Tugas Individu me-Review Jurnal Mata Kuliah Penginderaan Jauh Kelautan Dosen Pengampu: Dr. Vincentius P. Siregar. DEA
PENENTUAN KEDALAMAN PERAIRAN DENGAN CITRA SATELIT
BERESOLUSI TINGGI BERDASARKAN TIPE DASAR
Richard P. Stumpf1 dan Kristine Holderied
Disampaikan Ulang Oleh :
ULIL AMRI (NRP. C552130021)
Pada tanggal 15 Januari 2014
JURUSAN TEKNOLOGI KELAUTAN
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
BOGOR
PENENTUAN KEDALAMAN PERAIRAN DENGAN CITRA SATELIT
BERESOLUSI TINGGI BERDASARKAN TIPE DASAR
Richard P. Stumpf dan Kristine Holderied
NOAA National Ocean Service, Pusat Pemantauan Pesisir dan Assessment, 1305 East-West Highway rm 9115, Silver Spring, Maryland 20910
Mark Sinclair
Tenix LADS Corporation, Mawson Park, Australia Selatan, 5095, Australia
Abstrak
Sebuah algoritma standar untuk menentukan kedalaman perairan dengan sensor pasif sudah ada, tetapi membutuhkan lima parameter dan tidak melibatkan kedalaman dimana bagian bawah/kolom air memiliki albedo (rasio (perbandingan) sinar pantulan terhadap sinar jatuh (datang) sangat rendah. Untuk mengatasi masalah ini, kami mengembangkan solusi empiris menggunakan rasio reflectances yang hanya memiliki dua parameter dan dapat diterapkan pada lapisan low-albedo. Dua Algoritma tersebut adalah The Standart Linier Transform and The New Ratio Transform. Kedua Logaritma tersebut dibandingkan melalui analisis citra satelit IKONOS terhadap LIDAR batimetri. Koefisien untuk rasio Algoritma disetel secara manual untuk beberapa kedalaman dari peta laut agar linier, dilakukan menggunakan regresi linier berganda terhadap LIDAR tersebut. Kedua algoritma mengkompensasi variable bawah jenis dan albedo (pasir, parttikel, alga, karang) dan pada kedalaman kurang dari 10-15 m. Namun, linear transform tidak bisa membedakan variable tersebut jika kedalamananya > 15 m di seluruh wilayah studi atol. Rasio transformasi di perairan jernih pada kedalaman > 25 m menunjukkan stabilitas yang lebih besar antara daerah yang berbeda. Hal ini juga menunjukan sedikit lebih baik dalam menggambarkan tingkat kekeruhan dari transformasi linear. Rasio algoritma sedikit rumit dan tidak selalu memadai dalam mengatasi morfologi halus (struktur yang lebih kecil dari 4-5 piksel) dalam air kedalaman >15-20 m. Secara umum, rasio transformasi lebih unggul dari transformasi linear.
Pendahuluan
Sejak penggunaan pertama foto udara untuk perairan dangkal, telah diakui bahwa kedalaman air bisa diestimasi dengan beberapa cara oleh penginderaan jauh. Teori yang dikembangkan oleh Lyzenga (1978, 1981) dan dikembangkan oleh Philpot (1989) dan Maritorena et al. (1994) menunjukkan validitas, dan beberapa masalah yang terlibat dengan menggunakan penginderaan jauh pasif untuk penentuan kedalaman perairan. Penggunaan dua atau lebih band memungkinkan dapat memisahkan variasi kedalaman pada Albedo bawah, tapi kompensasi kekeruhan bisa menimbulkan masalah. Meskipun optik sistem-sistem pasif terbatas
Commented [UAH1]: Apa saja para eter ya….??? 1.
2. 3. 4. 5.
Lima parameter tersebut tidak ditemukan didalam tulisan ini
Commented [UAH2]: Teori awal
dalam penetrasi mendalam dan dibatasi oleh kekeruhan, penggunaan data satelit tersebut mungkin menjadi satu-satunya cara yang layak untuk mengkarakterisasi karang, baik luasan atau wilayah terumbu karang. Selain kebutuhan yang jelas untuk Informasi batimetri di daerah terpencil, pemetaan terumbu karang dan karakterisasi potensi pemutihan (bleaching) membutuhkan informasi pada kedalaman air. Terumbu karang menurut sifatnya sangat dipengaruhi oleh struktur fisik dari lingkungan mereka, dan informasi kedalaman air merupakan hal mendasar untuk mengetahui discriminating dan karakteristik habitat terumbu karang, seperti patch reef, spur-and-groove, and seagrass beds. Pengetahuan kedalaman air juga memungkinkan estimasi Albedo bawah, yang dapat meningkatkan pemetaan habitat (Mumby et al. 1998). Pengetahuan tentang struktur rinci bagian bawah membantu dalam pengelompokan peran dan kualitas terumbu karang sebagai lingkungan hidup jenis ikan. Namun, daerah terumbu karang yang luas di lautan tersebut memiliki sedikit data spasial batimetri (terbatas) karena kesulitan memperoleh akurasi dan soundings di daerah terumbu terpencil. Metode estimasi batimetri langsung dari citra satelit pasif akan meningkatkan kemampuan kami untuk memetakan daerah ini.
