PEMODELAN TEC IONOSFER DI ATAS SUMATRA DAN
SEKITARNYA MENDEKATI REAL TIME DARI DATA GPS NTUS
Buldan Muslim
Bidang Ionosfer dan Telekomunikasi Pusat Pemanfaatan Sains Antariksa, LAPAN Jl. Dr. Junjunan 133 Bandung, 40173 Telp. 022-6012602
Email: [email protected]
INTISARI
Ionosfer mempengaruhi propagasi sinyal radio yang menjalar dari satelit sampai penerima GPS berupa tambahan waktu propagasi yang besarnya tergantung pada TEC ionosfer dan frekuensi yang digunakan. Jika koordinat satelit dan stasiun penerima GPS diketahui maka dari data GPS frekuensi ganda dapat diturunkan parameter total electron content (TEC) ionosfer pada titik potong lintasan sinyal GPS di ionosfer. Dari satu stasiun GPS Singapura NTUS dapat dikembangkan model TEC ionosfer di atas Sumatra dan sekitarnya yang mana cakupan model tersebut tergantung pada sudut elevasi minimum yang digunakan. Makalah ini menerangkan prosedur pemodelan TEC mendekati real time di atas Sumatra dan sekitarnya dari satu stasiun GPS NTUS di Singapura.
Kata kunci: GPS, TEC, model.
1. Pendahuluan
Ionosfer adalah bagian dari atmosfer atas (di atas 100 km dari permukaan bumi)
yang terdiri dari elektron-elektron yang dapat mempengaruhi propagasi gelombang
elektromagnetik. Ionosfer mempengaruhi propagasi sinyal kode GPS berupa tambahan
waktu tempuh penjalarannya yang besarnya tergantung pada total electron content
(TEC) di ionosfer dan frekuensi sinyal GPS.
TEC adalah kandungan elektron total dalam suatu silinder berpenampang 1 meter
persegi yang panjangnya sama dengan jarak dari satelit ke penerima GPS. Dalam
kondisi normal pengaruh ionosfer pada sinyal GPS biasanya hanya beberapa meter
sampai beberapa puluh meter, tetapi dapat mencapai 100 meter atau lebih pada saat ada
badai ionosfer. Setelah Selective Availability (SA) tidak diaktifkan, pengaruh ionosfer
menjadi sumber kesalahan yang terbesar. Untuk mendapatkan penentuan posisi dengan
presisi yang tinggi kesalahan yang bersumber dari ionosfer harus diestimasi agar dapat
dieliminir dalam pengamatan GPS. Estimasi pengaruh ionosfer juga penting untuk
penelitian cuaca antariksa dan aplikasi pengamatan bumi (Komjathy, 1997).
Amerika sejak 2004 telah dapat diperoleh produk karakterisasi TEC ionosfer di
atas CONUS (Continental US) secara real time dari SEC (NOAA Space Environment
Center). Produk berupa peta TEC di atas CONUS diberikan secara real time setiap 15
menit menggunakan sekitar 100 GPS real time dari jaringan CORS. Peta TEC real time
ini telah diaplikasikan untuk koreksi ionosfer pada penentuan posisi GPS frekuensi
tunggal, NDGPS, resolusi ambiguitas double differences untuk penentuan posisi cepat
dengan presisi sentimeter. Model yang digunakan untuk pemetaan TEC US ini adalah
model assimilasi ionosfer dengan filter Kalman dan dengan data GPS real time
(Kunches, 2007).
Buldan dkk., (2009) telah mengembangkan metode komputasi TEC harian dan
jaman mendekati real time dari data GPS NTUS sehingga diperoleh data TEC
mendekati real time yang dapat diakses dengan keterlambatan sekitar antara 1 - 2 jam.
Makalah ini menjelaskan prosedur pemodelan TEC ionosfer di atas Sumatra dan
sekitarnya yang diturunkan dari data GPS Singapura NTUS mendekati real time.
