TUGAS AKHIR
ROBOT PEMADAM API BERODA
DENGAN SENSOR UVTRON SEBAGAI PENDETEKSI API DAN
ULTRASONIC SEBAGAI PENDETEKSI DINDING
Diajukan Guna Melengkapi Salah Satu Persyaratan Untuk Memperoleh Gelar Sarjana ( S1 )
Program Study Teknik Elektronika
Disusun Oleh : Indra Regisa ( 01403 – 013 )
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA
JAKARTA
PROGRAM STUDY TEKNIK ELEKTRO FAKULTAS TEKNOLOGI INDUSTRI UNIVERSITAS MERCU BUANA
LEMBAR PENGESAHAN TUGAS AKHIR
Nama : Indra Regisa NIM : 01403 – 013
Fak/Jurusan : FTI/Teknik Elektro Peminatan : Elektronika
Telah menyelesaikan Tugas Akhir dengan judul : “ROBOT PEMADAM API BERODA DENGAN SENSOR UVTRON SEBAGAI PENDETEKSI API DAN ULTRASONIC SEBAGAI PENDETEKSI DINDING”
Menyetujui dan Mensahkan,
Koordinator Tugas Akhir Pembimbing Tugas Akhir
( Ir. Yudhi Gunardi, MT ) ( Dr. Ir. Andi Andriansyah, M.Eng) Mengetahui,
Ka. Program Study T. Elektro Fakultas Teknologi Industri
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas berkat dan rahmat-Nya, sehingga penyusunan Tugas Akhir berjudul “Robot Pemadam Api dengan Sensor UVTron Sebagai Pendeteksi Api dan Ultrasonic Sebagai Pendeteksi Dinding” ini dapat terselesaikan dengan baik sebagai salah satu syarat dalam mencapai gelar Sarjana Teknik (S-1), Universitas Mercu Buana.
Mengingat masih terbatasnya kemampuan dan pengetahuan penulis, maka penulis menyadari sekali bahwa dalam penyusunan Tugas Akhir ini masih banyak kekurangan-kekurangan didalamnya. Penulis juga mengharapkan adanya suatu saran dan kritik yang bersifat membangun dari para pembaca untuk dapat dijadikan masukan dimasa yang akan datang.
Dalam penyusunan Tugas Akhir ini, penulis banyak mendapatkan bantuan dari berbagai pihak, baik dalam pembuatan alat, penyajian isi, maupun teknis penulisannya. Oleh karena itu pada kesempatan ini penulis ingin menyampaikan rasa terima kasih yang sebesar-besarnya kepada :
1. Bapak Ir. Budi Yanto H, MSc, selaku Ketua Program Studi Teknik Elektro, Universitas Mercu Buana.
2. Bapak Ir. Yudhi Gunardi, MT, selaku koordinator Tugas Akhir Teknik Elektro, Universitas Mercu Buana
3. Bapak Dr. Ir. Andi Andriansyah, M.Eng, selaku Pembimbing Tugas Akhir yang telah bersedia meluangkan waktu, tenaga, dan pikirannya dalam
memberikan bimbingan, pengarahan, dan dorongan semangat kepada penulis.
4. Bapak DR-Ing. Mudrik Alaydrus, selaku Pembimbing Akademik angkatan 2003 yang telah memberikan bimbingan, pengarahan, dan dorongan semangat selama kuliah kepada penulis.
5. Seluruh Staff pengajar Jurusan Teknik Elektro, Unversitas Mercu Buana yang telah mendidik dan membimbing penulis selama duduk di bangku perkuliahan.
6. Yang tercinta kedua Orangtua penulis ( Priyanto Utoro dan Yani ) yang telah membiayai penulis selama kuliah hingga lulus kuliah, memberikan dorongan dan semangat serta Do’a sehingga Tugas Akhir ini selesai dengan secepatnya.
7. Seluruh teman- teman Jurusan Teknik Elektro khususnya angkatan 2003 ( Handoko ST, Adista S.N ST, Bagus S, dan semuanya yang tidak bisa disebutkan satu per satu ) yang memberikan support dan semangat serta Do’a sehingga Tugas Akhir terselesaikan dengan baik.
Akhir kata, tidak lupa Penulis mendoakan semoga Allah SWT membalas segala kebaikan dan pertolongan yang telah diberikan oleh Bapak dan Ibu beserta teman-teman semua yang telah membantu penulis dalam penyusunan Tugas Akhir ini, dan semoga Tugas Akhir ini dapat berguna bagi semua pihak yang membutuhkannya. Terima Kasih.
Jakarta, Agustus 2008 Penulis
ABSTRAK
Saat ini perkembangan teknologi di negara kita ini berkembang dengan pesat. Hal ini dapat dibuktikan dengan banyaknya perusahaan khususnya di bidang industri yang proses produksinya hampir semuanya dikerjakan oleh mesin atau robot. Robot tidak hanya berguna di bidang industri saja, di dunia kedokteran pun robot sering digunakan untuk operasi pembedahan. Di sisi lain, robot juga digunakan untuk menjangkau dan mengambil informasi di daerah yang tidak dapat dijangkau oleh manusia.
Tugas akhir ini membuat robot yang dapat mencari keberadaan cahaya api lilin yang diletakkan di suatu ruangan dan kemudian memadamkannya. Robot pemadam api ini terdiri dari beberapa rangkaian sensor, rangkaian driver motor DC, dan rangkaian mokrokontroller. Sensor yang dipergunakan pada badan robot pemadam api adalah sensor pendeteksi intensitas cahaya api, pendeteksi dinding dan pendeteksi garis. Sensor pendeteksi intensitas cahaya api menggunakan sensor UVTron, sensor pendeteksi dinding menggunakan sensor ultrasonic dan sensor pendeteksi garis menggunakan sensor IR LED.
Telah dilakukan pengujian terhadap rangkaian sensor, rangkaian driver motor DC dan rangkaian mikrokontroller. Hasil pengujian menunjukkan bahwa rangkaian sensor, rangkaian driver motor DC, dan rangkaian mikrokontroller dapat berjalan dengan baik. Secara keseluruhan robot dapat berfungsi sesuai dengan perancangan dan pembuatan robot.
DAFTAR ISI
HALAMAN JUDUL ... i
LEMBAR PENGESAHAN ... ii
KATA PENGANTAR ... iii
ABSTRAK ... v
DAFTAR ISI ... vi
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Maksud dan Tujuan ... 2
1.3 Pembatasan Masalah ... 2
1.4 Metode Penelitian ... 2
1.5 Sistematika Penulisan ... 2
BAB II TEORI DASAR ... 4
2.1 Mekatronika ... 4
2.2 Komponen Elektronika ... 4
2.2.1 Resistor ... 5
2.2.2 IR LED (Infra Red Light Emitting Diode) ... 7
2.2.3 Photodioda ... 8
2.2.4 Motor DC ... 10
2.2.6 LM 324 ... 13
2.2.7 L 293D ... 18
2.3 Mikrokontroler ATMEL AT89C51 ... 20
2.4 Bahasa Asembly ... 21
BAB III PEMBUATAN ROBOT PEMADAM API ... 28
3.1 Blok Diagram Robot Pemadam Api ... 28
3.2 Rangkaian Elektronika ... 29
3.2.1 Rangkaian Sensor ... 29
3.2.2 Rangkaian driver Motor DC ... 35
3.2.3 Rangkaian Dasar Mikrokontroller ... 36
3.3 Bagian-bagian Robot Pemadam Api ... 37
3.3.1 Badan Robot ... 37
3.3.2 Roda ... 38
3.3.3 Kipas ... 39
3.3.4 Motor DC ... 40
3.4 Perakitan Robot Pemadam Api ... 41
3.5 Langkah-Langkah Pembuatan Program ... 42
3.6 Alur Kerja Robot ... 43
BAB IV PENGUJIAN DAN ANALISA ... 45
4.1 Pengujian Tiap Rangkaian ... 45
4.1.1 Pengujian Rangkaian Sensor UVTron ... 45
4.1.2 Pengujian Rangkaian Sensor Ultrasonic ... 46
4.1.3 Pengujian Rangkaian Sensor IR LED ... 48
4.2 Pengujian Robot Pemadam Api Keseluruhan ... 51 BAB V PENUTUP ... 54 5.1 Kesimpulan ... 54 5.2 Saran ... 54 DAFTAR PUSTAKA ... 55 LAMPIRAN ... 57
DAFTAR TABEL
2.1 Daftar kode warna pada resistor ... 6 4.1 Hasil Uji Sensor Ultrasonic ... 47 4.2 Hasil Gerak Motor DC setelah diberikan Tegangan 5 V ... 50
DAFTAR GAMBAR
2.1 Bentuk dan simbol resistor ... 5
2.2 Bentuk dan Simbol IR LED ... 8
2.3 Susunan Lapisan ... 9
2.4 Bentuk dan Simbol Photodioda ... 9
2.5 Rangkaian IR LED dan Photodioda ... 10
2.6 Jarak antara Tx dan Rx ( IR LED dan Photodioda) ... 10
2.7 Cara kerja Motor DC ... 11
2.8 Bentuk Motor DC dan Pemasangan Terminal Positif dan Negatif ... 11
2.9 Bentuk dan rangkaian Encoder ... 13
2.10 Bentuk dan Simbol LM 324 ... 13
2.11 Penguat Inverting ... 14
2.12 Penguat Non Inverting ... 15
2.13 Skematik dan Karakteristik OpAmp Sebagai Komparator ... 18
2.14 Bentuk dan Simbol L293D ... 18
2.15 Skematik pengendalian dua buah motor DC ... 19
2.16 Bentuk dan skematik mikrokontroler AT89C51 ... 20
2.17 Gambar Blok Diagram AT89C51 ... 21
3.1 Blok Diagram Robot Pemadam Api ... 28
3.3 Rangkaian sensor UVTron ... 30
3.4 Prinsip Echo Sounder ... 32
3.5 Rangkaian Antaramuka Ultrasonic ... 32
3.6 Skema Rangkaian dan Gambar IR LED ... 33
3.7 Bentuk dan rangkaian Encoder ... 35
3.8 Skematis Rangkaian Driver Motor DC... 35
3.9 Rangkaian dasar mikrokontroller AT89C51 ... 36
3.10 Sistem pendeteksi cahaya lilin ... 37
3.11 Badan robot secara keseluruhan ... 38
3.12 Gerakan Robot Peniup Lilin ... 38
3.13 Kipas Peniup api lilin ... 39
3.14 Motor DC ... 40
3.15 Hubungan antara arah putaran motor DC dengan arah pemberian arus ... 40
3.16 Rakitan motor DC dan roda penggerak ... 41
3.17 Rakitan Sistem Pendeteksi Lilin ... 41
3.18 Rakitan Sistem Pendeteksi Dinding ... 42
3.20 Alur Kerja Robot ... 43
4.1 Bentuk dan Gelombang Output Sensor UVTron ... 46
4.2 Blok diagram pengujian sensor ultrasonic ... 47
4.3 Pengujian Sensor IR LED ... 48
4.4 Posisi IR LED dan photodioda pada bidang ... 49
BAB I
PENDAHULUAN
1.1 Latar Belakang
Saat ini perkembangan teknologi di negara kita ini berkembang dengan pesat. Hal ini dapat dibuktikan dengan banyaknya perusahaan khususnya di bidang industri yang proses produksinya hampir semuanya dikerjakan oleh mesin atau robot. Robot tidak hanya berguna di bidang industri saja, di dunia kedokteran pun robot sering digunakan untuk operasi pembedahan.
