PERANCANGAN SISTEM TRACKING API MENGGUNAKAN FOTODIODA DAN SENSOR ULTRASONIK SEBAGAI PENDETEKSI
JARAK BERBASIS MIKROKONTROLER ATmega8535
SKRIPSI
DESY CHRISTIN NATALIA SINAGA 1008010041
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERANCANGAN SISTEM TRACKING API MENGGUNAKAN FOTODIODA DAN SENSOR ULTRASONIK SEBAGAI PENDETEKSI
JARAK BERBASIS MIKROKONTROLER ATmega8535
SKRIPSI
Diajukan untuk melengkapi salah satu persyaratan untuk mencapai gelar Sarjana Sains (S.Si)
DESY CHRISTIN NATALIA SINAGA 1008010041
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : Perancangan Sistem Tracking Api Menggunakan Fotodioda Dan Sensor Ultrasonik Sebagai Pendeteksi Jarak Berbasis Mikrokontroler Atmega8535 Kategori : Skripsi
Nama : Desy C N Sinaga
Nomor Induk Mahasiswa : 100801041
Program Studi : Sarjana (S1) Fisika Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disetujui di Medan, 26 Agustus 2014
Komisi Pembimbing :
Pembimbing I, Pembimbing II,
Dr. Kerista Tarigan, M.Eng. Sc Dr. Bisman P. M. Eng. Sc NIP :196002031986011001 NIP :195609181985031002
Disetujui Oleh
Departemen Fisika FMIPA USU Ketua,
PERNYATAAN
PERANCANGAN SISTEM TRACKING API MENGGUNAKAN FOTODIODA DAN SENSOR ULTRASONIK SEBAGAI PENDETEKSI
JARAK BERBASIS MIKROKONTROLER ATmega8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil karya saya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 26 Agustus 2014
PENGHARGAAN
Puji dan Syukur penulis panjatkan kepada TUHAN YESUS KRISTUS atas setiap pertolongan dan campur tanganNya sehingga penulis dapat menyelesaikan penyusunan skripsi ini dengan judul Perancangan Sistem Tracking Api Menggunakan Navigasi Sensor Ultrasonik Berbasis Mikrokontroler Atmega8535.
Dengan kerendahan hati penulis juga mengucapkan terima kasih dan penghargaan kepada:
1. Terima kasih kepada Bapak Dr. Kerista Tarigan, M.Eng.Sc dan Bapak Dr. Bisman P, M.Eng.Sc selaku dosen pembimbing yang telah bersedia meluangkan waktunya selama penyusunan skripsi ini.
2. Terima kasih kepada Bapak Dr. Marhaposan Situmorang selaku ketua jurusan Fisika, Drs. Syahrul Humaidi, M.Sc selaku sekretaris jurusan, Bapak dan Ibu Dosen Pengajar Fisika beserta staff pegawai Departemen Fisika.
3. Teristimewa untuk Ibuku tercinta H.Simbolon, terima kasih Ibu untuk segalanya yang telah Engkau lakukan dalam hidupku, aku mengasihi dan menyayangimu dan kiranya kasih karunia Tuhan senantiasa memberkatimu. 4. Terima kasih kepada Op. David, Tante Merli, Nanguda Cindy, Tulang dan
Nantulang yang selalu memotivasi penulis.
5. Terima kasih kepada adik-adikku tersayang Adriana, July Roma Itonya, Arga Jeremia yang selalu memberikan perhatian, dukungan dan doa kepada penulis. 6. Terima kasih untuk sahabat-sahabatku Sri Ita, Marisa, Layla, Rahelita, Ririn,
Julyana, Lasmini, Esna, Sarah, Dahniar, Usi, Lya, Mentari, Tere, Rika, Eka, Jejen, Cibun, Amin, Baginda, Lamhot, Faisal, Jekson, Baik, Gunawan, Riady, Edy, Wiharja, Rumianto, Juan, Ronal, Sahat, Desmar dan seluruh saudara-saudaraku Physic Inside kalian tak kan terlupakan.
Akhir kata penulis ucapkan terima kasih banyak kepada semua pihak yang turut membantu yang tidak dapat penulis sebutkan satu persatu. Semoga Tuhan senantiasa memberkati kita semua. Terima kasih.
Medan, 26 Agustus 2014
PERANCANGAN SISTEM TRACKING API MENGGUNAKAN FOTODIODA DAN SENSOR ULTRASONIK SEBAGAI PENDETEKSI
JARAK BERBASIS MIKROKONTROLER ATmega8535
ABSTRAK
Dalam kehidupan sehari-hari manusia membutuhkan keamanan dan kenyamanan dari lingkungan sekitarnya. Saat ini telah dikembangkan alat pengontrol keamanan yang penggunaannya ditujukan untuk memantau keamanan lingkungan sekitarnya secara full time seperti keamanan dari kebakaran. Dengan alasan inilah penulis membuat robot tracking api yang penggunaannya memonitoring ruangan sekitarnya secara fulltime. Prinsip kerja dari robot tracking api adalah mendeteksi adanya api didalam ruangan menggunakan fotodioda sebagai sensor api dan untuk mencari jejak api, robot akan berkeliling di sekitar ruangan dengan memakai sensor jarak ultrasonic SR-04 sebagai alat navigasinya dengan tujuan robot tidak menabrak halangan didepannya. Dengan mengaplikasikan semua fungsi sensor yang ada, diharapkan robot tracking api ini dapat menjadi alternatif baru untuk sistem pemantau kebakaran. Pada robot tracking api persentase ralat rata-rata sensor jarak ultrasonic SR-04 2,13% dalam membaca jarak dan fotodioda sebagai sensor api memenuhi karakteristiknya dengan kemampuan pembacaan sudut dimulai dari 0° hingga 30° fotodioda mampu mengenali titik api dan robot tracking langsung memadamkan api.
FIRE TRACKING SYSTEM DESIGN USING PHOTODIODE AND ULTRASONIC SENSOR AS DISTANCE DETECTION WITH
MICROCONTROLLER ATmega8535
ABSTRACT
People need the security and comfort of the surrounding environment in daily life. Currently, use of security control was developed to monitoring fire as a full timer monitor. For this reason, the authors make a fire robot tracking use as a fulltimer monitor. The principle robot tracking is to detect fire in the room using photodiode as sensor to track the fire and robot tracking will be touring around the room using SR-04 ultrasonic as a navigation tool, so robot does not hit the obstacle in front of him. With this application is expected to be one of the new alternative solution for fire monitoring system. In this project produces percentage error of SR-04 ultrasonic 2.13% and photodiode such as a fire sensors get his characteristics with ability to reading the angles from 0° to 30°, photodiode is able to identify fire and robot tracking directly extinguish the fire.