Dalam rangka untuk memetakan lingkungan terumbu karang, data spasial beresolusi tinggi diperlukan dalam penelitian ini karena secara horisontal skala spasial relatif kecil dan hasilnya sangat penting penting untuk struktur ekologi vertikal dalam lingkungan patch reefs, spur-and-groove, mini-atolls, dan sebagainya. Pemetaan skala halus variabilitas akan meningkatkan karakterisasi habitat, baik untuk karang dan berbagai spesies yang hidup di terumbu karang. Sampai saat ini, informasi tersebut hanya ada dua pilihan: pengukuran udara ditanggung (foto dan hyperspectral) dan citra satelit multispektral (biasanya Landsat). Meskipun Pesawat dapat menyediakan data resolusi tinggi, baik spasial atau spektral, biaya tinggi dan masalah penyebaran membatasi penggunaannya untuk pemetaan regional yang komprehensif di daerah terpencil. Land-sat, khususnya Landsat-7 ditingkatkan mapper tematik (ETM), menawarkan cakupan global terumbu karang, tetapi hanya dengan lapangan 30-m pandang. Dengan peluncuran resolusi tinggi sensor IKONOS pada tahun 1999 dan QuickBird pada tahun 2002, 4-m (atau lebih baik) bidang citra multispektral menjadi tersedia dari
luar angkasa, menyediakan sumber daya baru untuk pengembangan pemetaan dan pemantauan program untuk terumbu karang di lokasi pemantauan. Sistem ini menyediakan data multispectral dengan tiga band terlihat (biru, hijau, merah), yang dapat menggambarkan foto udara, dan satu band near Infra-Red (dekat-IR). Penelitian ini memfokuskan pada citra IKONOS, namun, metode estimasi kedalaman yang sama dapat diterapkan untuk Citra Landsat karena adanya kesamaan dalam pita spektral (Tabel 1).
Table 1. Perbandingan Band Spektral IKONOS dengan Landsat-7 ETM
Warna spectral Band Spektral (nm)
IKONOS Landsat-7
Biru 445-515 450-520
Hijau 510-595 530-610
Red 630-700 630-690
Inframerah-dekat 760-850 780-900
Algoritma batimetri standar memiliki teoritis der-ivation (Lyzenga 1978) tetapi juga mencakup empiris tun-ing sebagai bagian yang tak terpisahkan dari proses estimasi kedalaman. Sekarang lebih baik untuk meminimalkan tala tersebut, khususnya untuk remote daerah mana bentik dan kualitas air parameter dapat sulit untuk mengukur atau memperkirakan. Makalah ini membahas algoritma batimetri alter-asli dan dua alamat dasar masalah-masalah dalam penerapan algoritma batimetri untuk pemetaan terumbu karang : (1) stabilitas algoritma dengan tetap co-efficients dalam dan di antara atol dan (2) perilaku algoritma dalam menggambarkan kedalaman relatif dan absolut pada berbagai skala.
Bahan dan metode
Lokasi Penelitian
Daerah kajian dalam Penelitian ini mencakup dua atol terumbu karang di Barat Laut Pulau Hawaii. Gugusan pulau ini membentang lebih dari 1.800 km dari utara Pasifik dari Pulau Nihoa pada 1620W hingga atoll Kure di 178.50W. Daerah
ini mencakup dua National Wildlife Refuges, a Hawaiian State Wildlife Sanctuary, and the new U.S. Northwestern Hawaiian Islands Coral Reef Ecosystem Reserve, yang diusulkan untuk penunjukan sebagai Nasional AS Marine Sanctuary. Ada 10 atol muncul dan terumbu di beberapa perairan dangkal. Daerah karang dan yang
Commented [UAH5]: Tuning : menyetel
Commented [UAH6]: Tujuan dari penelitian
termasuk menjadi bank areas >7,000 km2 daerah kurang dari 25 depa (45 m)
(kedalaman maksimum absolut terdeteksi dengan remote sensing pasif dan demarkasi batas untuk beberapa diatur kegiatan-kegiatan dalam Reserve), menjadikannya kawasan terumbu karang perairan dangkal terbesar di bawah yurisdiksi langsung AS. Disini Daerah yang dibahas dua atol dibahas di sini, Kure Atoll, Pearl dan Hermes Reef (selanjutnya disebut Pearl), yang terletak hampir 2.000 km dari Honolulu. Lingkungan perairan dangkal dari dua atol ini cukup besar di daerah tersebut, dengan luasan 100 km2 di Kure dan 500 km2 di Pearl. Kure Atoll
merupakan sebuah pulau tempat adanya stasiun US Coast Guard Loran yang berfungsi untuk memantau laguna. Selain itu, di luar koridor sempit untuk pulau utama, banyak terumbu Kure tidak dipetakan karena data detail tidak mencukupi untuk menjamin kepercayaan dalam navigasi. Bahkan dengan keterbatasan ini, Kure memiliki informasi mendalam lebih dari Pearl, di mana sepertiga dari laguna tidak memiliki informasi batimetri sama sekali, dan grafik hanya menampilkan bentuk umum dari labirin mini-atol dan garis luas reticulated terumbu dalam laguna.
Atol memiliki substrat bervariasi dari pasir untuk perkerasan untuk hidup karang, dengan penutup yang mencakup berbagai kepadatan ganggang dan karang kecil. Pasir biasanya seperti karang dan putih dengan albedo sangat tinggi di daerah energi yang lebih tinggi. Dengan meningkatkan proporsi kerikil karang dan batu, dan sedimen cenderung kelihatan cokelat atau cokelat. Pavement biasanya abu-abu coklat seperti zaitun, bervariasi dari rendah ke tinggi sifat berkerut, dan sering ditutupi dengan berbagai densities ganggang. Di daerah di mana karang ditemukan pada kepadatan tinggi di Kure dan Pearl, Porites compressa (finger coral) adalah sebagian besar spesies umum, dengan karang dominan lainnya termasuk Montipora capitata (karang beras), Porites lobata (lobus karang), Montipora flabellata (coral beras biru), dan Pocillopora meandrina (kembang kol karang). Tutupan alga meliputi varietas merah, coklat, dan makroalga hijau, serta berserabut rumput ganggang. Rataan terumbu biasanya didominasi oleh menatah-ing alga, dengan beberapa ganggang hijau (misalnya, Halimeda sp.).
