperlukan.
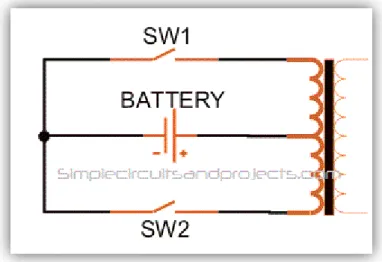
Terdapat banyak jenis inverter salah satunya adalah inverter center tab. Inverter ini memiliki konfigurasi rangkaian yang cukup sederhana, akan tetapi memiliki kekurangan karena hanya baik jika digunakan untuk daya <1kW. Untuk rangkaian sederhana dari inverter center tap dapat dilihat pada gambar dibawah ini.
Gambar 2. Rangkaian Sederhana Inverter Tap Tengah
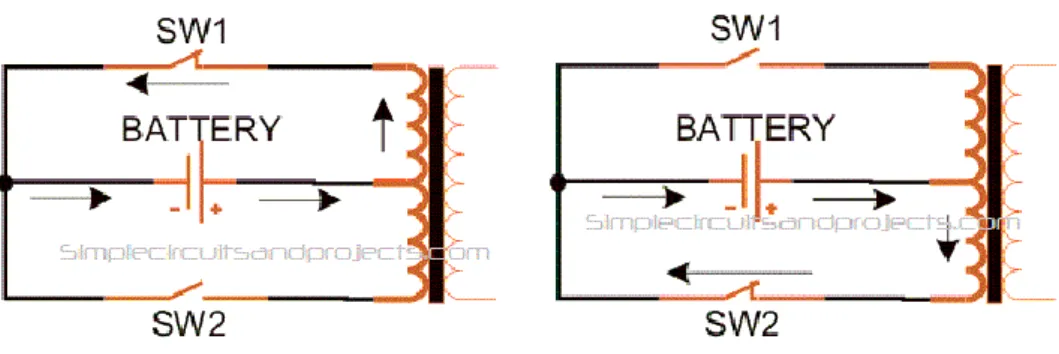
Prinsip kerja dari rangkaian ini adalah mosfet (SW1 dan SW2) akan bekerja secara bergantian atau on off bergantian. Aliran arus dari sumber DC akan mengalirkan melewati tap tengah transformator dan kembali lagi melalui mosfet yang aktif. Seperti yang terlihat pada gambar dibawah ini.
7
Gambar 3. Prinsip Kerja Inverter Tap Tengah
Jadi pada kedua MOSFET akan diberikan sebuah sinyal kotak dengan lebar dan amplitudo yang sama, yang akan di atur agar menghasilkan bentuk sinyal output seperti pada gambar dibawah ini.
Gambar 4. Sinyal Keluaran MOSFET dan Transformator
Tegangan hasil dari konfigurasi ON-OFF MOSFET akan dinaikkan dengan perbandingan n oleh transformator. Besarnya tegangan keluaran dari inverter tersebut dapat dihitung dengan rumus sebagai berikut :
√
(i)
n adalah perbandingan jumlah lilitan transformator primer/sekunder
Jika tegangan keluaran dari inverter berbentuk sinus murni, maka besarnya sama dengan :
√
( )
8
dengan : : 2 f (rad)
: Sudut fase (o)
7.2.1 Harmonisa
Cacat gelombang seperti gambar 5 yang disebabkan oleh interaksi antara bentuk gelombang sinus sistem dengan komponen gelombang lain dikenal dengan harmonisa yaitu komponen gelombang lain yang mempunyai frekuensi kelipatan integer dari komponen fundamentalnya. Pada gambar 5 terdapat gelombang fundamental (gelombang ideal), gelombang harmonisa dan gelombang real yang merupakan distorsi gelombang ideal oleh gelombang harmonisa. (Bradley, D.A, 1987)
Pada umumnya analisis terhadap sistem tenaga listrik dimodelkan sebagai suatu sistem yang linear di mana sistem tersebut terdiri dari peralatan dan komponen listrik yang pasif dengan tegangan dan frekuensi yang konstan dengan sumber berbentuk gelombang sinusoidal. Tetapi dengan perkembangan beban listrik yang semakin besar dan kompleks pada saat ini, terutama penggunaan beban-beban tak linier, akan menimbulkan perubahan pada bentuk gelombangnya.
Kebanyakan beban beban non linier menarik arus non sinusoidal walaupun disuplai dari sumber tegangan sinusoidal, dan akan menambah jumlah arus harmonisa yang menginjeksi ke dalam sistem tenaga listrik.
