Volume 8 No 2, Agustus 2017
JURNAL IT
Prototype Sistem Kontrol Untuk Implementasi Parkir Otomatis
Kendaraan Roda Empat
Ahmad Martani1, Andani Achmad2, Dewiani3 1Universitas Islam Makassar
2,3Teknik Elektro Universitas Hasanuddin
1[email protected], 2[email protected], 3[email protected]
Abstrak
Prototipe Sistem Kontrol Untuk Implementasi Parkir Otomatis Kendaraan Roda Empat adalah penelitian yang dilatarbelakangi permasalahan umum pengguna kendaraan ketika akan memarkirkan kendaraannya. Tujuan dari penelitian ini adalah memudahkan pengguna parkir, khususnya kendaraan roda empat yang ingin memarkirkan kendaraannya pada area parkir pada 3 jenis parkir yang berbeda. Metode yang digunakan adalah dengan menggunakan simulasi dalam bentuk prototipe kendaraan mobil. Algortima yang digunakan
adalah algoritma dead Reckoning, yakni dengan memperkirakan pergerakan prototipe kendaraan mobil dalam
mengisi 3 jenis parkir yang berbeda, yakni parkir lurus, serong dan pararel. Switch Button merupakan perangkat input untuk menentukan tipe jenis parkir yang akan digunakan. arduino uno adalah mikroprosesor tunggal yang digunakan pada sistem ini. Untuk sistem keamanan dalam menghindari tabrakan, sistem ini
menggunakan sensor ultrasonic pada bagian depan dan belakang.
Hasil dari penelitian ini adalah prototipe kendaraan mampu menempati posisi ruas parkir yang kosong pada 3
jenis parkir yang berbeda dengan aman. Sensor ultrasonic juga dinilai mampu mendeteksi ada tidak adanya
objek yang menghalangi pada jarak yang telah ditentukan.
Kata Kunci : Parkir, Arduino Uno, Sensor Ultrasonic, Dead Reckoning
Abstract
Control System Prototypes For Automated Parking Implementation Four Wheel Vehicles are a study of the underlying problems of vehicle users when parking their vehicles. The purpose of this study is to facilitate parking users, especially four-wheeled vehicles who want to park their vehicles in the parking a rea on 3 different types of parking. The method used is to use the simulation in the form of a prototype of a car vehicle. Algortima used is the dead reckoning algorithm, which is to estimate the movement of prototype of car vehicles in filling 3 different types of parking, ie parking straight, oblique and parallel. Switch Button is an input device to determine the type of parking that will be used. a rduino uno is the single microprocessor used on this system. For security systems in avoiding collisions, these systems use ultr asonic sensors on the front and rear.
The result of this research is prototype of vehicle able to occupy vacant parking area position on 3 different type of parking safely. Ultrasonic sensors a re also considered capable of detecting the absence of objects that block at a predetermined distance.
Volume 8 No 2, Agustus 2017
JURNAL IT
1. Pendahuluan
Alat transportasi merupakan suatu kebutuhan pokok bagi masyarakat dari berbagai kalangan. Salah satunya kebutuhan teknologi dalam bidang transportasi yaitu keamanan dan kenyamanan sistem parkir kendaraan khusus. Sistem parkir yang dimaksud adalah bagi pengguna kendaraan yang ditempatkan pada tempat tertentu, contohnya sistem parkir di perkantoran atau instansi tertentu. Saat ini banyak dikembangkan sistem manajemen ruang parkir mobil yang tersedia yang berarti driver mobil dapat mengetahui apakah ruang parkir mobil tersedia di tempat parkir atau tidak tanpa masuk ke parkir banyak dengan mengamati ruang parkir [1].