Model
Commented [UAH8]: Nama Lokasi pertama
Commented [UAH9]: Pearl, = Nama lokasi setelah Kure
Commented [UAH10]: Pavement = trotoar..??
Metode estimasi kedalaman menggunakan refleksi untuk setiap band citra satelit, dihitung dengan sensor file kalibrasi dan dikoreksi untuk efek atmosfer. Pantulan air, Rw, yang meliputi bagian bawah di mana air dangkal optik,
didefinisikan sebagai
………… 1
dimana Lw adalah pancaran cahaya meninggalkan air, Ed adalah downwelling radiasi memasuki air, dan ƛ is spektral pita. Lw dan Rw mengacu pada nilai-nilai di
atas permukaan air. Rw dihasilkan melalui koreksi total pantulan RT untuk aerosol
dan reflektansi permukaan, seperti yang diperkirakan oleh band inframerah dekat, dan untuk hamburan Rayleigh Rr (Persamaan 2).
………… 2
Y adalah konstanta untuk mengoreksi variasi spektral (setara untuk eksponen Angstrom dalam Gordon et al. [1983]), subscript i menunjukkan saluran terlihat, dan subscript IR menunjukkan Inframerah Dekat channel. RT ditemukan dari
Persamaan. 3.
………… 3
LT adalah (total) cahaya diukur pada satelit, E0 adalah konstanta matahari, r
adalah jarak bumi-matahari dalam satuan unit astronomi, Ɵ0 adalah sudut zenith
matahari, dan T0 dan T1 adalah koefisien masing-masing transmisi untuk
matahari-bumi dan matahari-bumi-satelit.
namun pemisahan koreksi aerosol (dengan skala ratusan meter) dari specular koreksi pantulan permukaan (dengan skala puluhan meter) untuk penggunaan yang lebih umum mungkin diperlukan data IKONOS. Meskipun IKONOS tidak memiliki kalibrasi onboard, kalibrasi postlaunch telah ditetapkan oleh Vendor komersial, Ruang Pencitraan. Perbandingan tambahan dengan Landsat-7, yang memiliki kalibrasi onboard, seperti Seaviewing Wide Field of View Sensor (SeaWiFS), mungkin membantu dalam kalibrasi untuk pekerjaan di masa depan. Residual miscalibration akan menghasilkan pilihan perubahan model atmosfer dan pada tingkat yang lebih rendah, dalam koefisien empiris dipilih untuk mengestimasi algoritma kedalaman.
Batimetri
Linear transform: Eksponensial atenuasi cahaya dengan kedalaman dalam kolom air dengan perubahan yang cepat diungkapkan oleh Hukum Beer (Persamaan 4).
………… 4
K adalah koefisien atenuasi dan z adalah kedalaman. Setiap anal-ysis cahaya dengan kedalaman harus memperhitungkan fungsi exponensial penurunan cahaya dengan kedalaman. Lyzenga (1978) menunjukkan bahwa hubungan reflektansi yang diamati (atau radiance) untuk kedalaman dan albedo bawah dapat digambarkan sebagai :
………… 5
dimana R∞ adalah reflektansi kolom air jika air yang optik dalam, Ad adalah albedo
bawah, Z adalah kedalaman, dan g adalah fungsi dari koefisien atenuasi menyebar untuk kedua downwelling dan cahaya upwelling. Persamaan 5 dapat belakang berkisar untuk menggambarkan kedalaman dalam hal reflectances dan Albedo (Persamaan 6).
………… 6
Estimasi kedalaman dari sebuah band tunggal dengan menggunakan Persamaan. 6 akan tergantung pada albedo Ad, dengan penurunan Albedo
Commented [UAH12]: Metode perhitungan untuk mendapatkan Hasil Bathimetri
diperkirakan mengakibatkan peningkatan kedalaman. Lyzenga (1978, 1985) menunjukkan bahwa dua band bisa memberikan correction untuk Albedo dalam mencari kedalaman dan dibuat dari Persamaan. 6 solusi linear dalam Pers. 7.
………… 7
dimana
………… 8
Konstanta a0, ai, dan aj biasanya ditentukan dari regresi linier berganda (atau
teknik yang sama). Setiap solusi untuk kedalaman dari sistem pasif, variasi dalam air kejelasan dan variasi spektral dalam penyerapan menimbulkan tambahan komplikasi (Philpot 1989; Van Hengel dan Spitzer 1991). The linear mengubah solusi di atas memiliki lima variabel yang harus ditentukan secara empiris: R∞(ƛi),
R∞(ƛj), a0, ai, dan aj. arus menyesuaikan lima koefisien empiris bisa untuk daerah
yang luas ATIC-masalah, bahkan dengan variasi yang relatif kecil dalam kondisi kualitas air. Selain itu, ketika bagian bawah albedo rendah, seperti yang dapat terjadi dengan makroalga padat atau rumput laut, kemudian Ad kurang dari R∞.