2. Data dan Metodologi
Data yang digunakan dalam komputasi TEC mendekati real time ini adalah data
pengamatan GPS mendekati real time resolusi tinggi (1Hz), data orbit satelit GPS dan
data koordinat stasiun GPS serta data bias receiver. Data tersebut dapat didownload
dari ftp://cddis.nasa.gov/ (data GPS stasiun NTUS dan data orbit GPS), dari
ftp://ftp.unibe.ch/aiub/CODE/ (data DCB untuk kalibrasi hasil komputasi TEC) dan dari
ftp://igscb.jpl.nasa.gov/pub/stastion/general/igs.snx (untuk data koordinat stasiun
NTUS).
Prosedur pertama kali pemodelan TEC mendekati real time adalah identifikasi
waktu yang meliputi tahun, bulan, tanggal, jam dan menit yang diperoleh dari jam di
PC. Untuk stasiun GPS di Indonesia dan sekitarnya yang dapat memberikan data jaman
mendekati real time dengan resolusi 1 Hz adalah data GPS NTUS sehingga pada awal
program ditentukan stasiun GPS NTUS.
Prosedur berikutnya adalah mencari data yang diperlukan yang telah tersedia di
server ftp sesuai dengan waktu yang telah diidentifikasi. Jika pencarian berhasil maka
langkah berikutnya adalah mendownload data GPS, data orbit, data stasiun dan data bias
Data yang ada pada penerima sinyal GPS frekuensi ganda yang digunakan di
stasiun referensi berisi pengamatan kode dan fase pada frekuensi L1 (f1 = 1575,42 MHz)
dan L2 (f2 = 1227,60 MHz) yang dinotasikan dengan Pi dan Φi (i = 1, 2). Secara
matematik pengamatan-pengamatan tersebut dapat diuraikan sebagai berikut (Gao dkk,
2002, dengan sedikit perubahan notasi)
Untuk frekuensi L1:
Dengan ρrs adalah jarak geometri sebenarnya antara satelit dan penerima (m), c adalah
kecepatan cahaya (m/s), dt adalah kesalahan jam satelit terhadap waktu GPS (s), dT
adalah kesalahan jam penerima terhadap waktu GPS (s), λi adalah panjang gelombang
sinyal GPS pada frekuensi Li (m) , Ni adalah ambiguitas integer fase gelombang
pembawa (siklus), dtrop adalah waktu tunda troposfer (m), dion adalah waktu tunda
ionosfer (m), dorb adalah kesalahan orbit satelit (m), dm adalah efek multipath (m), b
adalah waktu tunda hardware satelit (m), B adalah waktu tunda hardware penerima (m), ε adalah derau pengukuran (m).
Dengan data persamaan pengamatan jarak kode satelit GPS tersebut kita dapat
menghitung TEC dengan persamaan (Liu, 2004)
(
)
di mana bp adalah bias differensial pengamatan jarak kode untuk satelit dan Bp adalah
bias differensial pengamatan kode untuk penerima GPS dan γ = ( f1/ f2).
Dari data pengamatan jarak fase satelit GPS juga dapat dihitung TEC fase (STECf)
menggunakan persamaan (Liu, 2004)
dengan bf dan Bf adalah bias diferensial pengamatan jarak fase untuk satelit dan
penerima masing-masing.
