PENGARUH PERUBAHAN KONSTANTA PID PADA SISTEM
KONTROL HYBRID FUZZY – PID PADA PLANT ORDE DUA
SECARA UMUM
LAPORAN TUGAS AKHIR
Oleh : Nama : Joko Purboyo NIM : L2F 097 650
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS DIPONEGORO
SEMARANG 2002
HALAMAN PENGESAHAN
Dengan ini menerangkan bahwa Tugas Akhir dengan judul “Pengaruh Perubahan Konstanta PID Pada Sistem Kontrol Hybrid Fuzzy – PID Pada Plant
Orde Dua Secara Umum” yang disusun oleh :
Nama : Joko Purboyo
NIM : L2F 097 650
Telah disetujui dan disahkan oleh dosen pembimbing Tugas Akhir pada :
Tanggal : ………... Tempat : Semarang oleh : Pembimbing I Ir. Sudjadi, MT NIP 131 558 567 Pembimbing II Aris Triwiyatno, ST NIP 132 230 559 Mengetahui,
Ketua Jurusan Teknik Elektro
Fakultas Teknik Universitas Diponegoro Semarang
DR. Ir. Hermawan, DEA NIP 131 598 857
Abstract
Control system has an important rule in science, technology and industry. Many researches that dedicated/purposed for innovation and development of control system are being done to comply with a request of control system that is growing complex. In industrial process, PID controller had been well known as a responsive, efficient and cheap control system. This system is still widely used in industrial while many innovation of sophisticated control system are developed.Fuzzy Logic Controller, which firstly introduced in decade of 1960, is a non conventional control system. The usage of linguistic variable that is close to human language as a substituent of mathematic variables makes this system unique. It is understood because in reality there are many problems that cannot be solved mathematically.
This final project observe the effect of changing of PID parameters to hybrid system of Fuzzy – PID toward time respond system for 2nd order plant that use several 2nd order plant sample which represent under damping plant, critical damping plant and over damping plant commonly, with the aim is to get better time respond of the system that both of control system are able to complete the superiority and to cover the lack of each other. The result of this new system will be compare with the respond of FLC system and PID control system so it will be known that the new system is better or worse.
The result shows that the additional of particular KP, KI and KD constantans will improve system
respond that reaches quicker time delay (td), rise time (tr), peak time (tp), settling time (ts), and smaller
Abstrak
Sistem pengendali (control system) memegang peranan penting bagi kelangsungan ilmu pengetahuan, teknologi maupun industri. Riset-riset yang ditujukan untuk inovasi dan pemgembangan sistem kontrol yang telah ada terus dilakukan untuk menjawab kebutuhan akan sistem kontrol yang semakin kompleks. PID Controller merupakan salah satu sistem yang dikenal luas dalam dunia industri sebagai sistem kontrol yang responsif, efesien dan murah. Sistem ini masih banyak digunakan secara luas oleh kalangan industri ditengah maraknya penemuan sistem kontrol lain yang lebih cangih. Fuzzy Logic Controller merupakan sistem kontrol non-konvensional yang mulai dikenalkan pada pertengahan dekade 1960-an. Keunikan sistem ini adalah digunakannya variabel linguistik yang merupakan pendekatan terhadap “bahasa manusia” sebagai penganti variabel matematis. Hal ini dimengerti karena dalam kenyataan yang ada, banyak permasalahan yang tidak dapat dirumuskan secara matematis.
Dalam karya tulis ini akan diteliti pengaruh perubahan konstanta PID pada sistem hibrid (hybrid) PID Controller dan Fuzzy Logic Controller terhadap tanggapan waktu sistem pada plant orde 2 dengan menggunakan beberapa plant sample orde 2 dimana plant sample tersebut mewakili plant under damping,
plant critical damping dan plant over damping secara umum, dengan harapan didapatkan tanggapan waktu sistem yang lebih baik lagi dimana kedua sistem kontrol tersebut mampu saling melengkapi kelebihan dan menutupi kelemahan masing-masing. Simulasi dilakukan dengan menggunakan program bantu MATLAB buatan The MathWork Release 5.3.
Dari hasil yang didapatkan ternyata penambahan konstanta KP, KI dan KD pada nilai tertentu akan
memperbaiki respon sistem yang ditandai dengan semakin singkatnya waktu tunda (td), waktu naik (tr),
waktu puncak (tp), waktu penetapan (ts), semakin kecilnya lonjakan maksimum (Mp) dan offset pada semua
KATA PENGANTAR
Bismillaahirrohmaanirrohiim
Assalamualaikum warahmatullahi wabarokatuh
Puji Syukur penulis panjatkan ke hadirat Allah SWT yang senantiasa melimpahkan rahmat dan hidayah-Nya sehingga laporan Tugas Akhir dengan judul “PENGARUH PERUBAHAN KONSTANTA PID PADA SISTEM KONTROL HYBRID FUZZY – PID PADA PLANT ORDE DUA SECARA UMUM” dapat penulis selesaikan dengan lancar.
Tugas Akhir merupakan salah satu syarat yang harus dipenuhi oleh semua mahasiswa Jurusan Teknik Elektro, Fakultas Teknik, Universitas Diponegoro untuk menyelesaikan proses perkuliahan untuk memperoleh gelar Sarjana Teknik.
Selama melaksanakan Tugas Akhir ini, penulis telah banyak mendapatkan pengalaman yang bermanfaat dan bantuan dari berbagai pihak. Oleh karena itu, penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Ibu dan Ayah tercinta serta adik-adikku tersayang yang telah mendoakan dan memberi dukungan kepada penulis selama ini.
2. Bapak Dr. Ir. Hermawan, DEA, selaku Ketua Jurusan Teknik Elektro Universitas Diponegoro.
3. Bapak Ahmad Hidayatno, ST, MT selaku koordinator Tugas Akhir Jurusan Teknik Elektro Universitas Diponegoro.
4. Bapak Ir. Sudjadi, MT, selaku pembimbing I. 5. Bapak Aris Triwiyatno, ST, selaku pembimbing II.
6. Sahabat-sahabat, Amor, Temon, Darmono, Teguh dan Didik, terima kasih suportnya selama ini.
7. Rekan-rekan seperjuangan di Teknik Elektro.
8. Dan semua pihak yang telah membantu penyusuna laporan Tugas Akhir ini yang tidak dapat penulis sebutkan satu per satu.
Penulis menyadari bahwa laporan Tugas Akhir ini masih jauh dari sempurna. Oleh karena itu, penulis selalu menunggu kritik dan saran yang membangun untuk kesempurnaan karya-karya penulis di masa mendatang.