Akibatnya, kedalaman tidak dapat ditemukan tanpa menggunakan algoritma yang sama sekali baru, karena X tidak ditemukan jika (Rw-R∞) adalah negatif (logaritma
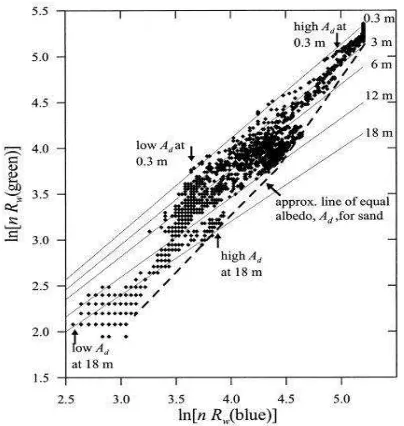
Fig. 1. Log transformation used for ratio algorithm with data from Kure Atoll. The lines of constant depth are also lines of fixed ratio (0.3 m is also the blue to green ratio of 0.975; 18 m is a ratioof 1.251). Depths were assigned to the constant ratio lines using the tuning described in this paper. The dashed line shows the approxi-mate values for a sand bottom that has the same albedo at all depths. The attenuation of light with depth means that features have lower Rwin deeper water, regardless of their intrinsic albedo. A decrease in albedo causes values to move down the lines
of constant ratio. ‘‘High Ad’’ indicates carbonate sand of nominally similar albedo
at both 0.3 and 18 m. ‘‘LowAd’’ indicates similar albedo over dense algal cover at
both depths.
Rasio Transform:
Masalah pemetaan daerah perairan dangkal dengan reflektansi signifikan lebih rendah daripada yang berdekatan, perairan dalam memberikan motivasi awal untuk mengembangkan algoritma alternatif. Karena kita tertarik memetakan di daerah terumbu karang relatif besar dan terpencil, kami juga mencari solusi alternatif yang memiliki sedikit parameter-parameter, sehingga membutuhkan penyetelan kurang empiris dan memiliki potensi menjadi lebih kuat lebih variabel habitat bawah.
Band masing-masing penyerapan cahaya pada perairan berbeda, setiap band akan memiliki nilai deret hitung lebih rendah dari yang lain. Karena itu, sebagai
nilai-nilai log berubah dengan kedalaman, rasio akan berubah (Gambar 1). Dengan meningkatnya kedalaman, sementara reflektansi dari kedua band menurun, ln (Rw)
dari band dengan tinggi penyerapan (hijau) akan menurun secara proporsional lebih cepat dari ln (Rw) Dari band dengan penyerapan rendah (biru). Jadi, rasio biru ke
hijau akan meningkat. Perubahan rasio juga akan memberikan kompensasi secara implisit untuk variabel jenis kedalaman. Perubahan Albedo bawah mempengaruhi kedua band sama (lih. Philpot 1989), tetapi perubahan secara mendalam mempengaruhi pita absorpsi tinggi lagi. Dengan demikian, perubahan rasio karena kedalaman jauh lebih besar daripada yang disebabkan oleh perubahan Albedo di bawah, menunjukkan bahwa albedoes bawah berbeda pada kedalaman konstan masih akan memiliki rasio yang sama (Gambar 1). Jika kondisi rasio ini berlaku, kita akan berharap bahwa rasio akan mendekati kedalaman independen dari Albedo bawah dan hanya perlu ditingkatkan untuk kedalaman yang sebenarnya, yaitu :
………… 9
Dimana m1 adalah nilai konstan untuk skala rasio kedalaman, n adalah
konstanta tetap untuk semua bidang, dan m0 adalah offset untuk kedalaman 0 m
(Z=0), analog dengan a0 dalam Pers. 7. Tetap nilai dari n dalam persamaan 9 dipilih
untuk memastikan bahwa kedua logaritma akan positif dalam kondisi apapun dan bahwa rasio akan menghasilkan respon linear dengan kedalaman.
Algoritma rasio diperiksa ulang terhadap hasil model dari Lubin et al (2001) untuk mengevaluasi solusi empiris. Lubin et al. (2001) membuat simulasi top of atmosphere radiances untuk band Landsat 1 dan 2 untuk jenis dasar yang berbeda. Radiances ini dikurangi menjadi reflectances air dengan menggunakan Pers. 1-3, maka Persamaan. 9 digunakan untuk memperkirakan kedalaman (Gambar 2). Dua jenis dasar dari Lubin et al. (2001) dengan berbeda albedo bawah diperiksa: pasir (Ad=41% pada 500nm) dan alga bentuk karanag (Ad=17 % pada 500 nm). Satu set
tunggal koefisien, m1 dan m0, yang dioptimalkan untuk meminimalkan kesalahan
analisis lebih lanjut enunjukkan bahwa perhitungan kedalaman tidak sensitif (error rms < 0,4 m) sampai tiga kali lipat perubahan nilai n (n Antara 500 sampai 1.500).
Fig. 2. Depths determined from the top-of-atmosphere radianc-es modeled by Lubin et al. (2001).X-axis shows depths input into the Lubin et al. (2001) model. Y-axis shows depths retrieved from the ratio algorithm using Lubin’s modeled radiances and Eqs. 1–3 and 9 from this paper.
Meskipun satu bisa membangun berbagai empiris algoritma yang dengan berbagai kombinasi pita, termasuk reflektansi tanpa log transform, semua akan membutuhkan lebih parameter dan tuning lebih kompleks daripada solusi rasio Pers. 9 (atau algoritma linear dalam hal ini).
