I. Pendahuluan
Bahagian pengantar ini menyediakan latar belakang yang kukuh untuk kajian tentang penggunaan Sensor UVTron dalam robot pemadam api berasaskan mikrokontroler ATMEGA8535. Ia menerangkan konteks pembangunan robot untuk tujuan menyelamatkan nyawa dan harta benda daripada kebakaran. Pernyataan masalah yang jelas dikenal pasti, iaitu cabaran dalam mengaplikasikan Sensor UVTron untuk pengesanan api secara tepat dan berkesan. Batasan kajian ditekankan pada aspek-aspek tertentu seperti penggunaan bahasa pengaturcaraan C, simulasi dalam persekitaran terkawal dan skop pengesanan api yang terhad. Tujuan kajian yang spesifik dinyatakan, iaitu untuk membina dan menguji kebolehgunaan sensor tersebut dalam konteks robot pemadam api. Akhirnya, manfaat kajian ini dinyatakan dengan jelas sebagai sebuah sumbangan dalam bidang robotik dan pengurusan bencana, serta membuka peluang untuk penyelidikan lanjut.
1.1 Latar Belakang
Seksyen ini memperkenalkan perkembangan teknologi robotik dan perlunya penyelesaian automatik untuk kerja-kerja berbahaya seperti memadam kebakaran. Ia menekankan kepentingan sensor sebagai komponen penting dalam sistem robotik dan peranan Sensor UVTron dalam projek ini. Kajian latar belakang ini penting bagi pelajar untuk memahami keperluan dan cabaran dalam membangunkan sistem robotik yang efisien dan berkesan dalam menangani situasi kecemasan. Ia juga menggariskan pengetahuan asas tentang teknologi sensor dan aplikasi praktikal dalam konteks kejuruteraan.
1.2 Rumusan Masalah
Bahagian ini mengemukakan persoalan utama yang dikaji dalam tesis ini, iaitu kaedah terbaik menggunakan Sensor UVTron sebagai pendeteksi api dalam robot. Ini penting dalam konteks pedagogi kerana ia membantu pelajar menumpukan perhatian pada objektif pembelajaran yang spesifik. Rumusan masalah ini membentuk kerangka kerja untuk bahagian-bahagian seterusnya dalam tesis, membimbing pelajar ke arah memahami pendekatan penyelesaian yang digunakan.
1.3 Batasan Masalah
Seksyen ini menyatakan skop dan parameter-parameter yang akan dikaji dalam projek tersebut. Ia menggariskan batasan-batasan yang dikenakan untuk memudahkan penyelidikan, seperti saiz robot, jenis persekitaran ujian, dan fungsi-fungsi yang dijalankan oleh robot. Batasan ini penting bagi pelajar untuk memahami realiti penyelidikan dan memberi tumpuan kepada aspek-aspek yang boleh dicapai. Ia juga penting untuk mengurus jangkaan dan memastikan kebolehlaksanaan projek.
1.4 Tujuan dan Manfaat Penyelidikan
Bahagian ini menyatakan tujuan utama kajian, iaitu untuk membina prototaip robot pemadam api menggunakan Sensor UVTron dan menilai keefektifannya. Ia juga menyatakan manfaat kajian, iaitu untuk meningkatkan kecekapan dan keselamatan dalam kerja-kerja memadam kebakaran. Ini adalah penting dari sudut pedagogi kerana ia menghubungkan aspek praktikal projek dengan manfaat sosial yang lebih luas. Pelajar diajar untuk melihat projek mereka bukan sekadar sebagai tugasan akademik tetapi sebagai penyelesaian kepada masalah dunia nyata.
1.5 Metodologi Penyelidikan
Seksyen ini menerangkan kaedah dan pendekatan yang digunakan dalam kajian, termasuk kaedah literatur dan pemerhatian. Kaedah ini penting untuk kebolehpercayaan dan kebolehulangan kajian. Ia juga mengajar pelajar untuk memilih kaedah penyelidikan yang sesuai dan untuk membentangkan metodologi mereka secara telus dan sistematik. Penjelasan yang terperinci tentang metodologi membolehkan pembaca menilai kebolehpercayaan dan kesahihan dapatan kajian.