DAFTAR ISI
2.2.3 Karakteristik Fotodioda Dan Aplikasinya Mengukur Intensitas Cahaya 8
2.3 Mikrokontroller Atmega 8535 8
2.3.1Fitur Atmega8535 9
2.3.5 Organisasi Memori Atmega8535 14
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
Gambar 2.1 Prinsip Kerja Gelombang Ultrasonik…... 5
Gambar 2.2 Sensor Jarak Ultrasonic SR-04... 6
Gambar 2.3 Instalasi Sensor Jarak SR-04... …… 6
Gambar 2.4 Fotodioda...…... 7
Gambar 2.5 Konfigurasi PIN ATMega8535... 10
Gambar 2.6 Organisasi Memori ATMega8535... 14
Gambar 2.7 Memori Data………... 15
Gambar 2.8 Bentuk LCD (Liquid Cristal Display)... 17
Gambar 3.1 Diagram Blok Rangkaian... …… 21
Gambar 3.2 Rangkaian Mikrokontroler ATMega 8535... 23
Gambar 3.3 Rangkaian Driver Motor DC... 25
Gambar 3.4 Rangkaian Skematik Dari LCD Ke Mikrokontroler... 28
Gambar 3.5 Rangkaian Sensor Jarak SR-04………... 29
Gambar 3.6 Rangkaian Penerima Sinar Inframerah Dari Api... …… 30
Gambar 3.7 Rangkaian Spreyer………... 31
Gambar 3.8 Pemilihan Tipe File………... 32
Gambar 3.9 Dialog Konfirmasi Tentang Penggunaan CodeWizarardAVR………... 32
Gambar 3.10 Pemilihan Tipe Mikrokontroler Dan Kristal……... 33
Gambar 3.11 Setting PORT A……... …… 33
Gambar 3.12 Setting Penempatan LCD Pada PORT C... 34
Gambar 3.13 Generate, Save Dan Exit... 34
Gambar 3.14 Menu Bluetooth………... 35
Gambar 3.15 Perangkat Bluetooth Yang Terdeteksi Komputer……... 35
Gambar 3.16 Aplikasi Penukar Data………... 36
Gambar 3.17 Kotak Dialog Pengaturan COM PORT ………... 36
Gambar 3.18 Tampilan Terminal Pengirim Data………... 37
Gambar 3.19 Diagram Alur Sistem………... 39
Gambar 4.1. Range Pembacaan Sensor Api Fotodioda Terhadap Detaksi Jarak Dan Deteksi Sudut...... 41
DAFTAR TABEL
Nomor Judul Halaman
Tabel
Tabel 2.1. konfigurasi PIN LCD...... 18 Tabel 3.1. Peta Memori LCD……….. 28 Tabel 4.1 Hasil Pengujian Deteksi Sudut Dan Deteksi Jarak
Sensor Api..... 40 Tabel 4.2. Hasil Pengujian Sensor Jarak SR-04 Bagian Kanan
dengan Media Pantul Dinding………... 42 Tabel 4.3. Hasil Pengujian Sensor Jarak SR-04 Bagian Kanan
Dengan Media Pantul Sterofom…………..……… 43 Tabel 4.4. Hasil Pengujian Sensor Jarak SR-04 Bagian Kanan
Dengan Media Pantul Triplex..………... 44 Tabel 4.5. Hasil Pengujian Sensor Jarak SR-04 Bagian Depan
Dengan Media Pantul Dinding……… 45 Tabel 4.6. Hasil Pengujian Sensor Jarak SR-04 Bagian Depan
Dengan Media Pantul Sterofom …..…………... 46 Tabel 4.7. Hasil Pengujian Sensor Jarak SR-04 Bagian Depan
Dengan Media Pantul Triplex ……… 47 Tabel 4.8 Hasil Pengujian Sensor Jarak SR-04 Bagian Kiri
Dengan Media Pantul Dinding……… 48 Tabel 4.9 Hasil Pengujian Sensor Jarak SR-04 Bagian Kiri
Dengan Media Pantul Sterofom ……… 49 Tabel 4.10. Hasil Pengujian Sensor Jarak SR-04 Bagian Kiri
Dengan Media Pantul Triplex ……….. 50 Tabel 4.11. %Ralat Rata-Rata Hasil Pengujian Sensor Jarak SR-04
PERANCANGAN SISTEM TRACKING API MENGGUNAKAN FOTODIODA DAN SENSOR ULTRASONIK SEBAGAI PENDETEKSI
JARAK BERBASIS MIKROKONTROLER ATmega8535
ABSTRAK
Dalam kehidupan sehari-hari manusia membutuhkan keamanan dan kenyamanan dari lingkungan sekitarnya. Saat ini telah dikembangkan alat pengontrol keamanan yang penggunaannya ditujukan untuk memantau keamanan lingkungan sekitarnya secara full time seperti keamanan dari kebakaran. Dengan alasan inilah penulis membuat robot tracking api yang penggunaannya memonitoring ruangan sekitarnya secara fulltime. Prinsip kerja dari robot tracking api adalah mendeteksi adanya api didalam ruangan menggunakan fotodioda sebagai sensor api dan untuk mencari jejak api, robot akan berkeliling di sekitar ruangan dengan memakai sensor jarak ultrasonic SR-04 sebagai alat navigasinya dengan tujuan robot tidak menabrak halangan didepannya. Dengan mengaplikasikan semua fungsi sensor yang ada, diharapkan robot tracking api ini dapat menjadi alternatif baru untuk sistem pemantau kebakaran. Pada robot tracking api persentase ralat rata-rata sensor jarak ultrasonic SR-04 2,13% dalam membaca jarak dan fotodioda sebagai sensor api memenuhi karakteristiknya dengan kemampuan pembacaan sudut dimulai dari 0° hingga 30° fotodioda mampu mengenali titik api dan robot tracking langsung memadamkan api.
FIRE TRACKING SYSTEM DESIGN USING PHOTODIODE AND ULTRASONIC SENSOR AS DISTANCE DETECTION WITH
MICROCONTROLLER ATmega8535
ABSTRACT
People need the security and comfort of the surrounding environment in daily life. Currently, use of security control was developed to monitoring fire as a full timer monitor. For this reason, the authors make a fire robot tracking use as a fulltimer monitor. The principle robot tracking is to detect fire in the room using photodiode as sensor to track the fire and robot tracking will be touring around the room using SR-04 ultrasonic as a navigation tool, so robot does not hit the obstacle in front of him. With this application is expected to be one of the new alternative solution for fire monitoring system. In this project produces percentage error of SR-04 ultrasonic 2.13% and photodiode such as a fire sensors get his characteristics with ability to reading the angles from 0° to 30°, photodiode is able to identify fire and robot tracking directly extinguish the fire.
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi pada dewasa ini mendorong manusia untuk terus melakukan inovasi–inovasi baru di berbagai bidang. Pada dasarnya semakin berkembangnya ilmu pengetahuan dan teknologi maka semakin berkembang juga pola dan gaya hidup manusianya.
Perkembangan teknologi salah satunya berpengaruh pada bidang keamanan, hal ini terlihat dari kenyataan yang ada bahwa manusia membutuhkan keamanan dan kenyamanan dari lingkungan sekitarnya seperti keamanan dari kebakaran. Saat ini kita telah dapat menikmati begitu banyak alat pengontrol keamanan yang penggunaannya ditujukan untuk memantau keamanan lingkungan sekitarnya secara full time. Dengan pengembangan aplikasi dari sensor dan software yang ada maka penulis mencoba membuat suatu alat yang mampu menjadi pemantau keadaan rumah secara full time dari kebakaran.
Pengembangan fotodioda sebagai pencari nyala api untuk dipadamkan dan juga sensor ultrasonik sebagai sensor navigasi yang akan mendeteksi jarak api. Sebagaimana kita sensor ultrasonik bekerja berdasarkan prinsip pemantulan gelombang suara, dimana sensor ini menghasilkan gelombang suara yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar penginderaannya.
Atas dasar pemikiran tersebut maka penulis mencoba membuat sebuah alat yang mampu menyatukan fungsi kerja keduanya dengan demikian diharapkan alat yang akan dirancang oleh penulis dapat lebih menyempurnakan sistem pemantau kebakaran yang telah ada sebelumnya, maka dibuatlah tugas akhir dengan judul
1.2 Tujuan Penelitian
Tujuan dari pembuatan tugas akhir ini adalah :
1. Merancang suatu alat pencari jejak api di dalam suatu ruangan.
2. Menggunakan mikrokontroller ATMega 8535 sebagai pengendali system pencari jejak api.
3. Menggunakan sensor ultrasonik sebagai pendeteksi jarak dan fotodioda sebagai sensor api.
1.3 Batasan Masalah
Dalam pembuatan Tugas Akhir ini penulis memberikan pokok pembahasan yang mencangkup beberapa hal, diantaranya sebagai berikut :
1. Pembuatan alat ini hanya terfokus pada pencarian jejak api dengan sumber api dari nyala lilin dengan jarak sumber api dari alat sekitar ± 30 cm
2. Mikrokontroller ATMega 8535 sebagai otak dari sistem secara keseluruhan memberi logika perintah untuk dilakukan oleh sensor ultrasonic sebagai pendeteksi jarak dan fotodioda sebagai sensor api.
3. Pemrograman Mikrokontroller ATMega 8535 menggunakan bahasa pemprogaman C untuk dapat mengarahkan pencari jejak api menggunakan code vision AVR.
4. Sensor ultrasonik sebagai pendeteksi jarak dan penuntun gerakan pada robot pemadam api.
1.4 Manfaat Penelitian
Manfaat yang diharapkan dengan adanya alat tersebut adalah:
1.5 Sistematika Penulisan
Untuk memberi gambaran yang jelas tentang susunan materi yang dibahas dalam Laporan Tugas Akhir ini, sistematika yang digunakan adalah sebagai berikut : BAB I PENDAHULUAN
Bab ini membahas mengenai Latar Belakang, Tujuan Penelitian, Batasan Masalah, Manfaat Penelitian dan Sistematika Penulisan
BAB II LANDASAN TEORI
Pada bab ini akan dibahas mengenai dasar teori dari fotodioda sebagai sensor api, sensor jarak ultrasonic SR-04 sebagai sensor navigasi, mikrokontroller ATMega 8535, motor DC, LCD, Bluetooth dan code vision AVR C compiler
BAB III PERANCANGAN SISTEM
Berisi tentang tahap-tahap perancangan sistem, sehingga diperoleh suatu diagram blok yang merupakan gambaran dari keseluruhan system sehingga dapat menjalankan fungsi yang kita inginkan.