Gambar 5. Bentuk Gelombang Harmonisa
9
Gelombang periodik yang tidak berbentuk sinusoida murni seperti halnya
modified sine wave dapat dinyatakan dalam jumlah seri harmonisa frekuensi dasar
yang dinyatakan dengan analisis persamaan Fourier sebagai berikut :
( ) ∑ ( ) (iv) dimana :
∫ ( ) ( ) (v)
∫ ( ) ( ) ( ) (vi)
∫ ( ) ( ) ( ) (vii)
Dalam menggunakan Metode Fourier ini terdapat syarat-syarat yang harus dipenuhi agar dapat menguraikan fungsi peiodik menjadi fungsi-fungsi sinusoida dengan frekuensi, amplitude, dan sudut fase tertentu, syarat-syarat tersebut diantaranya :
1. Merupakan fungsi periodik f(ωt) = f(ωt+T) dengan T = periode
2. Merupakan fungsi kontinyu atau fungsi tak kontinyu dengan jumlah diskontinyuitas yang tertentu selama satu periode.
3. Selama selang periode, fungsi harus mempunyai harga rata-rata tertentu
Dalam satu periode T, fungsi harus mempunyai harga maksimum atau minimum yang jumlahnya tertentu.
7.2.3 Total Harmonisa Distorsi
Kualitas dari sebuah gelombang jala-jala listrik biasanya dievaluasi dengan mengikuti ketentuan dari parameter-parameter unjuk kerja. Ukuran bentuk pendekatan antara bentuk jumlah rms gelombang harmonic dengan rms komponen fundamentalnya biasa disebut total harmonisa distorsi. Dapat dinyatakan dalam arus atau tegangan dengan perumusan sebagai berikut :
10
Dimana :
Vn = Besar tegangan harmonisa ke-n (Volt) V1 = Besar tegangan fundamental (Volt)
Semakin kecil nilai THD maka semakin sedikit distorsinya. Bila nilai THD sama dengan nol berarti gelombang sinus tidak terdistorsi sama sekali.
7.3 Motor Induksi Satu Fasa
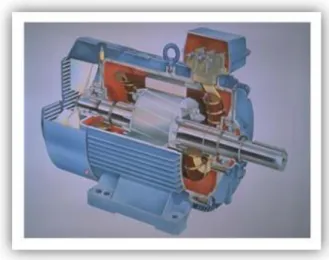
Konstruksi motor induksi satu fasa terdiri atas dua komponen yaitu stator dan rotor. Stator adalah bagian dari motor yang tidak bergerak dan rotor adalah bagian yang bergerak yang bertumpu pada bantalan poros terhadap stator. Motor induksi terdiri atas kumparan-kumparan stator dan rotor yang berfungsi membangkitkan gaya gerak listrik akibat dari adanya arus listrik bolak-balik satu fasa yang melewati kumparan-kumparan tersebut sehingga terjadi suatu interaksi induksi medan magnet antara stator dan rotor.
Gambar 6. Konstruksi Motor Induksi
Konstruksi motor induksi terdiri dari : 1. Stator, bagian motor yang diam. 2. Rotor, bagian motor yang bergerak.
3. Celah udara, adalah ruangan antara stator dengan rotor.
11
1. Rumah stator dari besi tuang.
2. Inti stator dari besi lunak atau baja silikon.
3. Alur dan gigi materialnya sama dengan inti, alur tempat meletakkan belitan. 4. Belitan stator dari tembaga.
Konstruksi rotor, terdiri dari :
Inti rotor bahannya sama dengan ini stator.
1. Alur dan gigi materialnya sama dengan inti, alur tempat meletakkan belitan. 2. Belitan rotor bahannya dari tembaga, dari konstruksi lilitan akan memberikan
dua macam rotor, yaitu rotor sangkar dan rotor belitan. 3. Poros atau as.
7.3.1 Prinsip Kerja Motor Induksi Satu Fasa
Apabila sumber tegangan dipasang pada kumparan stator, akan timbul medan putar dengan kecepatan ns.
(ix) dengan
ns : kecepatan medan putar stator (rpm) f : frekuensi sistem pada stator (Hz) p : jumlah kutub pada stator
Medan putar stator akan memotong batang konduktor pada rotor sehingga batang konduktor akan timbul gaya gerak listrik (ggl) induksi E2s.
E2s = 4,44.f2 .N2 (x)
dengan E2s merupakan tegangan induksi saat rotor berputar
Kemudian karena batang konduktor merupakan rangkaian tertutup, dengan adanya ggl E2s maka akan timbul arus. Arus yang mengalir pada medan magnet akan akan menimbulkan gaya Lorenz sebesar.
