6 BAB 2
TEORI DASAR
Pada bab ini akan dibahas mengenai dasar teori yang digunakan dalam penelitian ini, sekaligus hasil studi dari beberapa sumber referensi yang digunakan. Beberapa hal yang dibahas antara lain mengenai metode fotogrametri rentang dekat,
orthophoto dan true orthophoto, serta aplikasinya dalam pemodelan tiga dimensi. 2.1. Pemodelan Tiga Dimensi pada CityGML
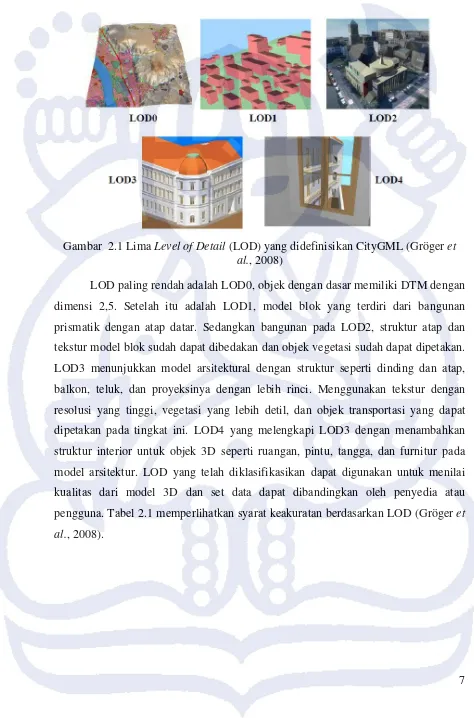
Dalam pembangunan sistem informasi geografis, pemodelan virtual tiga dimensi (3D) perkotaan semakin berkembang untuk aplikasi dalam berbagai bidang seperti perencaan perkotaan, telekomunikasi, manajemen bencana, navigasi kendaraan dan pejalan kaki, inventarisasi fasilitas, serta simulasi lingkungan (Gröger
et al., 2008). Karena penggunaan model kota 3D sangat beragam, penyedia data model tersebut pun bersifat heterogen. Dibutuhkan suatu kesamaan format model data untuk memudahkan pengguna mengaplikasikan data model kota 3D pada bidangnya masing-masing maupun dihubungkan dengan bidang lain.
7 Gambar 2.1 Lima Level of Detail (LOD) yang didefinisikan CityGML (Gröger et
al., 2008)
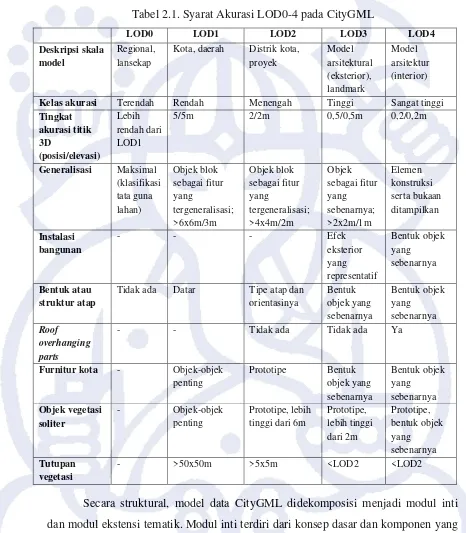
8 Tabel 2.1. Syarat Akurasi LOD0-4 pada CityGML
LOD0 LOD1 LOD2 LOD3 LOD4
Deskripsi skala model
Regional, lansekap
Kota, daerah Distrik kota, proyek
Kelas akurasi Terendah Rendah Menengah Tinggi Sangat tinggi
Tingkat
Furnitur kota - Objek-objek penting
Secara struktural, model data CityGML didekomposisi menjadi modul inti dan modul ekstensi tematik. Modul inti terdiri dari konsep dasar dan komponen yang harus ada dari model data CityGML, dan modul ekstensi merupakan komponen pendukung yang beririsan dengan modul inti secara tematik. Bidang tematik dari modul ekstensi CityGML antara lain Appearance, Bridge, Building, CityFurniture,
CityObjectGroup, Generics, LandUse, Relief, Transportation, Tunnel, Vegetation,
9 dilakukan untuk mendukung kombinasi dari modul ekstensi dan modul inti sesuai dengan informasi yang dibutuhkan.