Wasalamualaikum warahmatullahi wabarokatuh
Semarang, Oktober 2002
DAFTAR ISI Hal Halaman Judul ……….. i Halaman Pengesahan ………. ii Abstrak ……….. iii Kata Pengantar ……….. v
Daftar Isi ……….……... vii
Daftar Gambar ……….. x
Daftar Tabel ..………... xxii
BAB I PENDAHULUAN ……….. 1
1.1 Latar Belakang ……… 1
1.2 Tujuan ……….………. 3
1.3 Pembatasan Masalah ………... 3
1.4 Sistematika Penulisan ……….. 4
BAB II DASAR TEORI ……….……. 6
2.1 Konsep Dasar Sistem Kendali Respon Waktu Dan Pengendali Proportional – Integral – Differential ………….………. 6
2.1.1 Sistem Kendali Loop Terbuka (Open Loop Control System) ... 6
2.1.2 Sistem Kendali Loop Tertutup (Close Loop Control System) .. 7
2.1.3 Kestabilan Mutlak dan Kestabilan Relatif ……….….. 7
2.1.4 Tanggapan Peralihan (Transient Respon) …...………. 8
2.1.5 Tanggapan Waktu Sistem Orde Dua ……….…... 10
2.1.7 Pengendali Proportional Integral dan Differential (PID) .…... 12
2.1.7.1 Proportional Controller ………... 13
2.1.7.2 Intregral Controller ……….…... 15
2.1.7.3 Derivatif Controller ………. 17
2.2 Konsep Dasar Pengendali Logika Fuzzy ……….….. 18
2.2.1 Notasi Himpunan Fuzzy ………... 20
2.2.2 Support set, Crossover point dan Fuzzy Singleton ………….. 21
2.2.3 α - cut Himpunan Fuzzy ………... 22
2.2.4 Fungsi Keanggotaan (Membership Function) ……….. 22
2.2.5 Operasi Himpunan Fuzzy ………... 24
2.2.6 Variabel Linguistik ……… 27
2.2.7 Modifier ………. 27
2.2.8 If – Then Fuzzy Rules ……….…... 28
2.2.9 Struktur Dasar Pengendali Logika Fuzzy ………. 28
a Fuzzifikasi ……….. 29
b Basis Pengetahuan (Knowledge Base) ……….….. 29
c Mekanisme Pertimbangan Fuzzy ………. 30
d Defuzzifikasi ……….…... 33
BAB III PERANCANGAN ….……… 36
3.1 Perancangan Sistem ….……….………. 36
3.1.1 Sinyal Input ……...……….…... 37
3.1.2 Penjumlah ……… 37
3.1.4 Multiplexer ……… 37
3.1.5 Pengendali logika fuzzy (FLC) ……….. 38
a Perancangan Fungsi Keanggotaan ……….…... 38
b Perancangan Aturan Dasar ………. 39
3.1.6 PID Controller ……….………... 44
3.1.7 Plant Simulator ………. 45
3.1.8 Keluaran (Output) ………... 47
3.2 Perancangan Program ……….. 47
3.2.1 MATLAB Command Window ……….. 47
3.2.2 MATLAB Editor/Debugger ………... 48
3.2.3 MATLAB Simulink ………... 49
3.2.4 Fuzzy Interference System (FIS) Editor ………. 50
BAB IV SIMULASI DAN ANALISA ……… 54
4.1 Plant Under Damping dengan ζ = 0,1 dan ωn = 5 …….………. 55
4.2 Plant Under Damping dengan ζ = 0,5 dan ωn = 5 .………. 73
4.3 Plant Under Damping dengan ζ = 0,9 dan ωn = 5 …….………. 93
4.4 Plant Critical Damping dengan ζ = 1 dan ωn = 5 ……….……. 113
4.5 Plant Over Damping dengan ζ = 3 dan ωn = 5 ………... 131
4.6 Plant Over Damping dengan ζ = 5 dan ωn = 5 ………... 149
4.7 Plant Over Damping dengan ζ = 7 dan ωn = 5 ………... 165
BAB V KESIMPULAN DAN SARAN ……….. 184
5.1 Kesimpulan ………. 184
DAFTAR PUSTAKA ………... 187 LAMPIRAN-LAMPIRAN
DAFTAR GAMBAR
Hal
Gambar 2.1 Diagram blok sistem kendali loop terbuka ………. 6
Gambar 2.2 Diagram blok sistem pengendali loop tertutup ……… 7
Gambar 2.3 Kurva tanggapan sistem dengan karakteristik respon
transien ……… 10
Gambar 2.4 Diagram blok PID Controller secara umum ……… 12
Gambar 2.5 Diagram blok PID Controller dengan fungsi alih pada
kawasan frekuensi ……….. 13
Gambar 2.6 Diagram blok system loop tertutup dengan Proportional
Controller ………... 14
Gambar 2.7 Diagram blok sistem loop tertutup dengan Integral
Controller ………... 16
Gambar 2.8 Diagram blok sistem loop tertutup dengan Proportional
Controller ………... 18
Gambar 2.9 Kecepatan mobil sebagai suatu fungsi keanggotaan dengan derajat keanggotaan “cepat”, “sedang” dan
“lambat” ………. 20
Gambar 2.10 Usia sebagai himpunan Fuzzy ……….……… 23
Gambar 2.11 Himpunan Fuzzy yang dinyatakan sebagai fungsi T ….. 24 Gambar 2.12 Fungsi keanggotaan untuk Union (gabungan) dari 2
Gambar 2.13 Fungsi keanggotaan untuk Intersection (irisan) dari 2
himpunan Fuzzy ………. 26
Gambar 2.14 Fungsi keanggotaan himpunan Fuzzy F dan komplemen F 27 Gambar 2.15 Struktur dasar Pengendali logika Fuzzy ……….. 29 Gambar 2.16 Mekanisme pengambilan kesimpulan dengan metode
MAX − MIN ……….. 33
Gambar 2.17 Mekanisme pengambilan kesimpulan dengan metode
MAX − DOT ……….. 33
Gambar 3.1 Diagram blok perancangan sistem kontrol hybrid Fuzzy –
PID ………. 36
Gambar 3.2 Fungsi keanggotan (membership function) yang digunakan
dalam perancangan program ……….. 38
Gambar 3.3 Tampilan FIS Editor MFTA ……… 50
Gambar 3.4 Tampilan Membership Function Editor pada variable
Error MFTA ………... 51
Gambar 3.5 Tampilan Rules Editor pada FIS Editor MFTA ……….. 52
Gambar 3.6 Tampilan Rules Viewer pada FIS Editor MFTA ……… 52
Gambar 3.7 Tampilan Surface Viewer pada FIS Editor MFTA ……. 53 Gambar 4.1 Kurva karakteristik respon sistem pengendali PID pada
plant under damping dengan ζ = 0,1 dan ωn = 5 ………... 55
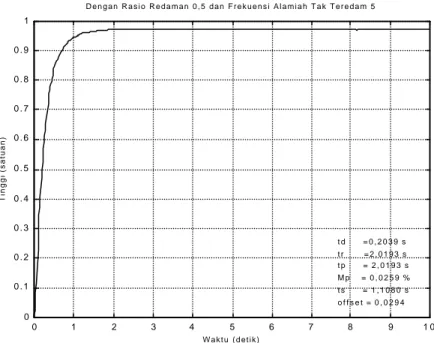
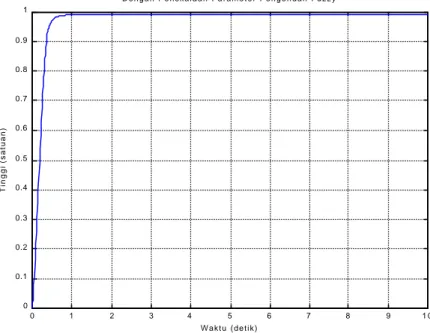
Gambar 4.2 Kurva karakteristik respon sistem pengendali fuzzy pada
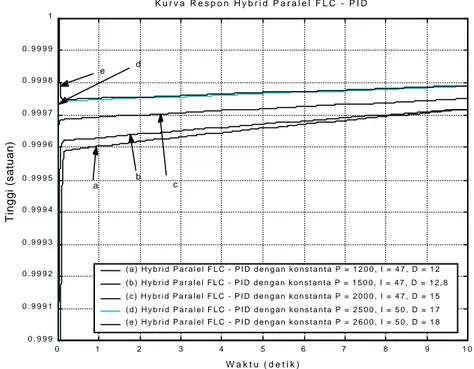
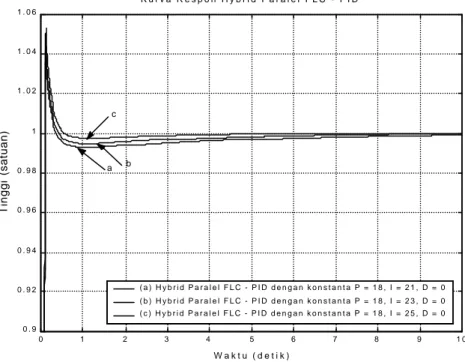
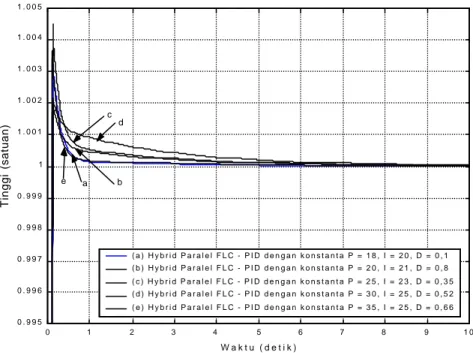
Gambar 4.3 Kurva respon hybrid paralel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ……….. 57
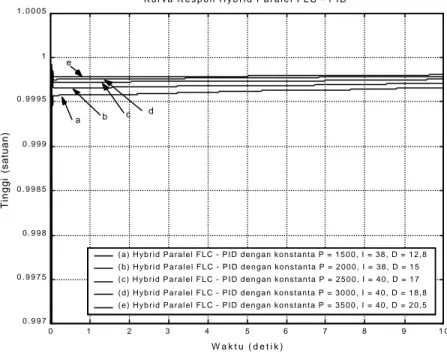
Gambar 4.4 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ……….. 59
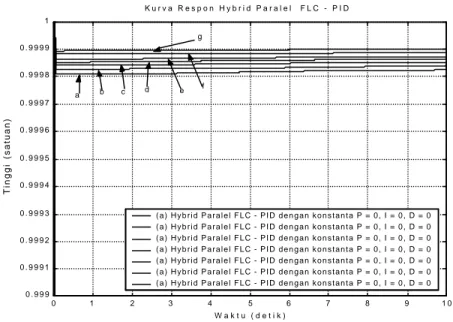
Gambar 4.5 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ……….. 60
Gambar 4.6 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 61
Gambar 4.7 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 62
Gambar 4.8 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 63
Gambar 4.9 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 64
Gambar 4.10 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 66
Gambar 4.11 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 67
Gambar 4.12 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 68
Gambar 4.13 Kurva respon hybrid parallel FLC – PID pada plant under
Gambar 4.14 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 70
Gambar 4.15 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 71
Gambar 4.16 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,1 dan ωn = 5 ………... 72
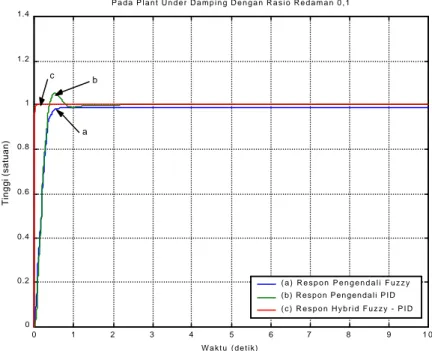
Gambar 4.17 Perbandingan kurva karakteristik respon PID Controller, Fuzzy
Logic Controller dan hybrid FLC – PID ……… 73
Gambar 4.18 Kurva karakteristik respon sistem pengendali PID pada
plant under damping dengan ζ = 0,5 dan ωn = 5 ………... 74
Gambar 4.19 Kurva karakteristik respon sistem pengendali fuzzy pada
plant under damping dengan ζ = 0,5 dan ωn = 5 ………... 75
Gambar 4.20 Kurva karakteristik respon sistem pengendali fuzzy pada
plant under damping dengan ζ = 0,5 dan ωn = 5 ………... 75
Gambar 4.21 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ………... 78
Gambar 4.22 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ………... 79
Gambar 4.23 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 80
Gambar 4.24 Kurva respon hybrid parallel FLC – PID pada plant under
Gambar 4.25 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 82
Gambar 4.26 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 83
Gambar 4.27 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 84
Gambar 4.28 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 85
Gambar 4.29 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 86
Gambar 4.30 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 87
Gambar 4.31 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 88
Gambar 4.32 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 89
Gambar 4.33 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 90
Gambar 4.34 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,5 dan ωn = 5 ……….. 91
Gambar 4.35 Perbandingan kurva karakteristik respon PID Controller, Fuzzy
Gambar 4.36 Kurva karakteristik respon sistem pengendali PID pada
plant under damping dengan ζ = 0,9 dan ωn = 5 ………... 93
Gambar 4.37 Kurva karakteristik respon sistem pengendali fuzzy pada
plant under damping dengan ζ = 0,9 dan ωn = 5 ………... 94
Gambar 4.38 Kurva karakteristik respon sistem pengendali fuzzy pada
plant under damping dengan ζ = 0,9 dan ωn = 5 ………... 95
Gambar 4.39 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ………... 97
Gambar 4.40 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 98
Gambar 4.41 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 100