12
dengan B kerapatan medan dan L panjang rotor
Jika kopel mula yang dihasilkan oleh gaya lorenz F pada rotor cukup besar untuk mengkopel beban, rotor akan berputar searah dengan medan putar stator. Seperti yang telah dijelaskan tadi bahwa tegangan induksi timbul akibat perpotongan batang konduktor (rotor) dengan medan putar stator. Sehingga untuk terus menimbulkan tegangan induksi maka diperlukannya perbedaan relatif terhadap medan putar stator (ns) dengan kecepatan putar rotor (nr). Hal ini biasa disebut slip (s) yang dinyatakan dengan persamaan :
(xii)
Bila nr = ns yang mengakibatkan slip bernilai 0 maka tidak akan menimbulkan ggl, dan arus juga tidak akan mengalir pada batang konduktor. Dengan demikian tidak akan menghasilkan kopel. Besar torsi yang dihasilkan oleh motor dirumuskan dengan : (xiii) dengan :
Pada motor induksi satu fasa, fluks magnet yang terbentuk pada sisi stator hanya berganti arah dan tidak berputar. Sehingga harus dibentuk lilitan kedua yang terpisah dari lilitan utama untuk membentuk medan magnet baru yang tidak sefasa dengan medan magnet lilitan utama. Dan apabila motor telah berjalan, maka lilitan kedua dapat dilepas.
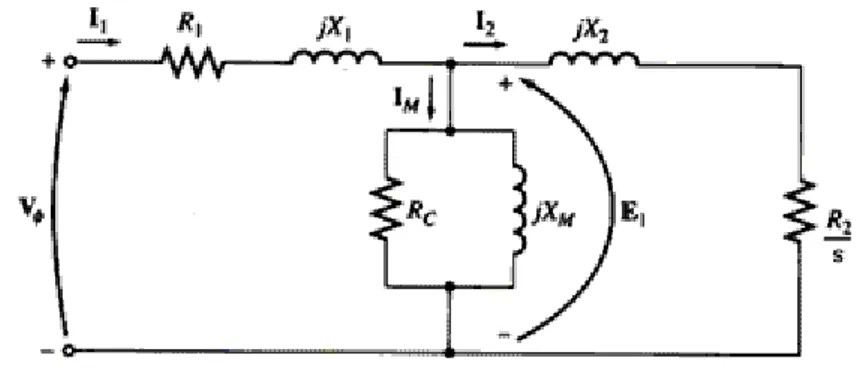
7.3.2 Rangkaian Ekivalen Motor Induksi Satu Fasa
Sebuah motor induksi dapat digambar melalui sebuah rangkaian listik yang terlihat pada gambar 7. Rangkaian ekivalen motor induksi hampir sama dengan rangkaian ekivalen transformator, dengan kumparan primer merupakan sisi stator motor induksi dan kumparan sekunder merupakan sisi rotor motor induksi. Rangkaian ini merupakan gambar rangkaian motor induksi pada sisi primer dengan
13
mengubah besaran-besaran pada sisi sekunder yang dibawa ke sisi primer melalui rasio efektif antara stator dan rotor (a).
Gambar 7. Rangkaian Ekivalen Motor Induksi
Rugi-rugi daya pada motor induksi dapat kita ketahui dengan cara mencari daya masukan dengan daya keluaran. Karena besarnya daya masukan merupakan penjumlah rugi-rugi daya dan daya keluaran motor. Dari daya keluaran dan daya masukan dari motor induksi ini, maka dapat kita ketahui efisiensi dari motor induksi ini.
Rumus mengitung daya input motor induksi :
P1 = V1.I1.cos ϕ (Watt) (xiv) dimana
P1 : Daya input (Watt) V1 : Tegangan input (Volt) I1 : Arus input (Ampere) cos ϕ : Faktor kerja
dan perumusan untuk mencari efisiensi motor induksi :
(xv)
7.4 Pulse Width Modulation (PWM)
Pulse Width Modulation merupakan sebuah tipe modulasi dimana lebar pulsa
dapat diubah-ubah sesuai dengan kebutuhan. Sebuah sinyal PWM memiliki bentuk sinyal persegi ataupun sinusoida tergantung dari karakteristik benda yang dikontrol.
14
Secara umum pembentukan sinyal PWM didapatkan dari perbandingan gelombang segitiga dengan sinyal pembanding. Perbandingan antara kedua sinyal ini yang akan menentukan sinyal output menjadi high mauupun low. Apabila sinyal pembanding lebih besar dari gelombang segitiga maka sinyal output akan menjadi
high dan jika sinyal pembanding lebih kecil dari gelombang segitiga, makan sinyal output akan low. Seperti yang terlihat pada gambar dibawah ini.