Selain aspek spasial dan semantik, fitur CityGML juga memiliki aspek tampilan permukaan luar. TexturedSurface merupakan salah satu fitur penampilan tidak terbatas pada data visual atau sering disebut texture image. Fitur tersebut juga memiliki aspek tematik seperti radiasi inframerah, polusi suara, atau gempa yang disebabkan struktural stres. Oleh karena itu, penampilan dapat mendukung visualisasi, serta analisis.
Dua jenis penampilan yang disediakan adalah tekstur bergeoreferensi
(georeferenced texture) dan tekstur berparameter (parameterized texture). Tekstur bergeoreferensi menampilkan gambar tekstur 2D yang memiliki proyeksi planimetri terhadap model terain. Biasanya berupa orthophoto yang mampu merepresentasikan atap maupun dasar bangunan seperti yang diilustrasikan pada Gambar 2.2.
Gambar 2.2 Georeferenced texture yang diaplikasikan pada permukaan atap dan tanah (Gröger et al., 2008)
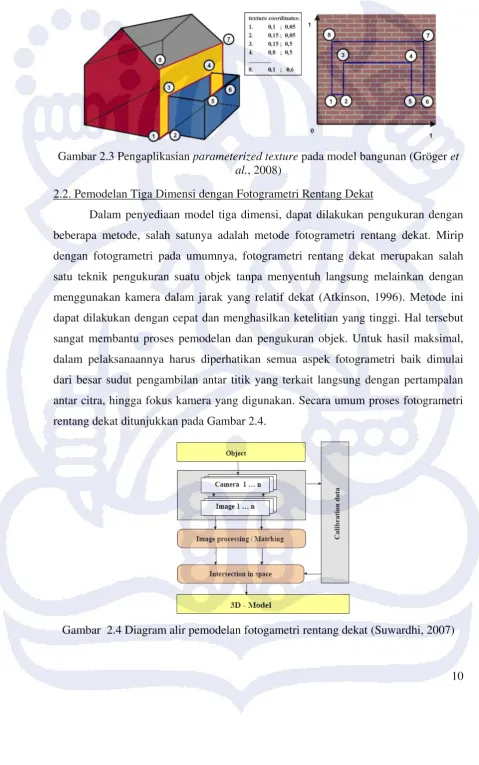
10 Gambar 2.3 Pengaplikasian parameterized texture pada model bangunan (Gröger et
al., 2008)
2.2. Pemodelan Tiga Dimensi dengan Fotogrametri Rentang Dekat
Dalam penyediaan model tiga dimensi, dapat dilakukan pengukuran dengan beberapa metode, salah satunya adalah metode fotogrametri rentang dekat. Mirip dengan fotogrametri pada umumnya, fotogrametri rentang dekat merupakan salah satu teknik pengukuran suatu objek tanpa menyentuh langsung melainkan dengan menggunakan kamera dalam jarak yang relatif dekat (Atkinson, 1996). Metode ini dapat dilakukan dengan cepat dan menghasilkan ketelitian yang tinggi. Hal tersebut sangat membantu proses pemodelan dan pengukuran objek. Untuk hasil maksimal, dalam pelaksanaannya harus diperhatikan semua aspek fotogrametri baik dimulai dari besar sudut pengambilan antar titik yang terkait langsung dengan pertampalan antar citra, hingga fokus kamera yang digunakan. Secara umum proses fotogrametri rentang dekat ditunjukkan pada Gambar 2.4.
11 Berdasarkan Gambar 2.4 hal pertama yang dilakukan adalah pengambilan foto dari objek dan melakukan kalibrasi kamera untuk mendapatkan parameter kalibrasi. Setelah itu dilakukan proses restitusi untuk membentuk model tiga dimensinya.
