Kontrol Penjejak Pada Robot Pemadam Api
Menggunakan Sistem Pengindera Api Dan
Posisi Jarak Dengan Metode Fuzzy Logic
Pungky Eka Sasmita, Dr.Tri Arief Sardjono, ST. MT., Ir. Harris Pirngadi, MT.Jurusan Teknik Elektro FTI - ITS
Abstrak—Musibah kebakaran yang sering terjadi telah menimbulkan banyak korban jiwa dan kerugian harta benda. Terdapat resiko yang harus ditanggung oleh tim pemadam kebakaran pada saat memadamkan api didalam suatu ruangan seperti tertimpa benda yang jatuh dari atap bangunan atau kebakaran yang semakin membesar.
Pada tugas akhir ini akan dibuat robot pemadam api menggunakan robot hexapod dengan mengambil contoh kebakaran yang disimulasikan dalam lapangan Kontes Robot Cerdas Indonesia. Robot ini dalam bekerja dirancang menggunakan empat jenis sensor, antara lain sensor ultrasonik untuk deteksi jarak, sensor uv-tron untuk deteksi ada tidaknya api, sensor TPA81 untuk deteksi posisi api di ruangan dan sensor garis untuk membedakan antara lorong dan ruangan dalam lapangan KRCI. Sistem navigasi robot ini didesain berbasis metode fuzzy logic untuk penerapan algoritma wall following dalam menyelusuri lapangan untuk mencapai ruangan dimana tempat api berada.
Hal yang ingin diperoleh dari perancangan kontroler menggunakan metode fuzzy logic adalah mendapatkan mobilitas yang baik dari robot pemadam api dalam hal menyelusuri ruangan dalam usaha menemukan api dan memadamkannya serta kembali ke home. Berdasarkan pengujian didapatkan bahwa kemampuan sistem dalam melaksanakan misi pemadaman api yang dibuat memiliki tingkat keberhasilan sekitar 75%.
Kata Kunci : sensor ultrasonik, robot pemadam api, wall following, fuzzy logic.
I. PENDAHULUAN
Seiring perkembangan teknologi, pekerjaan manusia saat ini mulai dapat digantikan oleh robot. Akan tetapi robot diciptakan bukan untuk menggantikan manusia sepenuhnya karena walau bagaimanapun ada pekerjan-pekerjaan tertentu yang tidak dapat digantikan dan diselesaikan oleh robot tanpa bantuan manusia dan begitu pula sebaliknya. Robot diciptakan untuk memudahkan manusia dalam menyelesaikan masalah, contohnya dalam memadamkan api atau kebakaran, resiko yang harus ditanggung oleh tim pemadam kebakaran sangat tinggi, untuk itu diciptakanlah Robot Pemadam Api untuk membantu manusia dalam pekerjaan ini. Pada Tugas Akhir ini penulis mengambil contoh
kebakaran di rumah yang sering terjadi untuk disimulasikan dalam lapangan Kontes Robot Cerdas Indonesia. Kemampuan robot dalam menyelesaikan misinya sangat diperhitungkan. Untuk itu diperlukan sistem navigasi yang handal sehingga dapat menunjang kinerja optimum robot.
Dari latar belakang tersebut, penulis mencoba menyelesaikan masalah di atas yaitu khususnya pada sistem navigasi dan pencarian posisi api. Penggunaan kontroler fuzzy dalam perancangan robot pemadam api tersebut untuk menghasilkan navigasi yang efisien dalam mencapai target titik api yang akan dipadamkan.
II. TEORI PENUNJANG
Pada bab ini akan membahas mengenai teori penunjang dan teori dasar dari komponen-komponen sistem yang digunakan dalam perencanaan dan pembuatan robot pemadam api hexapod.
A. UV-tron Hamamatsu R2868 dan Driver Circuit C3604 [1]
Sensor UV-tron Hamamatsu R2868 dapat mendeteksi ada tidaknya api dengan mendeteksi cahaya pada panjang gelombang 185 nm hingga 260 nm. Panjang gelombang ini adalah panjang gelombang yang dimiliki oleh api. Dalam prosesnya, sensor ini ternyata cukup sensitif dengan percikan-percikan api kecil dan noise-noise lainnya yang mungkin terjadi di lingkungan. Untuk menghasilkan data output yang baik, sensor ini perlu dihubungkan ke driver circuit C3604 yang berfungsi sebagai filter dari sensor R2868 tersebut. Bentuk fisik sensor ini ditampilkan pada Gambar 1.
