BAB II
LANDASAN TEORI
2.1 Mikrokontroler
Mikrokontroller merupakan suatu komponen elektronika yang didalamnya terdapat rangkaian mikroprosesor, memori (RAM/ROM) dan I/O, rangkaian tersebut terdapat dalam level chip atau biasa disebut single chip microcomputer. Pada mikrokontroler sudah terdapat komponen – komponen mikroprosesor dengan bus – bus internal yang saling berhubungan. Komponen – komponen tersebut adalah RAM, ROM, timer, komponen I/O paralel dan serial, dan interrupt kontroller.
Adapun keunggulan dari mikrokontroler adalah adanya sistem interrupt. Sebagai perangkat kontrol penyesuaian, mikrokontroler sering disebut juga untuk menaikkan respon semangat ekternal (interrupt) di waktu yang nyata. Perangkat tersebut harus melakukan hubungan switching cepat, menunda satu proses ketika adanya respon eksekusi yang lain.
2.1.1. Mikrokontroler AT89S51
Mikrokontroler AT89S51 merupakan salah satu jenis mikrokontroler CMOS 8 bit yang memiliki performa yang tinggi dengan disipasi daya yang rendah, cocok dengan produk MCS-51. Kemudian memiliki sistem pemograman kembali Flash Memori 4 Kbyte dengan daya tahan 1000 kali write/erase(1,3).
Disamping itu terdapat RAM Internal dengan kapasitas128 x 8 bit. Dan frekuensi pengoperasian hingga 24 MHz. Mikrokontroler ini juga memiliki 32 port I/O yang terbagi menjadi 4 buah port dengan 8 jalur I/O, kemudian terdapat pula Sebuah port serial dengan kontrol serial full duplex, dua timer/counter 16 bit dan sebuah osilator internal dan rangkaian pewaktu.
2.1.2. Diagram Blok dan Konfigurasi
Adapun blok diagram dari mikrokontroler AT89S51 digambarkan pada gambar 2.1 mikrokontroler ini memiliki 40 konfigurasi pin seperti digambarkan pada gambar 2.2. Fungsi dari tiap – tiap dapat dikelompokkan menjadi sumber tegangan, kristal, kontrol, dan input-output.
Disamping itu mikrokontroler ini dapat ditambahkan sebuah minimum memori eksternal atau komponen ekternal lain. Dari kedelapan line dapat digunakan sebagai suatu unit yang berhubungan ke perangkat paralel seperti printer, pengubah digital ke analog, dan sebagainya, atau tiap line dapat mengoperasikan sendiri ke perangkat single bit seperti saklar, LED, transistor, selenoid, motor, dan speaker. Sedangkan fungsi pin dari mikrokontroler seperti berikut ini.
A. Pin 1 sampai 8
ini adalah port 1 yang merupakan saluran/bus I/O 8 bit dua arah. Dengan internal pull-up yang dapat digunakan untuk berbagai keperluan. Pada port ini juga digunakan sebagai saluran alamat pada saat pemograman dan verifikasi.
B. Pin 9
Merupakan masukan reset (aktif tinggi), pulsa transisi dari rendah ke tinggi akan me-reset mikrokontroler ini.
C. Pin 10 sampai 17
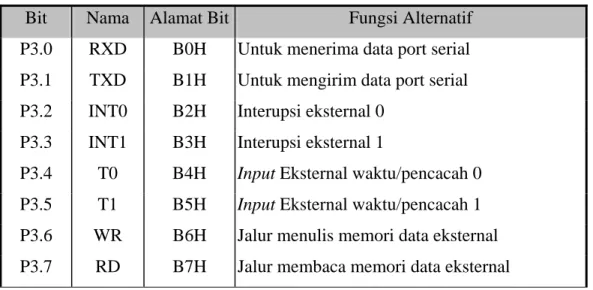
Ini adalah port 3 merupakan saluran/bus I/O 8 bit dua arah dengan internal pull-ups yang memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai, maka – ini dapat digunakan sebagai port paralel 8 bit serbaguna. Selain itu sebagian dari port 3 dapat berfungsi sebagai sinyal kontrol pada saat proses pemograman dan verifikasi. Adapun fungsi penggantinya seperti pada tabel 2.1.
D. Pin 18 dan 19
ini merupakan masukan ke penguat osilator berpenguat tinggi. Pada mikrokontroler ini memiliki seluruh rangkaian osilator yang diperlukan
pada serpih yang sama (on chip) kecuali rangkaian kristal yang mengendalikan frekuensi osilator. Karenanya 18 dan 19 sangat diperlukan untuk dihubungkan dengan kristal. Selain itu XTAL 1 dapat juga sebagai input untuk inverting oscilator amplifier dan input ke rangkaian internal clock sedangkan XTAL 2 merupakan output dari inverting oscilator amplifier
Tabel 2.1 Fungsi pengganti dari port 3.
Bit Nama Alamat Bit Fungsi Alternatif P3.0 RXD B0H Untuk menerima data port serial P3.1 TXD B1H Untuk mengirim data port serial P3.2 INT0 B2H Interupsi eksternal 0
P3.3 INT1 B3H Interupsi eksternal 1
P3.4 T0 B4H Input Eksternal waktu/pencacah 0 P3.5 T1 B5H Input Eksternal waktu/pencacah 1 P3.6 WR B6H Jalur menulis memori data eksternal P3.7 RD B7H Jalur membaca memori data eksternal
E. pin 20
Merupakan ground sumber tegangan yang diberi simbol GND.