Di sisi lain, robot juga digunakan untuk menjangkau dan mengambil informasi di daerah yang tidak dapat dijangkau oleh manusia. Contohnya robot yang dikirim ke Planet Mars dan mengambil informasi suhu, tekanan udara yang ada di planet tersebut. Oleh karena itu robot sangat berguna sekali bagi manusia.
Berdasarkan hal tersebut dibuatlah suatu robot yang berbentuk menyerupai kendaraan yang dapat mencari dimana posisi cahaya api lilin yang diletakkan pada suatu ruangan jika ruangan tersebut telah ditemukan, maka robot tersebut akan meniup lilin jika robot sudah berada cukup dekat dengan lilin yang telah dibatasi oleh garis hitam.
1.2 Tujuan
Tujuan tugas akhir ini adalah membuat robot yang dapat mencari keberadaan cahaya api lilin yang diletakkan di suatu ruangan dan kemudian memadamkannya.
1.3 Pembatasan Masalah
Masalah yang dibahas dalam tugas akhir ini meliputi pembuatan badan robot pemadam api, pembuatan perangkat keras sistem kontrol dan pembuatan perangkat lunak sistem kontrol robot pemadam api.
1.4 Metode Penelitian
1. Studi kepustakaan dari buku – buku penunjang dan internet yang terkait dalam pembuatan tugas akhir ini.
2. Eksperimen dan pengambilan data melalui pengujian dan pengukuran pada perancangan alat ini.
1.5 Sistematika Penulisan
Tugas Akhir ini disusun dengan sistematika penulisan sebagai berikut : BAB I PENDAHULUAN
Bab ini berisikan latar belakang masalah, maksud dan tujuan, metode penelitian, pembatasan masalah dan sistematika penulisan.
Bab ini berisikan definisi dan teori-teori yang mendukung proses pembuatan robot pemadam api, yaitu masalah mekatronika, komponen elektronika, mikrokontroler ATMEL AT89C51 dan bahasa assembly. BAB III PEMBUATAN ROBOT PEMADAM API
Bab ini berisikan tentang bagian-bagian robot pemadam api, pembuatan dan perakitan robot pemadam api.
BAB IV PENGUJIAN DAN ANALISA
Bab ini berisi tentang pengujian dan analisa robot pemadam api. BAB V KESIMPULAN DAN SARAN
Bab ini berisi tentang kesimpulan dan saran yang dapat diambil dari penulisan tugas akhir.
DAFTAR PUSTAKA LAMPIRAN
BAB II
TEORI DASAR
Pada bab ini dibahas tentang mekatronika, beberapa komponen elektronika, mikrokontroler ATMEL AT89C51, dan bahasa Assembly. Komponen elektronika yang dibahas meliputi: resistor, IR LED, phototransistor, motor DC, LM324 dan L293D.
2.1 Mekatronika
Mekatronika berasal dari kata mekanik, elektronika dan informatika. Mekatronika adalah teknologi atau rekayasa yang menggabungkan teknologi tentang mesin, elektronika dan informatika untuk merancang sistem. Mekatronika mengarah pada teknologi kendali numerik yaitu teknologi mengendalikan mekanisme menggunakan aktuator untuk mencapai tujuan tertentu dengan memonitor informasi kondisi gerak mesin menggunakan sensor dan memasukkan informasi tersebut ke dalam mikroprosesor.
2.2 Komponen elektronika
Komponen elektronika yang digunakan pada tugas akhir ini terdiri dari resistor, IR LED, photodioda, motor DC, LM324 dan L293D.
2.2.1 Resistor
Resistor merupakan komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang mengalir pada suatu rangkaian. Sesuai dengan namanya, resistor bersifat resistif dan umumnya terbuat dari bahan karbon. Satuan resistansi dari suatu resistor disebut Ohm atau dilambangkan dengan symbol Ω (Omega). Contoh penggunaan resistor adalah resistor yang dipasang secara seri dengan LED (light-emitting diode) untuk membatasi arus yang mengalir melalui LED. Bentuk dan simbol resistor dapat dilihat pada gambar 2.1.
Gambar 2.1
Bentuk dan simbol resistor
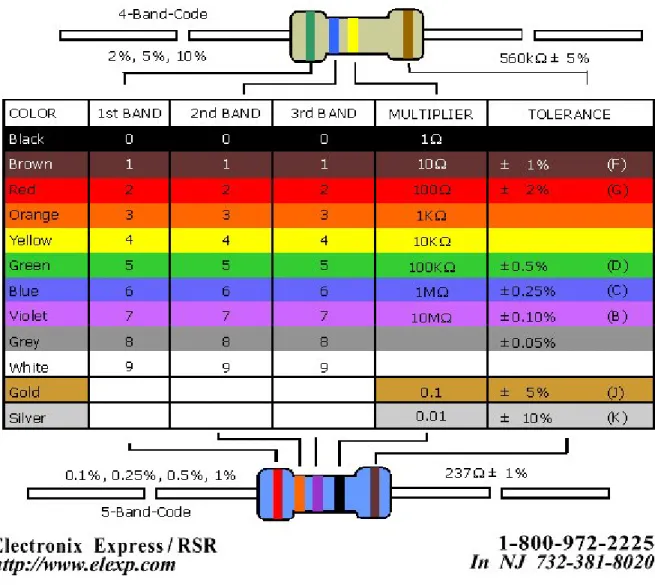
Tipe resistor yang umum berbentuk tabung dengan dua kaki tembaga di kiri dan kanan. Pada badan resistor terdapat lingkaran berbentuk gelang kode warna untuk memudahkan pengguna mengenali besar resistansi resistor tanpa mengukur besarnya dengan Ohmmeter. Kode warna tersebut merupakan standar manufaktur yang dikeluarkan oleh EIA (Electronic Industries Associations). Kode warna resistor dapat dilihat pada tabel 2.1.
Hubungan antara hambatan, tegangan, dan arus, dapat disimpulkan melalui hukum berikut ini, yang terkenal sebagai hukum Ohm:
V = IR ...(2 - 1)
dimana V adalah beda potensial antara kedua ujung benda penghambat, I adalah besar arus yang melalui benda penghambat, dan R adalah besarnya hambatan benda penghambat tersebut.
Tabel 2.1. Daftar kode warna pada resistor
Resistansi dibaca dari warna gelang yang paling depan ke arah gelang toleransi. Warna gelang toleransi biasanya berada pada badan resistor paling
pojok dengan jarak lebih lebar dibandingkan dengan jarak antar gelang yang lain. Warna gelang pertama berada pada badan resistor paling pojok dengan posisi sedikit ke dalam.