Gambar 8 : Proses Pembangkitan Sinyal PWM Sumber : Diakses pada tanggal 30 January 2012
http://digilib.ittelkom.ac.id/index.php?option=com_content&view=article&id=820:p wm-pulse-width-modulation&catid=15:pemrosesan-sinyal&Itemid=14
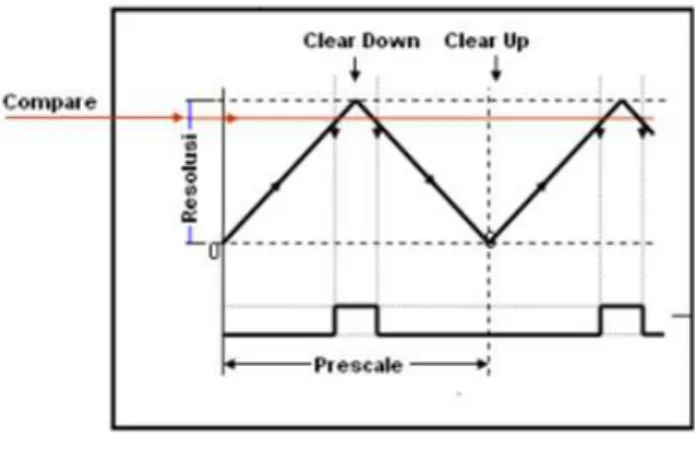
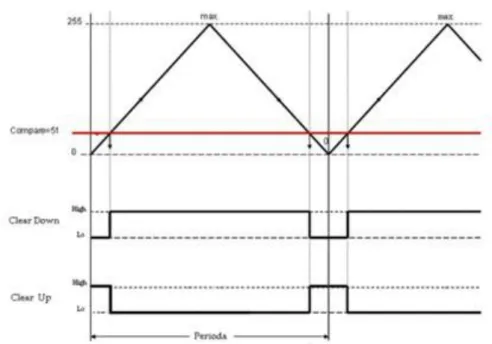
7.4.1 Pengaturan Sinyal PWM dengan Mikrokontroler
Proses pembangkitan sinyal PWM pada mikrokontroler memperhitungkan beberapa hal di antaranya nilai resolusinya. Resolusi ini merupakan jumlah variasi perubahan dalam PWM tersebut, misalnya resolusi 8 bit maka memilki variasi perubahan sebanyak 2 pangkat 8 = 256 (0 – 256). Selain itu terdapat compare (nilai pembanding), nilai ini merupakan nilai referensi duty cycle dari PWM tersebut. Nilai compare bervariasi sesuai dengan resolusi dari PWM.
Clear digunakan untuk penentuan jenis komparator apakah komparator inverting atau non-inverting. Mikrokontroler akan membandingkan posisi gelombang segitiga dengan sinyal pembanding. Misalkan PWM diatur pada kondisi clear down, berarti apabila gelombang segitiga berada dibawah compare maka PWM akan mengeluarkan logika 0. Begitu pula sebaliknya apabila gelombang segitiga berada diatas nilai compare maka PWM akan mengeluarkan logika 1. Lebar
15
sempitnya logika 1 ditentukan oleh posisi compare, lebar sempitnya logika 1 itulah yang menjadi nilai keluaran PWM dan kejadian ini terjadi secara harmonik terus-menerus. Maka dari itu nilai compare inilah yang dijadikan nilai duty cycle PWM.
Clear Up adalah kebalikan (invers) dari Clear Down pada keluaran logikanya.
Gambar 9 : Proses Penentuan Sinyal PWM pada Mikrokontroler Sumber : Diakses pada tanggal 30 January 2012
http://digilib.ittelkom.ac.id/index.php?option=com_content&view=article&id=820:p wm-pulse-width-modulation&catid=15:pemrosesan-sinyal&Itemid=14
Prescale digunakan untuk menentukan waktu perioda dari pada PWM.
Nilai prescale bervariasi yaitu 1, 8, 32, 64, 128, 256, 1024. Misalkan jika prescale diset 64 berarti timer pada PWM akan menghitung 1 kali ketika clock pada mikrokontroler (clock CPU) sudah menghitung 64 kali. Periode dari PWM dapat dihitung menggunakan rumus :
( ) (xx)
7.4.2 Perhitungan Duty Cycle PWM
Dalam pengaturan lebar pulsa on dan off pada satu peroide gelombang melalui pemberian besar sinyal pembanding dari suatu PWM akan didapat duty cycle yang diinginkan. Duty Cycle pada PWM dapat dinyatakan sebagai berikut ;
16
(xxi)
Duty cycle 100% berarti sinyal tegangan pengaturan akan dilewatkan
seluruhnya. Jika tegangan catu 100V, maka tegangan yang dirasakan 100V. pada duty cycle 50%, tegangan pada motor hanya akan diberikan 50% dari total tegangan yang ada.
7.5 Mikrokontroler ATMega 8535
Mikrokontroler ATMega 8535 merupakan mikrokontroler AVR 8 bit buatan ATMEL terintegrasi dalam satu buah keping IC (Integrated Circuit). AVR menggunakan arsitektur RISC (Reduced Instruction Set Computing) 8 bit. AVR pertama kali diperkenalkan pada tahun 1996.
AVR mengkombinasikan arsitektur RISC, memori flash internal dan jumlah register yang besar (32 buah) untuk memperoleh ukuran kode program, kinerja dan konsumsi daya yang optimal. Sebagian besar instruksi AVR dieksekusi dalam satu siklus clock. Kelebihan lainnya, arsitektur AVR dirancang untuk bekerja secara efisien menggunakan bahasa tingkat tinggi C.