Ketelitian dari metode fotogrametri dijital ini dipengaruhi oleh beberapa faktor, antara lain (Wojtas, 2010):
1. Resolusi foto,
2. Parameter kalibrasi kamera, 3. Besar sudut cakupan, 4. Jumlah foto yang diprotret, 5. Sudut pencahayaan,
6. Stabilitas pemotretan.
Pada beberapa faktor tersebut, yaitu resolusi foto, resolusi yang tinggi memberikan fitur objek yang lebih presisi. Parameter kalibrasi kamera yang diketahui dapat meningkatkan keakuratan proses rekonstruksi. Besar sudut cakupan terbaik adalah 90 derajat, tetapi pada beberapa kasus proses image matching besar sudut tersebut dapat memberikan dampak negatif. Untuk jumlah foto yang dipotret, jumlah foto yang semakin banyak dan menunjang jaringan geometri dalam satu fitur akan menghasilkan ketelitian yang lebih baik. Sudut pencahayaan harus cukup untuk memungkinkan penerapan proses teknik pengukuran dijital. Serta stabilitas dalam pemotretan sebaiknya kamera diletakkan di tripod pada saat pemotretan agar lebih foto yang dihasilkan lebih stabil.
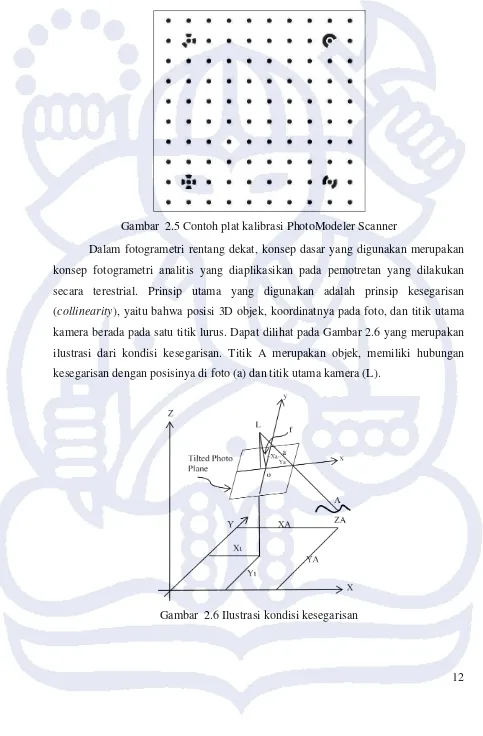
12 Gambar 2.5 Contoh plat kalibrasi PhotoModeler Scanner
Dalam fotogrametri rentang dekat, konsep dasar yang digunakan merupakan konsep fotogrametri analitis yang diaplikasikan pada pemotretan yang dilakukan secara terestrial. Prinsip utama yang digunakan adalah prinsip kesegarisan (collinearity), yaitu bahwa posisi 3D objek, koordinatnya pada foto, dan titik utama kamera berada pada satu titik lurus. Dapat dilihat pada Gambar 2.6 yang merupakan ilustrasi dari kondisi kesegarisan. Titik A merupakan objek, memiliki hubungan kesegarisan dengan posisinya di foto (a) dan titik utama kamera (L).
13 Setiap titik pada foto memiliki dua persamaan kesegarisan yang mendefinisikan koordinatnya di suatu foto (𝑥𝑎,𝑦𝑎). Secara matematis hubungan ini dinyatakan oleh rumus (Wolf & Dewitt, 2000):
𝑥𝑎 =−𝑓 𝑟11 𝑋0−𝑋 𝑟31 𝑋0−𝑋𝐴 +𝐴 +𝑟12 𝑌𝑟32 𝑌0−𝑌0−𝑌𝐴 +𝐴 +𝑟13 𝑍0−𝑍𝑟33 𝑍0−𝑍𝐴𝐴 =−𝑓𝑊𝑈 (2.1)
𝑦𝑎 =−𝑓 𝑟21 𝑋0−𝑋 𝑟31 𝑋0−𝑋𝐴 +𝐴 +𝑟22 𝑌𝑟32 𝑌0−𝑌0−𝑌𝐴 +𝐴 +𝑟23 𝑍0−𝑍𝑟33 𝑍0−𝑍𝐴𝐴 =−𝑓𝑊𝑉 (2.2)
Dimana:
𝑥𝑎,𝑦𝑎= koordinat objek pada sistem koordinat foto
𝑋0,𝑌0,𝑍0= koordinat titik pusat eksposur pada ssitem koordinat ruang 𝑋𝐴,𝑌𝐴,𝑍𝐴= koordinat objek pada sistem koordinat ruang
𝑓 = panjang fokus lensa kamera 𝑟11 = cos φ cos κ
𝑟12 = sin ɷ sin φ cos κ + cos ɷ sin κ 𝑟13 = - cos ɷ sin φ cos κ + sin ɷ sin κ 𝑟21 = - cos φ sin κ
𝑟22 = - sin ɷ sin φ sin κ + cos ɷ cos κ 𝑟23 = cos ɷ sin φ sin κ + sin ɷ cos κ 𝑟31 = sin φ
𝑟32 = - sin ɷ cos φ 𝑟33 = cos ɷ cos φ
14 Pada kondisi kesegarisan, belum ditautkan parameter-parameter kalibrasi kamera yang mengandung distorsi radial lensa dan distorsi tangensial. Oleh karena itu kondisi kesegarisan perlu dikembangkan dengan parameter kalibrasi kamera agar dapat digunakan untuk melakukan kalibrasi diri dan menghilangkan kesalahan sistematik.