Gambar 4.42 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 101
Gambar 4.43 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 102
Gambar 4.44 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 102
Gambar 4.45 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 103
Gambar 4.46 Kurva respon hybrid parallel FLC – PID pada plant under
Gambar 4.47 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 106
Gambar 4.48 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 107
Gambar 4.49 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 108
Gambar 4.50 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 109
Gambar 4.51 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 110
Gambar 4.52 Kurva respon hybrid parallel FLC – PID pada plant under
damping dengan ζ = 0,9 dan ωn = 5 ……….. 111
Gambar 4.53 Perbandingan kurva karakteristik respon PID Controller,
Fuzzy Logic Controller dan hybrid FLC – PID …………. 112 Gambar 4.54 Kurva karakteristik respon sistem pengendali PID pada
plant critical damping dengan ζ = 1 dan ωn = 5 ………… 113
Gambar 4.55 Kurva karakteristik respon sistem pengendali fuzzy pada
plant critical damping dengan ζ = 1 dan ωn = 5 ………… 114
Gambar 4.56 Kurva karakteristik respon sistem pengendali fuzzy pada
plant critical damping dengan ζ = 1 dan ωn = 5 ………… 114
Gambar 4.57 Kurva respon hybrid parallel FLC – PID pada plant
Gambar 4.58 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 118
Gambar 4.59 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 119
Gambar 4.60 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 120
Gambar 4.61 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 121
Gambar 4.62 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 122
Gambar 4.63 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 123
Gambar 4.64 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 124
Gambar 4.65 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 125
Gambar 4.66 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 126
Gambar 4.67 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 127
Gambar 4.68 Kurva respon hybrid parallel FLC – PID pada plant
Gambar 4.69 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 129
Gambar 4.70 Kurva respon hybrid parallel FLC – PID pada plant
critical damping dengan ζ = 1 dan ωn = 5 ………. 130
Gambar 4.71 Perbandingan kurva karakteristik respon PID Controller,
Fuzzy Logic Controller dan hybrid FLC – PID …………. 131 Gambar 4.72 Kurva karakteristik respon sistem pengendali PID pada
plant over damping dengan ζ = 3 dan ωn = 5 ……… 132
Gambar 4.73 Kurva karakteristik respon sistem pengendali fuzzy pada
plant over damping dengan ζ = 3 dan ωn = 5 ……… 132
Gambar 4.74 Kurva karakteristik respon sistem pengendali fuzzy pada
plant over damping dengan ζ = 3 dan ωn = 5 ……… 133
Gambar 4.75 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 3 dan ωn = 5 ……….. 135
Gambar 4.76 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 3 dan ωn = 5 ……….. 136
Gambar 4.77 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 3 dan ωn = 5 ……….. 137
Gambar 4.78 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 3 dan ωn = 5 ………. 138
Gambar 4.79 Kurva respon hybrid parallel FLC – PID pada plant over
Gambar 4.80 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 141
Gambar 4.81 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 141
Gambar 4.82 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 143
Gambar 4.83 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 144
Gambar 4.84 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 145
Gambar 4.85 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 146
Gambar 4.86 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 147
Gambar 4.87 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 148
Gambar 4.88 Perbandingan kurva karakteristik respon PID Controller,
Fuzzy Logic Controller dan hybrid FLC – PID …………. 149 Gambar 4.89 Kurva karakteristik respon sistem pengendali PID pada
plant over damping dengan ζ = 5 dan ωn = 5 ……… 150
Gambar 4.90 Kurva karakteristik respon sistem pengendali fuzzy pada
Gambar 4.91 Kurva karakteristik respon sistem pengendali fuzzy pada
plant over damping dengan ζ = 5 dan ωn = 5 ……… 151
Gambar 4.92 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….………. 153
Gambar 4.93 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 154
Gambar 4.94 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 155
Gambar 4.95 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 156
Gambar 4.96 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 157
Gambar 4.97 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 158
Gambar 4.98 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 159
Gambar 4.99 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 160
Gambar 4.100 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 161
Gambar 4.101 Kurva respon hybrid parallel FLC – PID pada plant over
Gambar 4.102 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 163
Gambar 4.103 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 5 dan ωn = 5 ……….. 164
Gambar 4.104 Perbandingan kurva karakteristik respon PID Controller,
Fuzzy Logic Controller dan hybrid FLC – PID …………. 165 Gambar 4.105 Kurva karakteristik respon sistem pengendali PID pada
plant over damping dengan ζ = 7 dan ωn = 5 ……… 165
Gambar 4.106 Kurva karakteristik respon sistem pengendali fuzzy pada
plant over damping dengan ζ = 7 dan ωn = 5 ……… 166
Gambar 4.107 Kurva karakteristik respon sistem pengendali fuzzy pada
plant over damping dengan ζ = 7 dan ωn = 5 ……… 167
Gambar 4.108 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 169
Gambar 4.109 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 170
Gambar 4.110 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 171
Gambar 4.111 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 172
Gambar 4.112 Kurva respon hybrid parallel FLC – PID pada plant over
Gambar 4.113 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 174
Gambar 4.114 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 175
Gambar 4.115 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 176
Gambar 4.116 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 177
Gambar 4.117 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 178
Gambar 4.118 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 179
Gambar 4.119 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 180
Gambar 4.120 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 181
Gambar 4.121 Kurva respon hybrid parallel FLC – PID pada plant over
damping dengan ζ = 7 dan ωn = 5 ……….. 182
Gambar 4.122 Perbandingan kurva karakteristik respon PID Controller,
DAFTAR TABEL
Hal Tabel 3.1 Range fungsi keanggotaan yang digunakan pada
masing-masing plant ……….. 39
Tabel 3.2 Rules base yang digunakan pada perancangan data ……... 44 Tabel 3.3 Konstanta PID yang digunakan pada masing-masing plant 45 Tabel 4.1 Karakteristik respon system hybrid parallel FLC – PID pada
plant under damping ζ = 0,1 dan ωn = 5 ………... 57
Tabel 4.2 Karakteristik respon system hybrid parallel FLC – PID pada
plant under dampingζ = 0,5 dan ωn = 5 ………... 76
Tabel 4.3 Karakteristik respon system hybrid parallel FLC – PID pada
plant under damping dengan ζ = 0,9 dan ωn = 5 ………….. 95
Tabel 4.4 Karakteristik respon system hybrid parallel FLC – PID pada
plant critical damping dengan ζ = 1 dan ωn = 5 …………... 115
Tabel 4.5 Karakteristik respon system hybrid parallel FLC – PID pada
plant over damping dengan ζ = 3 dan ωn = 5 ………... 134 Tabel 4.6 Karakteristik respon system hybrid parallel FLC – PID pada
plant over damping dengan ζ = 5 dan ωn = 5 151
Tabel 4.7 Karakteristik respon system hybrid parallel FLC – PID pada
BAB I PENDAHULUAN
1.1 Latar Belakang
Kontrol automatik telah memegang peranan yang sangat penting dalam perkembangan ilmu dan teknologi maupun industri. Karena kemajuan dalam teori dan praktek kontrol automatik memberikan kemudahan dalam mendapatkan performansi dalam sistem dinamik, mempertinggi kualitas, menurunkan biaya produksi, mempertinggi laju produksi dan sebagainya. Berbagai riset telah dilakukan dan terus dikembangkan untuk memperoleh suatu sistem kontrol yang handal.