AVR menggunakan konsep arsitektur Harvard dengan memori dan bus terpisah untuk data dan program. Lebar bus program pada AVR adalah 16 bit, sedangkan lebar bus data adalah 8 bit. Memori program dieksekusi dengan pipeline satu tingkat. Saat instruksi sedang dieksekusi, instruksi selanjutnya dibaca dari memori program. Konsep ini memungkinkan instruksi dieksekusi dalam tiap-tiap siklus clock.
Mikrokontroler ini terdiri atas CPU, on chip clock, timer, paralel dan serial I/O, RAM (Random Acesses Memory), dan EEPROM (Electrical Erasable Programmable Read Only Memory). Mikrokontroler ATMega8 adalah sebuah mikrokontroler CMOS 8-bit performa tinggi yang hemat daya dengan 8 kbytes downloadable Flash programmable and erasable read-only memory (Flash PEROM) dan 512 bytes EEPROM dan 1 kbytes SRAM internal.
Mikrokontroler ini dibuat menggunakan teknologi high-density nonvolatile memory milik Atmel. On-chip downloadable Flash memungkinkan memori program untuk diprogram ulang di dalam sistem melalui sebuah antarmuka serial SPI atau dengan sebuah programmer memori nonvolatile yang konvensional.
17
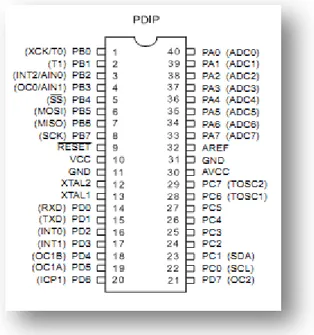
Dilengkapi dengan 6 ADC (Analog to Digital Converter) internal dengan 4 ADC 10 bit dan 2 ADC 8 bit. Untuk pin-pin dari mikrokontroler ATMega8 dapat dilihat dalam Gambar dibawah ini.
Gambar 10 : Konfigurasi Pin Mikrokontroler ATMega8535 Sumber : Sumber : www.atmel.com/literatur
Penjelasan masing-masing pin:
1. VCC : Power supply
2. GND : Ground
3. AREF : Analog input referensi untuk ADC
4. AVCC : Power supply untuk ADC
5. RESET : Merupakan pin yang digunakan untuk me-reset mikrokontroler.
6. XTAL1 : Input untuk inverting oscillator amplifier dan input bagi clock internal
7. XTAL2 : Output inverting oscillator amplifier.
8. PORT A : Port A merupakan Port I/O 8 bit dua arah dengan pull-up internal sekaligus sebagai input analog untuk ADC.
18
10. PORT C Port C merupakan Port I/O dua arah dan pin fungsi khusus yaitu TWI, komparator analog, dan Timer Oscillator.
11. PORT D Port D merupakan Port I/O dua arah
Mikrokontroler ATMega 8 dilengkapi dengan fasilitas-fasilitas sebagai berikut:
32x8 bit register serbaguna;
8 Kbyte Downloadable Flash memori;
512 byte EEPROM;
512 bytes SRAM internal;
8 ADC (Analog to Digital Converter);
4 buah PWM; Analog komparator; 32 programmable I/O; 40 pin PDIP; 44 lead TQFP; 44 pad MLF;
1 buah timer/counter 16 bit;
2 buah timer/counter 8 bit;
programmable UART (serial port);
SPI serial interface;
Programmable watchdog timer;
Internal osilator;
Frekuensi kerja 0 sampai 16 MHz; dan
Tegangan operasi antara 4,5 volt sampai 5,5 volt
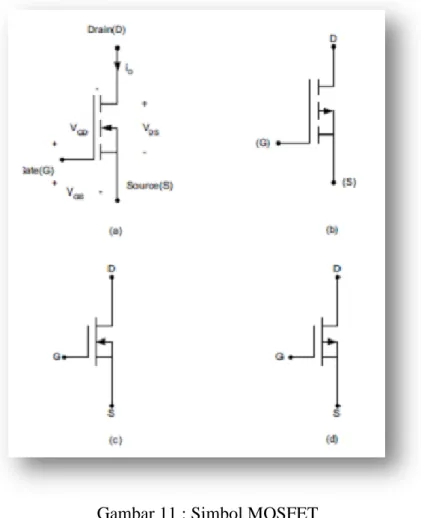
7.6 Metal Oxide Semiconductor Field Effect Transistor (MOSFET)
Tidak seperti BJT (Bipolar Junction Transistor), mosfet termasuk dalam keluarga unipolar devices, karena dalam konduksinya hanya menggunakan pembawa mayor. Simbol untuk tipe p- dan n-channel enhancement dan depletion ditunjukkan pada Gambar 12. Gambar 13 menunjukkan karakteristik i-v untuk tipe n-channel enhacement MOSFET. MOSFET adalah peralatan pensaklaran yang
19
tercepat, dengan frekuensi pensaklaran mencapai satuan MHz dan dengan rating tegangan mencapai 600V serta rating arus mencapai 40A.