BAB IV PENGUJIAN DAN ANALISA SISTEM
Dalam bab ini akan membahas tentang uji coba rangkaian dan alat apakah rangkaian telah berjalan sesuai dengan yang direncanakan, hasil pengukuran, hasil pengujian dan analisa hasil pengujian dan pengukuran dengan teori–teori yang ada.
BAB V KESIMPULAN DAN SARAN
Berisi kesimpulan dan saran yang berkaitan dengan seluruh proses perancangan dan pembuatan tugas akhir ini serta penyelesaian laporannya.
DAFTAR PUSTAKA
BAB 2
TINJAUAN PUSTAKA
2.1 Sensor Ultrasonik
Dari semua gelombang mekanik yang ada di alam, yang terpenting dalam kehidupan sehari-hari adalah gelombang longitudional. Gelombang longitudional dalam sebuah medium, biasanya udara, dinamakan gelombang bunyi. Alasannya adalah bahwa telinga manusia sangat peka dan dapat mendeteksi gelombang bunyi walau intensitasnya sangat rendah.
Defenisi paling umum dari bunyi adalah bahwa bunyi adalah sebuah gelombang longitudional dalam suatu medium. Gelombang bunyi yang paling sederhana adalah gelombang sunisoidal yang mempunyai frekuensi, amplitude, dan panjang gelombang tertentu. Telinga manusia peka terhadap gelombang dalam jangkauan frekuensi sekitar 20 sampai 20000 Hz, yang dinamakan jangkauan yang dapat didengar atau audible range, tetapi kita juga menggunakan istilah bunyi untuk gelombang serupa dengan frekuensi diatas (ultasonik) dan di bawah (infrasonic) jangkauan pendengaran manusia. (Young, 2001)
Gelombang dengan getaran frekuensi di atas jangkauan pendengaran telinga normal disebut sebagai ultrasonik dengan frekuensi lebih dari 20000 Hz. Gelombang ultrasonik dengan amplitudo yang tinggi kadang-kadang disebut sebagai sonic, dengan frekuensi sekitar 500 x 106 hingga 1 x 106 Hz. Banyak fenomena terutama yang terjadi di rentang frekuensi yang lebih tinggi yang diamati yang tidak dapat dijelaskan dan memenuhi teori klasik dan fakta ultrasonik. Sifat unik ultrasonik telah diterapkan untuk industri, signaling, obat-obatan dan berbagai bidang lainnya. (Carlin, 1960)
Struktur atom dari kristal piezoelectric akan berkontraksi mengembang atau menyusut terhadap polaritas tegangan yang diberikan dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara.
Pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu dan pantulan gelombang ultrasonik akan diterima kembali oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama.
Gambar 2.1 Prinsip kerja sensor ultrasonik
Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensoring dilakukan menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian pengirim sampai diterima oleh rangkaian penerima, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara. (Budiharjo,2007)
2.1.1 Sensor Jarak Ultrasonik SR-04
Gambar 2.2 Sensor jarak ultrassonik SR-04
Sensor SR-04 mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik kemudian mendeteksi pantulannya. Sensor SR-04 memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroller pengendali.
Spesifikasi sensor ultrasonik SR-04 : 1 Kisaran pengukuran 2 cm – 4 m 2. Dimensi 45mm x 20mm x 15mm 3. Sudut pancaran 15°.(Budiharjo,2007)
2.1.2 Instalasi Sensor Ultrasonic SR-04
Sensor ultrasonic SR-04 akan bekerja jika mendapat suplay tegangan sebesar 5 V DC. Dimana tegangan 5 V DC dihubungkan dengan konektor Vcc dan ground pada sensor. Untuk konektor SIG dapat dihubungkan dengan mikrokontroler. Konektor SIG adalah sebagai control sensor dalam pendeteksian objek sekaligus pembacaan jarak objek dengan sensor. (Budiharjo,2007)
2.2 FOTODIODA
Fotodioda adalah suatu jenis dioda yang resistansinya berubah-ubah bila cahaya yang jatuh pada dioda berubahubah intensitasnya. Dalam gelap nilai tahanannya sangat besar hingga praktis tidak ada arus yang mengalir. Semakin kuat cahaya yang jatuh pada dioda maka makin kecil nilai tahanannya, sehingga arus yang mengalir semakin besar.
Dioda foto adalah jenis dengan diode biasa, komponen arus listrik. Cahaya yang dapat dideteksi oleh diode foto ini mulai dari cahaya 2001)
2.2.1 Bahan Dari Fotodioda
Fotodioda terbuat dari bahan semikonduktor yaitu silicon (Si), atau Galium Arsenida, dan yang lain adalah Insb, InAs, PbSe. Material-material ini meyerap cahaya dengan karakteristik panjang gelombang mencangkup: 2500 Å – 11000 Å untuk silicon, 8000 Å – 20,000 Å untuk GaAs. (Held.G,2008)
Gambar 2.4 Fotodioda
2.2.2 Prinsip Kerja Fotodioda
semikonduktor yang kehilangan elektron. Arah Arus yang melalui sebuah semikonduktor adalah kebalikan dengan gerak muatan pembawa. Cara tersebut didalam sebuah photodiode digunakan untuk mengumpulkan photon menyebabkan pembawa muatan terbentuk di bagian-bagian elektroda.
Saat photodiode terkena cahaya, maka akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil. Saat fotodiode tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat diasumsikan tak hingga. (Knoll. F. G, 2010)
2.2.3 Karakteristik Fotodioda Dan Aplikasinya Mengukur Intensitas Cahaya
Fotodioda berbeda dengan dioda biasa. Jika fotodioda persambungan p-n bertegangan balik disinari, maka arus akan berubah secara linier dengan kenaikan fluks cahaya yang dikenakan pada persambungan tersebut. Berdasarkan hal tersebut dapat dibuat alat untuk mendeteksi intensitas cahaya dengan memanfaatkan karakteristik fotodioda sebagai salah satu alternatif pendeteksi intensitas cahaya.
Fotodioda dapat berfungsi sebagai sensor untuk mengukur intensitas cahaya, dimana semakin besar intensitas cahaya (ditunjukkan cahaya api) yang mengenainya maka arus yang dihasilkan fotodioda juga akan semakin besar. (James F. Cox, 2001)
2.3 Mikrokontroller ATmega 8535
Mikrokontroler merupakan system computer yang seluruh atau sebagian esar elemennya dikemas dalam satu chip IC, sehingga sering juga disebut dengan
Mikrokontroler dapat dianalogikan dengan sebuah system computer yang dikemas dalam sebuah chip. Artinya bahwa di daam sebuah IC mikrokontroler sebenarnya sudah terdapat kebutuhan minimal agar mikroprosesor dapat bekerja, yaitu meliputi mikroprosesor, ROM, RAM, I/O dan clock seperti halnya yang dimiliki oleh sebuah computer PC. ATmega8535 memiliki fitur yang cukup lengkap, mulai dari kapasitas memori program dan memori data yang cukup besar, interupsi, timer/counter, PWM, USART, TWI, analog comparator, EEPROM internal dan juga ADC internal semuanya ada di dalam ATmega8535. (Bejo, 2008)
Mikrokontroler jenis MCS memiliki kecepatan frekuensi kerja 1/12 kali frekuensi osilator yang digunakan sedangkan pada kecepatan frekuensi kerja AVR sama dengan kecepatan frekuensi kerja osiator yang digunakan. Jadi apabia menggunakan frekuensi osilator yang sama, maka AVR memiliki kecepatan kerja 12 kali lebih cepat dibandingkan dengan MCS. (Setiawan, 2011)
Kemampuan eksekusi yang lebih tinggi menjadi alasan bagi banyak orang untuk beralih dan lebih memilih menggunakan mikrokontroler jenis AVR ketimbang mikrokontroler pendahulunya yaitu keluarga MCS-51. Mikrokontroller ATmega8535 adalah mikrokontroller 8 bit buatan ATMEL dengan 8 KByte System Programable Flash dengan teknologi memori tak sumirna (nonvolatile), kepadatan tinggi, dan kompatibel dengan pin out dan set instruksi standar industri MCS51 INTEL. (Bejo, 2008)
2.3.1Fitur ATMEGA8535
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega 8535.