F. Pin 21 sampai 28
ini adalah port 2 yang merupakan saluran/bus I/O 8 bit dua arah dengan internal pull-ups. Saat pengambilan data dari program memori eksternal atau selama mengakses data memori eksternal yang menggunakan alamat 16 bit (MOVX @ DPTR), port 2 berfungsi sebagai saluran/bus alamat tinggi (A8 – A15). Sedangkan pada saat mengakses ke data memori eksternal yang menggunakan alamat 8 bit (MOVX @ R1), port 2 mengeluarkan isi dari P2 pada Special Function Register.
Gambar 2.1 Blok Diagram Micro Controller 89S51
Gambar 2.2 Konfigurasi Mikrokontroller 89S51
G. Pin 29
Program Store Enable (PSEN) merupakan sinyal pengontrol untuk mengakses program memori eksternal masuk ke dalam bus selama proses pemberian/pengambilan instruksi (fetching).
H. Pin 30
Address Latch Enable (ALE)/PROG merupakan penahan alamat memori eksternal (pada port 1) selama mengakses ke memori eksternal. Pena ini juga sebagai pulsa/sinyal input pemograman (PROG) selama proses pemograman.
I. Pin 31
External Access Enable (EA) merupakan sinyal kontrol untuk pembacaan memori program. Apabila diset rendah (L) maka mikrokontroler akan melaksanakan seluruh instruksi dari memori program eksternal, sedangkan apabila diset tinggi (H) maka mikrokontroler akan melaksanakan instruksi dari memori program internal ketika isi program counter kurang dari 4096. ini juga berfungsi sebagai tegangan pemograman (VPP = +12V) selama proses
pemograman.
J. Pin 32 sampai 39
Ini adalah port 0 yang merupakan saluran/bus I/O 8 bit open colector, dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal. Pada saat proses pemograman dan verifikasi port 0 digunakan sebagai saluran/bus data. External pull-ups diperlukan selama proses verifikasi.
K. Pin 40
Merupakan positif sumber tegangan yang diberi simbol VCC.
2.1.3. Register
Mikrokontroler AT89S51 mempunyai register – register sebagai berikut:
1. Accumulator (register A)
Accumulator adalah sebuah register 8 bit yang merupakan pusat dari semua operasi accumulator termasuk didalam operasi aritmatika, operasi logika, membebani dan menyimpan serta operasi – operasi masukan.
2. Register B
Register ini memiliki fungsi yang sama dengan register A.
3. Program Counter (PC)
Pencacah program merupakan sebuah register 16 bit yang selalu menunjukkan lokasi memori dari instruksi yang akan diakses.
4. Stack Pointer (SP)
Stack Pointer merupakan sebuah register 16 bit yang mempunyai fungsi khusus sebagai penunjuk alamat atau data yang berada paling atas pada operasi penumpukkan di RAM. Penunjukan penumpukkan selalu berkurang dua setiap kali data didorong masuk kedalam lokasi penumpukkan dan selalu bertambah dua setiap kali data ditarik ke luar dari lokasi penumpukkan.
5. Program Status Word
Register ini berisi beberapa bit status yang mencerminkan keadaan mikrokontroler. Definisi dari bit – bit dalam PSW dijelaskan seperti berikut.
CY AC F0 RS1 RS2 OV - P
• Bit carry flag (CY)
Bit carry (bit ke - 8) mempunyai dua fungsi yaitu: pertama: carry akan menunjukkan apakah operasi penjumlahan mengandung carry (sisa) atau pada operasi pengurangan mengandung borrow (kurang). Apabila operasi ini mengandung carry, maka bit ini akan diset satu. Sedangkan jika mengandung borrow, maka bit ini akan diset nol. Kedua : carry dimanfaatkan sebagai bit ke delapan untuk operasi pergeseran (shift) atau perputaran.
• Bit Auxiliary Carry (AC)
Bit ini menunjukkan adanya carry (bawaan) dari bit ketiga menuju ke bit keempat pada operasi aritmatika atau dari 4 bit rendah ke 4 bit tinggi. Bit ini jarang digunakan dalam program, tetapi digunakan
oleh mikrokontroler secara implisit pada operasi aritmatika bilangan BCD.
• Bit Flag 0 (F0)
Bit ini menunjukkan apakah hasil operasinya nol atau tidak. Apabila hasil operasi adalah nol, maka bit ini diset 1, dan apabila hasil operasinya adalah tidak nol maka bit ini akan reset. Bit ini juga digunakan pada perbandingan dua buah data. Bila kedua data sama maka akan diset 1 sedangkan jika kedua data itu berbeda maka akan direset nol.
• Bit register select (RS)
RS0 dan RS1 digunakan untuk memilih bank register. Delapan buah register ini merupakan register serbaguna. Lokasinya pada awal 32 byte RAM internal yang memiliki alamat dari 00H sampai 1FH.
Register ini dapat diakses melalui simbol assembler (R0, R1, R2, R3, R4, R5, R6, dan R7). Pemilihan bank register diperlihatkan pada tabel 2.2 di bawah ini :
Tabel 2.2 Pemilihan Bank Register
RS1 RS2 Bank Lokasi Memori
0 0 0 00H – 07H
0 1 1 08H – 0FH
1 0 2 10H – 17H
1 1 3 18H – 1FH
Register R0 dan R1 dapat digunakan untuk pengalamatan tak langsung pada internal RAM.
• Bit Overflow (OV)
Bit ini menunjukkan adanya kelebihan atau kekurangan bit pada operasi penjumlahan atau pengurangan.
• Bit parity (P)
Bit ini menunjukkan paritas dari hasil operasi, jika 1 maka hasil operasinya adalah genap, dan jika 0 maka hasil operasinya adalah ganjil.
6. Power Control Register (PCON)
Register PCON berfungsi sebagai pengontrol mode kerja daripada CPU. Register PCON ini tidak dapat dialamati per bit.