1.6 Sistematika Laporan
Bahagian ini memberikan gambaran keseluruhan struktur laporan tesis. Ia berfungsi sebagai peta jalan untuk pembaca dan membantu pelajar mengatur maklumat mereka secara logik dan sistematik. Ini juga menunjukkan pemahaman pelajar tentang struktur penulisan akademik dan bagaimana untuk menyusun maklumat secara koheren dan berstruktur.
II. Landasan Teori
Bahagian ini membentangkan asas teori yang berkaitan dengan projek, meliputi robotik, mikrokontroler ATMEGA8535, sistem pergerakan roda tank, pelbagai jenis sensor (Ping, UVTron, garis), LCD, motor servo dan DC, serta perisian pengaturcaraan dan muat turun. Ia menyediakan rangka kerja konseptual yang diperlukan untuk memahami projek dan membina prototaip. Pembentangan teori-teori ini penting untuk meningkatkan pemahaman pelajar tentang prinsip-prinsip asas yang menyokong projek mereka. Ia juga mendedahkan pelajar kepada pelbagai konsep dan teknologi berkaitan.
2.1 Robotik
Seksyen ini memberikan pengenalan kepada bidang robotik, menerangkan konsep asas dan jenis-jenis robot. Ia meneroka pendekatan praktikal dan teoritis dalam penyelidikan robotik, termasuk perbandingan antara robot mudah alih dan robot statik. Ia membantu pelajar memahami konteks lebih luas projek mereka dalam bidang robotik. Perbincangan ini amat berguna dalam membantu pelajar memahami bagaimana projek mereka berkait dengan perkembangan teknologi robotik semasa.
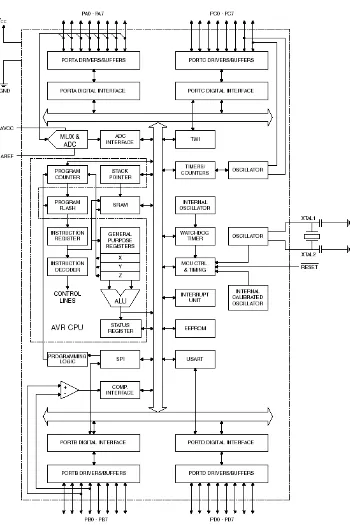
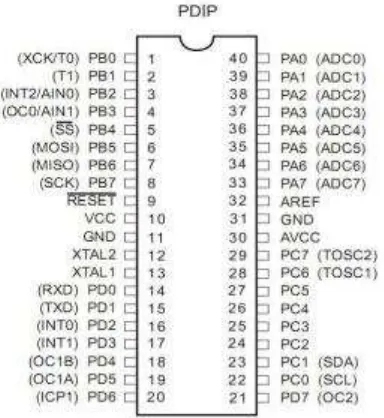
2.2 Mikrokontroler ATMega8535
Bahagian ini menerangkan secara terperinci tentang ciri-ciri dan fungsi mikrokontroler ATMEGA8535, termasuk seni bina RISC, saluran I/O, ADC, dan unit-unit lain. Ia merupakan asas kepada fungsi utama robot. Pelajar perlu memahami sepenuhnya mikrokontroler ini untuk mampu merancang dan melaksanakan atur cara bagi mengawal pergerakan dan sensor robot. Ia juga membolehkan pelajar menilai kebolehan dan batasan ATMEGA8535 dalam aplikasi ini.