Jumlah gelang yang melingkar pada resistor umumnya sesuai dengan besar toleransinya. Resistor dengan toleransi 5 %, 10 % dan 20 % memiliki 3 gelang, tetapi resistor dengan toleransi 1 % dan 2% memiliki 4 gelang. Gelang pertama dan seterusnya menunjukkan besar nilai satuan dan gelang terakhir menunjukkan faktor pengalinya.
2.2.2 IR LED (Infra Red Light Emitting Diode)
IR LED (Infra Red Light Emitting Diode) merupakan salah satu jenis LED yang dapat memancarkan radiasi dalam daerah ultraviolet visible (sinar tampak) dan infra merah (sinar tak tampak) pada spektrum elektromagnetik. Radiasi cahaya yang dihasilkan IR LED ini sebanding dengan arus forward bias, maka cahaya yang dipancarkan berada pada infra merah. Cahaya yang dipancarkan oleh IR LED tidak dapat dilihat oleh mata sehingga diperlukan photodioda untuk mendeteksinya.
IR LED yang akan digunakan harus memiliki sebuah resistor yang disambungkan secara serial untuk membatasi arus yang mengalir. Bila arus yang mengalir melalui IR LED terlalu besar maka akan mengakibatkan IR LED terbakar. Bentuk dan simbol IR LED dapat dilihat pada gambar 2.2
Gambar 2.2
Bentuk dan simbol IR LED
IR LED memiliki dua kaki yaitu anoda dan katoda. Kaki anoda pada IR LED memiliki ukuran yang lebih panjang jika dibandingkan dengan kaki katoda. Kaki anoda dan katoda dapat dilihat pada gambar 2.2. IR LED akan berfungsi dengan baik jika kaki-kaki IR LED dipasang dengan benar. Kaki anoda dipasang pada bagian positif (+) dan kaki katoda dipasang pada bagian negative (-). Untuk mengetahui kaki-kaki anoda dan katoda bisa juga dilihat pada bagian elektoda. Elektroda untuk bagian katoda akan lebih besar dibandingkan dengan elektroda anoda.
2.2.3 Photodioda
Photodioda adalah komponen elektronik semikonduktor yang sangat sensitif terhadap cahaya. Fungsi dari photodioda adalah sebagai penerima (receiver) cahaya. Cahaya yang diterima photodioda dapat berasal dari sumber cahaya (transmitter) secara langsung ataupun berasal dari cahaya yang dipantulkan. Jenis cahaya yang bisa diterima photodioda bisa berupa cahaya tampak ataupun cahaya tidak tampak. Sumber cahaya bisa berasal dari lampu, matahari, api, atau dari IR LED.
Dioda photo adalah suatu dioda yang di rancang dengan tegangan muka terbalik (reverse bias). Dioda ini biasanya terbungkus oleh kaca. Gambar dibawah ini adalah bentuk lapisan symbol dan kontruksi dioda photo.
cahaya
P - + N
Gambar 2.3 Susunan Lapisan
Besarnya reverse tergantung dari temperature dan intensitas cahaya yang datang pada daerah pengosongan (depletion layer). Daerah pengosongan adalah daerah dimana terjadi perpindahan muatan diantara 2 lapisan semi konduktor P – N (lihat gambar 2.3). Berkas cahaya yang datang pada dioda tersebut akan ikut menentukan besarnya arus reverse, sehingga memungkinkan lepasnya ikatan – ikatan antara electron – electron valensi dengan intinya. Kejadian tersebut akan membentuk pasangan electron bebas dan hole yang baru. Oleh karena itu arus reverse akan bertambah pula, perubahan arus reverse ini sangat kecil yaitu hanya beberapa micro ampere (µA) saja. Tetapi hal ini cukup untuk dimanfaatkan di berbagai keperluan. Bentuk dan lambang photodioda dapat dilihat pada gambar 2.4.
Gambar 2.4
Gambar 2.5
Rangkaian IR LED dan Photodioda
Cara kerja photodioda adalah ketika mendapat cahaya dari IR LED maka photodioda akan saturasi, arus mengalir dari kolektor ke emitor dan dihubungkan ke rangkaian penguat OP AMP LM 324 sebagai komparator.
Gambar 2.6
Jarak antara Tx dan Rx ( IR LED dan Photodioda)
2.2.4 Motor DC
Motor adalah suatu mesin listrik yang mengubah energi listrik menjadi energi mekanik. Pada umumnya motor arus searah terdiri dari tiga bagian utama yaitu:
- Bagian yang diam disebut dengan stator - Bagian yang berputar disebut dengan rotor - Komutator dan sikat arang
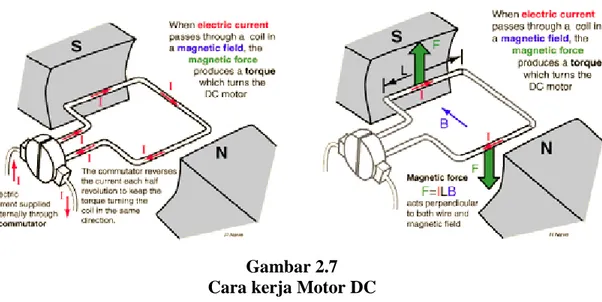
Stator merupakan magnet permanen yang melekat pada lingkaran paling luar. Sedangkan rotor yang berhimpit dengan stator. Komutator ikut berputar dengan rotor yang berfungsi sebagai pengatur polaritas tegangan yang masuk ke rotor agar motor tetap berputar. Prinsip kerja motor DC dapat dilihat pada gambar 2.7
Gambar 2.7 Cara kerja Motor DC
Motor DC pada umumnya berputar searah jarum jam, tetapi dapat juga berputar berlawanan arah jarum jam. Pemasangan yang tidak sesuai antara terminal positif dan negatif dapat menyebabkan motor berputar berlawanan. Pemasangan terminal positif dan negatif dapat dilihat pada gambar 2.8.
Gambar 2.8
Motor DC yang digunakan pada mainan anak-anak umumnya mempunyai tegangan 5V, 12V, 24V dan 48V. Sedangkan motor DC yang digunakan untuk aplikasi industri umumnya mempunyai tegangan 90V, 180V dan 250V.
Secara garis besar prinsip kerja motor dc adalah melewatkan arus listrik melalui kumparan yang diletakkan pada medan magnet. Kejadian ini akan menimbulkan gaya Lorenz pada kumparan. Gaya tersebut menghasilkan torsi yang digunakan untuk memutar rotor motor dc. Arah putaran motor dc, tergantung pada arah listrik yang dilewatkan pada kumparan. Bila arah arus listrik dibalik, maka arah putaran rotor juga akan berbalik. Besarnya torsi yang dihasilkan motor dc tergantung pada besarnya arus yang dilewatkan pada kumparan. Semakin besar arus mengalir akan mengakibatkan semakin besar gaya F yang dihasilkan.
2.2.5 Encoder
Agar putaran kedua roda sama digunakan encoder untuk mengetahui jumlah putaran motor. Dengan mengetahui jumlah putaran motor, maka dapat diketahui roda mana yang berputar lebih cepat, sehingga roda yang berputar lebih cepat itu dapat kita perlambat melalui mikrokontroler.
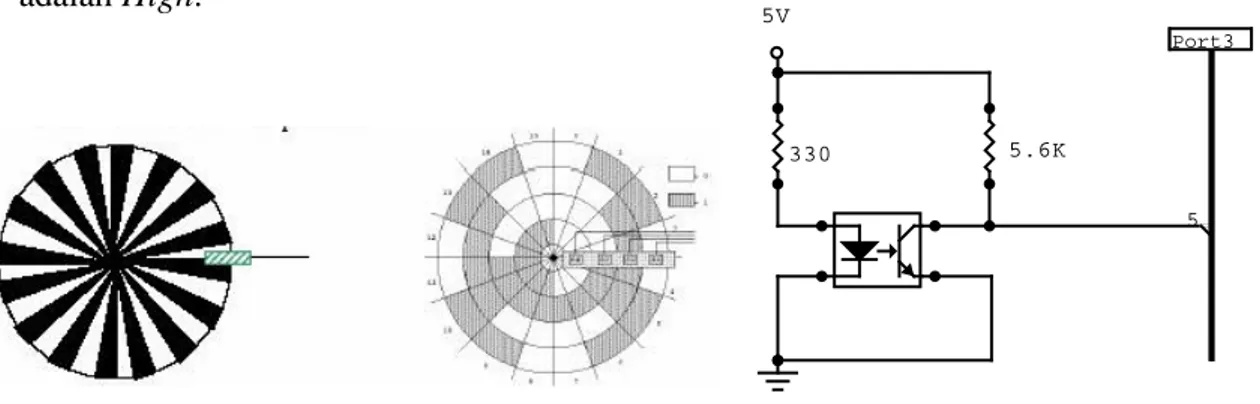
Encoder ini dibuat dengan cara menyambung potongan plat lingkaran pada as motor. Pada pinggir lingkaran dilubangi dengan jarak yang sama sebanyak duapuluh lubang. Lubang tersebut akan dideteksi oleh photointerrupter dimana bila plat berlubang, maka output dari photointerrupter adalah Low, sedangkan pada saat photointerrupter terhalang oleh plat, maka output dari photointerrupter adalah High.