Peningkatan produksi kendaraan roda empat sangat pesat berdampak pada kepadatan lalu lintas, hal ini berdampak lahan parkir untuk kendaraan yang semakin sempit terutama dipusat keramaian seperti pasar, superma rket dan sebagainya [2]. Dengan meningkatnya produksi kendaraan dan populasi dunia, lebih banyak parkir ruang dan fasilitas yang diperlukan. Sebuah sistem parkir baru bernama Smart Parking System (SPS) diusulkan untuk membantu pengemudi menemukan ruang kosong di tempat parkir dalam waktu yang lebih singkat[3].
Masalah utama yang sering terjadi adalah sulitnya memarkirkan kendaraan beroda empat pada area parkir yang disediakan. Terkadang membutuhkan waktu lebih untuk memarkirkan kendaraan, apalagi jika si pengendara tidak terlalu mahir dalam memarkirkan kendaraannya, ditambah lagi jika kondisi area parkir tersebut dalam kondisi padat dan memiliki area yang sempit. Tabrakan dapat terjadi selama membalikkan atau parkir mobil terutama di ruang terbatas. Karena banyak driver mengakui bahwa parkir paralel adalah tugas yang sangat membosankan [4]. Pengembangan sistem parkir pintar untuk mengurangi kekacauan parkir bertujuan penghapusan dari masalah parkir yang dihadapi di dunia sekarang menggunakan microcontroller 8051 dan sebuah metal detektor merasakan kehadiran kendaraan yang diparkir dalam batasan zona parkir[5]. Accident detection dan smart vehicle telah banyak diteliti oleh peneliti-peneliti sebelumnya seperti pemasangan tiga sensor ultrasonik dipasang di sudut kiri depan mobil untuk mendapatkan informasi lingkungan parkir dan sensor kompas dipasang di posisi tengah mobil untuk mengukur postur mobil [6]. Dengan menggunakan sensor ultrasonic untuk mendeteksi ada tidak adanya objek di depan sensor, jika terdapat objek yang melebihi batas aman, maka akan menampilkan teks bahaya pada LCD dan buzzer akan berbunyi. Sensor yang digunakan berjumlah 2 buah yang diletakkan pada depan dan bagian belakang kendaraan[7]. Penggunaan saklar yang akan mengaktifkan sistem autodetect ca r parking slot, dimana nantinya kendaraan akan dapat menemukan dengan sendirinya ruang parkir yang kosong, selanjutnya jika kendaraan telah menemukan ruas parkir yang kosong maka akan dilakukan mekanisme yang disebut dengan Advanced Parking Guidance System (APGS)[8]. Pada berbagai teknik parkir cerdas yang dikembangkan untuk mengatasi masalah tersebut dengan menggunakan berbagai jaringan sensor nirkabel dan memberikan analisis data real-time dari sensor[9].
Salah satu pengembangan penelitian ini adalah dengan metode algoritma dead reckoning dan
penggunaan arduino uno R3 serta sensor ultrasonic untuk mengontrol prototype kendaraan roda empat dalam
melalukan tiga kondisi parkir yaitu parkir lurus, serong dan paralel.
2. Tinjauan Pustaka 2.1. Defenisi Parking/Parkir
Menurut Departemen Perhubungan Direktur Jenderal Perhubungan Darat [10], parkir adalah keadaan tidak bergerak suatu kendaraan yang tidak bersifat sementara.
2.2. Jenis Parkir Kendaraan
a. Parkir Paralel
Parkir sejajar dimana parkir diatur dalam sebuah baris, dengan bumper depan mobil menghadap salah satu bumper belakang yang berdekatan.
b. Parkir Serong
Salah satu cara parkir yang banyak digunakan dipinggir jalan ataupun di pelataran maupun gedung parkir adalah parkir serong yang memudahkan kendaraan masuk ataupun keluar dari ruang parkir.
c. Parkir Tegak Lurus
Dengan cara ini mobil diparkir tegak lurus, berdampingan, menghadap tegak lurus ke lorong/gang, trotoar, atau dinding. Jenis mobil ini parkir lebih terukur daripada parkir paralel dan karena itu biasanya digunakan di tempat di pelataran parkir parkir atau gedung parkir[11].