7. Register Timer Mode (TMOD)
Register yang berfungsi sebagai pengontrol pemilihan mode operasi untuk timer/counter. Sedangkan untuk pengontrol kerja timer/counter adalah register timer control (TCON).
8. Serial Control Register (SCON)
Register yang berfungsi untuk mengontrol kerja port serial. Port serial pada mikrokontroler AT89S51 bersifat full duplex, yang berarti dapat mengirim dan menerima data secara bersamaan. Register penerima dan pengirim pada port serial diakses pada SBUF(serial buffer).
2.1.4. Unit Aritmatik Logika
ALU (Arithmetic Logic Unit) berfungsi melaksankan operasi-operasi aritmatik maupun logika, seperti penjumlahan, pengurangan, operasi OR, operasi NAND dan sebagianya. Hasil operasi tersebut selanjutnya disimpan kembali ke dalam accumulator. Operasi yang terjadi pada ALU berhubungan erat dengan accumulator dan bit status pada register F/PSW.
2.1.5. Sumber Pencacah Pewaktuan AT89S51
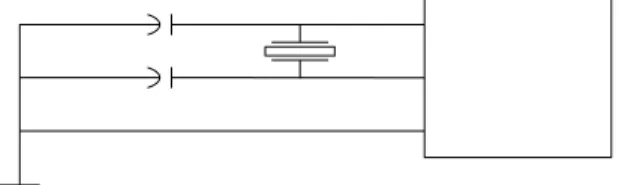
Mikrokontroller AT89S51 dilengkapi dengan sumber detak / osilator internal (on chip oscilator) yang dapat digunakan sebagai sumber clock bagi AT89S51. Untuk menggunakan osilator internal diperlukan tambahan kristal atau
resonator keramik antara pena XTAL1 dan XTAL2 dan sebuah kapasitor ke ground. Untuk kristalnya dapat digunakan frekuensi dari 3 sampai 24 MHz. Sedangkan untuk kapasitornya dapat bernilai 30 pF+10 pF. Bila menggunakan sumber clock eksternal maka XTAL 2 NC (No Connection) dan sumber dihubungkan dengan XTAL1.
Gambar 2.3 Sumber Pencacah Pewaktuan Mikrokontroler
2.1.6. Interupsi
Program yang sedang dijalankan oleh mikrokontroller AT89S51 dapat dihentikan untuk sementara dengan meminta interupsi. Apabila AT89S51 mendapat permintaan interupsi maka program counter (PC) akan diisi alamat dari vector interupsi, kemudian AT89S51 melaksanakan rutin pelayanan interupsi mulai dari alamat tersebut setelah selesai maka AT89S51 akan kembali ke pelaksanaan program utama yang ditinggalkan. Mikrokontroller AT89S51 menyediakan 6 sumber interupsi yaitu 2 buah interupsi eksternal (INT 0 dan INT 1), 3 buah interupsi timer (Timer 0, Timer 1, dan Timer 2), dan sebuah interupsi port serial.
Selain itu ada juga sebuah non maskable interrupt yaitu reset yang tidak dapat dihalangi oleh perangkat lunak. Setiap sumber interupsi dapat diprogram secara individual (sendiri-sendiri) baik pengaktifannya maupun prioritasnya. Untuk mengaktifkan atau menonaktifkan interupsi dikontrol oleh register IE (interrupt enable), sedangkan untuk tingkat prioritasnya diatur oleh register IP (interrupt priority).
2.1.7. Kode Instruksi Mikrokontroller AT89S51
Mikrokontroller AT89S51 mempunyai 256 kode instruksi. Seluruh instruksi dapat dikelompokkan dalam 4 bagian yang meliputi instruksi 1 byte sampai 4 byte.
Semua instruksi tersebut dapat dibagi menjadi lima kelompok menurut fungsinya, yaitu:
1. Instruksi Pemindahan Data 2. Instruksi Aritmatika
3. Instruksi Logika dan Manipulasi Bit 4. Instruksi Percabangan
5. Instruksi Stack, I/O, dan Kontrol.
2.1.7.1.Instruksi Pemindahan Data
Bagian instruksi ini hanya menyalin data suatu lokasi memori (sumber) ke lokasi tertentu (tujuan), tanpa terjadi perubahan isi data dari sumber. Selain lokasi memori, data juga dapat didahkan dari suatu register ke register lain, pemindahan (penyalinan) antar muka-register dan antar muka-memori.
2.1.7.2.Instruksi Aritmatika
Instruksi ini melaksanakan operasi aritmatika yang meliputi penjumlahan, pengurangan, penambahan satu (increment), pengurangan satu (decrement), perkalian dan pembagian.
2.1.7.3.Instruksi Logika dan Manipulasi Bit
Instruksi ini berhubungan dengan operasi-operasi logika pada accumulator dan manipulasi bit. Macam dari instruksi ini adalah AND, OR, XOR, perbandingan, pergeseran, dan komplemen data.
2.1.7.4.Instruksi Percabangan
Instruksi ini mengubah urutan normal pelaksanaan suatu program. Dengan instruksi ini program yang sedang dilaksanakan akan mencabang ke suatu alamat terrtentu. Instruksi ini dibedakan atas percabangan bersyarat (misalnya CJNE) dan percabangan tanpa syarat (misalnya ACALL).
2.1.7.5.Instruksi Stack, I/O dan Kontrol
Instruksi ini mengatur penggunaan stack, membaca/menulis port I/O, serta pengontrolan-pengontrolan.