5 Port3 5.6K 330 5V Gambar 2.9
Bentuk dan rangkaian Encoder
2.2.5 LM324
LM324 adalah IC Operational Amplifier (OpAmp) yang berfungsi sebagai penguat tegangan atau komparator (pembanding). LM324 mempunyai 14 kaki dengan fungsi yang berbeda-beda. Bentuk dan simbol LM324 dapat dilihat pada gambar 2.10
Gambar 2.10
Bentuk dan Simbol LM324
Terdapat beberapa rangkaian yang dapat dihasilkan dari LM324, yaitu inverting amplifier, non-inverting amplifier dan komparator.
a. Inverting amplifier
Rangkaian dasar penguat inverting adalah seperti yang ditunjukkan pada gambar 2.11, dimana sinyal masukannya dibuat melalui input inverting. Seperti tersirat pada namanya, pembaca tentu sudah menduga bahwa fase keluaran dari penguat inverting ini akan selalu berbalikan dengan inputnya. Pada rangkaian ini, umpanbalik negatif di bangun melalui resistor R2.
Gambar 2.11 Penguat Inverting
Input non-inverting pada rangkaian ini dihubungkan ke ground, atau v+ =
0. Dengan mengingat dan menimbang aturan op-amp ideal, maka akan dipenuhi v
-= v+ = 0. Karena nilainya = 0 namun tidak terhubung langsung ke ground, input
op-amp v- pada rangkaian ini dinamakan virtual ground. Dengan fakta ini, dapat
dihitung tegangan jepit pada R1 adalah vin – v- = vin dan tegangan jepit pada
reistor R2 adalah vout – v- = vout. Kemudian dengan menggunakan aturan 2, di
ketahui bahwa :
iin + iout = i- = 0, karena menurut aturan 2, arus masukan op-amp adalah 0.
iin + iout = vin/R1 + vout/R2 = 0
Selanjutnya
vout/R2 = - vin/R1 .... atau
Jika penguatan G didefenisikan sebagai perbandingan tegangan keluaran terhadap tegangan masukan, maka dapat ditulis
G = V
Out/V
in =- R2 /R1...(2 – 2)
Impedansi rangkaian inverting didefenisikan sebagai impedansi input dari sinyal masukan terhadap ground. Karena input inverting (-) pada rangkaian ini diketahui adalah 0 (virtual ground) maka impendasi rangkaian ini tentu saja adalah Zin = R1.b. Non-Inverting amplifier
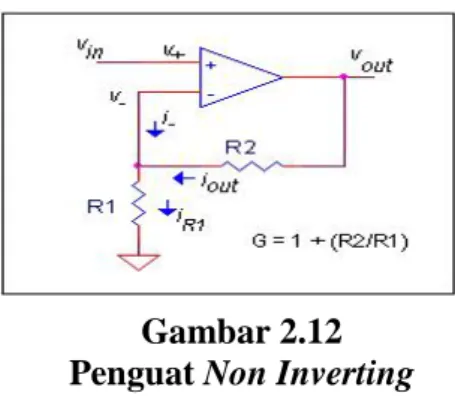
Prinsip utama rangkaian penguat non-inverting adalah seperti yang diperlihatkan pada gambar 2.12 berikut ini. Seperti namanya, penguat ini memiliki masukan yang dibuat melalui input non-inverting. Dengan demikian tegangan keluaran rangkaian ini akan satu fasa dengan tegangan inputnya. Untuk menganalisa rangkaian penguat op-amp non-inverting, caranya sama seperti menganalisa rangkaian inverting.
Gambar 2.12 Penguat Non Inverting
Dengan menggunakan aturan 1 dan aturan 2, kita uraikan dulu beberapa fakta yang ada, antara lain :
vin = v+
v+ = v- = vin ... lihat aturan 1.
Dari sini ketahui tegangan jepit pada R2 adalah vout – v- = vout – vin, atau iout =
(vout-vin)/R2. Lalu tegangan jepit pada R1 adalah v- = vin, yang berarti arus iR1 =
vin/R1.
Hukum kirchkof pada titik input inverting merupakan fakta yang mengatakan bahwa :
iout + i(-) = iR1
Aturan 2 mengatakan bahwa i(-) = 0 dan jika disubsitusi ke rumus yang
sebelumnya, maka diperoleh
iout = iR1 dan Jika ditulis dengan tegangan jepit masing-masing maka diperoleh
(vout – vin)/R2 = vin/R1 yang kemudian dapat disederhanakan menjadi :
vout = vin (1 + R2/R1)
Jika penguatan G adalah perbandingan tegangan keluaran terhadap tegangan masukan, maka didapat penguatan op-amp non-inverting :
G = V
out/V
in= (1 + R
2/R
1)...(2 – 3)
LM324 mempunyai dua kaki input yaitu inverting input (bersimbol negatif) dan non-inverting input (bersimbol positif). Sebagai pembanding LM324 berfungsi membandingkan tegangan yang masuk pada kedua kaki input. Untuk membandingkan kedua kaki input ini maka salah satu kaki input diberi tegangan referensi dan kaki input yang lain diberi tegangan pembanding.
b. Op-Amp sebagai komparator
Komparator merupakan rangkaian elektronik yang akan membandingkan suatu input dengan referensi tertentu untuk menghasilkan output berupa dua nilai (high dan low). Suatu komparator mempunyai dua masukan yang terdiri dari tegangan acuan (Vreference) dan tegangan masukan (Vinput) serta satu tegangan ouput (Voutput).
Dalam operasinya, komparator akan mempunyai sebuah keluaran konstan yang bernilai Low saat Vinput lebih kecil dari Vreferensi dan High saat Vinput lebih besar dari Vreferensi. Nilai dari Low dan High tersebut akan ditentukan oleh desain dari komparator itu sendiri. Keadaan output ini disebut sebagai karakteristik output komparator. Gambar 2.13a menunjukkan sebuah komparator sederhana, terdapat Vreferensi yang merupakan hasil bagi tegangan dari tegangan sumber, sehingga Vreferensi akan bernilai separuh tegangan sumber. Sedangkan tegangan input divariasikan dari 0V hingga Vsumber. Gambar 2.13b menunjukkan diagram input-ouput terhadap waktu dari komparator. Saat Vinput < V referensi, output akan sama dengan Vsumber (+) dan saat Vinput > Vreferensi output akan sama dengan 0 V. Saat kedua kaki input dibalik maka output karakteristik dari komparator pun akan ikut membalik, seperti ditunjukan oleh gambar 2.13c.
Gambar 2.13
Skematik dan Karakteristik Op-Amp sebagai komparator
2.2.6 L293D
L293D merupakan IC yang dapat dipergunakan untuk mengontrol sebuah motor. Selain itu L293D mampu menjalankan beban induktif seperti relay, selenoid, motor DC maupun motor stepper. Bentuk dan simbol L293D dapat dilihat pada gambar 2.14.
Gambar 2.14
L293D mempunyai 16 kaki dengan fungsi yang berbeda-beda. Kaki-kaki output yang dihubungkan ke motor DC adalah kaki 3, 6, 11 dan 14. Kaki 3 dan kaki 6 dihubungkan ke sebuah motor DC, sedangkan kaki 11 dan kaki 14 dihubungkan ke sebuah motor DC yang lain. Arah putaran motor DC dapat diatur dengan cara memberikan kondisi berbeda pada kaki yang berpasangan. Satu buah L293D dapat mengontrol dua buah motor DC. Skematik pemakaian L293D yang digunakan untuk mengendalikan dua buah motor DC dapat dilihat pada gambar 2.15
Gambar 2.15
Skematik pengendalian dua buah motor DC
Secara umum L293D memiliki fitur sebagai berikut:
1. Keluaran arus dari kaki output dapat mencapai 600 mA tiap kanal, 2. Tersedia fasilitas enable (pengaktif),
2.3 Mikrokontroler ATMEL AT89C51
Mikrokontroler AT89C51 merupakan salah satu jenis mikrokontroler CMOS 8 bit dengan Flash memori 4 Kbyte yang tahan 1000 kali tulis/hapus. Pada mikrokontroler juga terdapat RAM Internal dengan kapasitas 128 x 8 bit dengan frekuensi pengoperasian 24 MHz. Bentuk dan skematik mikrokontroler AT89C51 dapat dilihat pada gambar 2.16.