Evaluasi dan Pengembangan
Data Satelit: Satelit IKO-NOS diluncurkan pada bulan September 1999 oleh komersil penjual, Ruang Pencitraan. Satelit memiliki dua sen-sors: satu pankromatik dengan 1-m bidang nominal pandang dan satu multispektral dengan 4-m bidang nominal pandang saat melihat pada titik nadir. Instrumen ini adalah sensor yang pushbroom mengumpulkan 11- km petak hingga 1.000 km panjang. Kelipatan (pendek) petak daerah dapat dikumpulkan pada orbit yang sama karena satelit memiliki kemampuan menunjuk. Sensor panchro-matic mengamati cahaya
dari hijau ke dekat-IR dan memberikan informasi kepada kedalaman sekitar 6 m. Sensor multispektral memiliki empat band, spektral mirip ke Landsat (Tabel 1), dengan 11-bit digitalisasi di setiap jalur. Instrumen sensitivitas nominal sekitar empat kali lipat lebih besar dari Landsat-7 ETM. Citra dapat diposisikan dalam 15 m dengan parameter orbital.
Tuning : tuning dari algoritma linear mengikuti teknik Lyzenga (1985). R∞ itu dianggap Berwin air optik dalam. Koefisien pada Persamaan. 7 yang menghalangi-ditambang melalui regresi linier multivariat untuk semua LIDAR tersebut data antara 0 dan 12 m untuk seluruh transek (5Kure 2). Awalnya, kami disetel untuk berbagai kedalaman yang lebih besar tetapi menemukan hasil sig-nificantly buruk.
Rasio mengubah disetel menggunakan sounding dari peta laut untuk Kure. Posisi pada grafik bahari untuk daerah tersebut terletak didasarkan pada data lokal astronomi ob-dipertahankan selama survei tahun 1961, yang dapat ratusan meter dari posisi yang berbeda berdasarkan pada Dunia saat ini Geodetic Survey, 1984 (WGS-84) datum, yang digunakan untuk kedua LIDAR dan IKONOS. Untuk mengatasi masalah datum, posisi grafik bergeser sehingga fitur handal yang terletak di dalam 20 m dari posisi mereka dalam citra IKONOS. Coefficients m1 and m0 dalam Pers. 9 diperoleh dari perbandingan nilai citra diturunkan dengan grafik kedalaman dari pantai, tiga datar daerah kedalaman yang berbeda di Kure (3, 8, dan 12 m) dan satu miring daerah (at, 16 m). Soundings Lidar tidak digunakan dalam tuning dari algoritma rasio. (The manual tuning untuk memetakan soundings dicoba juga untuk mengubah linear, tetapi hasilnya kalah dengan regresi linier berganda dan ditinggalkan.) Koefisien yang dihasilkan untuk kedua metode kemudian diterapkan pada semua citra di kedua Kure dan Pearl.
Energy cahaya hijau ditangkap kembali oleh penerima hijau dan digitasi untuk mendapatkan kedalaman. Ketinggian pesawat ditentukan oleh infra-merah, yang dilengkapi oleh inersia referensi tinggi. Posisi pesawat itu didasarkan pada Global Positioning System (GPS) pengukuran oleh postprocessing terhadap stasiun GPS Ashtech terletak di referensi dikenal di Midway Island. Jumlah kesalahan diharapkan untuk horisontal po-sition dari laser yang terdengar adalah 4 m untuk misi ini. Posisi dari bagian bawah ditentukan secara mutlak terhadap WGS-84 ellipsoid yang digunakan untuk penentuan posisi, dan bathymetry ditentukan dengan membandingkan keuntungan dari air permukaan dan bagian bawah. Penetrasi air maksimum (di mana return dilaporkan) dalam air jelas dalam hal ini daerah melebihi 60 m. Survei bertemu Standar Hydro-grafis Internasional untuk akurasi order 1. presisi vertical diukur kedalaman air relatif adalah, 5 cm, seperti yang ditunjukkan dengan perbandingan crossline. Untuk menentukan tinggi relative berarti air rendah yang lebih rendah, datum standar untuk batimetri, koreksi pasang surut untuk Midway Island diaplikasikan (80 km dari Kure dan 130 km dari Pearl) karena tide gauge yang tidak hadir baik di Kure atau Pearl. Kesalahan sisa dari pasang ketidakpastian dapat diharapkan, 15 cm, yang lebih halus dari resolusi vertikal 30-cm dicapai dengan satelit deteksi.
disregard-ed; the ratio method does not necessarily perform better under cloud shadows than the linear method.