Gambar 11 : Simbol MOSFET a) EMOSFET tipe N; b) EMOSFET tipe P; c) DMOSFET tipe N; d) DMOSFET tipe P
20
Gambar 12 : Karakteristik i-v untuk Tipe n-channel enhacement MOSFET a) EMOSFET tipe N; b) Karakteristik i – v
Sumber : Rashid (2001 : 81)
Tidak seperti komponen bipolar yang dikontrol arus yang membutuhkan arus basis untuk membuat arus di kolektor dapat mengalir, komponen power MOSFET adalah komponen unipolar yang dikontrol tegangan dan hanya membutuhkan arus gate yang kecil. Sehingga, hanya membutuhkan daya kontrol yang lebih kecil dari BJT. Namun, karena MOSFET bukan latching current seperti BJT, maka tegangan gate harus dijaga. Selain itu, karena hanya pembawa mayor saja yang berkontribusi pada aliran arus, MOSFET melampaui komponen lain dalam kecepatan pensaklaran, yang dapat mencapai beberapa megahertz. Jika dibandingkan lagi antara MOSFET dengan BJT, BJT memiliki kemampuan melewatkan daya yang lebih besar dan kecepatan pensaklaran yang lebih rendah, sementara MOSFET memiliki kemampuan melewatkan daya yang lebih kecil dan kecepatan pensaklaran yang relatif lebih tinggi. MOSFET memiliki resistansi
on-21
state yang lebih besar dari BJT. Perbedaan lainya adalah BJT lebih sensitif pada temperatur komponen daripada MOSFET.
VIII. METODOLOGI PENELITIAN 8.1 Studi Literatur
Studi literatur mengacu pada spesifikasi yang dibuat untuk memahami komponen dan untuk memahami teknik – teknik yang diperlukan untuk merealisasikan alat. Studi literatur meliputi prinsip kerja dari inverter PWM 1 fasa beserta Mikrokontroler ATMega8535 serta karakteristik beban non-linier yang diibaratkan sebagai motor induksi 1 fasa.
8.2 Perancangan Sistem
Rangkaian yang direncanakan dapat dilihat seperti pada gambar di bawah ini.
Gambar 13 : Circuit Diagram Rangkaian
Fungsi dari masing-masing bagian ialah :
1. Mikrokontroler digunakan untuk membangkitkan sinyal PWM untuk MOSFET.
22
2. MOSFET digunakan untuk proses switching dalam pembentukan gelombang sinus modifikasi.
3. Transformator difungsikan untuk menaikan tegangan agar sesuai dengan tegangan beban.
Penjelasan dari circuit diagram rangkaian diatas adalah :
1. Tegangan 12 Volt didapatkan dari sumber tegangan DC yang berada di Laboratorium Elektronika Daya, tegangan ini akan memberikan supply tegangan mikrokontroler dan juga menjadi tegangan referensi pada transformator.
2. Regulator LM7805 ini akan mengubah tegangan sumber 12 Volt menjadi 5 Volt sesuai kebutuhan mikrokontroler ATMega8535. Komponen R1 dan C1 sangat penting karena berfungsi untuk melindungi mikrokontroler dari lonjakan tegangan yang tiba-tiba besarnya adalah R1 = 47 ohm, C1 = 1000 mikroF. Dan untuk komponen C2 = 0,22 mikroF, C3 = 0,1 mikroF, dan C4 = 100 mikroF.
3. Mikrokontroler ATMega8535 akan memberikan sinyal PWM pada MOSFET dengan frekuensi tertentu sesuai kebutuhan secara bergantian pada MOSFET 1 dan MOSFET 2. PWM pada kedua pin di atur agar menghasilkan duty cycle sebesar 25% dengan frekuensi yang konstan, yaitu sebesar 50Hz. Sehingga kedua pin, yaitu pin 18 dan pin 19 akan menghasilkan gelombang kotak dengan periode ON sebesar 5 ms dan periode OFF sebesar 15 ms. Dan tegangan maksimum yang dihasilkan sebesar 5 Volt. MOSFET yang digunakan adalah tipe IRFZ44N dengan pembagi tegangan R2 = R3 = 470 ohm dan R4 = R5 = 22 Kohm.
4. Transformator akan menaikkan tegangan dari hasil switching MOSFET menjadi rentang tegangan mencapai 240 Volt AC. Dan daya mencapai 1000 Watt.
5. Filter akan berfungsi untuk menurunkan tingkat harmonisa dari tegangan yang dihasilkan oleh transformator. Sehingga filter diletakan pada sisi sekunder trafo. Penentuan jenis dan komponen dari filter ini, tergantung dari besar frekuensi maksimum harmonisa serta besar frekuensi yang
23
diinginkan. Karena jenis-jenis filter di kelompokan berdasarkan tanggapan frekuensinya.