Pengurangan persamaan (5) dengan (6) menghasilkan perbedaan antara TEC
kode dan TEC fase dalam bentuk
f k
n STEC STEC
STEC = −
∆ (7)
yang dengan substitusi akan diperoleh persamaan yang setelah disusun kembali menjadi
(
)
(
)
Secara teori nilai ∆STEC ini tetap selama periode tertentu karena antara kode dan fase
melewati ionosfer yang sama lokasinya. Maka dapat diperoleh secara lebih halus
(smooth) dengan perata-rataan dalam selang waktu tertentu. Nilai rata-rata perbedaan
tersebut pada waktu pengamatan N dapat diperoleh secara rekursif menggunakan
persamaan
Setelah nilai nilai rata-rata perbedaan tersebut dihitung maka dapat ditambahkan
pada persamaan STEC fase untuk mendapatkan STEC kombinasi STEC kode dan
STEC fase sebagai
N
yang dengan memasukkan persamaan-persamaan yang sesuai dapat disusun kembali
menjadi
Setelah diperoleh data TEC turunan dari data kode dan fase sinyal GPS sebagaimana
diungkapkan dalam persamaan (11), kemudian data tersebut dikonversikan ke dalam
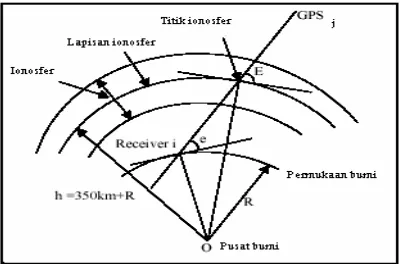
TEC arah vertikal menggunakan persamaan
Secara geometri hubungan antara lintasan sinyal GPS di ionosfer dengan model ionosfer
satu lapis itunjukkan pada Gambar 1.
Gambar 1. Ionosfer model satu lapis pada ketinggian 350 km.
Pada setiap jam pengamatan dapat diperoleh pengamatan VTEC dari beberapa
satelit GPS yang dapat diamati dari penerima NTUS yang melintasi ionosfer pada
lintang dan bujur yang berbeda-beda di atas Sumatra, Kalimantan Barat dan Jawa Barat
serta daerah sekitarnya yang mana cakupan pengamatan ionosfer tersebut tergantung
pada sudut elevasi yang digunakan.
Dengan diperolehnya data VTEC dari stasiun pengamatan GPS NTUS maka
model VTEC lokal di atas Sumatra dan sekitarnya dapat dibuat menggunakan
persamaan
variabel lintang dan M adalah orde fungsi polinom dengan variabel bujur. N dan M
dapat ditentukan berdasarkan kriteria rata-rata kesalahan mutlak yang terkecil antara
model dengan data pengamatan untuk sudut elevasi yang berbeda-beda dan pada orde
yang bervariasi.
Data komputasi TEC mendekati real time, model spasial TEC regional tiap jam
dalam bentuk gambar dan file numerik selanjutnya disimpan di PC pemroses. Data TEC
diupload ke server ftp://ftp.bdg.lapan.go.id/Ionosfer_dan_Telekomunikasi/TECGPS,dan
ke ftp://ftp.bdg.lapan.go.id/Ionosfer_dan_Telekomunikasi/IONOSFER_INDONESIA/
Prosedur selanjutnya adalah kembali ke awal yaitu indentifikasi waktu setelah
proses pemodelan TEC pada jam tersebut selesai. Jika jam menunjukkan masih sama
dengan jam pada awal proses maka dilakukan penundaan sampai masuk jam berikutnya
dan menitnya sudah masuk ke menit lebih besar dari menit ke 37, untuk menjamin dapat
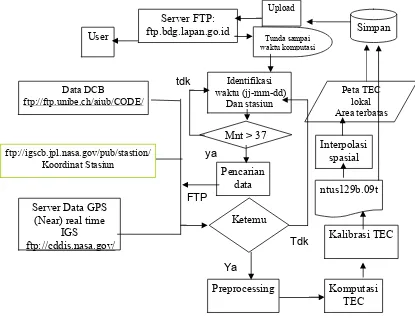
GPS NTUS telah tersedia di server ftp. Secara skematik algoritma pemodelan TEC
mendekati real time dalam makalah ini diilustrasikan dengan Gambar 2
Gambar 2 Diagram alir pemodelan TEC ionosfer regional mendekati real time.