Gambar 1 Bentuk fisik sensor Hamamatsu R2868 dan driver circuit C3604
Bentuk dari sensor R2868 ini seperti bohlam kecil. Dalam aplikasinya, sensor ini memiliki sensitivitas angular yang lebar (diperlihatkan pada Gambar 2) sehingga dapat secara mendeteksi radiasi ultraviolet yang diemisikan dari api tanpa terbatas oleh sudut deteksinya. Sensor ini dapat mendeteksi api pada jarak 5 meter. Bentuk keluaran dari sensor ini adalah pulsa. Semakin besar intensitas cahaya api yang diterima oleh sensor, semakin banyak pula jumlah pulsa yang dihasilkan.
Gambar 2 Sudut deteksi sensor Hamamatsu R2868 B. Sensor Panas TPA-81 [2]
Sensor TPA-81 merupakan sensor thermopile array yang dapat mendeteksi sinyal infrared dengan panjang gelombang antara 2- 22 um. Panjang gelombang tersebut merupakan panjang gelombang dari panas. Untuk menghasilkan data panas yang akurat untuk jarak jauh, sensor ini dilengkapi dengan lensa dengan tujuan memperkecil sudut deteksi hingga 12 derajat. Tanpa penggunaan lensa ini sensor thermopile memiliki sudut deteksi yang lebar hingga 100 derajat. Pin-pin koneksi sensor ini diperlihatkan pada Gambar 3.
Gambar 3 Bentuk fisik sensor panas TPA-81
Mekanisme pengambilan data dari sensor TPA-81 ini menggunakan mekanisme I2C dengan alamat device TPA-81 adalah 0xD0. Untuk mendapatkan hasil pembacaan sensor yang akurat, sensor ini perlu diarahkan selama 40 ms kearah tujuan sebelum data konversi panas diakses.
C. Modul Sensor Ultrasonik SRF04 [3]
Modul Ultrasonik SRF04 merupakan modul sensor jarak yang mampu mendeteksi jarak halangan pada rentang 3 cm hingga 3 meter, sensor ini diletakkan pada bagian depan robot dan bagian kiri dan kanan. Sensor SRF04 ini memiliki sudut deteksi yang lebar. Sudut deteksi yang lebar ini menyebabkan halangan yang mempengaruhi keluaran sensor ini tidak hanya terdiri dari halangan yang tegak lurus terhadap sensor, tetapi juga halangan yang bersudut hingga 30 derajat dari sensor. Bentuk fisik sensor SRF04 dan sudut deteksinya diperlihatkan pada Gambar 4.
Gambar 4 Bentuk fisik sensor SRF04 dan sudut deteksinya
Mekanisme kerja sensor ini adalah dengan cara menggenerate sinyal terosilasi dengan kecepatan suara (300m/s). Sinyal terosilasi tersebut akan memantul balik ke modul SRF04 bila mengenai rintangan. Lama waktu antara transmisi pulsa dan penerimaan pulsa tersebutlah yang akan menentukan jarak rintangan dari sensor.
D. Metode Fuzzy Logic
Logika fuzzy merupakan representasi suatu pengetahuan yang dikonstruksikan dengan perintah if then rules [4]. Karakteristik dari metode ini adalah:
• Pemecahan masalah dilakukan dengan menjelaskan sistem bukan lewat angka-angka, melainkan secara linguistik, atau variabelvariabel yang mengandung ketakpastian/ketidaktegasan.
• Pemakaian perintah if-then rules untuk menjelaskan kaitan antara satu variabel dengan yang lain.
Pada perancangan logika fuzzy ditetapkan jenis metode fuzzy Mamdani. Metode Mamdani sering juga dikenal dengan nama Metode Max-Min. Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun 1975. Untuk memperoleh output, diperlukan 4 tahapan yaitu :
1. Pembentukan himpunan fuzzy Pada metoda mamdani, baik variabel input maupun variabel output dibagi menjadi satu atau lebih himpunan fuzzy.
2. Aplikasi fungsi implikasi (aturan) pada metode Mamdani, fungsi implikasi yang digunakan adalah MIN
3. Komponen aturan pada tahapan ini sistem terdiri dari beberapa aturan, maka
inferensi diperoleh dari kumpulan dan korelasi antar aturan. Ada 3 metode yang digunakan dalam melakukan inferensi system fuzzy, yaitu : max, additive dan probabilistic OR. Pada metode max, solusi himpunan fuzzy diperoleh dengan cara mengambil nilai maksimum aturan, kemudian menggunakannya untuk memodifikasi daerah fuzzy, dan mengaplikasikanya ke output dengan menggunakan operator OR (union). 4. Penegasan (defuzzifikasi) Input dari proses
defuzzifikasi adalah suatu himpunan fuzzy yang diperoleh dari komposisi aturan-aturan fuzzy, sedangkan output yang dihasilkan merupakan suatu bilangan pada domain himpunan fuzzy tersebut. Jika diberikan suatu himpunan fuzzy dalam range tertentu, maka harus dapat di ambil suatu nilai crisp tertentu sebagai output.