2.2. LCD Matriks
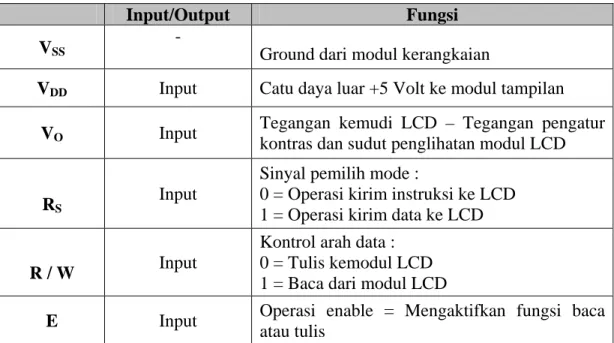
Liquid Crystal Display (LCD) matriks adalah salah satu jenis tampilan yang dapat digunakan untuk menampilkan karakter (angka, huruf dan karakter-karakter simbol lainnya) selain tampilan LCD lain dan tampilan seven segments. Keistimewaan dari LCD matriks ini dibanding LCD lain dan seven segment adalah dapat digunakan untuk menampilkan karakter-karakter simbol seperti α, β, Σ, ± , {, } dan lain sebagainya. Hal ini karena pada LCD matriks digunakan dot-matriks (titik-titik yang membentuk matriks) untuk menampilkan suatu karakter sehingga LCD matriks dapat ditampilkan lebih banyak bentuk karakter dibanding modul tampilan lainnya. Untuk menghubungkan dengan mikrokontroler telah dipersiapkan kaki-kaki pada modul LCD matriks yang secara kompatibel dapat langsung dihubungkan dengan port-port mikrokontroler. Konfigurasi kaki-kaki pada LCD matriks ini diperlihatkan pada Tabel 2.3(1,3,6,7).
Tabel 2.3 Konfigurasi Kaki LCD Matriks
Input/Output Fungsi
VSS
-
Ground dari modul kerangkaian
VDD Input Catu daya luar +5 Volt ke modul tampilan
VO Input
Tegangan kemudi LCD – Tegangan pengatur kontras dan sudut penglihatan modul LCD
RS
Input
Sinyal pemilih mode :
0 = Operasi kirim instruksi ke LCD 1 = Operasi kirim data ke LCD
R / W Input
Kontrol arah data : 0 = Tulis kemodul LCD 1 = Baca dari modul LCD
E Input Operasi enable = Mengaktifkan fungsi baca atau tulis
DB0 – DB3 Input / Output
4 Bit MSB dari bus data dua arah. Jalur-jalur ini hanya digunakan pada mode transfer data 8 bit.
DB4 – DB7 Input / Output
4 Bit MSB dari bus data dua arah. Jalur-jalur ini digunakan baik pada mode 4 bit maupun pada mode transfer data 8 bit.
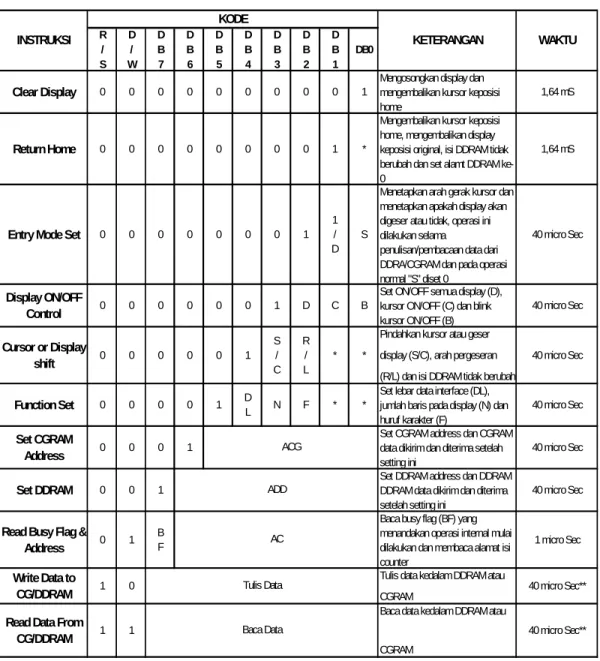
2.2.1. Set Fungsi LCD Matriks
Tabel 2.4 Daftar Instruksi Operasi LCD
R / S D / W D B 7 D B 6 D B 5 D B 4 D B 3 D B 2 D B 1 DB0 Clear Display 0 0 0 0 0 0 0 0 0 1
Mengosongkan display dan mengembalikan kursor keposisi home
1,64 mS
Return Home 0 0 0 0 0 0 0 0 1 *
Mengembalikan kursor keposisi home, mengembalikan display keposisi original, isi DDRAM tidak berubah dan set alamt DDRAM ke-0
1,64 mS
Entry Mode Set 0 0 0 0 0 0 0 1 1 / D
S
Menetapkan arah gerak kursor dan menetapkan apakah display akan digeser atau tidak, operasi ini dilakukan selama
penulisan/pembacaan data dari DDRA/CGRAM dan pada operasi normal "S" diset 0
40 micro Sec
Display ON/OFF
Control 0 0 0 0 0 0 1 D C B
Set ON/OFF semua display (D), kursor ON/OFF (C) dan blink kursor ON/OFF (B) 40 micro Sec Cursor or Display shift 0 0 0 0 0 1 S / C R / L * *
Pindahkan kursor atau geser display (S/C), arah pergeseran (R/L) dan isi DDRAM tidak berubah
40 micro Sec
Function Set 0 0 0 0 1 D
L N F * *
Set lebar data interface (DL), jumlah baris pada display (N) dan huruf karakter (F)
40 micro Sec
Set CGRAM
Address 0 0 0 1
Set CGRAM address dan CGRAM data dikirim dan diterima setelah setting ini
40 micro Sec
Set DDRAM 0 0 1
Set DDRAM address dan DDRAM DDRAM data dikirim dan diterima setelah setting ini
40 micro Sec
Read Busy Flag & Address 0 1
B F
Baca busy flag (BF) yang menandakan operasi internal mulai dilakukan dan membaca alamat isi counter
1 micro Sec
Write Data to
CG/DDRAM 1 0
Tulis data kedalam DDRAM atau CGRAM
40 micro Sec**
Read Data From CG/DDRAM 1 1
Baca data kedalam DDRAM atau
CGRAM 40 micro Sec** Baca Data ACG ADD AC Tulis Data INSTRUKSI KODE KETERANGAN WAKTU
Catatan :
* = Don’t care (nilai diabaikan), ** = Pada fOSC 250 KHz