Apabila persamaan kesegarisan ditulis pada persamaan (2.1) dan (2.2), maka persamaan kesegarisan yang mencakup parameter kalibrasi dapat dituliskan sebagai berikut (Wolf & Dewitt, 2000):
𝑥𝑎 =−𝑓𝑊𝑈 +𝛥𝑥 (2.3)
𝐾𝑖 = Parameter distorsi lensa radial 𝑃𝑖 = Parameter distorsi tangensial
2.3. Orthophoto dan True Orthophoto
Orthophoto merupakan sebuah foto yang diproses rektifikasi dengan tujuan untuk menghilangkan efek pergeseran relief (relief displacement), sehingga foto yang dihasilkan tampak seperti berproyeksi ortogonal. Akurasi posisi dan geometri dari objek yang diberikan dari orthophoto merupakan suatu hal penting dalam pembuatan informasi spasial, terutama pemodelan tiga dimensi (3D) bangunan (Amhar, 1998).
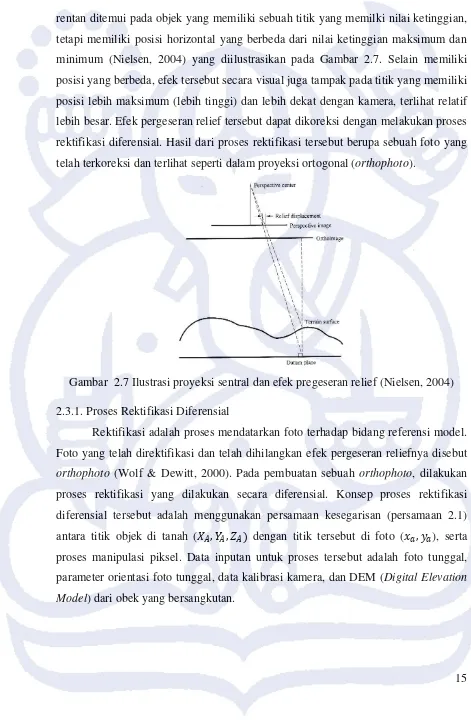
15 rentan ditemui pada objek yang memiliki sebuah titik yang memilki nilai ketinggian, tetapi memiliki posisi horizontal yang berbeda dari nilai ketinggian maksimum dan minimum (Nielsen, 2004) yang diilustrasikan pada Gambar 2.7. Selain memiliki posisi yang berbeda, efek tersebut secara visual juga tampak pada titik yang memiliki posisi lebih maksimum (lebih tinggi) dan lebih dekat dengan kamera, terlihat relatif lebih besar. Efek pergeseran relieftersebut dapat dikoreksi dengan melakukan proses rektifikasi diferensial. Hasil dari proses rektifikasi tersebut berupa sebuah foto yang telah terkoreksi dan terlihat seperti dalam proyeksi ortogonal (orthophoto).