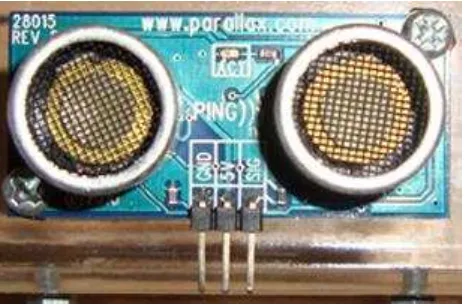
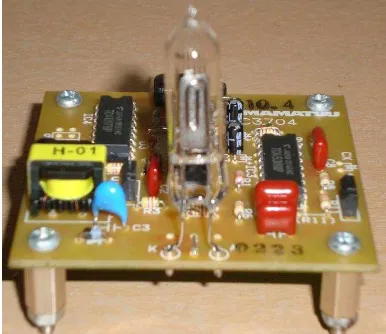
2.3 hingga 2.11 (Sistem Gerak Roda Tank, Sensor-sensor, LCD, Motor, Driver, Perisian)
Bahagian ini memberikan penerangan terperinci mengenai komponen-komponen lain yang digunakan dalam projek. Setiap seksyen mengandungi prinsip kerja, spesifikasi teknikal dan aplikasi setiap komponen. Ini penting bagi pelajar untuk memahami fungsi dan interaksi antara komponen-komponen dalam sistem. Ia juga memperkenalkan pelajar kepada pelbagai jenis sensor, motor, dan komponen elektronik lain yang digunakan dalam sistem robotik. Ini melengkapkan pelajar dengan pengetahuan praktikal yang diperlukan untuk merekabentuk dan membina sistem tersebut.
III. Rekabentuk dan Perancangan
Bahagian ini menerangkan proses rekabentuk dan perancangan sistem mekanikal dan elektronik robot, termasuk rekabentuk badan robot, sistem blok, dan rekabentuk perisian. Ia menggambarkan bagaimana semua komponen digabungkan untuk membentuk sistem yang berfungsi. Pelajar diajar untuk membuat keputusan rekabentuk yang tepat berdasarkan teori dan batasan projek. Ia juga mendedahkan pelajar kepada proses reka bentuk kejuruteraan yang sistematik.
3.1 Perancangan Sistem Mekanik
Seksyen ini menerangkan rekabentuk fizikal robot, termasuk dimensi dan bahan yang digunakan. Ia menunjukkan keupayaan pelajar untuk menterjemahkan reka bentuk konseptual kepada model fizikal. Pemilihan bahan dan dimensi penting untuk ketahanan dan fungsi robot. Pelajar didedahkan dengan aspek praktikal pembinaan robot.
3.2 Sistem Blok
Bahagian ini memberikan gambaran keseluruhan sistem elektronik robot, termasuk interkoneksi antara mikrokontroler, sensor, dan aktuator. Ia menunjukkan pemahaman pelajar tentang rekabentuk sistem dan interaksi antara komponen-komponen. Ini penting dalam memastikan kebolehfungsian dan kecekapan sistem. Ia juga membantu pelajar dalam mengenalpasti masalah-masalah yang mungkin timbul dalam proses pembinaan dan mengatasinya.
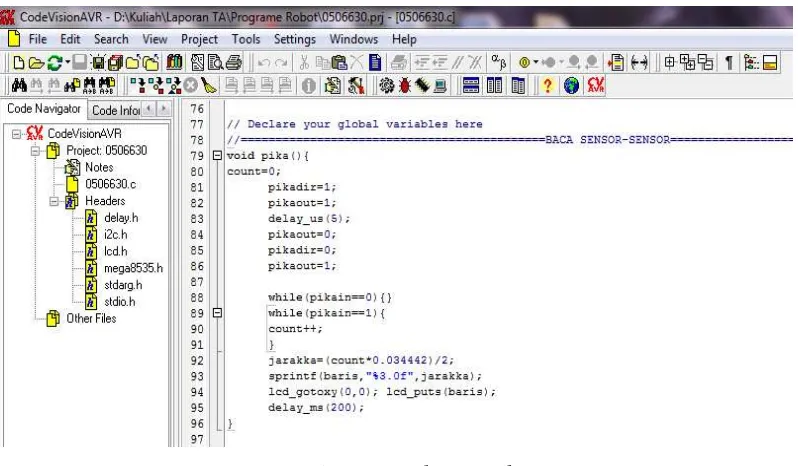
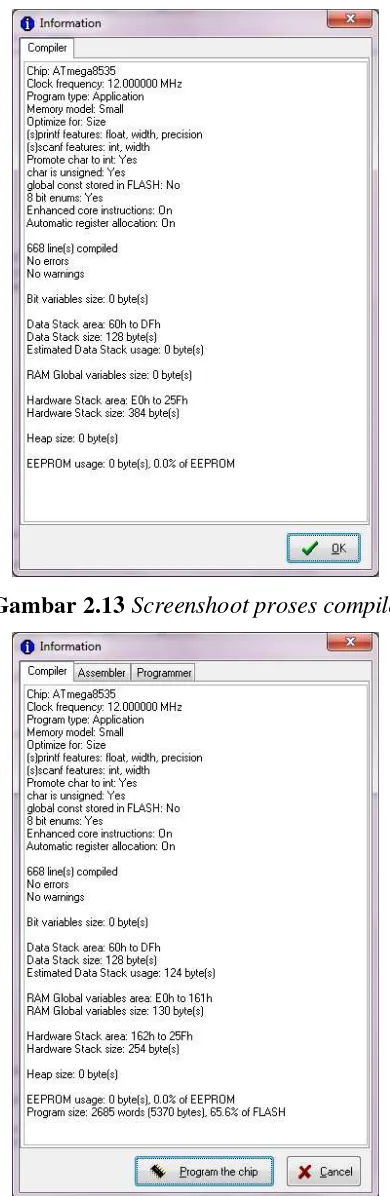
3.3 Perancangan Perisian