3. Hasil dan Pembahasan
Proses download otomatis data GPS dan komputasi serta pemodelan TEC regional
dari data GPS NTUS telah dapat diimplementasikan dalam matlab dan telah
operasional. Proses pemodelan mulai dari identifikasi waktu sampai penyimpanan
hasilnya memerlukan waktu rata-rata kurang dari 30 menit kecuali pada saat trafik
internet sangat padat bisa lebih dari 30 menit bahkan bisa terjadi kegagalan koneksi
sehingga proses pemodelan harus diulang kembali.
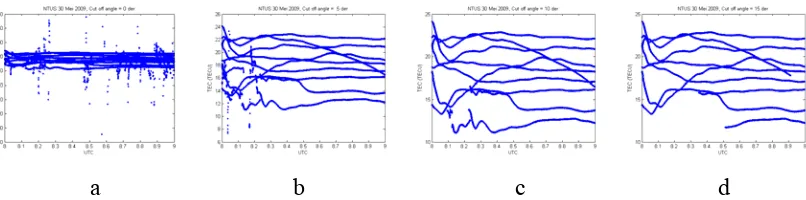
Hasil komputasi TEC untuk pengamaatan GPS NTUS tanggal 3 Juni 2009 dapat
dilihat pada Gambar 3a, 3b, 3c dan 3d yang masing-masing memperlihatkan nilai TEC Pencarian
data
Interpolasi spasial
Data DCB
ftp://ftp.unibe.ch/aiub/CODE/
ftp://igscb.jpl.nasa.gov/pub/stastion/ Koordinat Stasiun
FTP
Ya
Tdk
Peta TEC lokal Area terbatas Identifikasi
waktu (jj-mm-dd) Dan stasiun
Server Data GPS (Near) real time
IGS
ftp://cddis.nasa.gov/
Ketemu
Preprocessing Komputasi TEC Kalibrasi TEC ntus129b.09t Server FTP:
ftp.bdg.lapan.go.id Simpan
Tunda sampai waktu komputasi
Upload
User
Mnt > 37
tdk
dengan batas sudut elevasi minimum (cut off angle) bervariasi dari 0, 5, 10 dan 15
derajat. Diketahui dari gambar tersebut bahwa pada batas sudut elevasi minimum 15
derajat nilai TEC memiliki sifat yang kontinyu dan lebih halus tidak mengandung
multipath seperti pada sudut elevasi minimum kurang dari 10 derajat. Oleh karena itu
dalam pemodelan TEC dari data GPS disarankan menggunakan batas elevasi minimum
sebesar 15 derajat.
a b c d
Gambar 3. TEC ionosfer yang diturunkan dari data GPS NTUS untuk tanggal 3 Juni
2009.
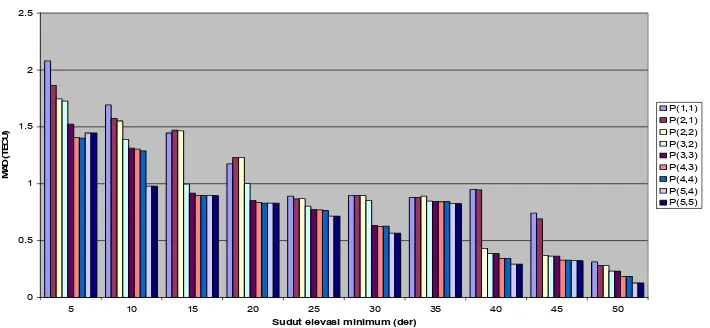
Pada Gambar 4 ditunjukkan nilai simpangan mutlak rata-rata (MAD, mean
absolute deviasion) model spasial TEC pada beberapa sudut elevasi yang berbeda mulai
dari 5 sampai 50 derajat dan untuk orde fungsi polinom yang bervariasi mulai dari orde
P(N,M) = P(1,1) sampai P(5,5). Dari gambar tersebut didapatkan bahwa pada sudut
elevasi minimum 15 derajat model P(3,2) merupakan model yang optimum karena pada
orde yang lebih tinggi peningkatan akurasi model tidak signifikan yaitu hanya sekitar
0,1 TECU. Simpangan model P(3,2) pada jam 8 UTC (15 LTC) kurang dari 1 TECU.