Gambar 2.16
Bentuk dan skematik mikrokontroler AT89C51
Mikrokontroler AT89C51 memiliki 40 kaki. Kaki-kaki mikrokontroler terdiri dari sumber tegangan, kristal, kontrol dan input-output. Mikrokontroler ini memiliki empat parallel port yaitu P0, P1, P2 dan P3. Setiap port mempunyai 8 kaki input-output (I/O) yang berfungsi sebagai input dan output program kontroler. Mikrokontroler 89C51 adalah mikrokontroler dengan arsitektur MCS51 seperti 8031 dengan memori Flash PEROM (Programmable and Erasable Read Only Memory)
Gambar 2.17
Gambar Blok Diagram AT89C51
2.4 Bahasa Assembly
Bahasa pemrograman terdiri dari tiga bagian. Pertama bahasa tingkat tinggi, kedua bahasa tingkat menengah dan ketiga bahasa tingkat rendah. Bahasa tingkat tinggi yaitu bahasa pemrograman yang hampir menyerupai bahasa manusia. Bahasa tingkat menengah yaitu bahasa pemrograman yang merupakan
bahasa dasar dari bahasa pemrograman tingkat tinggi. Sedangkan bahasa tingkat rendah yaitu bahasa mesin yang tidak dimengerti oleh manusia. Bahasa assembly yang digunakan untuk menulis program pada mikrokontroler AT89C51 adalah bahasa turbo assembler V2.2.
Bahasa assembly yang digunakan pada tugas akhir ini terdiri dari org, equ, mov, acall, jnb, djnz, cjne, sjmp, setb, clr, ret dan end.
Ø Org
Perintah org digunakan untuk menentukan lokasi awal program. Penulisan org tidak boleh diikuti dengan penggunaan label.
Contoh penulisan Artinya
Org 0h
Awal program berada pada lokasi memori 0h
Ø Equ
Perintah equ digunakan untuk menggantikan suatu nilai bilangan dengan suatu nama simbol.
Contoh penulisan Artinya Satuan Equ
-50000
Simbol satuan diberi nilai -50000
Ø Mov
Perintah mov digunakan untuk memindahkan atau mentransfer data. Contoh penulisan Artinya
Mov P1,#11111111b
Data 11111111b dipindahkan ke port P1
Ø Acall
Perintah acall digunakan untuk memanggil sub-rutin. Lompatan yang dilakukan berada di area sebesar 2 Kbyte.
Contoh penulisan Artinya
Acall Tunda
Memanggil sub-rutin yang diawali dengan label Tunda
Ø Jnb (Jump if Not Bit)
Perintah jnb digunakan untuk melakukan aksi lompat kesuatu alamat yang didefinisikan apabila bit dari register atau memori yang dapat dialamati secara bit bernilai low. Apabila bit bernilai high maka program akan melakukan instruksi selanjutnya.
Contoh penulisan Artinya
Jnb P1.1,Mulai
Jika P1.1 bernilai low,
program lompat ke baris yang berlabel Mulai. Jika P1.1 bernilai high program akan menjalankan instruksi selanjutnya
Ø Djnz (Decrement and Jump if Not Zero)
Perintah djnz digunakan untuk melakukan pengurangan satu sampai dengan nol. Jika hasil pengurangan belum nol, maka program lompat ke label tertentu sampai dengan nol.
Contoh penulisan Artinya
Djnz R0,Lagi
Kurangi R0 dengan 1, jika hasil pengurangan tidak sama dengan nol maka program lompat ke baris yang dimulai dengan label Lagi. Program akan melakukan instruksi selanjutnya bila R0 sama dengan nol
Ø Cjne (Compare and Jump if Not Equal)
Perintah cjne digunakan untuk melakukan perbandingan antara data tujuan dan data sumber, serta melakukan lompatan ke alamat yang ditentukan apabila perbandingannya tidak sama.
Contoh penulisan Artinya
Cjne R3,#1,Lagi
Apabila R3 tidak sama dengan 1, Program akan lompat ke baris yang dimulai dengan label Lagi
Ø Sjmp (Short Jump)
Perintah sjmp digunakan untuk melakukan lompatan ke alamat yang ditentukan dengan lompatan maksimum sebesar 128 Byte.
Contoh penulisan Artinya
Sjmp Mulai
Lompat ke baris yang dimulai dengan label Mulai
Ø Setb (Set Bit)
Perintah setb digunakan untuk mengubah bit-bit pada RAM internal maupun register yang dapat dialamati secara bit menjadi 1.
Contoh penulisan Artinya
Setb A.7
Bit ke 7 dari akumulator A diubah menjadi 1
Ø Clr (Clear)
Perintah clr digunakan untuk mengubah bit-bit pada RAM internal maupun register yang dapat dialamati secara bit menjadi 0.
Contoh penulisan Artinya
Clr A.7
Bit ke 7 dari akumulator A diubah menjadi 0
Ø Ret
Perintah ret digunakan untuk mengakhiri sub-rutin dan kembali ke baris yang memanggil sub-rutin.
Contoh penulisan Artinya
Ret Kembali ke program utama
Ø End
Perintah end digunakan untuk mengakhiri program. Contoh penulisan Artinya
End Program berakhir
Program pada mikrokontroler AT89C52 ditulis dengan menggunakan program pengolahan kata. Program tersebut kemudian disimpan dengan ekstensi “asm” atau ekstensi lainnya dengan jumlah huruf tiga buah. Program dengan ekstensi “asm” atau lainnya kemudian dikompilasi dengan menggunakan program “asm51.exe”. Dari proses kompilasi ini akan dihasilkan dua buah file yaitu file
dengan ektensi “obj” dan ekstensi “lst”. File dengan ekstensi “lst” dipergunakan untuk memeriksa kesalahan sintaks program yang telah dibuat.
File dengan ekstensi “obj” kemudian diubah menjadi file dengan ekstensi hex dengan menggunakan program “oh.exe”. Program dengan exstensi “hex” kemudian ditulis ke mikrokontroler dengan menggunakan downloader.
BAB III
PEMBUATAN ROBOT PEMADAM API
3.1 Blok Diagram Robot Pemadam Api
Blok diagram robot pemadam api digambarkan pada gambar 3.1 dibawah ini.
Gambar 3.1
Blok Diagram Robot Pemadam Api
Secara umum, rangkaian di atas terdiri dari dua mikrokontroller. Mikrokontroller pertama dihubungkan ke rangkaian sensor ultrasonic yang berfungsi sebagai input agar dapat mengetahui keadaan disekitar sensor ultrasonic tersebut apakah terhalang atau tidak. Sedangkan mikrokontroller kedua
dihubungkan dengan rangkaian sensor dan rangkaian penggerak (driver) motor DC. Mikrokontroller AT89C51 akan mengambil input berupa sinyal digital dari rangkaian sensor dan memberikan output berupa sinyal digital ke rangkaian driver motor DC, encoder, servo dan kipas pemadam api. Sinyal digital input dari sensor bisa mempengaruhi mikrokontroller AT89C51 untuk memutarkan motor DC, servo dan kipas.
3.2 Rangkaian Elektronika
Rangkaian elektronika yang dipergunakan pada badan robot pemadam api terdiri dari rangkaian sensor, rangkaian driver motor DC dan rangkaian dasar mikrokontroller.
3.2.1 Rangkaian Sensor
Sensor yang dipergunakan pada badan robot pemadam api adalah sensor pendeteksi intensitas cahaya api, pendeteksi dinding dan pendeteksi garis. Sensor pendeteksi intensitas cahaya api menggunakan sensor UVTron, sensor pendeteksi dinding menggunakan sensor ultrasonic dan sensor pendeteksi garis menggunakan sensor IR LED.
a. Sensor UVTron
Hamamatsu UVTron R2868 adalah sebuah sensor yang mendeteksi adanya nyala api yang memancarkan sinar ultraviolet. Pancaran cahaya ultraviolet dari sebuah nyala lilin berjarak 5 (lima) meter dapat dideteksi oleh sensor ini.
Sensor ini juga dapat mendeteksi beberapa fenomena yang tak nampak seperti transmisi tegangan tinggi.
Agar sensor UVTron ini dapat terhubung pada sistem mikrokontroler maka diperlukan rangkaian pengkondisi sinyal yang berfungsi mengubah respon dari UVTron menjadi pulsa yang dapat dikenali oleh sistem mikrokontroler. Dengan Modul C3704 maka respon UVTron akan diproses menjadi pulsa-pulsa selebar 10 ms dan arus maksimum 100 mA. Keluaran modul ini menggunakan konfigurasi open collector.
(a) (b) Gambar 3.2
(a) UVTron R2868 (b) Grafik Respon
Gambar 3.3
Pada modul ini, power supply 5 Volt diubah menjadi 350 Volt DC melalui bagian High Voltage DC to DC Converter untuk mengaktifkan sensor UVTron. Sedangkan Signal Processing Circuit berfungsi untuk mengatur berapa jumlah pulsa yang masuk dari sensor UVTron selama 2 detik yang akan direspon oleh C3704 menjadi pulsa selebar 10 ms. Pada kondisi standar, digunakan pengaturan 3 pulsa dalam 2 detik. Namun untuk kondisi di mana banyak cahaya-cahaya luar lainnya, pengaturan dapat diubah menjadi 5, 7 atau 9 pulsa sehingga sensitivitas dari C3704 menjadi lebih rendah.