1. 130 macam intruksi yang hampir semuanya dieksekusi dalam satu siklus clock 2. 32 x 8-bit register serbaguna
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz
4. 8 Kbyte Flash Memori, yang memiliki fasilitas In System Programming 5. 512 Byte internal EEPROM
7. Programming Lock, fasilitas untuk mengamankan kode program 8. 2 buah timer/counter 8-bit dan 1 buah timer/counter 16-bit 9. 4 channel output PWM
10.8 channel ADC 10-bit 11.Serial USART
12.Master/Slave SPI serial interface 13.Serial TWI atau 12C
14.On-Chip Analog Comparator
Gambar 2.5 Konfigurasi pin ATmega8535
2.3.2Deskripsi Pin-Pin Pada Mikrokontroler ATMega8535
2.3.2.1 Port B
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit Port B juga dapat difungsikan sebagai berikut :
1. PB7 : SCK = SPI bus serial clock
4. PB4 : SS = SPI slave select input
5. PB3 : AIN1 = analog comparator negative input 6. PB2 : AIN0 = analog comparator positive input 7. PB1 : T1 = timer/counter 0 external counter input 8. PB0 : T0 = timer/counter 0 external counter input
2.3.2.2 RESET (Reset input)
RESET (RST) pada pin 9 merupakan pin reset yang akan bekerja bila diberi pulsa rendah selama minimal 1.5 us.
2.3.2.3 VCC
VCC merupakan pin yang berfungsi sebagai catu daya digital.
2.3.2.4 GND
Ground untuk catu daya digital.
2.3.2.5 XTAL2
Merupakan output dari penguat osilator pembalik.
2.3.2.6 XTAL1
2.3.2.7 Port D
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit Port D juga dapat difungsikan secara individu sebagai berikut :
1. PD7 : OC2 (Timer/Counter2 output compare match output) 2. PD6 : ICP (Timer/Counter1 input capture pin)
3. PD5 : OC1A (Timer/Counter1 output compareA match output) 4. PD4 : OC1B (Timer/Counter1 output compare B match output) 5. PD3 : INT1 ( external interrupt 1 input )
6. PD2 : INT0 ( external interrupt 0 input ) 7. PD1 : TDX (UART output line)
8. PD0 : RDX (UART input line)
2.3.2.8Port C
Merupakan Port I/O 8-bit dua arah dengan resistor pull-up internal. Selain sebagai Port I/O 8-bit 4 bit Port C juga dapat difungsikan secara individual sebagai berikut:
1. PC7 : TOSC2 (timer oscillator 2) 2. PC6 : TOSC1 (timer oscillator 1) 3. PC1: SDA ( serial data input/output) 4. PC0 : SCL (serial clock)
2.3.2.9AVCC
2.3.2.10 GND
Ground untuk catu daya analog.
2.3.2.11 AREF
AREF adalah tegangan referensi analog untuk ADC.
2.3.2.12 Port A
Merupakan Port I/O 8-bit dua arah dengan resistansi pull-up internal. Selain sebagai Port I/O 8-bit juga dapat difungsikan sebagai masukan 8 channel ADC. (Bejo, 2008)
2.3.4 Arsitektur ATmega8535
Mikrokontroler ATmega8535 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode pemrogram dan memori untuk data sehingga dapat memaksimalkan unjuk kerja dan paralelisme. Intruksi-intruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu intruksi dikerjakan intruksi berikutnya diambil (pre-fetched) dari memori program. Konsep ilmiah yang memungkinkan instruksi-instruksi dapat dieksekusi dalam setiap satu sikus clock.
R27), register Y (gabungan R28 dan R29), dan register Z (gabungan R30 dan R31).
Hampir semua intruksi AVR memiliki format 16-bit (word). Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit. Selain register serbaguna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O sebesar 64 Byte. ATmega8535 mempunyai 32 general purpose register (R0..R31) yang terhubung langsung dengan Arithmetic Logic Unit (ALU), sehingga register dapat diakses dan dieksekusi hanya dalam waktu satu siklus clock. (Bejo, 2008)
2.3.5 Organisasi Memori ATMega8535
Mikrokontroler ATmega 8535 memiliki 3 jenis memori yaitu memori program, memori data dan memori EEPROM.
Gambar 2.6 Organisasi memori ATMega8535
2.3.5.1 Memori Program
semua kapasitas memori program di atas dapat digunakan untuk program aplikasi. Tetapi jika kita menggunakan fitur Boot Loader Flash maka pembagian ukuran kedua bagian ini ditentukan oleh BOOTSZ fuse. (Bejo, 2008)
2.3.5.2 Memori Data
Memori data pada ATMega 8535 terdiri atas memori data internal dan eksternal kapasitas dari mSRam internal adalah sebesar 512 Kbytes. Ini menempati ruang alamat setelah 32 lokasi register serbaguna. alamat dan setelah 64 register I/O. Jika SRAM eksternal digunakan, ini akan mengiukuti besar SRAM eksternal sampai dengan maksimum 64K terganung ukuran SRAM eksternal.
Operasi SRAM eksternal dimungkinkan oleh setting bit SRE di register MCUCR. Mode pengalamatan untuk mengakses memori data meliputi pengalamatan langsung (Direct Addressing), pengalamatan tak langsung (Indirect Addressing), Indirect dengan Pre-Decrement, Indirect dengan Post-Decrement, dan Indirect dengan Displacement. (www.ATMEL.com.Data sheet ATMega 8535)
2.3.5.3 Memori EEPROM
ATmega 8535 memiiki memori EEPROM SEBESAR 512 Byte yang terpisah dari memori program maupun memori data. Memori EEPROM ini hanya dapat diakses dengan menggunakan register-register I/O yaitu register EEPROM Addres (EEARH-EEARL), register EEPROM Data (EEDR) dan register EEPROM Contro (EECR). Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal sehingga waktu eksekusinya relative lebih lama bila dibandingkan dengan data dari SRAM. (Bejo, 2008)
2.3.6 Status Register (SREG)
Register SREG digunakan untuk menyimpan informasi dari hasil operasi aritmatika yang terakhir. Informasi-informasi dari register SREG dapat digunakan untuk mengubah alur program yang sedang dijalankan dengan menggunakan instruksi percabangan. Data SREG akan selalu berubah setiap instruksi atau operasi pada ALU dan datanya tidak otomatis tersimpan apabila terjadi instruksi percabangan baik karena interupsi maupun lompatan. (Bejo, 2008)
2.4 Bahasa Pemrograman ATMega8535
Dalam proses merancang sistem mikrokontroler diperlukan adanya software yang berupa software compiler dan software downloader/programmer.
2.4.1 CODEVISION AVR
mikrokontroler AVR sudah dikuasai, maka akan dengan mudah menguasai pemrograman keseluruhan mikrokontroler jenis mikrokontroler AVR. Namun bahasa assembler relatif lebih sulit dipelajari dari pada bahasa C.
CodeVision AVR merupakan salah satu software compiler yang khusus digunakan untuk mikrokontroler keluarga AVR. Meskipun CodeVisionAVR termasuk software komersil, namun kita dapat menggunakannya dengan mudah karena terdapat versi evaluasi.
Salah satu kelebihan CodeVisionAVR adalah tersedianya fasilitas untuk mendownload program ke mikrokontroler yang telah terintegrasi sehingga dengan demikian CodeVisionAVR ini selain dapat berfungsi sebagai software compiler juga dapat berfungsi sebagai software programmer/downloader. Jadi kita dapat melakukan proses download program yang telah dikompile dengan menggunakan software CodeVisionAVR. (Bejo, 2008)
2.5 LCD 16x2
LCD merupakan salah satu perangkat penampil yang sekarang ini banyak digunakan menggantikan fungsi dari penampil CRT (Cathode Ray Tube). LCD memanfaatkan silicon atau gallium dalam bentuk kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi pexel yang dibagi dalam bentuk baris dan kolom.
Gambar 2.8 Bentuk LCD (Liquid Cristal Display)
dengan mudah dibawah terang sinar matahari. LCD ini menampilkan data dengan 2 baris tampilan pada display.
Operasi dasar dari LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, instruksi membaca kondisi sibuk dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5x7 dot matrik. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum pembacaan 80x8 bit tampilan data. Perintah utama LCD adalah Display Clear, Cursor Home, Display ON/OFF, Display
Character Blink, Cursor Shift, dan Display Shift.