2.3. Defenisi Sensor Ultrasonic
Volume 8 No 2, Agustus 2017
JURNAL IT
Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik). Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi ultrasonik bisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa. [12]
Gambar 1. Cara Kerja Sensor Ultrasonic
2.4. Arduino Uno Rev 3
Arduino UNO merupakan rangkaian mikrokontroller yang telah terintegrasi dengan fungsi tambahan lainnya, seperti tombol reset, pengendali rentang nilai dari suatu sensor dan fungsi-fungsi penting lainnya. Hal ini menjadikan Arduino UNO itu sendiri menjadi mikrokontroller yang banyak digunakan oleh para pengguna komponen mikrokotroller itu sendiri, itu dikarenakan penggunaan Arduino UNO yang sangat praktis dan membantu bagi mereka yang awam tentang mikrokontroller.
Gambar 2. Arduino uno rev. 3
Arduino UNO mempunyai karakteristik sebagai berikut : Operating Voltage 5V dapat mengantarkan arus hingga 2A. Namun, dalam penggunaannya, H-Bridge driver motor DC L298 dapat digunakan secara paralel, sehingga kemampuan menghantarkan dari H-Bridge driver motor DC L298 arusnya menjadi 4A. Konsekuensi dari pemasangan H-Bridge driver motor DC L298 dengan mode paralel maka, kamu perlu 2 buah H-Bridge driver motor DC L298 untuk mengendalikan 2 motor DC menggunakan H-Bridge driver motor DC L298 pada mode paralel.
Volume 8 No 2, Agustus 2017
JURNAL IT
Gambar 3. Penampang IC L298
2.6. Motor DC
Motor DC adalah suatu mesin yang berfungsi untuk mengubah energi listik arus searah menjadi energi gerak atau energi mekanik. Motor yang paling sederhana untuk pengaktifannya. Motor DC terdiri dari dua bagian utama, yaitu rotor dan stator. Rotor adalah bagian yang berputar atau armature, berupa koil dimana arus listrik dapat mengalir. Stator adalah bagian yang tetap dan menghasilkan medan magnet dari koilnya.
Prinsip kerja motor DC adalah jika kumparan dialiri arus listrik maka pada kedua kumparan akan bekerja gaya Lorentz. Pada gambar 2.5 dapat dilihat prinsip kerja gaya Lorentz, dimana gaya yang jatuh pada telapak tangan (F), jari yang direntangkan menunjukan arah medan magnet (B), ibu jari menunjukkan arah arus listrik(I). [13]
Gambar 4. Arah perputaran motor DC
3. Metodologi Penelitian
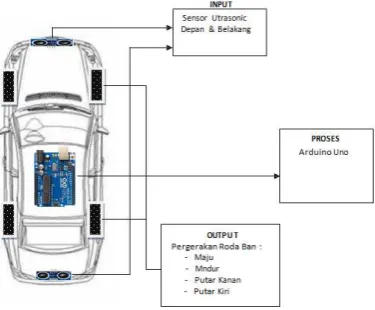
Penelitian ini fokus dalam merancang dan membangun mode sistem prototype untuk parkir kendaraan otomatis. Masukan dari input berupa sensor ultrasonic yang akan dikelola oleh sistem mikrokontroller dimana dalam hal ini adalah berupa arduino uno R3 yang kemudian akan langsung dihubungkan ke piranti keluaran berupa akselerasi roda serta rem roda. Akselerasi roda yang dimaksudkan disini adalah pergerakan roda secara keseluruhan seperti maju, mundur, belok kanan maupun belok kiri.