DDRAM = Display data RAM DDRAM address berhubungan dengan posisi kursor ditampilan
CGRAM = Character generator RAM
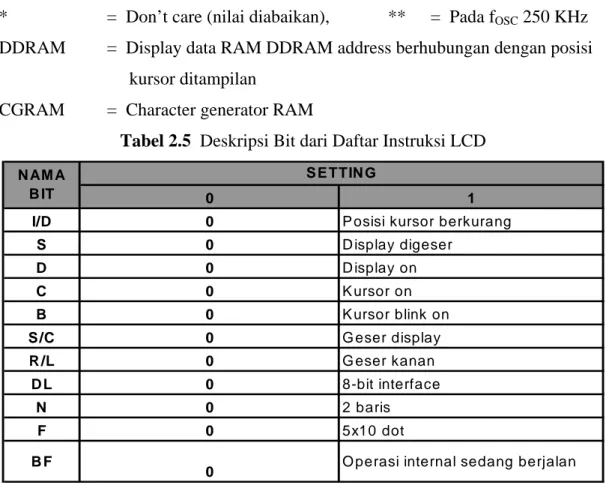
Tabel 2.5 Deskripsi Bit dari Daftar Instruksi LCD
0 1
I/D 0 P osisi kursor berkurang
S 0 D isplay digeser D 0 D isplay on C 0 K ursor on B 0 K ursor blink on S /C 0 G eser display R /L 0 G eser kanan D L 0 8-bit interface N 0 2 baris F 0 5x10 dot B F
0 O perasi internal sedang berjalan N AM A
B IT
S E TTIN G
Tabel 2.4 di atas memperlihatkan daftar instruksi dalam pengoperasian LCD. Tabel 2.5 di atas menjelaskan fungsi-fungsi bit dari tabel 2.4 jika diberi harga high (1) maupun low (0). Dalam pengopersian LCD matriks sebagai modul tampilan, diperlukan instruksi-instruksi sebagai fungsi cara pengoperasian LCD. Pengiriman instruksi-instruksi pada LCD matriks harus satu-persatu dan tidak dapat dikirim sebelum instruksi sebelumnya selesai dikerjakan. Hal ini dapat dilakukan sengan memeriksa bendera Busy (Busy Flag) atau memberikan penundaan waktu yang cukup sebelum memberikan instruksi berikutnya.
2.3 Motor Stepper
Motor stepper banyak digunakan untuk aplikasi-aplikasi yang biasanya cukup menggunakan torsi yang kecil, seperti untuk penggerak piringan disket atau piringan CD. Motor stepper adalah suatu jenis motor yang dapat digunakan untuk memindahkan sebuah benda (beban) dengan jarak perpindahan yang kecil(2,6,7).
Motor stepper merupakan motor listrik yang tidak mempunyai komutator, dimana semua lilitannya merupakan bagian dari stator. Pada umumnya motor stepper hanya mempunyai kumparan pada statornya sedangkan pada bagian rotornya merupakan magnet permanen.
Dalam hal kecepatan, kecepatan motor stepper cukup cepat jika dibandingkan dengan motor DC. Dengan model motor seperti ini maka motor stepper dapat diatur posisinya pada posisi tertentu dan/atau berputar ke arah yang diinginkan, baik searah jarum jam atau sebaliknya.
Kecepatan motor stepper pada dasarnya ditentukan oleh kecepatan pemberian data pada komutatornya. Semakin cepat data yang diberikan maka motor stepper akan semakin cepat pula berputarnya. Pada umumnya kecepatan motor stepper dapat diatur dalam daerah frekuensi audio dan akan menghasilkan putaran yang cukup cepat.
Motor stepper mengubah pulsa listrik yang diberikan menjadi gerakan rotor discret (berlainan) yang disebut step (langkah). Satu derajat-per langkah motor memerlukan 360 pulsa untuk menggerakkan melewati satu putaran. Juga ada motor mikro step dengan ribuan langkah per putaran. Ukuran kerja dari stepper biasanya diberikan dalam jumlah langkah per putaran per detik. Motor stepper biasanya kecepatan rendah dan torsi rendah mempunyai kontrol gerakan posisi yang cermat.
2.3.1. Tipe Motor Stepper
Motor Stepper dibedakan menjadi dua macam berdasarkan magnet yang digunakan, yaitu tipe permanen magnet dan variabel reluktansi. Pada umumnya motor stepper saat ini yang digunakan adalah motor stepper yang mempunyai
variabel reluktansi. Cara yang paling mudah untuk membedakan antara tipe motor stepper diatas adalah dengan cara memutar rotor dengan tangan ketika tidak dihubungkan ke supplai.
Pada motor stepper yang mempunyai permanent magnet maka ketika diputar dengan tangan akan terasa lebih tersendat karena adanya gaya yang ditimbulkan oleh permanen magnet. Tetapi ketika menggunakan motor dengan variabel reduktansi maka ketika diputar akan lebih halus karena sisa reduktansinya cukup kecil.