III. PERANCANGAN ALAT
Pada tahap ini akan dibahas perancangan alat mulai dari desain mekanik, desain elektronik, serta desain software. Perancangan alat dibuat secara bertahap dimulai dari desain mekanik, setelah selesai maka dilanjutka dengan desain rangkaian elektronik atau hardware, dan tahap akhir adalah desain software.
A. Perancangan Mekanik
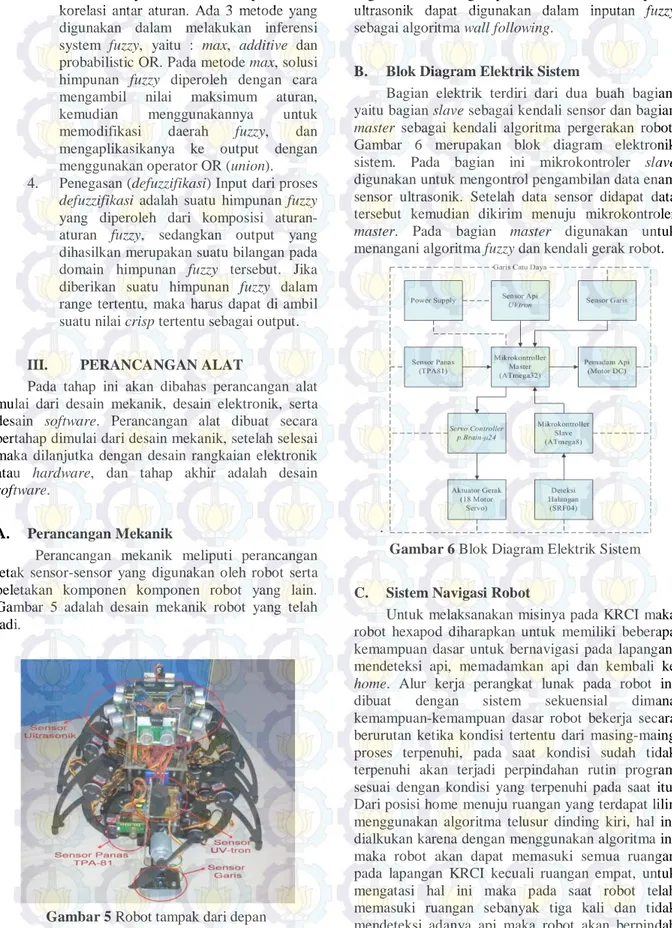
Perancangan mekanik meliputi perancangan letak sensor-sensor yang digunakan oleh robot serta peletakan komponen komponen robot yang lain. Gambar 5 adalah desain mekanik robot yang telah jadi.
Gambar 5 Robot tampak dari depan
Sensor ultrasonik pada robot hexapod diposisikan pada bagian depan tengah, depan samping kanan, depan samping kiri, samping kanan tengah, samping kiri tengah dan belakang pada
bagian robot. Dengan posisi tersebut data outputan ultrasonik dapat digunakan dalam inputan fuzzy sebagai algoritma wall following.
B. Blok Diagram Elektrik Sistem
Bagian elektrik terdiri dari dua buah bagian, yaitu bagian slave sebagai kendali sensor dan bagian master sebagai kendali algoritma pergerakan robot. Gambar 6 merupakan blok diagram elektronik sistem. Pada bagian ini mikrokontroler slave digunakan untuk mengontrol pengambilan data enam sensor ultrasonik. Setelah data sensor didapat data tersebut kemudian dikirim menuju mikrokontroler master. Pada bagian master digunakan untuk menangani algoritma fuzzy dan kendali gerak robot.
.