PID controller yang merupakan salah satu sistem kontrol konvensional telah
dikenal luas di dunia industri sebagai sistem yang handal untuk plant-plant di berbagai industri yang masih banyak digunakan hingga saat ini. Keunggulan sistem ini antara lain adalah kemampuan untuk mempercepat respon transient menuju ke kondisi yang diinginkan, mengurangi overshoot pada saat peralihan dan mengurangi offset pada keadaan tunak mampu memenuhi kebutuhan dunia industri akan suatu sistem responsif, efesien sekaligus murah.
Fuzzy Logic Controller merupakan sistem kontrol non-konvensional yang mulai dikenalkan pada pertengahan dekade 1960-an. Keunikan sistem ini adalah digunakannya variabel linguistik yang merupakan pendekatan terhadap “bahasa manusia” sebagai penganti variabel matematis. Hal ini dimengerti karena dalam kenyataan yang ada, banyak permasalahan yang tidak dapat dirumuskan secara matematis. Keunggulan lain dari sistem ini adalah kehandalannya pada plant-plant yang mempunyai kompleksitas
yang tinggi. Hal ini menjawab tantangan dari dunia industri dimana sistem yang digunakan semakin kompleks sehingga membutuhkan piranti kontrol yang mampu mengendalikan sistem dengan lebih banyak parameter.
Meskipun perkembangan sistem kontrol sudah sedemikian maju, akan tetapi masih saja diperlukan inovasi-inovasi baru sehingga didapatkan sistem yang lebih baik lagi. Oleh karena itu riset demi riset terus dilakukan dan dikembangkan. Riset yang dilakukan tidak hanya ditujukan untuk menemukan sistem baru, tetapi banyak juga yang melakukan pengembangan dari sistem yang sudah ada atau menggabungkan sistem-sistem yang ada yang masing-masing mempunyai kelebihan dan kekurangan sehingga bisa saling menutupi kelemahan dan melengkapi kelebihan masing-masing sehingga didapatkan hasil yang lebih baik.
Dalam karya tulis ini akan diteliti pengaruh sistem hibrid (hybrid) dari PID
Controller dan Fuzzy Logic Controller terhadap tanggapan waktu sistem pada plant orde
2 dengan menggunakan beberapa plant sample orde 2 dimana plant sample tersebut mewakili plant under damping, plant critical damping dan plant over damping secara
umum. Pada plant sample ini, perubahan dilakukan terhadap rasio redaman (ζ) sedangkan frekuensi alami tak teredam (ωn) dalam keadaan tetap, karena respon sistem yang ditentukan adalah respon sistem terhadap tanggapan waktu bukan terhadap tanggapan
frekuensi, karena pada sistem orde 2 dengan rasio redaman (ζ) sama dan frekuensi alami tak terdam (ωn) berbeda akan memberikan pola overshoot dan osilasi yang sama.
Penelitian ini memanfaatkan aplikasi program bantu MATLAB untuk memasukkan parameter pengendali, sekaligus menampilkan tanggapan sistem hasil pengendaliannya. Hasil yang didapat yang berupa tanggapan waktu sistem terhadap
masukan unit step akan dibandingkan dengan tanggapan sistem dari masing-masing sistem secara individual (tanpa hybrid) sehingga akan diketahui perbandingan kinerjanya.
1.2 Tujuan
Tujuan yang ingin dicapai dalam tugas akhir ini adalah untuk mengetahui sejauh mana pengaruh perubahan konstanta PID terhadap system kontrol hybrid Fuzzy– PID pada plant-plant orde dua secara umum bila dibandingkan dengan penggunaan sistem kontrol fuzzy tunggal dan sistem kontrol PID tunggal (berdiri sendiri, tanpa di-hibrid). Perbandingan kinerja pengaruh perubahan konstanta PID pada system hybrid tersebut dapat dilihat dari waktu tunda (delay time), waktu naik (rise time), waktu puncak (peak
time), waktu penetapan (settling time), lonjakan maksimum (maksimum overshoot),
kesalahan keadaan tunak (offset).
1.3 Pembatasan Masalah
Karena kompleksnya permasalahan dan banyaknya kemungkinan kombinasi percobaan yang dilakukan, maka diperlukan batasan-batasan untuk menyederhanakan permasalahan, yaitu :
1. Plant yang digunakan berupa plant sampel orde dua yang berjumlah 3 buah sampel plant under damping, 1 buah sampel plant critical damping dan 3 buah sampel plant over damping, dimana plant sampel tersebut dianggap mewakili plant sampel sistem orde 2 secara keseluruhan.
2. Analisa dilakukan terhadap respon waktu system dan bersifat matematis. 3. Sinyal masukan yang dipakai adalah unit step.
4. Fungsi keanggotaan dari fuzzy adalah segitiga dan simetris dan basis aturan yang digunakan bersifat linier.
5. Kontroler yang dipakai adalah
• Fuzzy dengan jumlah fungsi keanggotaan (membership function) sebanyak 7
• Pengendali PID
• Hybrid Fuzzy dan PID secara paralel
6. Simulasi hasil perancangan menggunakan program bantu MATLAB.
1.4 Sistematika Penulisan
Laporan tugas akhir ini disusun dengan sistematika sebagai berikut :
BAB I PENDAHULUAN
Pada bab ini dijelaskan latar belakang, tujuan penulisan, pembatasan masalah dan sistematika penulisan dari tugas akhir ini.
BAB II DASAR TEORI
Bab ini berisi penjelasan singkat tentang konsep dasar sistem kendali respon waktu, pengendali Proportional – Integral – Differential (PID) dan pengendali logika fuzzy.
Pada bagian pertama bab ini dijelaskan dasar-dasar system pengaturan respon waktu, analisa respon transient dan keadaan tunak, serta konsep dasar pengendali Proportional, Integral dan Differential (PID Controller).
Sedangkan pada bagian kedua menjelaskan secara singkat dasar-dasar logika Fuzzy yang meliputi notasi dan operasi himpunan Fuzzy, fungsi keanggotaan dan struktur dasar pengendali logika Fuzzy.