Keluaran dengan pulsa sebesar 10 ms ini selanjutnya dapat dihubungkan langsung pada sistem mikrokontroler di mana program pada sistem mikrokontroler tersebut akan mendeteksi adanya perubahan kondisi input dengan periode 10 ms sebagai indikasi adanya nyala api dalam area 5 meter.
b. Sensor Ultrasonic
Sistem pendeteksi dinding pada robot ini menggunakan sensor ultrasonic. Prinsip kerja echo sounder untuk pengukuran jarak digambarkan dalam Pulsa Ultrasonic. Pulsa Ultrasonic merupakan sinyal ultrasonic dengan frekwensi ± 41 KHz sebanyak 12 periode, dikirimkan dari pemancar Ultrasonic. Ketika pulsa mengenai benda penghalang, pulsa ini dipantulkan, dan diterima kembali oleh penerima Ultrasonic. Dengan mengukur selang waktu antara saat pulsa dikirim dan pulsa pantul diterima, jarak antara alat pengukur dan benda penghalang bisa dihitung.
Gambar 3.4 Prinsip Echo Sounder
Gambar 3.5
Rangkaian Antaramuka Ultrasonic
c. Sensor IR LED
Sistem pendeteksi garis ini terdiri dari sebuah transmitter (pengirim) dan receiver (penerima). Sensor yang digunakan sebagai transmitter adalah IR LED. IR LED merupakan salah satu jenis LED yang dapat memancarkan cahaya tak
tampak (infra merah) pada spektrum elektromagnetik. Sensor yang digunakan sebagai receiver adalah photodioda. Photodioda dapat memberikan reaksi perubahan tegangan bila menerima cahaya. Skematis rangkaian sensor dapat dilihat pada gambar 3.6 (a). Konfigurasi IR LED terhadap photodioda dapat dilihat pada gambar 3.6 (b).
(a) (b)
Gambar 3.6
(a) Skematis rangkaian sensor (b) Konfigurasi IR LED terhadap photodioda
Cara kerja rangkaian sensor apabila di depan IR LED ada suatu benda atau bidang yang berwarna terang, maka cahaya IR LED akan dipantulkan oleh benda atau bidang. Cahaya pantulan dari bidang diterima oleh photodioda. Cahaya yang diterima photodioda akan menghasilkan arus di kaki basis photodioda. Akibat adanya arus di kaki basis, maka kaki collector dan emitter akan terhubung.
Apabila di depan IR LED ada suatu benda atau bidang yang berwarna gelap, maka cahaya IR LED tidak dapat dipantulkan dengan baik oleh benda atau bidang. Akibat pemantulan cahaya yang kurang baik pada photodioda, maka photodioda tidak cukup kuat untuk membangkitkan arus di kaki basis. Akibat
tidak adanya arus di kaki basis, maka kaki collector dan emitter tidak akan terhubung.
Selain komponen IR LED dan photodioda terdapat pula komponen lain pada rangkaian sensor seperti resistor, variabel resistor, dan IC LM324. Resistor berfungsi untuk membatasi arus yang mengalir. Variabel resistor pada rangkaian ini berfungsi sebagai pembagi tegangan di kaki tiga Op Amp.
IC LM324 pada rangkaian sensor ini difungsikan sebagai pembanding tegangan antara kaki positif dan kaki negatif. Apabila tegangan di kaki positif lebih besar dari pada tegangan di kaki negatif, maka kaki output Op Amp akan bernilai high. Apabila tegangan di kaki positif lebih kecil dari pada tegangan di kaki negatif, maka kaki output Op Amp akan bernilai low.
Sensor ini berfungsi untuk mendeteksi lintasan berwarna hitam. Apabila sensor mendeteksi lintasan warna hitam, maka robot akan berhenti. Robot pemadam api dioperasikan pada bidang berwarna putih yang dibatasi oleh lintasan berwarna hitam.
d. Rangkaian Sensor Encoder
Agar putaran kedua roda sama digunakan encoder untuk mengetahui jumlah putaran motor. Dengan mengetahui jumlah putaran motor, maka dapat diketahui roda mana yang berputar lebih cepat, sehingga roda yang berputar lebih cepat itu dapat kita perlambat melalui mikrokontroler.
Encoder ini dibuat dengan cara menyambung potongan plat lingkaran pada as motor. Pada pinggir lingkaran dilubangi dengan jarak yang sama sebanyak duapuluh lubang. Lubang tersebut akan dideteksi oleh photointerrupter dimana
5 Port3
5.6K 330
5V
bila plat berlubang, maka output dari photointerrupter adalah Low, sedangkan pada saat photointerrupter terhalang oleh plat, maka output dari photointerrupter adalah High.
Gambar 3.7 Bentuk dan rangkaian Encoder
3.2.2 Rangkaian driver Motor DC
Rangkaian driver motor DC hanya memerlukan satu buah komponen elektronika yaitu IC L293D. IC L293D digunakan sebagai pembalik arah putaran motor DC dengan cara memberikan kondisi yang berbeda pada kaki-kaki input. Apabila kondisi di kaki-kaki input sama maka motor DC tidak dapat berputar. Skematis rangkaian driver motor DC dapat dilihat pada gambar 3.8.
Gambar 3.8
Satu buah L293D dapat memutarkan dua buah motor DC. Kaki L293D yang dihubungkan ke motor DC adalah kaki output. Tegangan output rangkaian akan tetap stabil. Tegangan input rangkaian ini adalah 5 V.
3.2.3 Rangkaian Dasar Mikrokontroller
Rangkaian dasar mikrokontroller dapat berfungsi dengan baik apabila dihubungkan dengan beberapa komponen elektronika. Komponen elektronika pada rangkaian dasar mikrokontroller ini terdiri dari resistor, kapasitor dan kristal osilator. Rangkaian dasar mikrokontroller AT89C51 dapat dilihat pada gambar 3.9.
Gambar 3.9
Rangkaian dasar mikrokontroller AT89C51
Rangkaian dasar mikrokontroller dihubungkan dengan rangkaian sensor dan rangkaian pembalik arah putaran motor DC. Mikrokontroller AT89C51 akan mengambil input berupa sinyal digital dari rangkaian sensor dan memberikan
output berupa sinyal digital ke rangkaian driver motor DC. Sinyal digital input dari sensor bisa mempengaruhi mikrokontroller AT89C51 untuk memutarkan motor DC.
3.3 Bagian-bagian Robot Pemadam Api
Bagian-bagian robot pemadam api terdiri dari sistem pendeteksi cahaya api lilin dan badan robot. Sistem pendeteksi cahaya api lilin berfungsi untuk mencari cahaya yang dipancarkan oleh api lilin. Badan robot berfungsi untuk menopang sistem pendeteksi cahaya api lilin.
Sistem pendeteksi cahaya api lilin adalah bagian dari robot yang terdiri dari sensor, kipas dan rangkaian elektronika. Sistem pendeteksi cahaya api lilin dipergunakan untuk mendeteksi cahaya yang dipancarkan oleh api lilin. Selain mendeteksi cahaya api lilin sistem ini dapat juga memadamkan api lilin.
Gambar 3.10 Sistem pendeteksi cahaya lilin
3.3.1 Badan Robot
Badan robot adalah bagian dari robot yang digunakan untuk menopang sistem pendeteksi cahaya lilin. Badan robot terdiri dari roda, motor DC dan rangkaian elektronika. Gambar badan robot dapat dilihat pada gambar 3.11
Gambar 3.11
Badan robot secara keseluruhan
3.3.2 Roda
Roda-roda pada robot pemadam api terdiri dari dua buah roda penggerak dan satu buah roda pengekor. Roda penggerak berfungsi untuk mengarahkan jalannya robot pemadam api. Gerakan yang dapat dilalui robot peniup lilin adalah gerakan maju mundur dan berbelok ke kiri atau ke kanan. Gerakan robot peniup lilin dapat dilihat pada gambar 3.12.
Gambar 3.12
Gerakan Robot Peniup Lilin
A
D C
Robot bergerak maju bila roda sebelah kanan berputar searah dengan arah jarum jam dan roda sebelah kiri berputar berlawanan arah dengan jarum jam (gambar 3.12 A). Penentuan roda kiri dan kanan dilihat dari arah depan. Penentuan arah putaran roda dilihat dari arah samping robot sesuai dengan posisi roda. Roda sebelah kiri dilihat dari samping kiri. Roda sebelah kanan dilihat dari samping kanan.
Robot bergerak mundur bila roda sebelah kanan berputar berlawanan arah dengan jarum jam dan roda sebelah kiri berputar searah dengan jarum jam (gambar 3.12 B). Robot belok ke kanan bila roda sebelah kiri dan roda sebelah kanan berputar berlawanan arah dengan jarum jam (gambar 3.12 C). Robot belok ke kiri bila roda sebelah kiri dan roda sebelah kanan berputar searah dengan jarum jam (gambar 3.12 D).