Gambar 6 Blok Diagram Elektrik Sistem C. Sistem Navigasi Robot
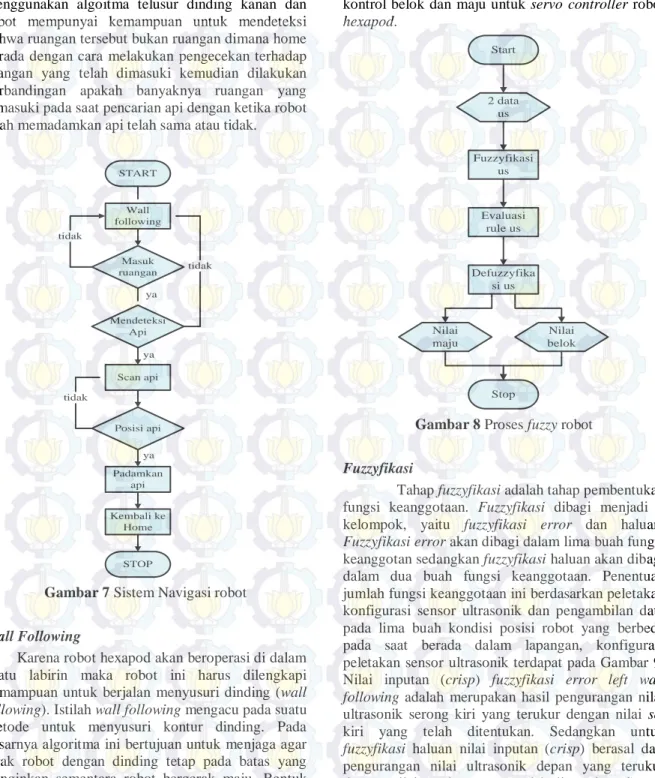
Untuk melaksanakan misinya pada KRCI maka robot hexapod diharapkan untuk memiliki beberapa kemampuan dasar untuk bernavigasi pada lapangan, mendeteksi api, memadamkan api dan kembali ke home. Alur kerja perangkat lunak pada robot ini dibuat dengan sistem sekuensial dimana kemampuan-kemampuan dasar robot bekerja secara berurutan ketika kondisi tertentu dari masing-maing proses terpenuhi, pada saat kondisi sudah tidak terpenuhi akan terjadi perpindahan rutin program sesuai dengan kondisi yang terpenuhi pada saat itu. Dari posisi home menuju ruangan yang terdapat lilin menggunakan algoritma telusur dinding kiri, hal ini dialkukan karena dengan menggunakan algoritma ini maka robot akan dapat memasuki semua ruangan pada lapangan KRCI kecuali ruangan empat, untuk mengatasi hal ini maka pada saat robot telah memasuki ruangan sebanyak tiga kali dan tidak mendeteksi adanya api maka robot akan berpindah algoritma dari telusur dinding kiri menjadi telusur dinding kanan.
Setelah memadamkan api maka robot harus kembali ke posisi home, pada saat kondisi ini robot
menggunakan algoitma telusur dinding kanan dan robot mempunyai kemampuan untuk mendeteksi bahwa ruangan tersebut bukan ruangan dimana home berada dengan cara melakukan pengecekan terhadap ruangan yang telah dimasuki kemudian dilakukan perbandingan apakah banyaknya ruangan yang dimasuki pada saat pencarian api dengan ketika robot telah memadamkan api telah sama atau tidak.
START Mendeteksi Api Scan api ya ya tidak Posisi api Padamkan api STOP ya tidak Wall following Masuk ruangan tidak Kembali ke Home
Gambar 7 Sistem Navigasi robot Wall Following
Karena robot hexapod akan beroperasi di dalam suatu labirin maka robot ini harus dilengkapi kemampuan untuk berjalan menyusuri dinding (wall following). Istilah wall following mengacu pada suatu metode untuk menyusuri kontur dinding. Pada dasarnya algoritma ini bertujuan untuk menjaga agar jarak robot dengan dinding tetap pada batas yang diinginkan sementara robot bergerak maju. Bentuk algoritma, jumlah sensor dan jenis sensor yang digunakan untuk wall following sangat beragam sesuai dengan perilaku robot yang dharapkan. Dalam penerapannya pada robot hexapod metode wall following dibagi menjadi dua yaitu left wall following dan right wall following. Algoritma wall following pada robot hexapod akan diimplementasikan menggunakan metode fuzzy logic.
Proses dalam metode fuzzy akan dibagi menjadi tiga, yaitu : fuzzyfikasi, evaluasi rule, dan defuzzyfikasi. Gambar 8 merupakan proses metode fuzzy dari data sensor hingga menghasilkan nilai
kontrol belok dan maju untuk servo controller robot hexapod. 2 data us Start Fuzzyfikasi us Evaluasi rule us Defuzzyfika si us Nilai belok Nilai maju Stop
Gambar 8 Proses fuzzy robot Fuzzyfikasi