Hasil
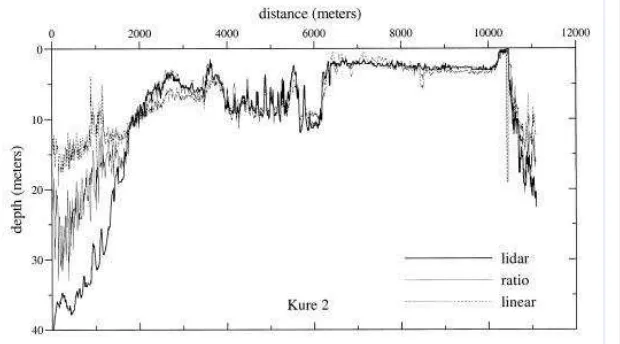
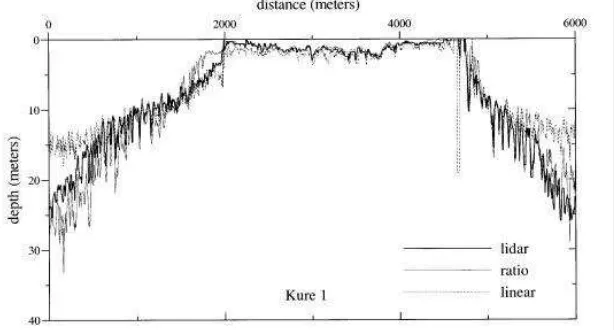
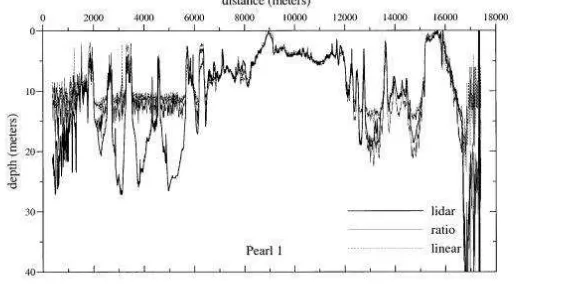
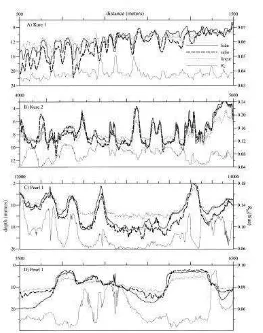
Algoritma diperiksa sepanjang tiga baris LIDAR, yang pertama yang merupakan 11-km transek memperluas di Kure (5 Kure 2) dari barat daya, daerah forereef melalui laguna pusat puncak timur laut karang, dan forereef yang (Gambar 3). Cekungan sentral sedikit keruh dengan baik sedimen tersuspensi, namun kepadatan kekeruhan ini tidak cukup untuk mengubah kecerahan band merah, dan visibilitas itu biasanya lebih dari 10 m, bahkan di lebih keruh daerah. Kedua Kure LIDAR transek (5 Kure 1) dari 6 km ex-cenderung di bagian utara dari atol dari barat ke timur, yang meliputi hanya forereef dan daerah dangkal di sepanjang backreef (Gambar 4). Transek ketiga diperiksa di sini adalah garis 17-km berjalan selatan ke utara melintasi Pearl (5Pearl 1) suatu melintasi banyak curam, struktur karang reticulated (Gambar 5). Itu koefisien disetel ke Kure 2 transek yang diterapkan di- rectly ke citra IKONOS dari Pearl, tanpa retuning untuk baik rasio atau algoritma linear.
Fig. 4. Profile across forereef (on either side), reef crest, and back reef at Kure Atoll (Kure 1 in text). Depth discrepancies be-tween 1,800 and 2,000 m occur in light cloud shadow.
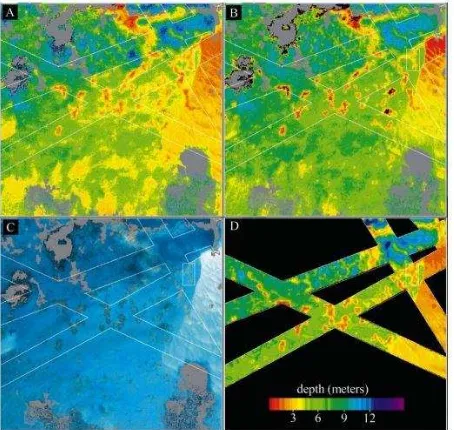
dalam struktur dua atol, dengan Kure memiliki atol laguna klasik dan Pearl memiliki struktur terumbu karang yang luas dan rumit dalam laguna (Gambar 5). Kebanyakan fitur vertikal utama direproduksi (Gambar 6), khususnya di perairan dangkal, termasuk cekungan dangkal dengan gelombang pasir, memacu-dan-alur pada forereef (Gambar 6A), terumbu Patch (Gambar 6B), dan curam, karang reticulated sempit struktur (Gambar 6C, D). Detail tata ruang juga baik wakil -disajikan, seperti dapat dilihat pada Gambar. 7, yang menunjukkan wilayah Kure dengan tambalan karang lebih dalam air dan pasir gelombang di air dangkal. Sepanjang dua transek Kure, kedalaman Januari-diciptakan dengan kedua metode sesuai dengan data LIDAR dalam air kurang dari; kedalaman 15 m. Hasil dari Pearl menggambarkan umum pengalihan algoritma (Gambar 5), karena kedua metode memberikan hasil yang berarti (to, 15 m) tanpa retuning. Kedua algoritma juga cukup efektif memulihkan kedalaman curam var-iability lebih kompleks mini-atol dan terumbu reticulated dari Pearl, termasuk peningkatan kedalaman kecil karakteristik pusat biasanya berpasir mini-atol. Namun, dalam relative air tinggi kekeruhan di cekungan di sebelah tenggara dari Laguna (misalnya, 5.500 m di 6D Gambar.), metode ini pasif gagal, karena dasar yang benar tidak dapat dideteksi in >15 m dari air, dan kedua algoritma menghasilkan bottom palsu. Ini gagal-ure menggambarkan keterbatasan mendasar dari estimasi kedalaman dari sistem optik, terlepas dari metode.
Fig. 5. Profile from Pearl and Hermes Atoll (Pearl 1 in text), crossing patch reefs, mini-atolls, and reef-crest (at 16,000 m).