Gambar 5. Skema Sistem
Volume 8 No 2, Agustus 2017
JURNAL IT
Gambar 6. Mekanisasi mobil belok kiri dan kanan
3.1 Algoritma Dead Reckoning
Algoritma Dead Reckoning adalah sebuah proses dalam memperkirakan posisi berdasarkan posisi sebelumnya yang telah diketahui kecepatan, waktu dan jarak yang telah diketahui. Pada penelitian yang akan dibuat nanti, algoritma dalam menentukan pergerakan mobil untuk 3 jenis parkir adalah algortima dead reckoning. penggunaan metode ini pada penelitian yang akan dilakukan adalah melakukan perkiraan pergerakan kendaraan mobil pada 3 jenis parkir yang berbeda dengan cara melakukan analisa terhadap posisi-posisi kendaraan pada 3 jenis parkir yang telah disediakan. Tentu saja meskipun kendaraan prototipe mobil yang digunakan adalah jenis perputaran tetapi akan tetap mengacu kepada pergerakan mobil yang sebenarnya.
3.2. Pergerakan Derajat Prototype Mobil Berdasarkan Algortima Dead Reckoning
Gambar 7. Mekanisme Pergerakan Kendaraan Pada Parkir Jenis Paralel
Pergerakan prototype kendaraan mobil adalah hasil yang tidak dapat dipisahkan dari penelitian pada sistem ini. pergerakan kendaraan prototipe kendaraan mobil dapat dilihat pada gambar 7 di atas. Untuk parkir pararel, mobil akan bergerak ke depan sejauh 18 cm, kemudian akan dilanjutkan dengan perputaran kendaraan sebesar 90°. Karena jenis prototype mobil yang digunakan adalah mobil jenis perputaran. Terakhir Setelah itu mobil akan mundur ke belakang sejauh 20 cm.
Volume 8 No 2, Agustus 2017
JURNAL IT
Gambar 8 di atas menunjukkan mekanisme pergerakan mobil untuk parkir jenis serong. Pergerakan kendaraan mobil akan didahului dengan pergerakan maju kendaraan sejauh 32 cm, selanjutnya kendaraan akan berputar sebanyak 45° ke sebelah kiri, kemudian pergerakan terakhir mobil akan bergerak ke belakang sejauh 24 cm.
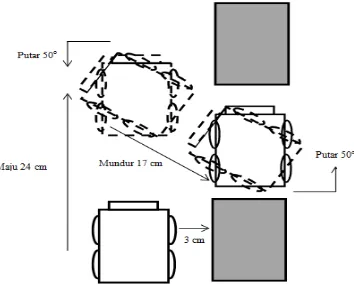
Gambar 9. Mekanisme Pergerakan Kendaraan Pada Parkir Jenis Lurus
Mekanisme pergerakan selanjutnya adalah mekanisme pergerakan kendaraan pada parkir jenis lurus. Parkir jenis ini merupakan jenis parkir yang dinilai mempunyai tingkatan kesulitan yang tinggi jika dibandingkan dengan jenis-jenis parkir lainnya. Hal ini dikarenakan pergerakan mobil yang lebih banyak dibanding dengan pergerakan mobil pada kondisi parkir lainnya. Pergerakan kendaraan pada parkir lurus
akan diawali dengan pergerakan ma maju kendaraan sejauh 24 cm. Kemudian kendaraan akan berputar 50°
ke kiri. Selanjutnya kendaraan akan bergerak ke belakang sejauh 17 cm, terkahir mobil akan berputar ke kanan sebanyak 50°.
3.2. Skala Perbandingan Jarak Antara Mobil
Gambar 10. Aturan Standar Dimensi Kendaraan Penumpang
Dalam penentuan skala perbandingan ukuran mobil dan jarak antar mobil, yang harus diperhatikan pada penelitian ini adalah ukuran satuan dimensi mobil penumpang berbeda dimensi dengan model mobil prototipe yang digunakan. Ukuran dimensi standar untuk mobil penumpang adalah 170x470 cm yang jika digambarkan ke dalam bangun kotak, akan membentuk persegi panjang. Berbeda dengan ukuran dimensi prototipe mobil yang mempunyai ukuran, 13x17 cm, yang jika digambarkan ke dalam bangun kotak tidak membentuk persegi secara sempurna. Maka untuk menyamakan dimensi untuk pembuatan skala, maka panjang total kendaraan prototipe ditambah sepanjang 19 cm, sehingga panjang total prototipe kendaraan mobil adalah 17+19=36cm. Jadi jika diskalakan dalam perbandingan ukuran maka skala yang digunakan adalah 1:13 (satu banding tiga belas).