Tahap fuzzyfikasi adalah tahap pembentukan fungsi keanggotaan. Fuzzyfikasi dibagi menjadi 2 kelompok, yaitu fuzzyfikasi error dan haluan. Fuzzyfikasi error akan dibagi dalam lima buah fungsi keanggotan sedangkan fuzzyfikasi haluan akan dibagi dalam dua buah fungsi keanggotaan. Penentuan jumlah fungsi keanggotaan ini berdasarkan peletakan konfigurasi sensor ultrasonik dan pengambilan data pada lima buah kondisi posisi robot yang berbeda pada saat berada dalam lapangan, konfigurasi peletakan sensor ultrasonik terdapat pada Gambar 9. Nilai inputan (crisp) fuzzyfikasi error left wall following adalah merupakan hasil pengurangan nilai ultrasonik serong kiri yang terukur dengan nilai set kiri yang telah ditentukan. Sedangkan untuk fuzzyfikasi haluan nilai inputan (crisp) berasal dari pengurangan nilai ultrasonik depan yang terukur dengan nilai set depan yang telah ditentukan. Secara matematis ditunjukkan pada persamaan berikut :
• error = data_ultrasonik1 – set_kiri • haluan = data_ultrasonik2 – set_depan
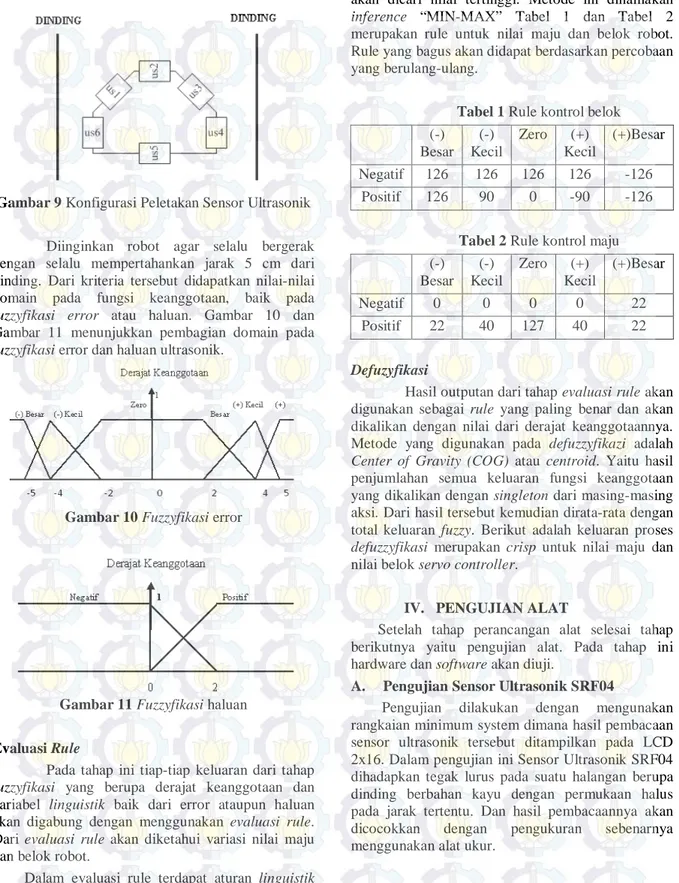
Gambar 9 Konfigurasi Peletakan Sensor Ultrasonik Diinginkan robot agar selalu bergerak dengan selalu mempertahankan jarak 5 cm dari dinding. Dari kriteria tersebut didapatkan nilai-nilai domain pada fungsi keanggotaan, baik pada fuzzyfikasi error atau haluan. Gambar 10 dan Gambar 11 menunjukkan pembagian domain pada fuzzyfikasi error dan haluan ultrasonik.
Gambar 10 Fuzzyfikasi error
Gambar 11 Fuzzyfikasi haluan Evaluasi Rule
Pada tahap ini tiap-tiap keluaran dari tahap fuzzyfikasi yang berupa derajat keanggotaan dan variabel linguistik baik dari error ataupun haluan akan digabung dengan menggunakan evaluasi rule. Dari evaluasi rule akan diketahui variasi nilai maju dan belok robot.
Dalam evaluasi rule terdapat aturan linguistik untuk menentukan aksi kontrol terhadap nilai masukan dari fuzzyfikasi. Langkah pertama adalah evaluasi hubungan atau derajat antecedent setiap aturan. Berikutnya dilakukan pencarian derajat kebenaran untuk setiap rule, dengan menggunakan hubungan “AND” atau nilai minimum. Setelah didapat derajat kebenaran untuk tiap aksi yang sama
akan dicari nilai tertinggi. Metode ini dinamakan inference “MIN-MAX” Tabel 1 dan Tabel 2 merupakan rule untuk nilai maju dan belok robot. Rule yang bagus akan didapat berdasarkan percobaan yang berulang-ulang.
Tabel 1 Rule kontrol belok (-) Besar (-) Kecil Zero (+) Kecil (+)Besar Negatif 126 126 126 126 -126 Positif 126 90 0 -90 -126 Tabel 2 Rule kontrol maju (-) Besar (-) Kecil Zero (+) Kecil (+)Besar Negatif 0 0 0 0 22 Positif 22 40 127 40 22 Defuzyfikasi
Hasil outputan dari tahap evaluasi rule akan digunakan sebagai rule yang paling benar dan akan dikalikan dengan nilai dari derajat keanggotaannya. Metode yang digunakan pada defuzzyfikazi adalah Center of Gravity (COG) atau centroid. Yaitu hasil penjumlahan semua keluaran fungsi keanggotaan yang dikalikan dengan singleton dari masing-masing aksi. Dari hasil tersebut kemudian dirata-rata dengan total keluaran fuzzy. Berikut adalah keluaran proses defuzzyfikasi merupakan crisp untuk nilai maju dan nilai belok servo controller.