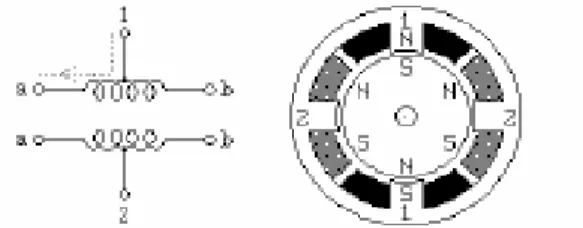
2.3.2. Motor Stepper Unipolar
Motor Stepper dengan tipe unipolar adalah motor stepper yang mempunyai 2 buah lilitan yang masing-masing lilitan ditengah-tengahnya diberikan sebuah tap seperti pada gambar 2.6.
Gambar 2.4 Motor Stepper Unipolar
Motor ini mempunyai step tiap 30o dan mempunyai dua buah lilitan yang didistribusikan bersebrangan 180o diantara kutub pada stator. Sedangkan pada rotornya menggunakan magnet permanen yang berbentuk silinder dengan mempunyai 6 buah kutub, 3 kutub selatan dan 3 buah kutub utara. Sehingga dengan konstruksi seperti ini maka jika dibutuhkan ke presisian dari motor stepper yang lebih tinggi dibutuhkan pula kutub-kutub pada stator dan rotor yang semakin banyak pula. Pada gambar 2.4, motor tersebut akan bergerak setiap step sebesar 30o dengan 4 bit urutan data (terdapat dua buah lilitan dengan tap, total lilitan menjadi 4 lilitan).
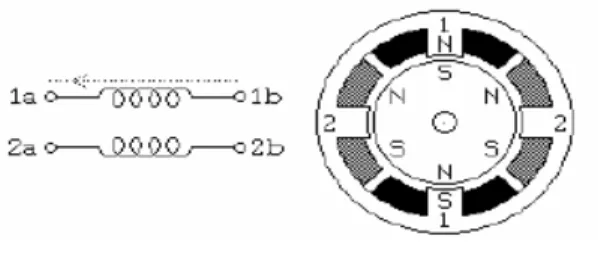
2.3.3. Motor Stepper Bipolar
Motor dengan tipe bipolar ini mempunyai konstruksi yang hampir sama dengan motor stepper tipe unipolar namun tidak terdapat tap pada lilitannya, seperti tampak pada gambar 2.5.
Gambar 2.5 Motor Stepper Bipolar
Penggunaan motor dengan tipe bipolar ini membutuhkan rangkaian yang sedikit lebih rumit untuk mengatur agar motor ini dapat berputar dalam dua arah. Biasanya untuk menggerakkan motor stepper ini membutuhkan sebuah driver motor yang sering dikenal sebagai H Bridge. Rangkaian ini akan mengontrol tiap-tiap lilitan secara independen termasuk dengan polaritasnya untuk tiap-tiap lilitan.
2.3.4. Mengendalikan Motor Stepper
Secara teoritis, sebuah motor langkah berukuran kecil dapat digerakkan secara langsung oleh mikroprosesor. Satu derajat-per langkah motor memerlukan 360 pulsa untuk menggerakkan melewati satu putaran. Dalam kenyataannya, arus dan tegangan yang dapat dikeluarkan oleh mikroprosesor terlalu kecil untuk menggerakkan sebuah motor langkah kecil. Sebagai perbandingan, gerbang – gerbang tipe TTL dalam mikroprosesor hanya mampu mengeluarkan arus dalam orde mili – ampere dan tegangan antara 2 sampai 2,5 volt. Sementara itu, untuk menggerakkan motor langkah dibutuhkan arus yang cukup besar (dalam orde ampere) dengan tegangan berkisar 5 – 24 volt.
Untuk mengatasi masalah tersebut, diperlukan sebuah piranti tambahan yang dapat memenuhi kebutuhan arus dan tegangan yang cukup besar itu, yaitu dengan menambahkan rangkaian penggerak. Ukuran kerja dari motor stepper biasanya
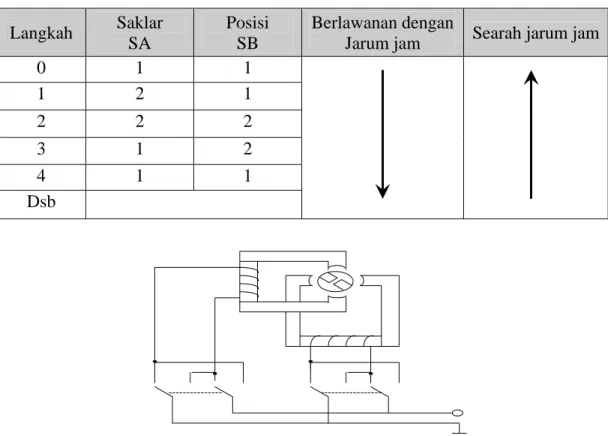
biasanya diberikan dalam jumlah langkah per putaran per detik. Motor stepper biasanya kecepatan rendah dan torsi rendah mempunyai kontrol gerakan posisi yang cermat. Gambar 2.6 merupakan rangkaian motor untuk mengkombinasikan urutan langkah dan tabel 2.6 menggambarkan kontrol urutan langkah untuk satu putaran penuh berdasarkan pada gambar 2.6. Jumlah langkah per putaran ditentukan dengan jumlah pasang kutub pada rotor dan stater. Makin banyak jumlah kutub pada kedua belah pihak makin banyak per putaran dari rotor.