Untuk sudut elevasi minimum yang lebih tinggi sampai 35 derajat peningkatan akurasi
model kurang dari 0,2 TECU tetapi cakupan model menjadi lebih sempit.
Contoh model spasial TEC P(3,2) mendekati real time untuk tanggal 30 Mei 2009
pada jam 3, 5 dan 12 UTC ditunjukkan pada Gambar 5 yang memperlihatkan adanya
respon ionosfer terhadap perubahan ionisasi dari radiasi matahari yang semakin
meningkat dari jam 3 sampai 5 UTC sementara pada jam 12 UTC mulai terjadi
penurunan TEC karena semakin lemahnya sumber radiasi matahari pada waktu tersebut
NTUS 30 Mei 2009 jam 8 UTC
0 0.5 1 1.5 2 2.5
5 10 15 20 25 30 35 40 45 50
Sudut elevasi minimum (der)
M
A
D
(
T
E
C
U
)
P(1,1) P(2,1) P(2,2) P(3,2) P(3,3) P(4,3) P(4,4) P(5,4) P(5,5)
Gambar 4. MAD model TEC pada beberapa sudut elevasi minimum dan dengan orde polinom yang bervariasi dari P(N,M) = P(1,1), P(2,1), ... , P(5,5).
Gambar 5. TEC model P(3,2) dari data GPS NTUS tanggal 30 Mei 2009.
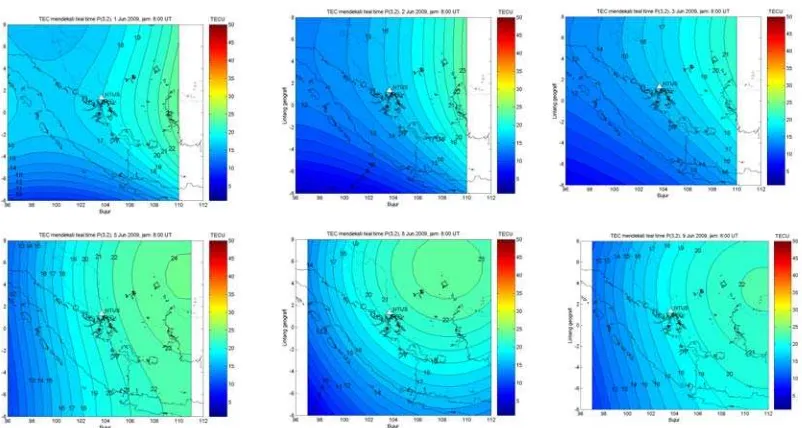
Gambar 6 menunjukkan variasi TEC harian pada ham 8 UTC dari tanggal 1 sampai 9
Juni 2009. Secara umum terdapat peningkatan TEC di sebelah timur dari peta yaitu di
atas Kalimantan Barat dan Jawa Barat serta Jawa Tengah. Hal ini menunjukkan bahwa
model P(3,2) dapat merepresentasikan dengan baik TEC di atas Sumatra, Jawa Barat
dan Kalimantan Barat pada jam 8 UTC. Tetapi untuk jam-jam lainnya model P(3,2)
dengan sudut elevasi minimum 15 derajat belum tentu dapat mencakup daerah seluas
pada jam 8 UTC tersebut seperti yang terjadi pada jam 2 UTC pada tanggal yang sama.