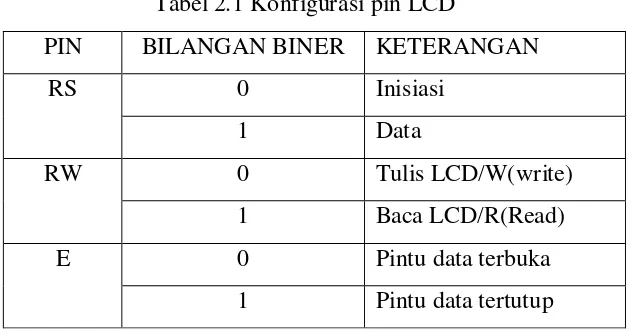
Tabel 2.1 Konfigurasi pin LCD
PIN BILANGAN BINER KETERANGAN
RS 0 Inisiasi
1 Data
RW 0 Tulis LCD/W(write)
1 Baca LCD/R(Read)
E 0 Pintu data terbuka
1 Pintu data tertutup
Lapisan film yang berisi Kristal cair diletakkan di antara dua lempeng kaca yang telah ditanami elektroda logam transparan. Saat tegangan dicatukan pada beberapa pasang elektroda, molekul-molekul kristal cair akan menyusun diri agar cahaya yang menganainya akan dipantulkan atau diserap. Dari hasil pantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai bagian yang diaktifkan. (Setiawan, 2011)
2.6 Bluetooth
mampu menyediakan layanan komunikasi data dan suara secara real-time antara host-host bluetooth dengan jarak jangkauan layanan yang terbatas. Bluetooth sendiri dapat berupa card yang bentuk dan fungsinya hampir sama dengan card yang digunakan untuk wireless local area network (WLAN) dimana menggunakan frekuensi radio standar IEEE 802.11, hanya saja pada bluetooth mempunyai jangkauan jarak layanan yang lebih pendek dan kemampuan transfer data yang lebih rendah.
Pada dasarnya bluetooth diciptakan bukan hanya menggantikan atau menghilangkan penggunaan kabel didalam melakukan pertukaran informasi, tetapi juga mampu menawarkan fitur yang baik untuk teknologi mobile wireless dengan biaya yang relatif rendah, konsumsi daya yang rendah, interoperability yang menjanjikan, mudah dalam pengoperasian dan mampu menyediakan layanan yang bermacam-macam.
Bluetooth menggunakan salah satu dari dua jenis frekuensi Spread Specturm Radio yang digunakan untuk kebutuhan wireless. Jenis frekuensi yang digunakan adalah Frequency Hopping Spread Spectrum (FHSS) dan Direct
Sequence Spread Spectrum (DSSS) digunakan oleh IEEE802.11xxx. Transceiver yang digunakan oleh Bluetooth bekerja pada frekuensi 2,4 GHz unlicensed ISM
(Industrial, Scientific, and Medical). (e-book dari http://wireless.klings.org)
2.7 Motor DC
Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik. Robot yang memiliki kemampuan navigasi dan manipulasi secara relative memiliki konstruksi mekanik yang lebih rumit dibandingkan dengan yang berkemampuan navigasi saja yang hanya memiliki roda penggerak.
tengah motor memiliki jumlah kutub yang ganjil dan pada setiap kutubnya terdapat lilitan. Lilitan ini terhubung ke area kontak yang disebut komutator.
Sikat (brushes) yang terhubung ke kutub positif dan negatif motor memberikan daya ke lilitan sedemikian rupa sehingga kutub yang satu akan ditolak oleh magnet permanen yang berada di dekatnya, sedangkan lilitan lain akan ditarik ke magnet permanen yang lain sehingga menyebabkan jangkar berputar. Ketika jangkar berputar, komutator mengubah lilitan yang mendapat pengaruh polaritas medan magnet sehingga jangkar akan terus berputar selama kutub positif dan negatif motor diberi daya.
Hal utama yang perlu diperhatikan dalam disain mekanik robot adalah perhitungan kebutuhan torsi untuk menggerakkan roda. Motor sebagai penggerak utama yang paling sering dipakai pada umumnya akan bekerja optimal pada putaran yang relative tinggi yang hal ini tidak sesuai bila porosnya dihubungkan langsung ke roda. Sebab kebanyakan gerakan yang digunakan pada sisi badan robot adalah relative pelan namun bertenaga. Untuk itu diperlukan cara-cara transmisi gaya motor secara tepat. Salah satu metode yang sering digunakan adalah menggunakan system gear.
BAB 3
RANCANGAN SISTEM
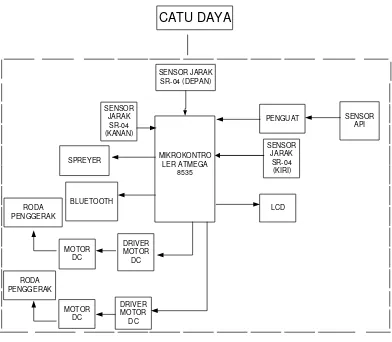
3.1 Diagram Blok Rangkaian
Adapun diagram blok dari sistem yang dirancang adalah seperti yang diperlihatkan pada gambar 3.1. berikut ini:
CATU DAYA
menghindari halangan yang menghalangi laju robot sehingga robot tidak menabrak.
Prinsipnya yakni, fotodioda sebagai sensor api berfungsi sebagai pendeteksi api. Transceiver sensor ultrasonik depan, samping kiri dan samping kanan memancarkan gelombang ultrasonik untuk mendeteksi adanya halangan yang dapat menghambat laju robot, gelombang ultrasonik tersebut kemudian ditangkap oleh bagian receiver pada sensor ultrasonik, setelah receiver pada sensor ultrasonik menangkap pancaran gelombang yang mendeteksi adanya halangan selanjutnya semua sensor ultrasonik baik samping kiri dan samping kanan memberikan data kepada mikrokontroller untuk memerintahkan logika apa dan apa yang harus dilakukan oleh robot apakah belok kiri, jalan lurus atau belok kanan.
Driver motor DC berfungsi sebagai driver untuk mengendalikan perputaran motor DC yang akan mengendalikan putaran roda. Spreyer sebagai penyemprot air untuk memadamkan api. Display LCD akan menampilkan jarak yang diukur oleh sensor ultrasonik. Bluetooth akan mengirimkan jarak halangan yang dibaca sensor ultrasonik ke komputer/PC. Mikrokontroller ATMEGA8535 berfungsi sebagai otak dari system, yang akan mengendalikan proses kerja alat.
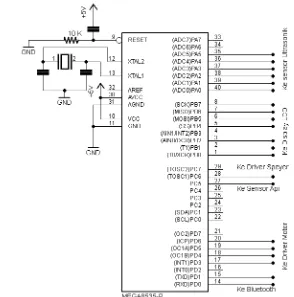
3.2 Rangkaian Mikrokontroler ATMEGA8535
mikrokontroller dapat bekerja, jika ada komponen yang kurang, maka mikrokontroller tidak akan bekerja. Dalam perancangan alat ini, sistem minimum mikrokontroler ATMEGA8535 terdiri dari:
1. Chip IC mikrokontroler ATMEGA8535 2. Kristal 12 MHz
3. Kapasitor 4. Resistor
Rangkaian mikrokontroler ATMEGA8535 ditunjukkan pada gambar berikut ini:
Gambar 3.2 Rangkaian mikrokontroller ATMEGA8535
menggunakan komponen kristal sebagai sumber clocknya. Nilai kristal ini akan mempengaruhi kecepatan mikrokontroler dalam mengeksekusi suatu perintah tertentu.
Pada pin 9 dihubungkan dengan sebuah kapasitor dan sebuah resistor yang dihubungkan ke ground. Kedua komponen ini berfungsi agar program pada mikrokontroler dijalankan beberapa saat setelah power aktip. Lamanya waktu antara aktipnya power pada IC mikrokontroler dan aktipnya program adalah sebesar perkalian antara kapasitor dan resistor tersebut.