Tabel 2.6 Kontrol Urutan Langkah Untuk Satu Putaran
Langkah Saklar SA
Posisi SB
Berlawanan dengan
Jarum jam Searah jarum jam 0 1 1 1 2 1 2 2 2 3 1 2 4 1 1 Dsb
Gambar 2.6 Rangkaian Motor Untuk Mengkombinasikan Urutan Langkah
2.4 Infra Merah
Cahaya infra merah merupakan cahaya yang tidak tampak. Jika dilihat dengan spektroskop cahaya maka radiasi cahaya infra merah akan nampak pada spektrum elektromagnet dengan panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya infra merah ini akan tidak tampak oleh mata namun
radiasi panas yang ditimbulkannya masih terasa atau dideteksi. Pada dasarnya komponen yang menghasilkan panas juga menghasilkan radiasi infra merah termasuk tubuh manusia maupun binatang. Cahaya infra merah, walaupun mempunyai panjang gelombang yang sangat panjang tetap tidak dapat menembus bahan – bahan yang tidak dapat melewatkan cahaya yang nampak sehingga cahaya infra merah tetap mempunyai karakteristik seperti halnya cahaya yang nampak oleh mata.
Bahan – bahan yang dapat menghasilkan infra merah antara lain : - LED (Light Emitting Diode) infra merah.
- Lampu Tungsten. - Lampu Busur Xenon.
- Lampu Infra Merah dengan bola kaca. - Lampu infra merah dengan lampu quarts.
Yang paling umum digunakan untuk meradiasikan infra merah adalah jenis LED Infra merah karena mempunyai keuntungan sebagai berikut :
- Relatif lebih kuat dan tidak mudah rusak jika ada gangguan mekanis. - Konsumsi arus sangat kecil (15mA hingga 25mA).
- Dengan tegangan relatif rendah (tegangan maju 1,6 Volt hingga 2,4 Volt) LED sudah dapat bekerja.
- Peralatan sensor infra merah banyak dijual dipasaran dan harganya terjangkau.
- Bentuknya lebih kecil dibandingkan dengan jenis lainnya.
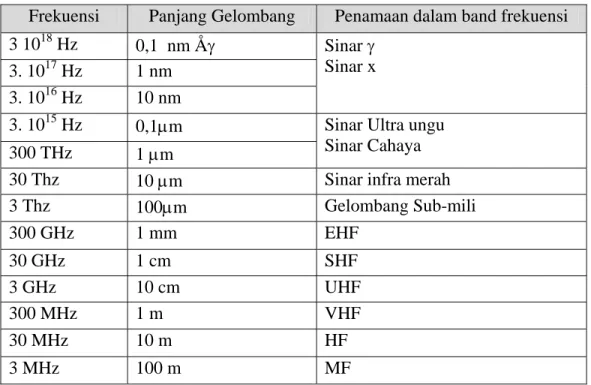
Berdasarkan frekuensinya serta panjang gelombang maka terbagilah nama-nama band frekuensi pada tabel 2.7. Semua gelombang elektromagnetik mempunyai medan magnetik dan elektrik serta merambat dengan sangat cepat. Didalam ruang hampa, gelombang elektromagnetik merambat dengan kecepatan 3 x 108 m/s. Dalam media padat kecepatan gelombang berbeda-beda tergantung pada bahan pemandu gelombang. Frekuensi ditentukan oleh sumber pemancar dan tidak berubah bila cahaya berjalan dari satu bahan ke bahan yang lain.
Tabel 2.7 Penggolongan band Frekuensi
Frekuensi Panjang Gelombang Penamaan dalam band frekuensi 3 1018 Hz 0,1 nm Åγ 3. 1017 Hz 1 nm 3. 1016 Hz 10 nm Sinar γ Sinar x 3. 1015 Hz 0,1μm 300 THz 1 μm
Sinar Ultra ungu Sinar Cahaya
30 Thz 10 μm Sinar infra merah
3 Thz 100μm Gelombang Sub-mili 300 GHz 1 mm EHF 30 GHz 1 cm SHF 3 GHz 10 cm UHF 300 MHz 1 m VHF 30 MHz 10 m HF 3 MHz 100 m MF
Cahaya Infra merah sebagai gelombang datar mempunyai beberapa sifat seperti refleksi (pemantulan) dan refraksi (pembiasan), seperti halnya cahaya tampak. Cahaya infra merah dapat memantul bila mengenai cermin dan dapat menembus bahan gelas (kaca). Akan tetapi dikarenakan infra merah beroperasi pada frekuensi tinggi maka dibutuhkan kondisi line of sight (LOS) pada proses perambatannya lurus tanpa halangan. Bila ada halangan maka sinyal yang dikirim tidak akan sampai kepada penerima. Ini merupakan salah satu sifat dari gelombang elektromagnetik frekuensi tinggi.
Pada kenyataannya gelombang inframerah ini dapat mengalami gangguan – gangguan interferensi seperti halnya dengan menggunakan gelombang radio. Cahaya dari lampu filamen dan lampu flourecent intensitas tinggi serta sinar matahari yang ada di sekitar rangkaian dapat mempengaruhi kerja rangkaian pemancar – penerima infra merah.
1. Pemilihan LED inframerah yang radiasinya besar dan penggunaan reflektor.
2. Penyekatan photodetektor dari sumber – sumber cahaya luar. 3. Pengguan photodetektor yang sensitivitasnya tinggi.
2.4.1 Sumber Cahaya Infra Merah
Sumber cahaya infra merah bekerja sebagai pemancar cahaya yang membawa informasi. Sumber cahaya tersebut harus memenuhi beberapa persyaratan yang diperlukan. Pertama, sumber tersebut mempunyai keluaran cahaya yang berintensitas cukup tinggi sesuai kebutuhan. Kedua, sumber cahaya harus mudah dimodulasi oleh isyarat informasi. Ketiga, cahaya yang dihasilkan harus bersifat monokromatis. Namun pada kenyataannya, sumber cahaya tidak hanya memancarkan cahaya pada satu gelombang saja, tetapi pada suatu rentan panjang gelombang yang di sebut lebar spektral. Semakin kecil lebar spektral sumber semakin koheren. Sumber yang memancarkan cahaya pada satu panjang gelombang (lebar spektral nol) adalah monokromatis sempurna.