6. Load atau beban yang digunakan merupakan beban non-linier. Untuk beban non-linier yang banyak dijumpai pada sistem photovoltaic diibaratkan sebagai motot induksi 1 fasa.
Bentuk gelombang hasil keluaran inverter adalah sebagai berikut :
Gambar14. Gelombang Hasil Keluaran Inverter
8.3 Pembuatan Alat 8.3.1 Perangkat Keras
Pembuatan alat dilakukan per blok rangkaian terlebih dahulu. Pembuatan alat untuk perangkat keras meliputi pembuatan PCB, pembuatan lay out, pengetesan dan pengeboran). Perakitan komponen dan penyolderan dilakukan pada PCB.
8.3.2 Perangkat Lunak
Pembuatan perangkat lunak didasarkan pada prinsip kerja rangkaian, sehingga pemrogram dirancang untuk menghasilkan gelombang kotak dengan frekuensi 50
24
Hz. Pemrograman akan mengatur agar kedua MOSFET aktif secara bergantian. Pembuatan program menggunakan bahasa C dengan software C&AVR.
8.4 Pengujian dan Pengambilan Data
Pengujian dilakukan pada perancangan alat dengan melihat hasil keluaran gelombang melalui osiloskop. Melalui osiloskop dapat dilihat sejauh mana perubahan frekuensi akibat harmonisa. Kemudian dilakukan pengambilan data besarnya frekuensi dari tiap-tiap harmonisa. Pengujian juga dilakukan pada torsi motor terhadap frekuensi akibat adanya harmonisa tersebut. Selain itu akan diambil data untuk menghitung besarnya kenaikan rugi-rugi daya yang terjadi saat ada harmonisa dari modified sine wave.
8.5 Analisis Hasil dan Pembuatan Kesimpulan
Dari persamaan (iv) akan diturunkan untuk mendapatkan tegangan harmonisa ke-n oleh gelombang yang dihasilkan inverter yaitu modified sine wave seperti pada gambar 1.c. Penurunan metode fourier tersebut dapat dilihat sebagai berikut :
( ) {
⁄ ⁄ ⁄
Dari persamaan gelombang tersebut nilai A merupakan Vp pada modified sine wave, selanjutnya : ∫ ( ) ( ) ∫⁄ ⁄ ( ) ∫⁄ ⁄ ( ) | ⁄ ⁄ | ⁄ ⁄ ∫ ( ) ( ω ) ( )
25 ∫⁄ ⁄ ( ω ) ( ) ∫⁄ ⁄ ( ω ) ( ) ( ω ) | ⁄ ⁄ ( ω ) | ⁄ ⁄ ( ( ⁄ ) ( ⁄ ) ( ⁄ ) ( ⁄ ) ) ∫ ( ) ( ω ) ( ) ∫⁄ ⁄ ( ) ( ) ∫⁄ ⁄ ( ) ( ) ( )| ⁄ ⁄ ( )| ⁄ ⁄ ( ( ⁄ ) ( ⁄ ) ( ⁄ ) ( ⁄ ))
Sehingga tegangan harmonisa ke-n untuk modified sine wave adalah sebagai berikut : ( ) ∑ ( ( ( ⁄ ) ( ⁄ ) ( ⁄ ) ( ⁄ ) ( )) ( ( ⁄ ) ( ⁄ ) ( ⁄ ) ( ⁄ )) ( ))
Persamaan tegangan ini yang akan digunakan untuk menentukan berapa besar rugi-rugi, efisiensi, dan juga torsi motor induksi satu fasa itu. Bentuk dari gelombang harmonisa yang ditimbulkan oleh modified sine wave, terlihat pada grafik dibawah ini melalui perhitungan harmonisa ke-1 sampai ke-3 menggunakan persamaan ( ) yang terlihat
26
Grafik 1. Gelombang Harmonisa ke-15 Modified Sine Wave
Gambar 15. Rangkaian Ekivalen Motor Induksi
Dari besarnya tegangan yang terjadi akibat bentuk modified sine wave maka dapat ditentukan besarnya daya masukan motor induksi satu fasa dengan rumus :
( ) ( ) ( ) -440 -330 -220 -110 0 110 220 330 440 0 45 90 135 180 225 270 315 360
v(ωt) (Volt)
ωt (°)
Gelombang Harmonisa
Harmonisa ke-1527
Gambar 16. Penyederhanaan Rangkaian Ekivalen
( )
( )
Sehingga untuk daya keluaran motor digunakan persamaan :
( ( ) ( ) ( ) ( ) ( ) ) ( )
Dan untuk pengaruh dari gelombang sinus termodifikasi terhadap torsi motor induksi, dapat diperhitungkan melalui persamaan torsi :
Dimana :
Td : Torsi (Nm)
Pout : Daya keluaran (Watt) : Kecepatan sudut putar
28
Rugi-rugi daya yang terjadi pada motor induksi ini meliputi rugi-rugi daya pada rotor dan stator. Melalui rangkaian ekivalen diatas dapat ditentukan rugi-rugi daya dengan menggunakan persamaan :
( ) ( ) ( ) ( ( ) ( ) ( ) ( ) ( ) ) ( )
Selain itu parameter yang paling penting dalam sebuah sistem adalah efisiensi dari sistem tersebut, sehingga dapat diketahui apakah sistem tersebut cukup efisien dalam kinerjanya. Karena efisiensi juga menunjukkan rugi-rugi daya yang dikonsumsi oleh sistem tersebut, disini sistem tersebut berupa motor induksi. Perhitungan efisiensi dari motor induksi adalah :
Dari data-data yang telah didapatkan selanjutnya dilakukan analisis terhadap dampak-dampak yang ditimbulkan akibat modified sine wave terhadap beban non-linier atau pada penelitian ini pada motor induksi satu fasa. Langkah pertama analisis dilakukan dengan melihat sejauh mana perubahan putaran motor induksi saat diberi tegangan dengan gelombang modified sine wave dengan saat diberi tegangan PLN (pure sine wave). Dari sini akan di analisis berdasarkan perhitungan-perhitungan pada motor induksi satu fasa, mulai dari perhitungan frekuensi sampai dengan perhitungan rugi-rugi daya. Data hasil penilitian ini akan dibuat grafik Plosses(f) yaitu rugi-rugi daya fungsi harmonisa ke-n. seperti contoh dibawah ini.