BAB III PERANCANGAN
Bab ini memberikan penjelasan tentang perancangan sistem kontrol yang dipakai yang meliputi perancangan plant, perancangan pengendali PID, perancangan pengendali logika fuzzy, dan perancangan program bantu beserta parameter-parameter lain yang digunakan.
BAB IV SIMULASI DAN ANALISA
Bab ini memberikan analisa hasil simulasi dari perancangan yang dilakukan
BAB VI PENUTUP
Dalam bab ini berisi kesimpulan dari hasil tugas akhir dan saran dari hasil penelitian yang telah dilakukan.
BAB II DASAR TEORI
2.1 Konsep Dasar Sistem Kendali Respon Waktu Dan Pengendali Proportional –
Integral – Differential
Sistem pengaturan (Control System) pada dasarnya bertujuan agar sistem yang dikendalikan dapat bekerja sesuai dengan kehendak penggunanya.
Secara umum, berdasarkan ada dan tidaknya pengukuran sinyal keluaran yang dijadikan acuan untuk melakukan aksi kendali terhadap proses, maka sistem kendali dapat dibedakan menjadi dua yaitu sistem kendali loop terbuka dan sistem kendali loop tertutup.
2.1.1 Sistem Kendali Loop Terbuka (Open Loop Control System)
Sistem kendali loop terbuka merupakan sistem kendali dimana keluaran sistem tidak mempunyai pengaruh terhadap aksi kendali. Di sini, keluran yang dihasilkan tidak diukur dan diumpanbalikkan lagi untuk dibandingkan dengan masukan.
Gambar 2.1. Diagram blok sistem kendali loop terbuka
Tiap masukan mempunyai kondisi operasi tetap sehingga ketelitian sistem tergantung pada kalibrasi dan ketelitian komponen-komponen penyusunnya. Jika terdapat gangguan, maka sistem tidak bisa bekerja seperti yang diinginkan. Sistem ini hanya dapat
Masukan
digunakan jika hubungan antara masukan dan keluaran diketahui dan tidak ada gangguan dari dalam maupun luar proses.
2.1.2 Sistem Kendali Loop Tertutup (Close Loop Control System)
Pada sistem kendali loop tertutup, keluaran sistem mempunyai pengaruh langsung terhadap aksi kendali. Keluaran sistem diumpanbalikkan kembali untuk dibandingkan dengan sinyal referensi. Selisih antara sinyal referensi dan sinyal umpan balik ini akan menghasilkan sinyal kesalahan penggerak. Sinyal kesalahan penggerak ini akan diumpankan ke pengendali untuk memperkecil kesalahan dan membuat keluaran mendekati sinyal referensi. Pada sistem kendali loop tertutup, aksi pengendali dipengaruhi oleh sinyal kesalahan penggerak.
Gambar 2.2. Diagram blok sistem pengendali loop tertutup
Sistem kendali jenis ini dipakai untuk sistem-sistem yang dimungkinkan terdapat gangguan yang tidak dapat diramalkan sebelumnya.
Pengendali
Plant
Umpan Balik
Masukan
+
Keluaran
2.1.3 Kestabilan Mutlak dan Kestabilan Relatif
Dalam mendesain sistem kontrol, kita harus mampu meramalkan perilaku dinamik sistem dengan mengetahui komponen-komponen sistem. Karakteristik perilaku dinamik sistem yang paling penting adalah kestabilan mutlak yang mencirikan suatu sistem stabil atau tidak. Sistem kontrol berada dalam keadaan kesetimbangan jika tanpa adanya suatu gangguan atau masukan keluaran berada dalam keadaan tetap dan pada akhirnya akan kembali ke keadaan kesetimbangan jika dikenai gangguan. Sebaliknya, suatu sistem kontrol dikatakan tidak stabil jika keluarannya berosilasi terus-menerus atau keluaran membesar tanpa batas jika sistem tersebut dikenai gangguan.
Sedangkan kestabilan relatif ditunjukkan dengan respon transien sistem kontrol yang sering menunjukkan osilasi teredam sebelum mencapai keadaan tunak. Hal ini dikarenakan sistem kontrol fisik melibatkan penyimpanan energi, sehingga keluaran sistem ketika dikenai masukan tidak dapat mengikuti masukan secara serentak.
2.1.4 Tanggapan Peralihan (Transient Respon)
Dalam beberapa kasus praktis, karakteristik performansi sistem kontrol yang diinginkan dinyatakan dalam bentuk besaran kawasan waktu. Sistem yang mempunyai elemen penyimpan energi tidak dapat merespon secara seketika dan akan menunjukkan respon transien jika dikenai masukan atau gangguan. Karakteristik performansi sistem kontrol ini dinyatakan dalam bentuk respon transien terhadap masukan tangga satuan karena mudah dibangkitkan.
Respon transien sistem kontrol praktis sering menunjukkan osilasi teredam sebelum mencapai keadaan tunak. Dalam menentukan karakteristik respon transien sistem kontrol terhadap masukan tangga satuan, biasanya dicari parameter berikut :
1. Waktu tunda (delay time : td) adalah waktu yang diperlukan respon untuk
mencapai setengah harga akhir yang pertama kali.
2. Waktu naik (rise time : tr) adalah waktu yang diperlukan respon untuk naik dari
10% sampai 90%, 5% sampai 95% atau 0% sampai 100% dari harga akhirnya. Untuk sistem orde dua redaman kurang biasanya digunakan waktu naik 0 – 100%. Untuk redaman lebih biasanya digunakan waktu naik 10 – 90%.
3. Waktu puncak (peak time : tp) adalah waktu yang diperlukan respon untuk
mencapai puncak lewatan yang pertama kali.
4. Lewatan maksimum (maximum overshoot : Mp) adalah persen harga puncak maksimum dari kurva respon yang diukur dari satu. Jika harga keadan tunak tidak sama dengan satu, maka bisanya digunakan persen lewatan maksimum, yang didefinisikan sebagai : % 100 ) ( ) ( ) ( × ∞ ∞ − = c c tp c Mp (2.1)
Besarnya (persen) lewatan maksimum secara langsung menunjukkan kestabilan relatif sistem.
5. Waktu penetapan (settling time : ts) adalah waktu yang diperlukan kurva respon
untuk mencapai dan menetap dalam daerah di sekitar harga akhir yang ukurannya ditentukan dengan presentase mutlak dari harga akhir (biasanya 2% atau 5%). Waktu penetapan iin dikaitkan dengan konstanta waktu terbesar dari sistem
kontrol. Kriteria presentase kesalahan yang digunakan ditentukan dari sasaran desain sistem yang ditanyakan.
Spesifikasi kawasan waktu di atas cukup penting karena sebagian besar sistem kontrol adalah sistem kawasan waktu yang berarti sistem ini harus menunjukkan respon waktu yang dapat diterima.
Gambar 2.3. Kurva tanggapan sistem dengan karakteristik respon transien
2.1.5 Tanggapan Waktu Sistem Orde Dua
Secara umum, persamaan fungsi alih sistem loop tertutup dapat dinyatakan:
2 2 2 2 ) ( ) ( n n n s s s R s C ω ζω ω + + = (2.2) dimana
ωn = frekuensi alamian tak teredam
ζ = rasio redaman sistem
Selanjutnya perilaku dinamik sistem orde dua dapat dijelaskan dalam bentuk parameter
ωn dan ζ.
Tanggapan sistem plant orde dua dengan masukan berupa unit step mempunyai tiga kasus berbeda, yaitu :
1. Kasus redaman kurang (under damping) dengan 0 <ζ< 1 Pada kasus ini fungsi alih loop tertutup dinyatakan oleh persamaan :
(
n d)(
n d)
n j s j s s R s C ω ζω ω ζω ω − + + + = 2 ) ( ) ( (2.3)dimana ωd =ωn 1−ζ2 yang merupakan frekuensi alamiah teredam. Sehingga persamaan keluaran untuk redaman kurang adalah ;
− + − − = − − ζ ζ ω ζ ξω 2 1 2 1 tan sin 1 1 ) (t e t c d nt
(
t≥0)
(2.4) 2. Kasus redaman kritis (critical damping) dengan (ζ = 1)Pada kasus teredam kritis, keluaran sistem mempunyai persamaan sebagai berikut
c(t) = 1 − e-ωnt (1 + ωnt) (t ≥ 0) (2.5)
3. Kasus redaman berlebih (over damping) dengan (ζ > 1)
Pada kasus atas redaman, keluaran sistem mempunyai persamaan sebagai berikut
t n e t c ζ ζ ω − − − − =1 2 1 ) ( t ≥0 (2.6)
Pada sistem orde dua, perbedaan rasio redaman (ζ ) mempengaruhi keluaran sistem yang berupa perbedaan overshoot, osilasi dan stabilitas sistem. Sedangkan untuk sistem orde dua dengan rasio redaman (ζ ) sama dan frekuensi alami tak teredam (ωn)
berbeda, akan memberikan pola overshoot dan osilasi yang sama. Sistem seperti ini dikatakan mempunyai stabilitas yang sama.