Tabel 1. Penetuan Satuan Ruang Parkir (SRP)
Jenis Kendaraan Satuan Ruang Parkir (m2)
Mobil Penumpang Gol.I 2.30 x 5.00
Mobil Penumpang Gol.II 2.50 x 5.00
Volume 8 No 2, Agustus 2017
JURNAL IT
Berdasarkan data-data diatas, maka penentuan skala perbandingan jarak antar mobil dapat dijabarkan pada tabel 2 di bawah ini.
Tabel 2. Skala Perbandingan Satuan Ruang Parkir (SRP)
No Gol. SRP (m2) SRP
Prototipe(cm2) Skala.
1 1 2,30 x 5,00 17,5x38 1:13
2 2 2,50 x 5,00 19x38 1:13
3 3 3,00 x 5,00 23x38 1:13
4. Hasil Penelitian
Sensor Ultrasonic pada penelitian ini menjadi satu-satunya perangkat input sensor yang dihubungkan langsung ke pemproses arduino. Dalam penelitian yang dilakukan sensor ultrasonic yang digunakan berjumlah 2 buah sensor, dimana otomatis akan menggunakan 2 pin input dan 1 pin ground serta pin Vcc 5v pada arduino uno. Penempatan sensor diposisikan pada bagian belakang dan bagian depan mobil. Untuk lebih jelas dapat dilihat pada gambar 11 di bawah ini.
Gambar 11. Posisi sensor ultrasonic pada mobil
Penggunaan jumlah sensor ultrasonic berbeda dengan rancangan penelitian awal yakni 4 buah sensor
yang akan ditempatkan pada bagian depan, belakang dan samping kiri kanan mobil. Hal ini dikarenakan ketika penelitian dilakukan, penggunaan sensor samping kiri dan kanan tidak terlalu dibutuhkan oleh sistem. Karena pada dasarnya, keamanan kendaraan mobil ketika diparkirkan, posisi depan dan belakang yang menjadi permasalahan utama.
Gambar 12. Skematik sensor pada arduino
Volume 8 No 2, Agustus 2017
JURNAL IT
4.1. Percobaan Waktu Eksekusi Parkir Kendaraan Mobil
Percobaan waktu eksekusi parkir kendaraan untuk tiap-tiap tipe parkir.
Tabel 3. Eksekusi waktu parkir kendaraan mobil
Percobaan Hasil (Detik)
Ke P. Pararel P. Serong P. Lurus
1 1 2,2 3,5 4,6
2 2 2,1 3,4 4,5
3 3 2,1 3,4 4,5
4 4 2,2 3,3 4,6
5 5 2,3 3,5 4,4
Gambar 13. Grafik Percobaan Waktu Eksekusi Parkir Kendaraan Mobil
4.2. Percobaan Jarak Antara Mobil
Percobaan jarak antara mobil disini adalah jarak antara mobil yang terparkir (kiri dan kanan) dengan mobil yang telah diparkirkan. Penelitian ini bertujuan untuk mengukur tingkat konsistensi keakuratan mekanisme parkir yang telah diprogramkan di dalam mikrokontroller arduino. Mekanisme percobaan yang dilakukan adalah dengan memarkirkan mobil prototype pada 3 jenis parkir yang telah disediakan.
Tabel 4. Percobaan jarak antara mobil
5. Kesimpulan
Berdasarkan penelitian dan percobaan maka dapat ditarik kesimpulan bahwa:
1. Kendaraan mobil berupa prototipe yang digunakan mampu terparkir secara otomatis dengan baik tanpa
mengalami tabrakan pada mobil lain dan juga objek yang menghalangi mobil selama proses parkir pada 3 jenis tipe parkir yang berbeda.