Sumber cahaya infra merah yang digunakan untuk alat pemancar adalah yang dibangkitkan dari light emitting diode ( LED ) yang merupakan piranti opto elektronik. LED adalah suatu semi konduktor dioda p-n yang memancarkan cahaya dalam daerah panjang gelombang antara infra merah sampai ultra violet. LED mempunyai lebar spektral dari 20 nm – 100 nm. LED mempunyai karakteristik yang sama dengan dioda penyearah, perbedaannya jika pada dioda penyearah energi keluar sebagai panas, sedangkan pada LED energi keluar sebagai cahaya. Intensitas cahaya yang dihasilkan LED rendah sehingga biasanya hanya digunakan untuk sistem komunikasi jarak pendek, misalnya dalam ruangan
Radiasi cahaya yang dipancarkan LED tergantung pada materi dan susunan dioda p-n. Bahan semi konduktor yang sering dipakai untuk LED misalnya :
2. GaAsP (Gallium Arsenid Phosphide) meradiasikan cahaya merah dan kuning.
3. GaP (Gallium Phosphide) meradiasikan cahaya merah dan kuning. Radiasi bebagai bahan LED dapat dilihat pada tabel 2.8. di bawah ini.
Tabel 2.8 Radiasi Berdasarkan Bahan LED dan Panjang Gelombang
Yang Dihasilkan
Material Formula Eg(eV) λ(nm)
Gallium phospide GaP 2,2 550
Alumunium Arsenid Al As 2,0 620
Gallium Arsenid GaAs 1,4 870
Indium Phospide In P 1,3 930
Indium Gallium Phospide In Ga As 0,95 – 1,24 1000 - 1300 Alumunium Gallium Arsenid Al Ga As 1,4 – 1,6 770 - 870
2.4.2 Cara Kerja LED Infra Merah
Prinsip dasar dari LED ini adalah merupakan hubungan PN (PN Junction) yang memancarkan radiasi infra merah apabila hubungan PN ini dihubungkan secara bias maju (forward bias). Simbol yang umum digunakan untuk LED infra merah ditunjukkan pada gambar 2.7 dan rangkaian pengoperasian LED untuk memancarkan cahaya apabila arus melaluinya pada gambar 2.8(2,6,7).
K A
Gambar 2.7 Simbol LED Infra Merah
Apabila pada Anoda diberikan tegangan lebih positif daripada katodanya, maka LED akan mengalirkan arus. Sebagai reaksi dari semikonduktor adalah terjadinya perpindahan elektron dari tipe ”N” menuju tipe ”P” serta perpindahan hole dari tipe ”P” ke tipe ”N” pada pita valensinya. Akibat dari proses ini terjadi rekombinasi antara elektron dan hole sambil melepaskan energi yang berupa pancaran cahaya. Apabila diberi bias maju, energi elektron yang mengalir melewati tahanan sambungan diubah langsung menjadi energi cahaya. Karena LED adalah dioda, maka arus akan mengalir apabila LED dihubungkan dengan bias maju. LED harus dioperasikan di dalam ukuran kerja tegangan dan arus yang tertentu untuk mencegah kerusakan yang tidak dapat diubah lagi. Sebagian besar LED membutuhkan 1.5 sampai 2.2 V untuk memberi bias maju dan dapat mengatasi dengan aman arus sebesar 20 sampai 30 mA. LED biasanya dihubungkan seri dengan tahananyang membatasi tegangan dan arus pada nilai yang dikehendaki.
2.4.3 Fotodioda (Detektor Infra Merah)
Fotodioda adalah dioda yang sangat peka terhadap energi cahaya, yang digunakan untuk menangkap atau menerima radiasi dari pancaran infra merah. Pada keadaan normal, fotodioda mempunyai sifat seperti dioda biasa, yang hanya mampu menghantarkan arus listrik dari anoda ke katodanya disertai dengan tahanan balik yang besar. Namun pada saat menerima cahaya, maka tahanan baliknya akan mengecil dan akan timbul arus balik sehingga fotodioda akan berlaku sebagai dioda yang dibalik.
Semua dioda sambungan PN sensitif terhadap cahaya. Konstruksi dasar dari fotodioda diperlihatkan pada gambar 2.9. Energi cahaya lewat melalui lensa yang mengekspos sambungan. Fotodioda dirancang beroperasi pada mode bias-maju. Pada alat ini arus bocor bias-mundur meningkat dengan peningkatan level cahaya. Harga arus umumnya adalah dalam rentang mikroampere. Fotodioda mempunyai waktu respon yang cepat terhadap berbagai cahaya(2,6,7).
Gambar 2.9 Rangkaian Fotodioda dan Konstruksi Fotodioda
2.5 Catu Daya
Untuk mengoperasikan rangkaian Alat akses lift menggunakan kartu RFID berbasis mikrokontroler AT89S51 ini diperlukan sumber daya DC. Fungsi dari catu daya adalah menyediakan asipan daya ke sistem yang berupa tegangan dan arus DC. Pada alat ini digunakan catu daya yang keluarannya masing-masing adalah 5 Vdc yang digunakan sebagai masukan mikrokontroler dan 12 Vdc yang digunakan untuk mengaktifkan relay dan motor DC. Catu daya ini menggunakan regulator IC LM7805 yang mempunyai keluaran 5 Vdc dan regulator IC LM7812 yang mempunyai keluaran 12 Vdc. Fungsi dari regulator-regulator ini adalah untuk membatasi tegangan yang akan didistribusikan, sehingga alat ini dapat bekerja dengan baik.