2.1.6 Tanggapan Keadaan Tunak
Tanggapan keadaan tunak adalah perilaku respon sistem ketika t mendekati tak terhingga atau saat mencapai keadaan tunak. Jika pada kondisi tunak keluaran sistem tidak tepat sama dengan titik referensi maka dikatakan sistem mempunyai kesalahan keadaan tunak. Kesalahan semacam ini dikenal dengan nama offset.
offset = y( tunak ) −y( ref ) (2.7)
y( tunak ) = tinggi kurva saat mencapai keadaan tunak
y( ref ) = tinggi titik referensi
Kesalahan keadaan tunak ini penting untuk dikaji karena merupakan tolok ukur ketelitian sistem.
2.1.7 Pengendali Proportional Integral dan Differential (PID)
Secara umum, PID controller merupakan gabungan dari 3 macam kontroler, yaitu
Proportional controller, Derivatif controller dan Integral controller. Maksud dari
penggabungan 3 macam kontroler tersebut adalah untuk memperbaiki kinerja sistem dimana masing-masing kontroler mempunyai kelebihan dan kekurangan sehingga penggabungan ketiganya bisa saling menutupi kekurangan dan saling melengkapi dengan kelebihan masing masing. Secara umum, PID controller dapat digambarkan sebagai berikut:
Gambar 2.4 Diagram blok PID Controller secara umum
Rumus umum dari PID controller adalah :
+ + =
∫
dt t de T dt t e T t e k t u d i p ) ( ) ( 1 ) ( ) ( = +∫
+ dt t de K dt t e K t e Kp ( ) i ( ) d ( ) (2.8)Fungsi alih dalam kawasan frekuensi dapat diperoleh dengan menggunakan transformasi Lapace, sehingga diperoleh:
s K s K K s G s E s U d i p + + = = ( ) ) ( ) ( (2.9)
Diagram blok PID controller dengan fungsi alih di atas adalah:
Gambar 2.5 Diagram blok PID Controller dengan fungsi alih pada kawasan frekuensi
Proportional Controller Integral Controller Derivatif Controller e(t) u(t) Plant + _ Kp + Ki/s + Kd s
2.1.7.1 Proportional Controller
Sesuai dengan namanya, keluaran Proportional controller sebanding dengan masukannya dengan konstanta perbandingan tertentu. Proportional controller digunakan untuk memperkuat sinyal kesalahan penggerak dalam sistem kendali loop tertutup sehingga mempercepat keluaran sistem untuk mencapai titik referensi. Persamaan umum sinyal keluaran Proportional controller adalah :
) ( )
(t K et
u = p (2.10)
dimana e(t) adalah sinyal kesalahan penggerak.
Sedangkan fungsi alih dalam kawasan frekuensi adalah :
s K s E s U = ) ( ) ( (2.11)
Implementasi Proportional controller dalam suatu sistem kontrol dengan memisalkan
plant yang dipakai adalah 1 1
+
Ts ditunjukkan pada gambar berikut :
Gambar 2.6 Diagram blok sistem loop tertutup dengan Proportional Controller
Pada keadaan tunak, keluaran sistem dengan pengendali proportional tidak akan sama dengan referensinya. Dengan kata lain pada pengendali proportional masih terdapat offset pada keadaan tunak. Hal ini dapat dibuktikan dengan perhitungan sebagai berikut :
+
_
E(s)
Misalkan suatu sistem dengan pengendali proportional menggunakan plant
1 1
+
Ts , maka persamaan fungsi alihnya adalah sebagai berikut :
p p K Ts K s X s Y s G + + = = 1 ) ( ) ( ) ( (2.12)
Persamaan sinyal kesalahan penggerak E(s) : ) ( ) ( ) (s X s G s E = − = X(s)−G(s)E(s) ( ) 1 1 ) ( 1 ) ( s X K Ts Ts s G s X p + + + = + = (2.13)
misalkan untuk masukan X(s) adalah unit step maka:
s K Ts Ts s E p 1 1 1 ) ( + + + = (2.14)
Offset (kesalahan keadaan tunak) merupakan sinyal error e(t) pada saat t
mendekati tak hingga.
{ ( ) {lim ( ) lim 0 s sE t e offset s t→∞ → = = { s K Ts Ts s p s 1 1 1 lim 0 + + + = → p K + = 1 1 (2.15)
dari persamaan di atas maka jelaslah bahwa untuk sistem dengan pengendali proportional
dengan sinyal masukan berupa unit step pasti terdapat offset.
Offset ini bisa dihilangkan dengan memberikan harga Kp mendekati tak hingga
maksimal tertentu yang jika diberikan suatu harga Kp melebihi batas ini keluaran akan
berosilasi.
2.1.7.2 Intregral Controller
Integral controller digunakan untuk menghilangkan offset pada keadaan tunak.
Offset biasanya terjadi pada plant-plant yang tidak mempunyai faktor integrasi
s
1 .
Persamaan keluaran untuk integral controller adalah :
∫
= t i e t dt k t u 0 ) ( ) ( (2.16)Fungsi alih untuk integral controller pada kawasan frekuensi adalah sebagai berikut : s k s E s U i = ) ( ) ( (2.17)
Implementasi integral controller pada sistem pengaturan loop tertutup ditunjukkan gambar berikut:
Gambar 2.7 Diagram blok sistem loop tertutup dengan Integral Controller
Misalkan pada gambar di atas digunakan plant 1 1
+
Ts , maka persamaan fungsi
alihnya adalah sebagai berikut:
+
_
E(s) X(s) Y(s) 1/(Ts + 1) Ki/si i c K s Ts K s X s Y s G + + = = 2 ) ( ) ( ) ( (2.18)
Persamaan sinyal kesalahan penggerak E(s) :
) ( 1 ) ( ) ( ) ( 2 2 s X K s Ts s Ts s G s X s E i + + + = + = (2.19)
misalkan untuk masukan X(s) adalah unit step maka:
s K s Ts s Ts s E i 1 ) ( 2 2 + + + = (2.20)
Maka offset yang terjadi pada keadaan tunak (t →∞) adalah:
{ ( ) lime t offset t→∞ = { { s K s Ts s Ts s s sE i s s 1 lim ) ( lim 2 2 0 0 + + + = = → → = 0 (2.21)
Jadi terbukti bahwa untuk masukan unit step, Integral controller mampu menghilangkan offset pada keadaan tunak.
2.1.7.3 Derivatif Controller
Derivatif controller dapat juga disebut sebagai pengendali laju. Karena keluaran
pengendali sebanding dengan laju perubahan sinyal kesalahan penggerak. Persamaan keluaran untuk Derivatif controller adalah:
dt t de K t u( )= d ( ) (2.22)
Fungsi alih dalam kawasan frekuensi dapat diperoleh dengan menggunakan transformasi Laplace sehingga didapat:
s K s E s U d = ) ( ) ( (2.23)
Pengendali derivatif ini tidak bisa berdiri sendiri, karena pengendali jenis ini hanya aktif pada waktu transien (tidak berpengaruh pada keadaan tunak). Pada waktu transien, pengendali derivatif menyebabkab redaman pada sistem sehingga memperkecil lonjakan (over shoot). Akan tetapi, pengendali jenis ini tidak bisa menghilangkan offset.