3.3.3 Kipas
Pada pembuatan robot pemadam api ini sebagai pemadamnya menggunakan angin atau kipas. Kipas yang digunakan kipas fan komputer, untuk lebih jelasnya lihat gambar 3.13
Gambar 3.13 Kipas Peniup api lilin
3.3.4 Motor DC
Motor DC berfungsi untuk memutarkan roda penggerak. Motor DC yang dipergunakan robot peniup lilin telah direduksi putarannya. Motor DC yang direduksi putarannya menghasilkan torsi yang cukup besar. Motor DC dapat dilihat pada gambar 3.14.
Gambar 3.14 Motor DC
Motor DC pada umumnya berputar searah jarum jam, tetapi dapat juga berputar berlawanan arah jarum jam. Pemasangan yang tidak sesuai antara terminal positif dan negatif dapat menyebabkan motor berputar berlawanan. Pemasangan terminal positif dan negatif dapat dilihat pada gambar 3.15.
Gambar 3.15
3.4 Perakitan Robot Pemadam Api
Perakitan robot pemadam api terdiri dari lima tahap. Tahap pertama adalah perakitan motor DC, encoder dan roda penggerak. Rakitan motor DC, encoder dan roda penggerak dapat dilihat pada gambar 3.16 (a).
Tahap kedua adalah rakitan roda pengekor dengan bagian bawah. Rakitan roda pengekor dapat dilihat pada gambar 3.16 (b).
(a) (b)
Gambar 3.16
(a) Rakitan motor DC ,encoder dan roda aktif (b) Rakitan roda pasif
Tahap ketiga adalah perakitan sistem pendeteksi cahaya lilin dengan rakitan yang telah jadi . Rakitan yang telah jadi dengan sistem pendeteksi cahaya lilin dapat dilihat pada gambar 3.17.
Gambar 3.17
Tahap keempat adalah perakitan sistem pendeteksi dinding dengan rakitan yang telah jadi. Rakitan yang telah jadi dengan sistem pendeteksi dinding dapat dilihat pada gambar 3.18.
Gambar 3.18
Rakitan sistem pendeteksi dinding
3.5 Langkah-Langkah Pembuatan Program
Program yang digunakan pada robot pemadam api ini dibuat dengan menggunakan bahasa pemrograman assembly. Program ditulis pada teks editor. Langkah-langkah pembuatan program dapat dilihat pada gambar 3.19.
Gambar 3.19
Ya Ya
Program dibuat sesuai dengan keinginan pembuat program. Sebelum program dibuat, langkah-langkah program harus ditentukan agar program tidak keluar dari yang direncanakan.
3.6 Alur Kerja Robot Pemadam Api
Alur kerja robot pemadam api digambarkan pada gambar 3.20 dibawah ini.
Gambar 3.20
Alur Kerja Robot Pemadam Api Start Ikuti Lorong Cek Lorong No Home No Ya Perbaiki Arah Cek Lilin Cek Ruang Padam No Stop Ya
Program dimulai dari posisi home, dengan motor berputar sampai sensor ultrasonic depan tidak terhalang dan motor akan maju. Motor akan bergeser ke kanan apabila sensor ultrasonic kiri pada jarak terdekat 10 cm dan motor akan bergeser ke kiri jika sensor ultrasonic kanan pada jarak terdekat 10 cm. Hal ini dilakukan agar robot tidak menabrak dinding.
Motor akan maju sampai sensor ultrasonic kanan/kiri menemukan jarak terjauh 15 cm. Setelah sensor ultrasonic menemukan jarak terjauh, maka motor berhenti dan berbelok ke arah sensor ultrasonic yang menemukan jarak terjauh tersebut, itu berarti robot telah menemukan letak ruangan.
Setelah robot menemukan letak ruangan tersebut, maka robot akan maju sampai sensor IR LED menemukan garis berwarna hitam kemudian berhenti dan melakukan proses scanning/ pencarian api dengan menggunakan sensor UVTron dan servo sebagai penggerak sensor UVTron untuk mengetahui letak cahaya api. Apabila hasil dari scanning tidak ditemukan cahaya api, maka robot akan mundur dan mencari letak ruangan berikutnya.
Apabila sensor UVTron menemukan adanya cahaya api pada ruangan tersebut, maka robot akan maju ke arah cahaya api yang dibatasi garis hitam dan berhenti setelah sensor IR LED menemukan garis hitam tersebut kemudian menghidupkan kipas dan servo untuk memadamkan api.
BAB IV
PENGUJIAN DAN ANALISA
Pada bab ini dibahas tentang pengujian rangkaian elektronika yang digunakan untuk mengontrol gerakan robot pada suatu ruangan yang dibatasi garis hitam. Hasil pengujian yang telah dilakukan dianalisa untuk mengetahui fenomena-fenomena yang terjadi.
4.1 Pengujian Tiap Rangkaian
Pengujian yang dilakukan terdiri dari pengujian rangkaian sensor, pengujian rangkaian driver motor DC, pengujian encoder dan pengujian rangkaian mikrokontroller. Rangkaian yang telah diuji selanjutnya digabung menjadi satu rangkaian. Pengujian yang dilakukan terhadap masing-masing rangkaian bertujuan untuk mengetahui kondisi setiap rangkaian.
4.1.1 Pengujian Rangkaian Sensor UVTron
Pengujian rangkaian sensor UVTron bertujuan untuk mengetahui apakah terjadi perubahan reaksi pada sensor UVTron jika dikenai cahaya api. Setelah dilakukan pengujian terhadap rangkaian sensor UVTron ternyata terjadi perubahan reaksi pada sensor UVTron setelah dikenai cahaya api, perubahan reaksi tersebut dapat dilihat pada osciloscope digital pada gambar 4.1 berikut ini.
Gambar 4.1
Bentuk gelombang output dari sensor UVTron setelah terkena cahaya api
Dari bentuk gelombang yang muncul pada osciloscope terlihat adanya tegangan pada output dari sensor UVTron sebesar 5,12 V setelah sensor UVTron terkena cahaya api. Dengan adanya tegangan pada output dari sensor UVTron, dapat dibuktikan bahwa sensor UVTron berfungsi dengan baik.
4.1.2 Pengujian Rangkaian Sensor Ultrasonic
Pengujian pada rangkaian sensor ultrasonic bertujuan untuk mengetahui apakah terjadi perubahan reaksi pada sensor ultrasonic jika sensor tersebut terhalang suatu bidang datar. Pengujian sensor ultrasonic dilakukan dengan cara membuat progran sederhana dengan jangkauan terdekat dan jangkauan terjauh yang dapat ditentukan dan hasil input dari sensor ultrasonic tersebut dihubungkan ke mikro yang telah kita program dan output dari mikro disambungkan ke LED
P0.0 P1.0 P0.1 P1.1 P0.2 P1.2 P0.3 P1.3 P0.4 P1.4 P0.5 P1.5 P0.6 P1.6 P0.7 P1.7
AT89C52
P3.0 P2.0 P3.1 P2.1 P3.2 P2.2 P3.3 P2.3 P3.4 P2.4 P3.5 P2.5 P3.6 P2.6 P3.7 P2.7sebagai indikator. Pada pengujian ini dibuat jangkauan terdekat adalah 10 cm dan jangkauan terjauh adalah 15 cm.
Gambar 4.2 Blok diagram pengujian sensor ultrasonic
Input dari ultrasonic akan menghasilkan dua eksekusi yaitu jangkauan terjauh dan jangkauan terdekat dan digunakan LED sebagai indikatornya.
Tabel 4.1 Hasil Uji Sensor Ultrasonic
Jarak 10 cm (dekat) Jarak 15 cm (jauh) Ultrasonic depan LED 1 ON LED 2 ON LED 1 ON LED 2 OFF Ultrasonic kanan LED 3 ON LED 4 ON LED 3 ON LED 4 OFF Ultrasonic belakang LED 5 ON LED 6 ON LED 5 ON LED 6 OFF Ultrasonic kiri LED 7 ON LED 8 ON LED 7 ON LED 8 OFF ULTRASONIC DEPAN ULTRASONIC KANAN ULTRASONIC KIRI ULTRASONIC BELAKANG LED 1 LED 2 LED 3 LED 4 LED 5 LED 6 LED 7 LED 8
4.1.3 Pengujian Rangkaian Sensor IR LED
Pengujian rangkaian sensor IR LED bertujuan untuk mengetahui perubahan reaksi photodioda jika dikenai cahaya IR LED. Reaksi photodioda dapat mempengaruhi kondisi tegangan di kaki output Op Amp. Kondisi kaki output Op Amp dapat dites menggunakan multitester, pengujian rangkian sensor IR LED dapat dilihat pada gambar 4.3
Gambar 4.3
Pengujian Sensor IRLED Dengan Menggunakan Multiterster
Pengujian rangkaian sensor ini dilakukan pada posisi IR LED dan photodioda sejajar. Dengan memposisikan IR LED dan photodioda sejajar maka cahaya IR LED tidak akan diterima photodioda secara langsung. Photodioda dapat menerima cahaya dari IR LED melalui pantulan benda atau bidang. Apabila cahaya IR LED dipantulkan pada bidang yang terang maka akan muncul angka pada multitester yang menandakan adanya tegangan pada rangkaian. Hal ini diakibatkan oleh kondisi tegangan yang keluar dikaki output Op Amp bernilai high. Apabila cahaya IR LED dipantulkan pada bidang yang gelap maka
Mulittester
multitester tidak menampilkan angka (nol). Hal ini diakibatkan oleh kondisi tegangan yang keluar dikaki output Op Amp bernilai low. Posisi IR LED dan photodioda pada bidang dapat dilihat pada gambar 4.4.