Efektivitas kedua algoritma dalam menyelesaikan bathy-metric variasi independen dari variasi dalam bawah al- bedo ditunjukkan di beberapa daerah. Struktur dangkal dengan ganggang dan trotoar erat diselesaikan (Gambar 6B), dan terumbu Patch dan mini-atol diselesaikan bahkan dengan dramatis variasi reflektansi (Gambar 6C, D) antara gelap, shal-rendah terumbu dan cahaya, biasanya sandy- bottom, cekungan dalam (Gambar 7). Penutup Reef bervariasi dari ganggang yang tertutup trotoar untuk densePoritescolonies, memperkenalkan dua sampai empat kali lipat Varia-tion di Rw (biru), namun, algoritma menyelesaikan kedalaman variabel-negosiasi tanpa kesulitan. Fitur dangkal dapat memiliki kuat variasi kecerahan (terlihat di 12.300 dan 13.600 m pada Gambar. 6C). Contoh paling mencolok adalah mini-atol di Pearl di 13.600 m pada Gambar. 6C, di mana ujung-ujungnya cerah dan pusat, yang memiliki dasar hidup, gelap. Dalam air yang lebih dalam (Gambar 6A), besarnya variasi kedalaman di sempit jenis memacu-dan -groove struktur terumbu teratasi, meskipun mungkin ada beberapa konstan offset dari kedalaman benar val -nilai. Alur pasir adalah target lebih terang daripada taji karang berdekatan tapi masih diselesaikan sebagai lebih dalam ciri-ciri mereka sebenarnya.
Fig. 7. Depths from the three methods and ‘‘true-color’’ water reflectance for central Kure: (A) ratio, (B) linear, (C) true-color, and (D) lidar. The lidar swaths are 200 m wide and marked on each image. Depths are shown in meters with scale bar at lower right. The box (at upper right in each image) marks a patch reef of low reflectance. IKONOS imagery courtesy of Space Imaging.
Fig. 9. Comparison of all depths along Kure 2 (those from Fig. 3). The severe discrepancy in depth in the linear algorithm from 25–30 m (derived depths,10 m) occurred under a cloud shadow (see Fig. 3).
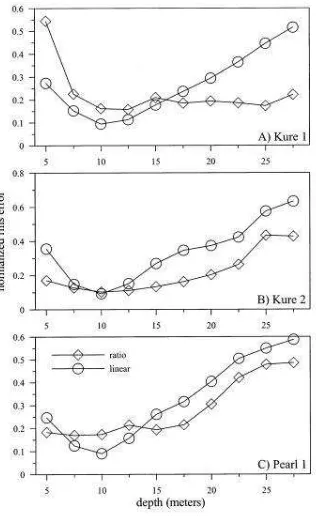
Fig. 11. Normalized root mean square (rms) error (ratio of rms error to actual depth) in 2.5-m bins for (A) Kure 1, (B) Kure 2, and (C) Pearl. The bin at 2.5 m depth was dropped because the nor-malization was problematic for both algorithms with water
≤0.6 m.
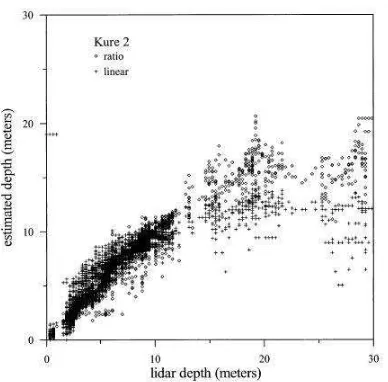
untuk hampir 30 m dengan algoritma rasio, sedangkan transformasi linear gagal pada 12-15 m.
Meneliti kesalahan normalisasi terhadap kedalaman menunjukkan perbedaan efektivitas dua metode dengan kedalaman dan antara transek yang berbeda. Rasio transformasi memiliki error rms konsisten normalisasi, 0,3 (30 %) di, 25 m dari air (Gbr. 11). Mengubah linear, seperti yang diharapkan, melakukan baik sampai 10-15 m, tetapi gagal pada titik yang dimanifestasikan dalam meningkatkan kesalahan rms.
Hal ini mengejutkan bahwa rasio mengubah dilakukan serta linear transformasi bersama Kure 2 di perairan, kedalaman 15 m karena transformasi linear disetel ke data sangat lidar yang digunakan untuk kesalahan evaluasi, sedangkan mengubah rasio itu disetel untuk hanya beberapa, independen bahari grafik soundings. Untuk menyelidiki stabilitas metode tuning, mengubah linear itu disetel untuk Lidar untuk Kure 1 transek. Tala ini diproduksi miskin hasil, dengan normalisasi rms kesalahan.0.5 bila diterapkan Kure 2.
Diskusi
Metode rasio transformasi membahas beberapa isu yang memiliki relevansi yang cukup untuk menggunakan citra multispektral pasif untuk memetakan batimetri perairan dangkal. Pertama, tidak membutuhkan pengurangan air yang gelap, yang memperluas jumlah habitat bentik di mana dapat diterapkan. Kedua, rasio mengubah metode memiliki koefisien empiris sedikit re-quired untuk solusi, yang membuat metode mudah untuk digunakan dan lebih stabil di daerah geografis yang lebih luas. ketiga, metode rasio dapat disetel menggunakan tersedia (dapat diandalkan) soundings. Dan akhirnya, hasil yang ditampilkan di sini menunjukkan bahwa metode rasio memiliki kedalaman penetrasi lebih unggul dari Metode linear untuk wilayah Samudera Pasifik dengan relatif jelas air. Rasio transformasi memiliki keterbatasan relatif terhadap linier mengubah, terutama dalam peningkatan tingkat kebisingan.