Sebagai perbandingan TEC model P(3,2) telah dibandingkan dengan TEC model
regional MSILRI (Buldan, 2007). TEC model MSILRI merupakan model bulanan yang
mewakili kondisi ionosfer yang tenang. Sebagaimana ditunjukkan pada Gambar 7, nilai
maksimum TEC model lokal P(3,2) mencapai 29 TECU hampir sama dengan nilai
maksimum TEC MSILRI yaitu sebesar 29,99 TECU tetapi terjadi pada waktu yang
1,5 TECU sedangkan TEC MSILRI mencapai terendah pada jam 6 waktu lokal dengan
nilai 3,2 TECU. Pola diurnal hampir sama dengan nilai korelasi 0,8. Pola paling mirip
terjadi pada waktu awal siang 9 – 13. Perbedaan terbesar terjadi pada jam sore hari jam
2 sampai jam 21 waktu lokal. Hal ini menunjukkan bahwa variabilitas anomali ionisasi
ionosfer lintang rendah sangat dinamis yang disebabkan oleh kombinasi drift
elketrodinamika E X B dan difusi sepanjang garis medan magnet bumi karena gravitasi
bumi.
Model TEC lokal di atas Sumatra dari data GPS NTUS masih perlu divalidasi
menggunakan model TEC lainnya untuk periode pengamatan yang lebih panjang.
Gambar 6. Variasi harian TEC model P(3,2) , 1 sampai 9 Juni 2009 pada jam 8 UTC.
Perbandingan model TEC
0 5 10 15 20 25 30 35
0 5 10 15 20 25
Waktu (LT)
T
E
C
(
T
E
C
U
)
TEC lokal TECMSILRI
4. Kesimpulan dan Rekomendasi
Pemodelan TEC ionosfer mendekati real di atas Sumatra dan sekitarnya dari data
GPS NTUS telah dapat dibuat dan telah dapat operasional secara otomatis melalui
pendeteksian waktu real di PC pemroses data GPS. Untuk stasiun GPS diperoleh sudut
elevasi minimum 15 derajat dan pada sudut tersebut diperoleh model TEC optimum
adalah P(3,2). Perbandingan model TEC lokal P(3,2) dari data GPS NTUS dengan
model TEC MSILRI menunjukkan bahwa model TEC tersebut memiliki pola kemiripan
cukup tinggi terutama pada saat proses ionisasi ionosfer lebih dominan pada pagi
setelah matahari terbit sampai siang hari. Karena dinamika ionosfer lintang rendah maka
nilai TEC model P(3,2) berbeda jauh dengan model TEC regional MSILRI pada saat
terjadi anomali ionisasi ionosfer lintang rendah pada sore hari sampai jam 21 LT.
Validasi lanjut diperlukan untuk mengetahui tingkat validitas cakupan pengamatan
ionosfer dari satu stasiun GPS NTUS.
Untuk membuat prediksi TEC secara spasial yang mencakup Indonesia bagian
barat diperlukan data GPS dari stasiun IGS lainnya seperti COCO di Cocos Island dan
XMIS di Crismast Island, DARW di Darwin dan PIMO di Filipina.
5. Daftar Pustaka
Buldan, M. (2009) : Pemodelan Ionosfer Lintang Rendah Geomagnet di Atas Wilayah Indonesia Dari Data GPS, Disertasi Doktor, ITB.
Gao, Y., dan Liu, Z.Z. (2002) : Precise Ionospheric Modeling Using Regional GPS Network Data, Journal of Global Positioning System, Vol. 1, No.1, 18-24.
Komjathy, A. (1997) : Global Ionospheric Total Electron Content Mapping Using the
Global Positioning System, Ph.D. dissertation, Department of Geodesy and
Geomatics Engineering Technical Report NO. 188, University of New Brunswick, Fredericton, New Brunswick, Canada, 248pp.
Kunches, J. (1997) : Space Weather Services for GPS, 47th CGSIC Fort Worth September 24, 2007
Liu, Z.Z. (2004) : Ionospheric Tomographic Modeling and Application Using Global
Positioning System (GPS) Measurements, Doctoral Thesis, University of Calgary,