2. Tipe prototipe mobil yang digunakan merupakan mobil prototipe jenis mobil perputaran 360 derajat.
3. Eksekusi waktu yang paling cepat 2,1 detik dan lama 2,3 detik parkir paralel, parkir serong paling cepat 3.3 detik dan lama 3,5 detik serta parkir lurus paling cepat 4.4 detik dan lama 4.6 detik.
4. Jarak antara mobil yang diparkirkan dan mobil yang berada disamping kanan jarak rata sebesar 5,34 cm
Volume 8 No 2, Agustus 2017
JURNAL IT
nilai rata-rata sebesar 2,58 cm dan 2,88 cm. Untuk parkir tipe lurus, rata-rata untuk mobil sebelah kanan adalah sebesar 4,5 cm dan mobil sebelah kiri adalah sebesar 4,64 cm.
5. Jika PWM diset di bawah 200 PWM, pergerakan perutaran mobil tidak terlalu maksimal.
Referensi
[1] Satish V. Reve dan Sonal Choudri, “Mana gement of Car Parking System Using Wireless Sensor Network”, Jurnal IJETAE, India, 2015
[2] Heldi Yenni dan Ami Patria, “Reka yasa Parking Assistance System Kendaraan dengan Sensor
Ultrasonic”, Teknik Informatika STMIK AMIK, Riau, 2013
[3] Muhammad Faiz Bin Wahab, DKK, “Development Of Automated Parallel Pa rking System In Sma ll
Mobile Vehicle”, Universitas Teknologi Malaysia Petra, Malaysia, 2015
[4] Amin Kianpisheh, Norlia Mustaffa, Pakapan Limtrairut dan Pantea Keikhosrokiani “Smart Parking
System (SPS) Architecture Using Ultra sonic Detector”. Universiti Sains Malaysia(USM), Malaysia, 2012
[5] Swapnil Singh, Utkarsh Singh Sengar dan Mr Rahul Mishra “Development of Smart Parking System
for Reducing Parking Chaos” Department of Electrical and Electronics, Galgotia College of Engineering and Technology, India, 2015
[6] Zhi-Long Wang dan Chih-Hsiung Yang, “The Design of An Autonomous Pa ralel Parking Neuro-Fuzzy Controller for A Car-Like Mobile Robot”, Department of Electrical Engineering National of Kaohsiung University of Applied Sciences, Taiwan, 2010
[7] Faizal Sulmi, “Rancang Bangun Alat Pendeteksi Kecelakaan Jara k Aman Pada Kendaraan Berba sis
Arduino”, Teknik Elektro Universitas Mercu Buana, Jakarta
[8] Aswathy Natesh dan Sudhi Sudarman, “An Intelligent Approach in Parking System for Car Parking
Guidance and Damage Notification based on GPS”, Department of Electronics and Communication Engineering Sree Buddha College of Engineering fo Women, India, 2015.
[9] Faiz Shaikh, Nikhilkumar B.S., Omkar Kulkarni dan Pratik Jadhav “A Survey on “Smart Parking”
System”, Dept. of Computer Engineering, JSCOE, Hadapsar, Pune, India, 2015
[10] Pedoman Teknis Penyelenggara Fa silitas Pa rkir, Departemen Perhubungan Direktur Jenderal Perhubungan Darat, Jakarta, Indonesia, 1996, hal. 1
[11] https://sarangtutorial.wordpress.com/2014/05/16/tutorial-parkir-mobil-part-1-parkir-seri/, akses 08 Maret 2017
[12] www.elangsakti.com/2015/05/sensor-ultrasonik.html, akses 06 Maret 2017
[13] Rahmansyah, M. Febri, “Prototipe Robot Line Follower Penganta r Makanan