1 ) ( ) ( ) ( ) ( + + = = s K T s K s X s Y s G d d (2.24)
Persamaan sinyal kesalahan penggerak untuk masukan X(s) sinyal unit step adalah:
s s K T Ts s E s 1 1 ) ( 1 ) ( + + + = (2.25)
Offset yang terjadi pada keadaan tunak:
{ ( ) {lim ( ) lim 0 s sE t e offset s t→∞ → = = { s s K T Ts d s 1 1 ) ( 1 lim 0 + + + = → 1= (2.26)
Dengan demikian terbukti bahwa pada keadaan tunak untuk masukan unit step, terjadi
Gambar 2.8 Diagram blok sistem loop tertutup dengan Proportional Controller
2.2 Konsep Dasar Pengendali Logika Fuzzy
Menurut kamus Oxford English Dictionary, kata “fuzzy” berarti tidak jelas, kabur, pusing.
Logika fuzzy untuk pertama kalinya dikenalkan pada tahun 1965 oleh Lotfi A. Zadeh dari California University at Berkeley. Zadeh mengenalkan teori himpunan fuzzy sebagai perluasan dari teori himpunan tradisional dan mengembangkan teori logika fuzzy untuk memanipulasi himpunan fuzzy.
Dalam teori himpunan tradisional, suatu permasalahan dibatasi pada “anggota himpunan” dan “bukan anggota himpunan”, “ya” dan “tidak” atau “1” dan “0” seperti pada logika biner. Sedangkan dalam dunia nyata banyak sekali dijumpai variabel-variabel yang tidak bisa diselesaikan dengan teori himpunan tradisional. Himpunan fuzzy mengenalkan derajat keanggotaan dari suatu permasalahan (item) dalam suatu himpunan dengan nilai derajat kebenaran atau kesalahan tertentu. Hal ini akan memudahkan pemodelan yang dibuat manusia berdasarkan pengalaman dan keahliannya.
Y(s)
+
_
E(s) X(s) 1/(Ts + 1) Kd sHimpunan fuzzy didefinisikan dalam suatu semesta pembicaraan (universe of
discourse) yang dapat berupa harga pengukuran yang mungkin terbaca, range
kemungkinan, tegangan masukan, tegangan keluaran dan lain-lain tergantung pada permasalahan yang dibicarakan.
Untuk suatu semesta pembicaraan U, himpunan fuzzy ditentukan dengan fungsi keanggotaan yang memetakan anggota-anggota U ke dalam suatu range keanggotaan yang biasanya bernilai antara 0 dan 1, buka suatu harga diskrit 0 dan 1 seperti dalam himpunan biasa.
Misalnya, jika sebuah mobil melaju dengan kecepatan 100 km/jam, semua orang akan setuju bahwa mobil tersebut berjalan dengan cepat. Demikian juga bila sebuah mobil berjalan dengan kecepatan 10 km/jam, maka semua orang akan setuju bahwa mobil tersebut berjalan lambat. Akan tetapi bila mobil tersebut berjalan dengan kecepatan 50 km/jam, beberapa orang mengatakan mobil tersebut berjalan dengan cepat. Akan tetapi ada juga yang mengatakan sedang atau bahkan lambat. Dengan teori himpunan tradisional, permasalahan ini akan lebih sulit diselesaikan. Dengan teori himpunan fuzzy, permasalahan tersebut akan terlihat lebih sederhana dan mudah diselesaikan, karena kecepatan mobil dapat dilihat sebagai suatu fungsi keanggotaan dengan besarnya kecepatan sebagai derajat keanggotaannya. Untuk lebih jelasnya dapat dilihat pada gambar berikut :
Gambar 2.9. Kecepatan mobil sebagai suatu fungsi keanggotaan dengan derajat keanggotaan “cepat”, “sedang” dan “lambat”.
10 20 30 40 50 60 70 80 90 100
kecepatan mobil (km/jam) F
1 lambat sedang cepat
0,25 0,75
Dari gambar di atas, dapat diketahui bahwa laju mobil A termasuk kategori lambat dengan derajat keanggotaan 0,25, sedang dengan derajat keanggotaan 0,75 dan cepat dengan derajat keanggotaan 0.
2.2.1 Notasi Himpunan Fuzzy
Misalkan U adalah kumpulan objek yang dilambangkan dengan [ u ]. U adalah semesta pembicaraan (universal of discourse) yang terdiri atas semua elemen yang mungkin pada suatu permasalahan teretentu. Suatu himpunan nyata (crisp set) A dalam semesta pembicaraan U dapat dinyatakan dengan menyebutkan semua anggota-anggotanya (list method) atau dengan menyebutkan sifat yang harus dipenuhi oleh setiap anggota himpunan (rule method) yang dapat dilambangkan :
A = {x ∈ U | x memenuhi beberapa kondisi} (2.26) Metode ketiga adalah dengan metode keanggotaan (membership method) yang dapat dinyatakan :
µA (x) = 1 ; x ∈ A
0 ; x ∉ A (2.27)
sehingga himpunan A secara matematis ekuivalen dengan fungsi keanggotaan µA(x).
Himpunan fuzzy dalam U dapat dinyatakan sebagai himpunan pasangan elemen generik
x dan nilai dari fungsi keanggotaan µA.
A = {(x , µA (x)) | x ∈ U} (2.28)
dimana µA adalah fungsi keanggotaan yang bernilai dalam interval [0 1]. Jika U kontinyu (sebagai contoh U = R), maka a biasanya ditulis :
x x A U A
∫
= µ ( )/ (2.29)dimana simbol integral tidak melambangkan operasi integrasi, melainkan kumpulan
semua titik-titik x ∈ U dari fungsi keanggotaan yang bersangkutan. Jika U adalah diskrit, maka A dilambangkan dengan :
∑
= U x x A A µ ( )/ (2.30) atau N N F F F u u u u u u F =µ ( 1)/ 1)+µ ( 2)/ 2+...+µ ( )/ (2.31) Notasi “+” dan “Σ” bukan merupakan notasi operasi aritmatik, melainkan hanya melambangkan gabungan himpunan dan notasi ” / ” digunakan untuk menghubungkan suatu anggota himpunan dengan derajat keanggotaannya.2.2.2. Support set, Crossover point dan Fuzzy Singleton
Support set dari suatu himpunan fuzzy dalam semesta pembicaraan U adalah
himpunan tegas yang terdiri dari semua elemen yang lebih besar dari nol.
supp (A) = {x ∈ U | µA (x) > 0} (2.32)
sedangkan elemen x dalam U yang mempunyai fungsi keanggotaan µA = 0,5 disebut
crossover point.
Crossover (A) = {x ∈ U | µA (x) = 0,5} (2.33)
Jika himpunan fuzzy mempunyai support di satu titik tunggal, maka disebut fuzzy
singleton dan jika suatu himpunan fuzzy tidak mempunyai support,
2.2.3 αα-cut Himpunan Fuzzy
Adalah himpunan tegas Aα yang terdiri dari semua elemen U yang mempunyai
nilai keanggotaan dalam A lebih besar atau sama dengan α :
Aα = {x ∈ U | µA (x) ≥α} (2.34)
2.2.4 Fungsi Keanggotaan (Membership Function)
Fungsi keanggotaan (membership function) adalah kurva yang menggambarkan bagaimana setiap titik dalam suatu himpunan fuzzy dipetakan ke dalam suatu nilai keanggotaan (derajat keanggotaan) dalam interval [0 1].
Sebagai contoh, misalnya diambil semesta pembicaraan adalah umur seseorang. Derajat keanggotaan diambil tiga sampel, yaitu muda, setengah tua (separuh baya) dan tua. Menurut teori himpunan klasik, pembagian rentang umur untuk ketiga kategori diatas adalah :
Muda ; < 35 tahun
Separuh baya ; antara 36 sampai 55 tahun
Tua ; ≥ 56 tahun
Definisi diatas masih menimbulkan kerancuan. Yang pertama adalah, tidak semua orang setuju bahwa umur 55 tahun masih digolongkan separuh baya karena mungkin ada beberapa orang yang menganggap umur 55 tahun sudah termasuk tua. Yang kedua adalah akan sulit menentukan keanggotaan seseorang yang berumur 55 tahun 354 hari (56 tahun kurang 1 hari).
Berbeda dengan teori klasik, pada himpunan fuzzy, pembagian rentang umur dari ketiga kategori di atas membentuk suatu kurva yang kontinyu (smooth). Di sini,
perubahan umur seseorang dari satu kategori ke kategori lain tidak berubah seketika. Kurva-kurva dari ketiga kategori tersebut juga bisa saling memotong, sehingga umur seseorang bisa masuk ke lebih dari satu kategori, misalnya umur 35 tahun bisa masuk ke golongan muda dan separuh baya.