IV. PENGUJIAN ALAT
Setelah tahap perancangan alat selesai tahap berikutnya yaitu pengujian alat. Pada tahap ini hardware dan software akan diuji.
A. Pengujian Sensor Ultrasonik SRF04
Pengujian dilakukan dengan mengunakan rangkaian minimum system dimana hasil pembacaan sensor ultrasonik tersebut ditampilkan pada LCD 2x16. Dalam pengujian ini Sensor Ultrasonik SRF04 dihadapkan tegak lurus pada suatu halangan berupa dinding berbahan kayu dengan permukaan halus pada jarak tertentu. Dan hasil pembacaannya akan dicocokkan dengan pengukuran sebenarnya menggunakan alat ukur.
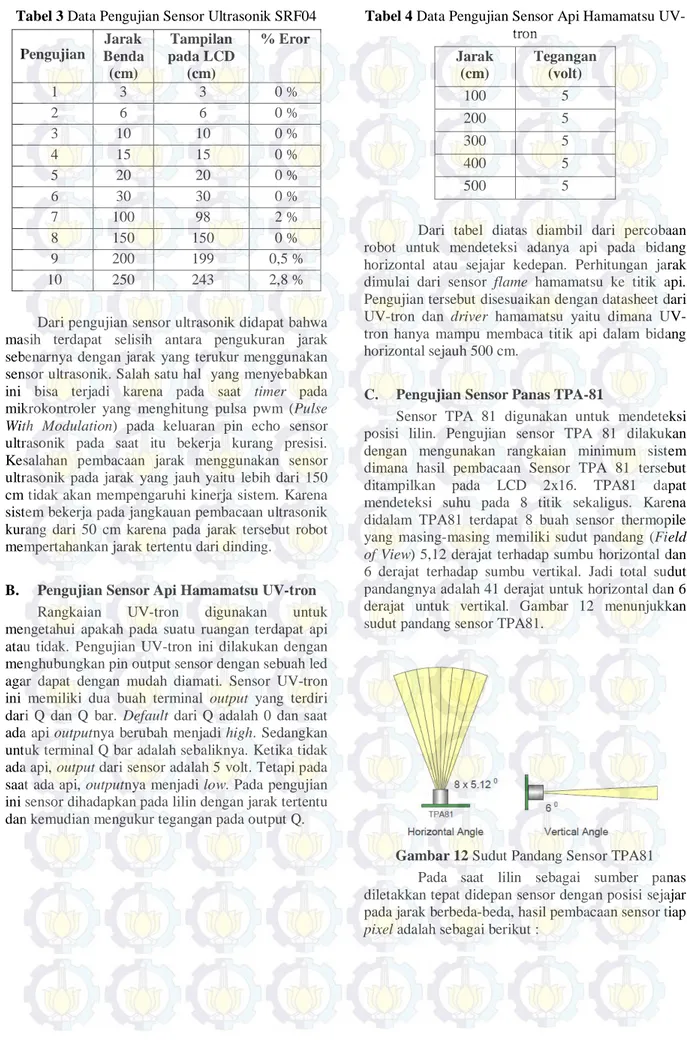
Tabel 3 Data Pengujian Sensor Ultrasonik SRF04 Pengujian Jarak Benda (cm) Tampilan pada LCD (cm) % Eror 1 3 3 0 % 2 6 6 0 % 3 10 10 0 % 4 15 15 0 % 5 20 20 0 % 6 30 30 0 % 7 100 98 2 % 8 150 150 0 % 9 200 199 0,5 % 10 250 243 2,8 %
Dari pengujian sensor ultrasonik didapat bahwa masih terdapat selisih antara pengukuran jarak sebenarnya dengan jarak yang terukur menggunakan sensor ultrasonik. Salah satu hal yang menyebabkan ini bisa terjadi karena pada saat timer pada mikrokontroler yang menghitung pulsa pwm (Pulse With Modulation) pada keluaran pin echo sensor ultrasonik pada saat itu bekerja kurang presisi. Kesalahan pembacaan jarak menggunakan sensor ultrasonik pada jarak yang jauh yaitu lebih dari 150 cm tidak akan mempengaruhi kinerja sistem. Karena sistem bekerja pada jangkauan pembacaan ultrasonik kurang dari 50 cm karena pada jarak tersebut robot mempertahankan jarak tertentu dari dinding.