Penggunaan pertama citra IKONOS (Pulau Baker di Pasifik tengah) menunjukkan daerah perairan dangkal memiliki reflektansi lebih rendah dari perairan yang dalam, sehingga rasio linear tidak bisa diimplementasikan. Meskipun
Kure dan Pearl tidak memiliki daerah perairan dangkal kurang reflektif dari peraira dalam (biasanya disebabkan oleh pertumbuhan ganggang yang padat atau ditutupi lamun), kami telah menemukan koloni ganggang/alga dari ≥ 1 km2 di sebelah
utara-barat pulau Hawaii yang memiliki reflektansi gelap dari air dalam. Solusi untuk linear transformasi untuk memecahkan masalah low-albedo telah diusulkan (Van Hengel dan Spitzer 1991) tetapi membutuhkan tuning patch juga, yang hanya meningkatkan jumlah koefisien yang diperlukan. Metode linier standard membutuhkan lima koefisien yang bervariasi dengan kondisi lingkungan: R∞(ƛi),
R∞(ƛj), a0, ai, dan aj. Dimana-sebagai metode rasio hanya membutuhkan dua: m0 and
m1. Akibatnya, solusi rasio sederhana untuk mengeksekusi, karena tuning dapat
menjadi dicapai dengan beberapa soundings akurat. Hal ini tidak masalah sepele ketika bekerja di daerah di mana beberapa soundings tersedia.
Penentuan of R∞ mungkin memperkenalkan lebih ketidakpastian dalam algoritma linear daripada koefisien lainnya. Dengan setiap variasi dalam hamburan, R∞ akan berubah di kedua band, dan dengan variasi dalam penyerapan, R∞ akan berubah dalam biru Band. Hal ini sangat sulit untuk menentukan secara lokal dan sangat mudah bervariasi di seluruh tempat. Kegagalan untuk benar menghalangi-Miner∞ akan mempengaruhi penentuan kedalaman air yang lebih dalam. Metode optimasi baru yang telah diusulkan untuk instrumentasi hy-perspectral mungkin dapat mengatasi ini dengan pemecahan untuk R∞(Lee et al. 1999). Metode tersebut dapat berguna untuk proyek-proyek pemetaan geografis skala besar jika selalu tersedia dengan proses standar. Rasio transformasi hanya membutuhkan beberapa band dengan penyerapan cahaya pada perairan yang berbeda dan dapat diterapkan untuk setiap sensor mendeteksi panjang gelombang yang tepat.
Selain menerapkan metode rasio transformasi lebih maksimal pada Atolls Samudera Pasifik, kami berencana untuk menyelidiki cara-cara improvisasi algoritma saat ini, khususnya metode untuk mengatasi kekeruhan. Algoritma linear memiliki solusi yang melekat untuk albedo, juga harus dihitung untuk algoritma rasio. Penyetelan sederhana, hasil yang stabil, dan penetrasi kedalaman superior untuk penerapan rasio algoritma dalam memetakan kedalaman perairan pada area terumbu karang yang luas sama halnya dengan yang ditemukan dalam penelitian karang ini.
Referensi
CHAVEZ, P. S. 1996. Image-based atmospheric corrections—revis-ited and improved. Photogramm. Eng. Remote Sens.62:1025–1035.
GORDON, H. R., D. K. CLARK,J.W.BROWN,O.B.BROWN,R.H.EVANS, ANDW. W. BROENKOW. 1983. Phytoplankton pigment concentrations in the Middle Atlantic Bight: Comparison of ship determinations and CZCS estimates. Appl. Opt.22:20–36.
LEE, Z., K. L. CARDER,C.D.MOBLEY,R.G.STEWARD, ANDJ. S. PATCH. 1999. Hyperspectral remote sensing for shallow waters:2. Deriving bottom depths and water properties by optimiza-tion. Appl. Opt. 38:3831–3843. LUBIN, D., W. LI,P.DUSTAN,C.MAXEL, ANDK. STAMNES. 2001. Spectral
signatures of coral reefs: Features from space. Remote Sens. Environ.75:127– 137.
LYZENGA, D. R. 1978. Passive remote sensing techniques for map-ping water depth and bottom features. Appl. Opt.17:379–383.
______. 1981. Remote sensing of bottom reflectance and water at-tenuation parameters in shallow water using aircraft and Land-sat data. Int. J. Remote Sens.1:71–82.
______. 1985. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens.6:115–125.
MARITORENA, S., A. MOREL, ANDB. GENTILI. 1994. Diffuse reflec-tance of oceanic shallow waters: Influence of water depth and bottom albedo. Limnol. Oceanogr.39:1689–1703.
MUMBY, P. J., C. D. CLARK,E.P.GREEN, ANDA. J. EDWARDS. 1998. Benefits of water column correction and contextual ed-iting for mapping coral reefs. Int. J. Remote Sens. 19:203–210.
PHILPOT, W. D. 1989. Bathymetric mapping with passive multi-spectral imagery. Appl. Opt.28:1569–1578.
STUMPF,R.P.,ANDJ. R. PENNOCK. 1989. Calibration of a general optical equation for remote sensing of suspended sediments in a moderately turbid estuary, J. Geophys. Res. Oceans 94: 14,363–14,371. VANHENGEL,W.,ANDD. SPITZER. 1991. Multi-temporal water depth mapping by means of Landsat TM. Int. J. Remote Sens. 12:703–712. ZHANG, M., K. CARDER,F.E.MULLER-KARGER,Z.LEE, ANDD. B.
GOLDGOF. 1999. Noise reduction and atmospheric correction for coastal applications of landsat thematic mapper imagery. Remote Sens. Environ.70:167–180.