Gambar 2.7 Ilustrasi proyeksi sentral dan efek pregeseran relief (Nielsen, 2004) 2.3.1. Proses Rektifikasi Diferensial
Rektifikasi adalah proses mendatarkan foto terhadap bidang referensi model. Foto yang telah direktifikasi dan telah dihilangkan efek pergeseran reliefnya disebut
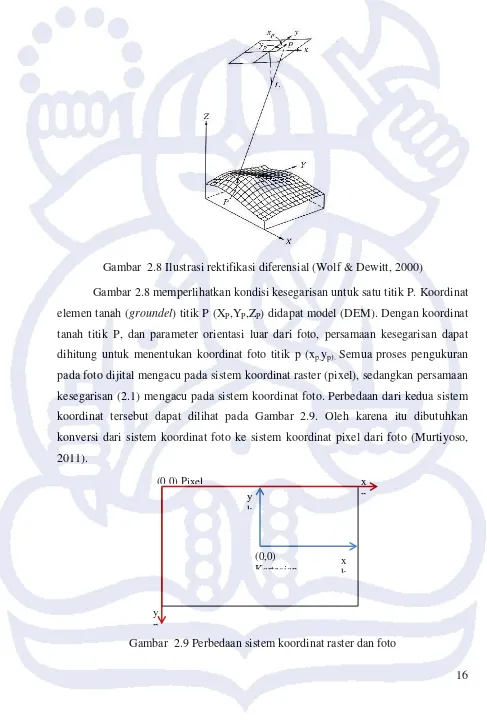
16 Gambar 2.8 Ilustrasi rektifikasi diferensial (Wolf & Dewitt, 2000)
Gambar 2.8 memperlihatkan kondisi kesegarisan untuk satu titik P. Koordinat elemen tanah (groundel) titik P (XP,YP,ZP) didapat model (DEM). Dengan koordinat tanah titik P, dan parameter orientasi luar dari foto, persamaan kesegarisan dapat dihitung untuk menentukan koordinat foto titik p (xp,yp). Semua proses pengukuran pada foto dijital mengacu pada sistem koordinat raster (pixel), sedangkan persamaan kesegarisan (2.1) mengacu pada sistem koordinat foto. Perbedaan dari kedua sistem koordinat tersebut dapat dilihat pada Gambar 2.9. Oleh karena itu dibutuhkan konversi dari sistem koordinat foto ke sistem koordinat pixel dari foto (Murtiyoso, 2011).
Gambar 2.9 Perbedaan sistem koordinat raster dan foto (0,0)
Kartesian
(0,0) Pixel x
p
y p
y k
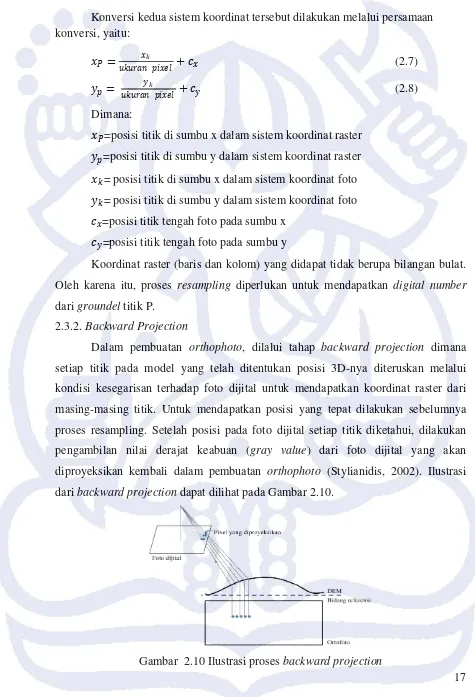
17 Konversi kedua sistem koordinat tersebut dilakukan melalui persamaan konversi, yaitu:
𝑥𝑃 =𝑢𝑘𝑢𝑟𝑎𝑛𝑥𝑘𝑝𝑖𝑥𝑒𝑙 +𝑐𝑥 (2.7)
𝑦𝑝 = 𝑢𝑘𝑢𝑟𝑎𝑛𝑦𝑘𝑝𝑖𝑥𝑒𝑙 +𝑐𝑦 (2.8)
Dimana:
𝑥𝑃=posisi titik di sumbu x dalam sistem koordinat raster 𝑦𝑝=posisi titik di sumbu y dalam sistem koordinat raster 𝑥𝑘= posisi titik di sumbu x dalam sistem koordinat foto 𝑦𝑘= posisi titik di sumbu y dalam sistem koordinat foto 𝑐𝑥=posisi titik tengah foto pada sumbu x
𝑐𝑦=posisi titik tengah foto pada sumbu y
Koordinat raster (baris dan kolom) yang didapat tidak berupa bilangan bulat. Oleh karena itu, proses resampling diperlukan untuk mendapatkan digital number
dari groundel titik P. 2.3.2. Backward Projection
Dalam pembuatan orthophoto, dilalui tahap backward projection dimana setiap titik pada model yang telah ditentukan posisi 3D-nya diteruskan melalui kondisi kesegarisan terhadap foto dijital untuk mendapatkan koordinat raster dari masing-masing titik. Untuk mendapatkan posisi yang tepat dilakukan sebelumnya proses resampling. Setelah posisi pada foto dijital setiap titik diketahui, dilakukan pengambilan nilai derajat keabuan (gray value) dari foto dijital yang akan diproyeksikan kembali dalam pembuatan orthophoto (Stylianidis, 2002). Ilustrasi dari backward projection dapat dilihat pada Gambar 2.10.