B. Pengujian Sensor Api Hamamatsu UV-tron Rangkaian UV-tron digunakan untuk mengetahui apakah pada suatu ruangan terdapat api atau tidak. Pengujian UV-tron ini dilakukan dengan menghubungkan pin output sensor dengan sebuah led agar dapat dengan mudah diamati. Sensor UV-tron ini memiliki dua buah terminal output yang terdiri dari Q dan Q bar. Default dari Q adalah 0 dan saat ada api outputnya berubah menjadi high. Sedangkan untuk terminal Q bar adalah sebaliknya. Ketika tidak ada api, output dari sensor adalah 5 volt. Tetapi pada saat ada api, outputnya menjadi low. Pada pengujian ini sensor dihadapkan pada lilin dengan jarak tertentu dan kemudian mengukur tegangan pada output Q.
Tabel 4 Data Pengujian Sensor Api Hamamatsu UV-tron Jarak (cm) Tegangan (volt) 100 5 200 5 300 5 400 5 500 5
Dari tabel diatas diambil dari percobaan robot untuk mendeteksi adanya api pada bidang horizontal atau sejajar kedepan. Perhitungan jarak dimulai dari sensor flame hamamatsu ke titik api. Pengujian tersebut disesuaikan dengan datasheet dari UV-tron dan driver hamamatsu yaitu dimana UV-tron hanya mampu membaca titik api dalam bidang horizontal sejauh 500 cm.
C. Pengujian Sensor Panas TPA-81
Sensor TPA 81 digunakan untuk mendeteksi posisi lilin. Pengujian sensor TPA 81 dilakukan dengan mengunakan rangkaian minimum sistem dimana hasil pembacaan Sensor TPA 81 tersebut ditampilkan pada LCD 2x16. TPA81 dapat mendeteksi suhu pada 8 titik sekaligus. Karena didalam TPA81 terdapat 8 buah sensor thermopile yang masing-masing memiliki sudut pandang (Field of View) 5,12 derajat terhadap sumbu horizontal dan 6 derajat terhadap sumbu vertikal. Jadi total sudut pandangnya adalah 41 derajat untuk horizontal dan 6 derajat untuk vertikal. Gambar 12 menunjukkan sudut pandang sensor TPA81.
Gambar 12 Sudut Pandang Sensor TPA81 Pada saat lilin sebagai sumber panas diletakkan tepat didepan sensor dengan posisi sejajar pada jarak berbeda-beda, hasil pembacaan sensor tiap pixel adalah sebagai berikut :
Tabel 5 Data Pengujian Sensor TPA-81 Ja
ra k
Data Sensor per pixel (desimal) o C
1 2 3 4 5 6 7 8 2 11 4 16 7 16 8 16 4 16 1 15 8 16 6 16 5 3 86 14 2 17 1 16 6 16 3 16 0 11 4 80 10 35 19 43 82 15 8 55 42 41 20 34 36 36 43 15 1 50 38 34 30 33 35 35 37 87 39 33 31 50 32 32 35 30 70 35 33 31 10 0 32 34 32 32 60 40 33 30 Dari tabel diatas, tampak bahwa pada jarak 1 m lilin masih dapat terdeteksi. Pada jarak tersebut, suhu yang terukur pada sensor adalah 60ºC. semakin dekat dengan sensor, nilai suhu yang terukur semakin besar. Seperti pada saat jarak dengan lilin 50 cm, nilai suhu terbesar yang terukur adalah 70º C. Pada saat jarak 2 cm dengan lilin, data yang terukur sangat besar, yaitu 168º C. Dengan demikian sensor ini dapat digunakan untuk mendeteksi lilin sampai jarak 1 m dengan data yang valid. Berdasarkan datasheet, sensor ini dapat digunakan untuk mendeteksi lilin sampai jarak 2 meter. Semakin dekat lilin maka sensor yang mendeteksi akan semakin banyak juga. Sensor yang tidak mendeteksi lilin akan menunjukkan suhu yang terukur pada sensor tersebut, yaitu suhu ruangan dan lingkungan sekitar. D. Pengujian Sistem Secara Keseluruhan
Pengujian disini menampilkan data berhasil atau tidaknya robot untuk menuju ke ruangan dengan tepat, menemukan posisi lilin dan berhasil memadamkan api serta robot dapat kembali ke home. Lapangan yang dipakai untuk mengetahui seberapa bagus algoritma yang diimplementasikan dalam sistem robot ini mempunyai konfigurasi seperti pada Gambar 13.