Seksyen ini menerangkan rekabentuk atur cara untuk mengawal robot, termasuk carta alir dan kod atur cara. Ia menunjukkan keupayaan pelajar untuk menterjemahkan keperluan projek kepada kod atur cara yang berfungsi. Ia juga mendedahkan pelajar kepada proses pengaturcaraan dan penyelesaian masalah dalam pembangunan sistem terbenam. Pembentangan carta alir yang jelas menunjukkan langkah-langkah penyelesaian masalah dan logik pengaturcaraan.
IV. Implementasi dan Analisa
Bahagian ini membentangkan hasil ujian dan analisis prestasi robot, termasuk ujian jarak dan sudut pengesanan api oleh Sensor UVTron, serta ujian sensor kompas. Ia menunjukkan keupayaan pelajar untuk menjalankan ujian secara sistematik dan menganalisis data yang diperolehi. Ia juga membolehkan pelajar menilai keberkesanan rekabentuk dan perancangan mereka.
4.1 hingga 4.7 (Ujian-ujian dan Analisa)
Seksyen ini membentangkan data empirikal yang diperolehi daripada ujian-ujian yang dijalankan. Ia termasuk jadual dan graf yang memaparkan prestasi sensor UVTron dan sensor kompas dalam pelbagai situasi. Analisa data ini menunjukkan keupayaan pelajar untuk mentafsir data, mengenalpasti trend, dan membuat kesimpulan berasaskan bukti empirikal. Ia juga membolehkan pelajar menilai kejayaan projek dan mengenalpasti potensi penambahbaikan.
V. Penutup
Bahagian penutup merumuskan dapatan kajian dan memberikan cadangan untuk penambahbaikan. Ia membentangkan kesimpulan utama berdasarkan analisis data dan membincangkan implikasi penemuan tersebut. Cadangan untuk penyelidikan dan pembangunan masa depan turut dibentangkan. Bahagian ini penting dalam mengukuhkan pemahaman pelajar tentang kepentingan pengurusan penyelidikan dan penyampaian dapatan kajian secara profesional.
5.1 Kesimpulan
Seksyen ini merumuskan dapatan utama kajian dan menjawab soalan penyelidikan yang telah dikemukakan. Ini menandakan penyelesaian kepada masalah yang dikenal pasti di bahagian pengenalan. Ia juga menekankan kejayaan dan batasan projek. Penutup ini amat penting untuk menunjukkan keupayaan pelajar membuat sintesis dan merumuskan maklumat.
5.2 Saranan
Seksyen ini memberikan cadangan untuk penyelidikan dan pembangunan masa hadapan. Ia membuka ruang untuk penyelidikan lebih mendalam dan pembangunan prototaip yang lebih canggih. Ia juga menunjukkan keupayaan pelajar untuk melihat projek mereka dalam konteks yang lebih luas dan untuk mencadangkan hala tuju penyelidikan masa hadapan. Ini membantu pelajar berfikir secara kritis dan mencadangkan arah tuju penyelidikan.