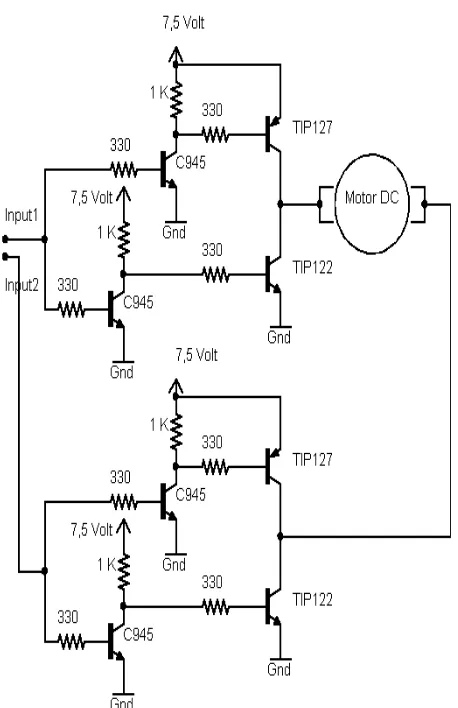
3. 3 Rangkaian Driver Motor DC
Mobil pada perancangan ini menggunakan sebuah motor DC yang berfungsi untuk menggerakkan roda belakangnya. Motor DC akan berputar searah/ berlawanan arah dengan jarum jam jika salah satu kutubnya diberi tegangan positip dan kutub yang lainnya dihubungkan dengan ground. Dan motor DC akan berputar kearah sebaliknya jika polaritasnya dibalik. Dengan sifat yang demikian maka dibutuhkan suatu rangkaian yang dapat membalikkan polaritas yang diberikan ke motor DC tersebut, sehingga perputaran motor DC dapat dikendalikan oleh rangkaian tersebut. Dan jika rangkaian tersebut dihubungkan dengan mikrokontroler ATMEGA8535, maka pergerakan motor dapat dikendalikan oleh mikrokontroler melalui program yang diisikan pada mikrokontroler tersebut.
Gambar 3.3 Rangkaian driver motor DC
Pada rangkaian di atas, jika Input1 diset high yang berarti input2 mendapat tegangan 6,2 volt, maka kedua transistor tipe NPN C945 yang disebelah atas akan saturasi (dimana Ic mendekati maksimum). Hal ini akan membuat kolektor kedua transistor C945 itu akan mendapat tegangan 0 volt dari ground.
(
)
Kolektor transistor C945 yang berada di sebelah atas bagian atas diumpankan ke basis transistor tipe PNP TIP 127 sehingga basis transistor TIP 127 mendapatkan tegangan 0 volt yang menyebabkan transistor ini aktip (Ic ≈ maksimum dan R
kolektornya terhubung ke emiter sehingga kolektor mendapatkan tegangan 6,2
Sedangkan kolektor transistor C945 yang berada di sebelah atas bagian bawah diumpankan ke basis transistor tipe NPN TIP 122 sehingga basis transistor TIP 122 mendapatkan tegangan 0 volt yang menyebabkan transistor ini tidak aktip (cut off dimana Ic ≈ 0 ). Karena transistor TIP 122 ini tidak aktip, maka
kolektornya tidak terhubung ke emiter, sehingga kolektor tidak mendapatkan tegangan 0 volt dari ground.
(
)
Karena kolektor TIP 122 dihubungkan dengan kolektor TIP 127 yang mendapatkan teganagan 6,2 volt dari Vcc, maka kolektor TIP 122 juga mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kiri mendapatkan tegangan 6,2 volt (polaritas positip).
Agar motor dapat berputar ke satu arah maka kaki sebelah kanan motor harus mendapatkan tegangan 0 volt (polaritas negatip). Hal ini diperoleh dengan memberikan logika low (0) pada input2 mikrokontroler ATMEGA8535.
mendapatkan tegangan 6,2 volt dari Vcc, tetapi mendapatkan tegangan yang berasal dari transistor TIP 122 yang berada di bawahnya.
Sedangkan kolektor dari transistor C945 yang berada di sebelah bawah bagian bawah diumpankan ke basis transistor tipe NPN TIP 122 sehingga basis transistor TIP 122 mendapatkan tegangan 6,2 volt yang menyebabkan transistor ini menjadi aktip. Karena transistor TIP 122 ini menjadi aktip, menyebabkan kolektornya terhubung ke emiter, sehingga kolektor mendapatkan tegangan 0 volt dari ground.
Karena kolektor TIP 122 yang mendapatkan teganagan 0 volt dari ground dihubungkan dengan kolektor TIP 127, maka kolektor dari TIP 127 juga mendapatkan tegangan yang sama. Hal ini menyebabkan kaki motor sebelah kanan mendapatkan tegangan 0 volt (polaritas negatip). Hal ini akan menyebabkan motor akan berputar ke satu arah tertentu.
Sedangkan untuk memutar motor kearah sebaliknya, maka logika yang diberikan ke input1 adalah low (0) dan logika yang diberikan ke input2 adalah high (1).
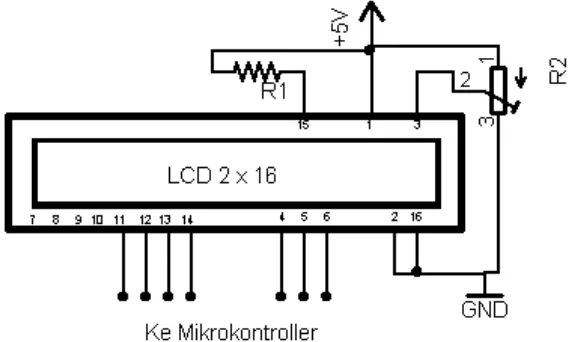
3.4 Rangkaian LCD (Liquid Crystal Display)
LCD adalah modul penampil yang banyak digunakan karena tampilannya menarik. LCD yang paling banyak digunakan saat ini ialah LCD LMB162ABC karena harganya cukup murah. LCD LMB162ABC merupakan modul LCD dengan tampilan 2x16 (2 baris x 16 kolom) dengan konsumsi daya rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD.
LCD yang umum, ada yang panjangnya hingga 40 karakter (2x40 dan 4x40), dimana kita menggunakan DDRAM untuk mengatur tempat penyimpanan karakter tersebut.
Tabel 3.1 Peta memori LCD
Gambar berikut menampilkan hubungan antara LCD dengan port mikrokontroler:
Gambar 3.4 Rangkaian Skematik dari LCD ke mikrokontroler
3.5 Rangkaian Sensor Jarak SR-04
Sensor jarak yang digunakan adalah sensor SR-04 ultrasonic. Sensor ini dapat mengukur jarak hingga 4 meter, sensor ini menggunakan motode pemancaran dan penerimaan sinyal suara ultrasonic. Gambar sensor jarak SR-04 ditunjukkan pada gambar berikut ini:
Gambar 3.5 Rangkaian Sensor Jarak SR-04
Sensor jarak SR-04 ultrasonic ini didesign untuk mengukur jarak. Sensor ini terdiri dari 3 pin, yaitu satu pin untuk Vcc 5 Volt, satu pin untuk ground dan satu pin untuk sinyal.
3.6 Rangkaian Sensor Api Dan Penguat
Gambar 3.6 Rangkaian Penerima sinar infra merah dari api
Potodioda memiliki hambatan sekitar 20 s/d 50 Mohm jika tidak terkena sinar infra merah dari api, dan hambatannya akan berubah menjadi sekitar 500 s/d 1.000 Kohm jika terkena sinar infra merah dari api tergantung dari besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil.
Fotodioda merupakan komponen yang akan mengalami perubahan hambatan jika disinari oleh sinar infra merah. Untuk mengubah perubahan hambatan tersebut menjadi perubahan tegangan, maka fotodioda harus diserikan dengan resistor yang biasa dikenal dengan rangkaian pembagi tegangan, dengan demikian perubahan hambatan pada fotidioda, akan menyebabkan perubahan tegangan pada output dari rangkaian pembagi tegangan.
Pada perancangan ini diserikan fotodioda dengan resistor 33 k, hal ini bertujuan agar sensitifitas dari sensor dapat diatur sesuai dengan keinginan, melalui penguatan pada OP Amp.
3.7 Perancangan Rangkaian Driver Spreyer
Spreyer yang digunakan adalah spreyer 6 – 15 volt, dengan arus stabil sebesar 450mA. Rangkaian rangkaian driver spreyer ini berfungsi sebagai saklar elektronik untuk menghubungkan spreyer dengan sumber tegangan positip. Pada perancangan ini digunakan relay 12 volt dan sebuah rangkaian transistor sebagai saklar. Rangkaian driver spreyer ini ditunjukkan pada gambar berikut ini :
Gambar 3.7 Rangkaian Spreyer Dimana NO : keadaan spreyer ON
NC : keadaan spreyer OFF
3.8 Rangkaian relay
Komponen utama dari rangkaian ini adalah relay. Relay merupakan salah satu komponen elektronik yang terdiri dari lempengan logam sebagai saklar dan kumparan yang berfungsi untuk menghasilkan medan magnet. Pada rangkaian ini digunakan relay 12 volt, ini berarti jika positip relay (kaki 1) dihubungkan ke sumber tegangan 12 volt dan negatip relay (kaki 2) dihubungkan ke ground, maka kumparan akan menghasilkan medan magnet, dimana medan magnet ini akan menarik logam yang mengakibatkan saklar terhubung.
adalah 4088, relay ini dapat bekerja dengan baik pada tegangan 9-15 volt, oleh sebab itu pada alat ini digunakan tegangan 12 volt sebagai tegangan kerja relay. relay ini memerlukan arus sebesar 38 mA untuk dapat bekerja dengan baik, maka transistor yang digunakan harus dapat mengalirkan arus 38 mA pada colektornya.