Gambar 13 Konfigurasi Lapangan [5]
Tabel 6 Hasil Pengujian Misi Pemadaman Api Perco baan Ruanga n Posisi Start Ruang an Posisi Api Memada mkan api Kemb ali ke Home 1 Normal 1 Ya Ya
2 Normal 2 Tidak Tidak
3 1 2 Ya Ya 4 1 3 Ya Ya 5 2 3 Ya Ya 6 2 1 Ya Ya 7 3 1 Tidak Tidak 8 3 2 Ya Ya
Dari data pengujian diatas, robot mengalami 2 kali kegagalan dalam misi pemadaman api dalam hal ini dikarenakan pergerakan robot yang berosilasi mengakibatkan terdapat posisi yang tidak ideal pada saat robot akan melakukan pergerakan memutar sehingga mengakibatkan robot mendefinisikan kondisi saat itu adalah kondisi yang sesuai dengan algoritma yang dipakai pada robot tersebut padahal kondisi tersebut seharusnya tidak terjadi. Selain itu masalah utama yang menyebabkan kegagalan dalam misi pemadaman api adalah dikarenakan kaki robot tersangkut pada dinding.
V. PENUTUP
Setelah melakukan perencanaan alat dan pembuatan sistem kemudian dilakukan pengujian dan analisa dari robot, maka diperoleh beberapa kesimpulan dan saran yang diharapkan berguna bagi kelanjutan dalam rangka penyempurnaan robot yang akan datang.
A. Kesimpulan
1 Didapatkan tingkat keberhasilan robot dalam melakukan misi pemadaman api dan kembali ke home sebesar 75%.
2 Robot akan menghasilkan pergerakan yang tidak akurat pada saat suplai tegangan pada motor servo bernilai 5 Volt.
3 Penggunaan algoritma left wall following pada saat robot mencari api di arena KRCI menggunakan metode fuzzy logic berhasil membuat robot menemukan sumber api dan memadamkannya dengan prosentase keberhasilan 75%.
4 Didapatkan hasil pengukuran suhu terhadap sumber api sebesar 169o pada saat sensor berada 3 cm terhadap sumber api.
5 Penggunaan algoritma left wall following pada saat robot berjalan pada lintasan lurus menghasilkan prosentase keberhasilan 100%.
6 Metode navigasi wall following mempermudah pembuatan rule dari kontrol fuzzy, hal ini karena hanya ada 2 variabel input yaitu error dan haluan sehingga tidak perlu lagi memfuzzykan setiap input (6 input sensor ultrasonik) yang mengakibatkan banyaknya kombinasi dari rule yang ada.
B. Saran
1. Penggunaan waktu sampling yang lebih kecil untuk akuisisi data dari mikrokontroler slave menuju mikrokontroler master dapat meningkatkan performa respon gerak pada robot hexapod
2. Dalam merancang perangkat lunak pada robot, alur tugas yang harus dikerjakan oleh mikrokontroler harus memiliki urutan pengerjaan dari prioritas yang tinggi ke prioritas yang rendah. Hal ini dilakukan agar mikrokontroler dapat memberikan respon yang tepat sesuai dengan kondisi yang terjadi pada saat itu.
REFERENSI
[1] ….., 1997, HAMAMATSU PHOTONICS K.K., Electron Tube Center CR Created in Japan. [2] ….., 200, Datasheet_TPA-81.
<URL:http://www.activerobots.com/products/ac cessories/sensors.h ml>
[3] ….., 2003, SRF04, <URL:http://www.parallax.com/>
[4] Pirjanian, P.(1999) ,“Behavior coordination mechanisms—State-of-the-art”, Techical Report
IRIS (Institute of Robotics and Intelligent Systems),University of Southern California, hal 99- 375.
[5] Panduan Kontes Robot Cerdas Indonesia 2011, <URL;http://www.kri.or.id/>
RIWAYAT HIDUP PENULIS
Penulis dilahirkan di Situbondo pada tanggal 4 Desember 1987 bernama Pungky Eka Sasmita. Putra pertama dari dua bersaudara. Selama menjadi mahasiswa penulis aktif sebagai asisten laboratorium dan anggota kegiatan komunitas robot di Jurusan Teknik Elektro dan ITS.
Riwayat Pendidikan :
1994 – 2000 : SD Negeri 1 Kalimas Besuki 2000 – 2003 : SLTP Negeri 1 Situbondo
2003 – 2006 : SMA Negeri 1 Situbondo 2006 – 2009 : Bidang Studi Komputer
Kontrol, Program Studi D3 Teknik Elektro, Jurusan
Teknik Elektro,
Institut Teknologi Sepuluh Nopember (ITS) Surabaya
2009 : Teknik Elektro ITS Surabaya, Bidang Studi Elektronika
![Gambar 2 Sudut deteksi sensor Hamamatsu R2868 B. Sensor Panas TPA-81 [2]](https://thumb-ap.123doks.com/thumbv2/123dok/2377713.2201375/2.893.113.794.133.1129/gambar-sudut-deteksi-sensor-hamamatsu-sensor-panas-tpa.webp)
![Gambar 13 Konfigurasi Lapangan [5]](https://thumb-ap.123doks.com/thumbv2/123dok/2377713.2201375/7.893.103.803.127.1139/gambar-konfigurasi-lapangan.webp)