29
Gambar 17. Grafik Plosses(fn)
Sehingga dari hasil analisis terhadap grafik rugi-rugi daya diatas, akan ditarik sebuah kesimpulan dari penelitian ini.
IX. RENCANA KEGIATAN
Kegiatan penyusunan skripsi ini direncankan selama 4 bulan dengan perincian kegiatan setiap bulan seperti pada table di bawah ini.
NO Nama Kegiatan Bulan 1 Bulan 2 Bulan 3 Bulan 4
1 Pengajuan Proposal
2 Studi Literarur
3 Pemodelan Alat
4 Pengambilan Data dan Analisis
5 Penyusunan Laporan 6 Seminar Hasil 0 100 200 300 400 500 0 1 2 3 4 5 Daya Harmonisa ke-
Grafik P
losses(f
n)
30
DAFTAR PUSTAKA
Rashid, Muhammad H. 2001. Power Electronics Handbook. London: Academic Press. http://indone5ia.wordpress.com/2011/09/23/rangkaian-elektronika-daya-inverter-mengubah-tegangan-dc-ac/2/ http://www.piclist.com/images/www/hobby_elec/e_ckt30.htm http://www.simplecircuitsandprojects.com/circuits/power-inverter.html http://www.rvtechlibrary.com/electrical/sinewave.htm http://staff.ui.ac.id/internal/040603019/material/presentationinductionmotor.pdf http://www.scribd.com/doc/50045535/24/Daya-Motor-Induksi http://dc149.4shared.com/doc/y6r8hbyq/preview.html http://digilib.petra.ac.id/viewer.php?submit.x=17&submit.y=22&submit=prev&page =2&qual=high&submitval=prev&fname=%2Fjiunkpe%2Fs1%2Felkt%2F2 000%2Fjiunkpe-ns-s1-2000-23492097-10580-running-chapter3.pdf
31
DAFTAR ISI
DAFTAR ISI ... i
I. JUDUL ... 1
II. LATAR BELAKANG ... 1
III. RUMUSAN MASALAH ... 2
IV. BATASAN MASALAH ... 2
V. TUJUAN ... 2
VI. SISTEMATIKA PENULISAN ... 2
VII. TINJAUAN PUSTAKA ... 3
7.1. Battery Control Unit (BCU) ... 4
7.1.1. Charging Mode Battery Control Unit ... 5
7.2. DC-DC Converter ... 5
7.2.1. Prinsip Kerja Buck-Bosst Converter ... 7
7.2.2. Komponen dalam Buck-Boost Converter ... 8
7.2.3. Ripple Tegangan Output ... 9
7.3. Pulse Width Modulation (PWM) ... 10
7.3.1. Pengaturan Sinyal PWM dengan Mikrokontroler ... 10
7.3.2. Perhitungan Duty Cycle PWM ... 12
7.4. Maximum Power Point Tracker (MPPT) ... 12
7.5. Mikrokontroler ATMega8 ... 14
7.6. Metal Oxide Semiconductor Field Efect Transistor (MOSFET) ... 17
VIII. METODE PENULISAN ... 19
8.1. Penentuan Spesifikasi Komponen ... 19
8.2. Studi Literatur ... 19 8.3. Perancangan Alat ... 19 8.3.1. Algoritma Pengontrolan ... 21 8.4. Pembuatan Alat ... 22 8.4.1. Perangkat Keras ... 22 8.4.2. Perangkat Lunak ... 22 8.5. Pengujian Alat ... 22
IX. RENCANA KEGIATAN ... 23