Pada alat ini digunakan transistor tipe NPN C945, yang dapat mengalirkan arus maksimal 100 mA pada kolektornya. Input dari rangkaian ini dihubungkan ke mikrokontroler, sehingga ON/OFF relay dapat dikendalikan oleh mikrokontroler.
3.9Perancangan Program
Pada perancangan ini digunakan Code Vision AVR sebagai editor dan compiler dari program yang dirancang. Untuk memulai memprogram Code Vision AVR dilakukan langkah sebagai berikut :
1. Buka software CodeVisionAVR (terdapat Shortcut pada Desktop). 2. Pilih menu File New dan pilih Project kemudian tekan OK.
Gambar 3.8 Pemilihan tipe file
Gambar 3.9 Dialog konfirmasi tentang penggunaan CodeWizardAVR
4. Pada settingan CodeWizardAVR, atur konfigurasi chip menggunakan ATMega8535 sesuai dengan yang ada pada modul, dengan nilai clock 11,059200 MHz.
Gambar 3.10 Pemilihan Tipe Mikrokontroller dan Kristal
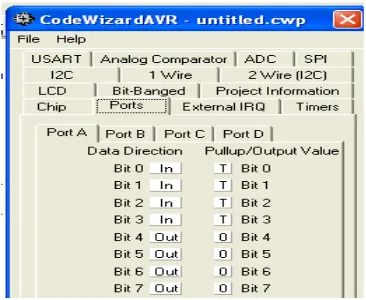
5. Kemudian pada tab Port, PortA, pada Bit 4, 5, 6 dan 7 diatur sebagai output. Port A digunakan untuk mengendalikan palang masuk dan keluar. Tampilannya sebagai berikut.
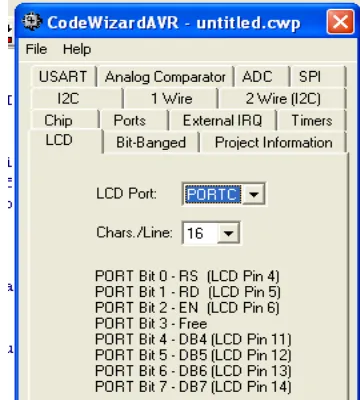
6. Selanjutnya mengatur penenpatan LCD pada PORTC. Tampilannya berikut ini:
Gambar 3.12 Setting penempatan LCD pada PORTC
7. Setelah itu, pilih menu File Generate, Sava and Exit, dan simpan file dengan nama sesuai keinginan uji.
Gambar 3.13 Generate, Save dan Exit
8. Akan muncul file.c yang akan digunakan untuk pemrograman. Selanjutnya pada file ini dituliskan program sesuai dengan yang diinginkan.
3.10 Perancangan Pengkoneksi Bluetoot
Prepair dapat diartikan sebagai kesepakatan antara dua device untuk saling berhubungan. Proses ini hanya perlu dilakukan sekali saja pada saat pertama kali. Berikut cara melakukan Prepair pada komputer :
1. Pada papan taskbar lihat bagian Bluetooth.
Gambar 3.14 Menu Bluetooth
2. Klik kanan dan pilih Add A Device untuk menemukan perangkat baru, maka akan muncul tampilan sebagai berikut.
Gambar 3.15 Perangkat Bluetooth Yang Terdeteksi Komputer
3. Pada bagian service, centang pada kotak serial port lalu klik OK. Maka computer dan device lain akan terhubung.
4. Klik kanan pada menu Bluetooth, maka akan muncul kotak dialog, pilih pada bagian Open Setting
6. Buka aplikasi penukar data HYPERTRM pada kotak dialog connection description ketikkan nama alamat lalu klik OK
Gambar 3.16 Aplikasi Penukar Data
7. Tentukan COM Port sesuai dengan yang di deteksi sebelumnya, lalu klik OK 8. Pada kotak dialog COM47 tentukan nilai bit per second sebesar 9600 dan Flow
Control None, lalu klik OK.
9. Akan tampil kotak dialog com 47 yang telah terhubung dengan device lain dan akan muncul data jarak halangan yang dibaca alat yang langsung di kirimkan ke pembaca Hyperteminal
Gambar 3.18 Tampilan Terminal Pengirim Data
3.11 Cara Kerja Sistem Keseluruhan
Inti dari cara kerja sistem ini seperti terlihat pada blok diagram di atas adalah robot berjalan mencari nyala api ketika telah menemukan nyala api tersebut robot berhenti dan mematikan nyala api tersebut.
Cara kerja sistem secara keseluruhan seperti berikut:
maka LCD akan menampilkan pembacaan jarak yang di baca oleh semua sensor jarak ultrasonic SR-04 yang kemudian akan di kirimkan ke computer/PC melalui koneksi Bluetooth, sensor api akan mendeteksi adanya nyala api, jika tidak terdapat nyala api maka robot berjalan untuk mencari nyala api. Dalam proses pencarian nyala api robot dikendalikan oleh Sensor Ultrasonik SR-04. Sensor Ultrasonik SR-04 ini berfungsi sebagai alat navigasi pada robot, dimana sensor SR-04 ini bekerja untuk mendeteksi adanya halangan yang berada di depan, kiri maupun kanan. Jika terdapat halangan didepan maka robot akan mundur, jika terdapat halangan di samping kiri robot maka robot akan berbelok ke kanan dan jika terdapat halangan di samping kanan maka robot akan berbelok kekiri. Dengan adanya sensor Ultrasonik ini robot tidak akan menabrak halangan yang menghambat laju robot sehingga robot dapat terus berjalan mencari nyala api.
START
BAB 4
HASIL DAN PEMBAHASAN
4.1Pengujian Sensor Api
Pengujian dilakukan dengan mengukur jarak deteksi api dengan deteksi sudut. Dalam hal ini pengujian dilakukan dengan variable sudut yang diatur. Berikut adalah data penyajian sensor api dengan deteksi jarak :
Tabel 4.1 Hasil Pengujian Deteksi Sudut Dan Deteksi Jarak Sensor Api Pembacaan
-30°
Gambar 4.1 Range pembacaan sensor api fotodioda terhadap deteksi jarak dan sudut
Berdasarkan tabel 4.1 pengujian fotodioda sebagai sensor api terhadap sudut dan jarak deteksi api kita dapat menyimpulkan bahwa sensor api memenuhi karakteristiknya dengan kemampuan pembacaan sudut dimulai dari 0° hingga 30°seperti tampak pada gambar 4.1 . Dimana pada sudut 0° hingga 30° fotodioda mampu mengenali titik api dan robot tracking langsung menuju titik api untuk memadamkan api.
Dari pengujian yang dilakukan sensor api yakni fotodioda, bahwa sensor mampu membaca adanya nyala api disekitarnya dengan jarak alat tracking api dari sumber api sejauh 30 cm dengan pembacaan sudut 0°, nyala api sudah bisa dibaca oleh sensor api fotodida. Namun pada interfal sudut 45° fotodioda tidak mampu membaca ada tidaknya titik api.