Gambar 4.4
Posisi IR LED dan photodioda pada bidang
4.1.4 Pengujian Rangkaian Driver Motor DC
Pengujian rangkaian driver motor DC dilakukan pada dua buah motor DC yang dihubungkan ke L293D dan mikrokontroller. Mikrokontroller AT89C51 digunakan untuk memberikan kondisi high atau low pada kaki input L293D. Skematik rangkaian pembalik arah putaran motor DC dapat dilihat pada gambar 4.5.
Gambar 4.5
Skematik Rangkaian Driver motor DC P1.0 P1.1 P1.2 P1.3
AT89C51
2 3 7 6 L293D 10 11 15 14 Motor DC Motor DCPengujian pertama dilakukan untuk mengatur arah putaran yang sama antara dua buah motor DC. Mikrokontroller AT89C51 memberi sinyal digital berharga 1 (high) dan sinyal digital berharga 0 (low) ke kaki input L293D. Sinyal digital berharga high diberikan ke kaki input-1 dan kaki input-3 L293D. Sinyal digital berharga low diberikan ke kaki input-2 dan kaki input-4 L293D. Variasi pemberian sinyal seperti ini menyebabkan ke dua buah motor DC berputar dengan arah putaran yang sama.
Pengujian kedua dilakukan untuk mengatur arah putaran yang berlawanan antara dua buah motor DC. Sinyal digital berharga high diberikan pada kaki input-1 dan kaki input-4 L293D. Sinyal digital berharga low diberikan pada kaki input-2 dan kaki input-3. Variasi pemberian sinyal seperti ini menyebabkan ke dua buah motor DC berputar dengan arah putaran yang berlawanan. Hasil dari pengujian driver motor DC dapat dilihat pada tabel 4.2 dibawah ini.
Tabel 4.2
Hasil Gerak Motor DC Setelah Diberikan Tegangan Sebesar 5 V
P1.3 P1.2 P1.1 P1.0
Maju 1 0 1 0
Mundur 0 1 0 1
Kanan 0 1 1 0
4.2Pengujian Robot Pemadam Api Keseluruhan
Pengujian robot pemadam api bertujuan untuk mengetahui apakah kondisi robot pemadam api dapat berfungsi sesuai dengan yang diharapkan atau tidak. Denah ruangan robot pemadam api dapat dilihat pada gambar 4.6 dibawah ini.
Gambar 4.6 Denah Ruangan Robot Pemadam Api HOME
Robot start pada posisi home dengan posisi depan diletakkan di mana saja. Pada posisi home tersebut robot akan meluruskan posisi depan ke arah lorong dengan memanfaatkan sensor ultrasonik yang diletakkan di badan robot bagian depan. Hal ini dapat dilihat pada gambar 4.7.
Gambar 4.7
Letak Robot Pada Posisi Home
Setelah robot menemukan posisi lorong, maka robot akan maju mengikuti lorong tersebut. Apabila posisi robot tidak lurus, maka sensor ultrasonic yang diletakkan di badan robot bagian kanan dan kiri akan meluruskan posisi robot agar tidak menabrak dinding. Hal ini dapat dilihat pada gambar 4.8.
Gambar 4.8
Robot akan terus menelusuri lorong sampai salah satu sensor kiri atau kanan menemukan letak ruangan. Ketika robot menemukan letak ruangan tersebut, robot berbelok dan maju kearah ruangan tersebut sampai menemukan garis hitam dan mulai proses scanning api pada ruangan tersebut. Proses scanning api pada ruangan dapat dilihat pada gambar 4.9.
Gambar 4.9
Robot melakukan proses scanning api pada ruangan
Apabila robot menemukan api pada ruangan, maka robot akan mendekati cahaya api tersebut sampai menemukan garis hitam dan memadamkan api tersebut. Proses pemadaman dapat dilihat pada gambar 4.10 dibawah ini.
Gambar 4.10 Proses pemadaman api
BAB V PENUTUP
5.1 Kesimpulan
Telah dilakukan pengujian terhadap rangkaian sensor, rangkaian driver motor DC dan rangkaian mikrokontroller. Hasil pengujian menunjukkan bahwa rangkaian sensor, rangkaian driver motor DC, dan rangkaian mikrokontroller dapat berjalan dengan baik. Robot pemadam api dapat berfungsi dengan baik sesuai dengan tujuan pembuatan dan perancangan robot.
5.2 Saran
Robot pemadam api yang dibuat masih memiliki kekurangan sehingga perlu penyempurnaan diantaranya penyempurnaan sensor sistem pendeteksi cahaya lilin dan sistem pendeteksi dinding. Sensor sistem pendeteksi cahaya lilin tidak terlalu presisi untuk menentukan posisi letak lilin. Agar robot pemadam api dapat lebih presisi maka harus menggunakan 2 sensor UVTron yang diletakkan sejajar untuk mendeteksi cahaya api lilin. Untuk sensor pendeteksi dinding masih kurang untuk menemukan letak ruangan, sebaiknya diletakkan setengah lingkaran di depan badan robot agar lebih akurat.
DAFTAR PUSTAKA
Malvino, Albert Paul, Electronic Principle, 5th ed. Newyork : McGraw-Hill, 1993.
Nalwan, Paulus Andi. Panduan Praktis Teknik Antarmuka dan Pemrograman
Mikrokontroler AT89C51. Jakarta: PT Elex Media Komputindo, 2003.
Budiharto, Widodo. Perancangan Sistem dan Aplikasi Mikrokontroler. Jakarta: PT Elex Media Komputindo, 2002.
Bolyestad, Robert. Dan Louis Nashelsky, Electronic Device And Circuit
Theory, Prentice Hall, Inc., New Jersey, 1996.
Blocher, Richard. 2003. Dasar Elektronika, cetakan pertama, yogyakarta : Andi Offset Yogyakarta.
Megahertz. 1995. Diktat Elektronika Dasar 1&2, Jakarta : Megahertz.
www.google.com/ Robot Pemadam Api/, Sistem Pendeteksi Cahaya 30 April 2007
www.google.com/ATMEL/ Microcontroler AT 89C51, Bahasa Asembly. Jakarta 25 Mei 2007
www.google.com/ LDR/Rangkaian Sensor LDR, Cara Kerja Sensor Memakai penguat komparator.Jakarta, 30 April 2007
www.google.com/ IR LED/Rangkaia Sensor IR LED Terhadap
www.google.com/ LM324/IC Op-Amp LM 324, Sebagai penguat Komparator. Jakarta, 17 Mei 2007
www.google.com/ L293D/IC Pengatur Putaran Motor DC L 293D, Sebagai pengendali putaran 2 buah motor. Jakarta, 30 April 2007 www.google.com/ IC Regulator 7805, Sebagai Regulator Untuk Mensuply
LISTING PROGRAM
ROBOT PEMADAM API
$MOD51
MOTOR EQU P1 MAJU_ EQU 0AH KANAN_ EQU 09H KIRI_ EQU 06H MUNDUR_ EQU 05H STOP_ EQU 00H
KIPAS EQU P2.0 ;active LOW API EQU P0.2 ;active HIGH GARIS EQU P0.0 ;active LOW
DSEG ORG 30H loop: DS 2 CSEG SJMP START ORG 30H
START: MOV TMOD,#11H MOV MOTOR,#STOP_
SETB KIPAS ;kipas OFF
ulang: ACALL putar ACALL maju ACALL tiup ACALL mundur
SJMP ulang
putar: MOV MOTOR,#KANAN_
JNB API,$ ;cari api ON
RET
maju: MOV MOTOR,#MAJU_
JB GARIS,$ ;tunggu garis
RET
tiup: MOV MOTOR,#STOP_
CLR KIPAS ;kipas ON
d7: ACALL delay7s
JB API,d7 ;tunggu api OFF
RET
mundur: MOV MOTOR,#MUNDUR_
SETB KIPAS ;kipas OFF
ACALL delay3s RET delay3s: MOV loop,#60 d50ms: ACALL delay50ms DJNZ loop,d50ms RET delay7s: MOV loop,#140 d5ms: ACALL delay50ms
DJNZ loop,d5ms RET delay50ms: CLR TR0 MOV TH0,#HIGH -50000 MOV TL0,#LOW -50000 CLR TF0 SETB TR0 JNB TF0,$ RET END