18 2.3.3. Forward Projection
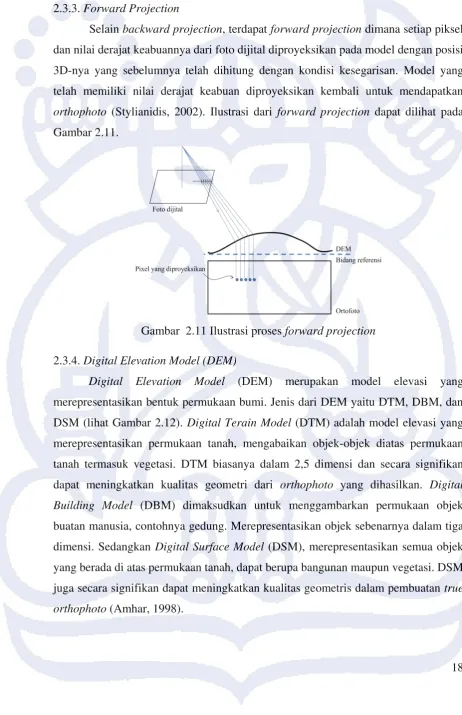
Selain backward projection, terdapat forward projection dimana setiap piksel dan nilai derajat keabuannya dari foto dijital diproyeksikan pada model dengan posisi 3D-nya yang sebelumnya telah dihitung dengan kondisi kesegarisan. Model yang telah memiliki nilai derajat keabuan diproyeksikan kembali untuk mendapatkan
orthophoto (Stylianidis, 2002). Ilustrasi dari forward projection dapat dilihat pada Gambar 2.11.
Gambar 2.11 Ilustrasi proses forward projection
2.3.4. Digital Elevation Model (DEM)
19 Gambar 2.12 Ilustrasi perbedaan DSM dan DTM
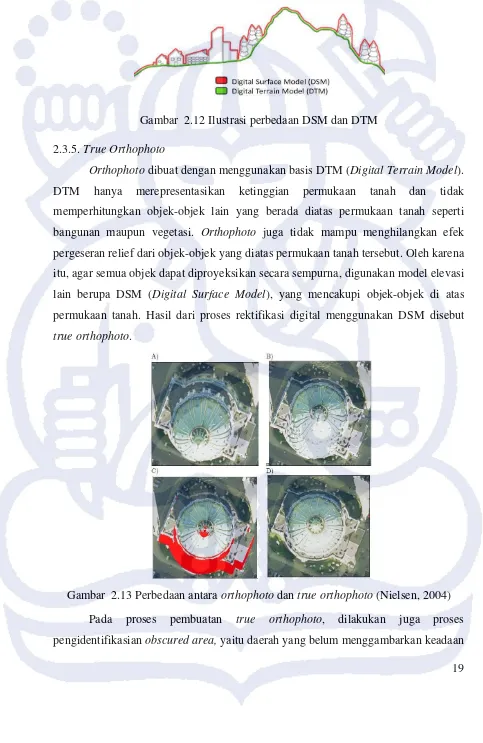
2.3.5. True Orthophoto
Orthophoto dibuat dengan menggunakan basis DTM (Digital Terrain Model). DTM hanya merepresentasikan ketinggian permukaan tanah dan tidak memperhitungkan objek-objek lain yang berada diatas permukaan tanah seperti bangunan maupun vegetasi. Orthophoto juga tidak mampu menghilangkan efek pergeseran relief dari objek-objek yang diatas permukaan tanah tersebut. Oleh karena itu, agar semua objek dapat diproyeksikan secara sempurna, digunakan model elevasi lain berupa DSM (Digital Surface Model), yang mencakupi objek-objek di atas permukaan tanah. Hasil dari proses rektifikasi digital menggunakan DSM disebut
true orthophoto.