4.2 Pengujian Sensor Jarak SR-04
Tabel 4.2. Hasil Pengujian Sensor Jarak SR-04 Bagian Kanan dengan Media Pantul Dinding Beton
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 90 ��− 88,3 ��
90 �� X 100% = 1,8 %
Tabel 4.3. Hasil Pengujian Sensor Jarak SR-04 Bagian Kanan dengan Media
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 90 ��− 86,8 ��
90 �� X 100% = 3,5 %
Tabel 4.4. Hasil Pengujian Sensor Jarak SR-04 Bagian Kanan dengan Media Pantul Dinding Triplex
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 90 ��− 87,9 ��
90 �� X 100% = 2,3 %
Tabel 4.5. Hasil Pengujian Sensor Jarak SR-04 Bagian Depan dengan Media Pantul Dinding Beton
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 60 ��− 58,7 ��
60 �� X 100% = 2,1 %
Tabel 4.6. Hasil Pengujian Sensor Jarak SR-04 Bagian Depan dengan Media Pantul Dinding Sterofom
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 180 ��− 173 ,7 ��
180 �� X 100% = 3,5 %
Tabel 4.7. Hasil Pengujian Sensor Jarak SR-04 Bagian Depan dengan Media Pantul Dinding Triplex
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 90 ��− 85,8 ��
90 �� X 100% = 4,6 %
Tabel 4.8. Hasil Pengujian Sensor Jarak SR-04 Bagian Kiri dengan Media Pantul Dinding Beton
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 90 ��− 86,8 ��
90 �� X 100% = 3,5 %
Tabel 4.9. Hasil Pengujian Sensor Jarak SR-04 Bagian Kiri dengan Media Pantul Dinding Sterofom
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 90 ��− 89,1 ��
90 �� X 100% = 1 %
Tabel 4.10. Hasil Pengujian Sensor Jarak SR-04 Bagian Kiri dengan Media Pantul Dinding Triplex
Media Pantul Pengukuran Secara Teori
Dari data di atas dapat dihitung persentase ralat dari sensor jarak ultrasonic SR-04 dengan menggunakan rumus sebagai berikut :
% Ralat = ���������� �����������(��)−�������������� ������ (��)
���������� �����������(��) X 100%
Maka dapat kita ketahui besar persentase ralatnya ialah :
% Ralat = 90 ��− 87,2 ��
90 �� X 100% = 3,5 %
Hasil perhitungan persen(%) ralat pembacaan halangan dari masing-masing sensor dengan media pantul yang berbeda dan jarak yang divariasikan dapat dilihat pada tabel berikut:
Tabel 4.11 %Ralat Rata-Rata Hasil Pengujian Sensor Jarak SR-04 Dengan Media Pantul Yang Divariasikan.
Media Pantul % Ralat Rata-Rata Sensor
4.3 Pengujian Manuver Robot Tracking
Pengujian dilakukan untuk melihat arah belokan robot tracking api dalam beberapa kondisi pembacaan halangan. Pengujian manuver robot tracking api dilakukan dengan mengukur jarak deteksi halangan yang paling memungkinkan untuk berbelok. Dalam hal ini pengujian dilakukan dengan jarak halangan yang diatur. Berikut adalah data pengujian manuver robot tracking api :
Tabel 4.12 Pengujian Manuver Robot Tracking Api Jarak Halangan
4.4 Pengujian Koneksi Bluetooth
Pengujian koneksi bluetooth bertujuan mengkoneksikan alat tracking api ke computer/PC agar jarak halangan yang dibaca oleh sensor jarak ultrasonik SR-04 tampil di computer/PC. Pengkoneksian ini dilakukan dengan terlebih dahulu memprogram aplikasi bluetoot pada pemrograman CodeVisionAVR Evaluation versi 3.08 dengan menggunakan bahasa pemrograman C. pemrograman ini dimaksudkan agar bias menampilkan jarak halangan yang dikirimkan alat ke computer/PC sehingga kita dapat dengan mudah mengetahui jarak sumber api dari alat tracking api tersebut. Berikut ini tampilan pembacaan jarak yang dikoneksikan dari alat ke bluetoot computer/PC.
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil pengujian dan analisa robot tracking api yang telah dilakukan, maka dapat diambil kesimpulan sebagai berikut :
1. Telah dirancang suatu alat yang mampu mencari jejak api dalam suatu ruangan dengan menggunaan fotodioda yang telah di fokuskan objek pantauannya difungsikan sebagai pencari jejak api melalui scanning yang dilakukan di sekitar ruangan, lalu mendekati titik api dan menyemprotkan air melalui spreyer untuk memadamkan api.
2. Berdasarkan pengujian yang dilakukan maka disimpulkan bahwa IC mikrokontroler 8535 sebagai pusat system mengkoordinir fungsi masing-masing komponen dalam sistem untuk melaksanakan logika perintah yang di keluarkan mikrokontroler sehingga tiap-tiap komponen pada alat ini dapat melaksanakan kerjanya.
5.2 Saran
DAFTAR PUSTAKA
Bejo, Agus.2008. C & AVR Rahasia Kemudahan Bahasa C Dalam Mikrokontroler ATMega 8535. Graha Ilmu. Yogyakarta.
Budhiarto, Widodo.2004. Interfacing Komputer dan Mikrokontroller. Elex Media Komputindo. Jakarta.
Budioko, Totok. 2005. Belajar Dengan Mudah dan Cepat Pemrograman Bahasa C. Gava Media. Jakarta.
Carlin, Benson. 1960. Ultrasonics. Second Edition. McGRAW-HILL Book Company, INC. New York.
Datasheet Mikrokontroler ATMega 8535.
Datasheet Ultrasonic Ranging Module HC-SR04. e-book http://wireless.klings.org.
Held, G. 2008. Introduction to Light Emitting Diode Technology and Applications. Worldwide [CRC Press].
James, F Cox 2001. Cetak Ulang dalam Cengage Learning. 2011: 91
Knoll, F.G. 2010. Deteksi Radiasi Dan Pengukuran. Wiley Hoboken NJ. ISBN 978-0-470-13148-0.
Malik, Ibnu. 2003. Pengantar Membuat Robot. Penerbit Gava Media. Yogyakarta. Pitowarno, Endra.2006. Robotika Desain, Kontrol, Dan Kecerdasan Buatan.
Andi. Yogyakarta.
Setiawan, 2011. 20 Aplikasi Mikrokontroler ATMega 8535 & ATMega 16 Menggunakan Bascom-AVR. Andi. Yogyakarta.
Sumber – Sumber dari internet (www.Atmel.com), 16 Januari 2014, 08.16. Young, Hugh D. 2001. Fisika Universitas. Erlangga. Jakarta.
Diakses pada 18 Januari 2014,20.34.
LAMPIRAN PROGRAM
/***************************************************** This program was produced by the
CodeWizardAVR V2.05.3 Standard Automatic Program Generator
© Copyright 1998-2011 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Project : Version :
Date : 02/06/2014
Author : Desy C N Sinaga
Company : Fisika Instrumentasi S-1
Chip type : ATmega8535 Program type : Application
AVR Core Clock frequency: 11,059200 MHz Memory model : Small
External RAM size : 0 Data Stack size : 128
*****************************************************/ #include <mega8535.h>
// Alphanumeric LCD functions #include <alcd.h>
// Standard Input/Output functions #include <stdio.h>
#include <delay.h>
int y, kiri_mundur, kiri_maju, kanan_mundur, kanan_maju;
interrupt [TIM0_OVF] void timer0_ovf_isr(void)
// Declare your global variables here unsigned int i, count=0;
count=0;
{ kanan_maju=150; kanan_mundur=0; kiri_maju=150; kiri_mundur=0;}
void belok_kanan()
{ kanan_maju=0; kanan_mundur=250; kiri_maju=250; kiri_mundur=0;}
void belok_kiri()
void berhenti()
{ kanan_maju=0; kanan_mundur=0; kiri_maju=0; kiri_mundur=0;}
void belok_kanan_90() {
for(i=0;i<=30;i++) {
belok_kanan(); delay_ms(10); }
}
void belok_kiri_90() {
for(i=0;i<=30;i++) {
belok_kiri(); delay_ms(10); }
}
void main(void) {
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Func7=In Func6=In Func5=In Func4=Out Func3=In Func2=Out Func1=In Func0=Out
// State7=T State6=T State5=P State4=0 State3=P State2=0 State1=P State0=0 PORTA=0x2A;
DDRA=0x15;
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=Out Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=0 State5=P State4=T State3=T State2=T State1=T State0=P PORTC=0x21;
DDRC=0x40;
// Port D initialization
// Func7=In Func6=Out Func5=Out Func4=Out Func3=Out Func2=In Func1=In Func0=In
// State7=T State6=0 State5=0 State4=0 State3=0 State2=T State1=T State0=T PORTD=0x00;
DDRD=0x78;
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: 11059,200 kHz // Mode: Normal top=0xFF // OC0 output: Disconnected TCCR0=0x01;
TCNT0=0x00; OCR0=0x00;
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity // USART Receiver: Off
// USART Transmitter: On // USART Mode: Asynchronous // USART Baud Rate: 9600
// Analog Comparator initialization // Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off ACSR=0x80;
SFIOR=0x00;
// Alphanumeric LCD initialization // Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu: // RS - PORTB Bit 7
lcd_gotoxy(0,0); lcd_putsf(" Robot"); lcd_gotoxy(0,1);
sprintf(data_lcd,"F=%0.01f",jarak_depan);
if(PINC.5==0){PORTC.6=1; lcd_gotoxy(10,1); lcd_putsf("Api");} else {PORTC.6=0;lcd_gotoxy(10,1);lcd_putsf("Aman");}
GAMBAR ROBOT TRACKING API
GAMBAR 1 TAMPAK SAMPING ROBOT TRACKING API