Gambar 2.10. Usia sebagai himpunan Fuzzy
Ada dua cara mendefinisikan fungsi keanggotaan untuk himpunan fuzzy, yaitu secara numeris dan fungsional.
Secara Numeris : dimana derajat keanggotaan dinyatakan sebagai vektor dari nilai-nilai yang mempunyai dimensi yang tergantung dari level diskritisasi.
Secara Fungsional : dimana fungsi keanggotan dinyatakan sebagai fungsi matematis tertentu, misalnya kurva segitiga, trapesium, singleton dan lain-lain.
Sebagai contoh fungsi segitiga dinyatakan sebagai berikut :
(
) (
)
(
) (
)
c u c u b b u a u b c u c a b a u c b a u T > ≤ ≤ ≤ ≤ < − − − − = ; ; ; 0 ; 0 0 ) , , ; ( (2.35) Muda Paruh Baya Tua 35 55 0 1 Usia u µGambar 2.11. Himpunan Fuzzy yang dinyatakan sebagai fungsi T
2.2.5 Operasi Himpunan Fuzzy
Penggunaan himpunan fuzzy menyediakan dasar bagi manipulasi sistematis dari konsep ketidakjelasan dengan menggunakan operasi himpunan fuzzy dengan melakukan manipulasi pada fungsi keanggotaan.
Misalkan A dan B adalah dua himpunan fuzzy dalam semesta pembicaran U dengan
fungsi keanggotaan µA (x) dan µB (x), maka pada kedua himpuna fuzzy tersebut berlaku
operasi-operasi :
1. Kesamaan (Equality)
Dua himpunan fuzzy A dan B dikatakan sama jika didefinisikan dalam semesta pembicaraan yang sama dan mempunyai fungsi keanggotaan yang sama pula.
µA (x) = µB (x) ; untuk semua x ∈ U (2.36)
2. Gabungan (Union)
Gabungan/union dua himpunan fuzzy A dan B dengan fungsi keanggotaan µA (x) dan
µB (x) adalah himpunan fuzzy yang mempunyai fungsi keanggotaan µ(A∪B) (x).
µ(A∪B) (x) = max {µA (x) , µB (x)} ; untuk semua x ∈ U (2.37)
1
u µ
Gambar 2.12. Fungsi keanggotaan untuk Union (gabungan) dari 2 himpunan Fuzzy
Akan tetapi operator max {µA (x) , µB (x)} tidak memuaskan pada beberapa kasus.
Oleh karena itu perlu didefinisikan tipe operator lain, yaitu S-Norms.
s[µA (x) , µB (x)] = µ(A∪B) (x) = max {µA (x) , µB (x)} (2.38)
Agar fungsi di atas dapat memenuhi syarat sebagai union, maka harus memenuhi syarat :
• s(1,1) = 1, s(0,a) = s(a,0) = a (2.39)
• s(a,b) = s(b,a) (2.40)
• jika a ≤ a’ dan b ≤ b’, maka s(a,b) ≤ s(a’,b’) (2.41)
• s(s(a,b),c) = s(a,(b,c)) (2.42)
3. Irisan (Intersection)
Irisan/Intersection dua himpunan fuzzy A dan B dengan fungsi keanggotaan
µA (x) dan µB (x) adalah himpunan fuzzy yang mempunyai fungsi keanggotaan µ(A∩B)
(x).
µ(A∩B) (x) = min {µA (x) , µB (x)} ; untuk semua x ∈ U (2.43)
0 1 u µ
µ
∪ F D 100%Akan tetapi operator min {µA (x) , µB (x)} tidak memuaskan pada beberapa kasus.
Oleh karena itu perlu didefinisikan tipe operator lain, yaitu T-Norms.
t[µA (x) , µB (x)] = µ(A∪B) (x) = min {µA (x) , µB (x)} (2.44)
Agar fungsi di atas dapat memenuhi syarat sebagai union,maka harus memenuhi syarat :
• t(0,0) = 0, t(1,a) = s(a,1) = a (2.45)
• t(a,b) = t(b,a) (2.46)
• jika a ≤ a’ dan b ≤ b’, maka t(a,b) ≤ t(a’,b’) (2.47)
• t(s(a,b),c) = t(a,(b,c)) (2.48)
Gambar 2.13. Fungsi keanggotaan untuk Intersection (irisan) dari 2 himpunan Fuzzy
4. Komplemen (Complement)
Komplemen dari himpunan fuzzy A ternormalisasi dengan fungsi keanggotaan µA (x)
adalah himpunan fuzy dengan fungsi keanggotaan :
µ’A (x) = 1 – µA (x) ; untuk semua x ∈ U (2.49) 0 1 u µ 100% ∩
µ
F DGambar 2.14. Fungsi keanggotaan himpunan Fuzzy F dan komplemen F
1.2.6 Variabel Linguistik
Dalam kehidupan sehari-hari kata-kata sering digunakan untuk menggambarkan suatu variabel. Misalnya “hari ini panas” atau “temperatur hari ini tinggi”. Kata “tinggi” merupakan nilai (value) dari variabel “temperatur hari ini”, sebagai ganti 30 oC pada variabel yang sama. Ketika suatu variabel menggunakan kata-kata dalam bahasa natural sebagai nilainya (value), maka variabel tersebut dinamakan variabel linguistik yang dicirikan oleh himpunan fuzzy yang terdefinisi dalam semesta pembicaraan pembicaran dimana variabel tersebut didefinisikan.
Sebagai contoh misalnya diambil suatu variabel linguistik x yaitu kecepatan sebuah mobil dengan nilai (value) antara [0 Vmax]. Dari sini bisa ditetapkan 3 himpunan
fuzzy “lambat”, “sedang” dan “cepat” dalam rentang [0 Vmax]. Maka dapat dinyatakan x
adalah cepat dengan derajat keangotaan µc (x). Tentu saja x juga bisa dinyatakan dalam
angka pada himpunan klasik, misalnya x = 50 km/jam. 0 1 u µ 100% F
µ
µ
F1.2.7 Modifier
Himpunan fuzzy mampu untuk menyertakan kata-kata penekanan (modifier) eperti sangat, agak, kurang atau lebih. Kata-kata penekanan tersebut mempunyai definisi operasi :
• Sangat A adalah himpunan fuzzy dalam U dengan fungsi keanggotaan :
µsangat A (x) = [µA (x)]2 (2.50)
• Lebih atau kurang A adalah himpunan fuzzy dalam U dengan fungsi keanggotaan :
µlebih atau kurang A (x) = [µA (x)]1/2 (2.51)
• Sedangkan sangat-sangat A memepunyai fungsi keangotaan :
µsangat-sangat A (x) = [[µA (x)]2]2 (2.52)
1.2.8 Fuzzy If – Then Rules
Dalam suatu sistem fuzzy, pengetahuan manusia diwakili oleh atutan Jika – Maka
(If – Then rules). Aturan fuzzy jika – maka adalah suatu pernyataan kondisional yang
dinyatakan :
IF <fuzzy proposition> THEN <fuzzy proposition>
Ada dua tipe fuzzy proposition, yaitu :
• Atomic fuzzy proposition yaitu fuzzy proposition yang terdiri dari suatu pernyataan
tunggal. Misalnya : x adalah A
• Compound fuzzy proposition yaitu gabungan lebih dari satu atomic fuzzy proposition
dengan menggunakan penghubung “dan “, “atau” dan “tidak”. Misalnya : (x adalah A atau x adalah tidak M) dan x adalah F
1.2.9 Struktur Dasar Pengendali Logika Fuzzy
Secara umum, struktur dasar pengendali logika fuzzy dapat digambarkan dalam diagram blok berikut.
Gambar 2.15. Struktur dasar Pengendali logika Fuzzy
a. Fuzzifikasi
Adalah proses pemetaan dari suatu harga titik sebenarnya x* ∈ U ∈ Rn ke suatu himpunan fuzzy A′ dalam U. Dengan kata lain, fuzzifikasi adalah suatu cara mengubah masukan yang berupa data tegas (crisp) menjadi nilai linguistik dalam semesta pembicaraan.
b. Basis Pengetahuan (Knowledge Base)
Bagian ini terdiri dari dua bagian, yaitu basis data (data base) dan basis aturan
(rule base). Basis Pengetahuan Unit Defuzzifikasi Proses Yang Dikontrol Unit Fuzzifikasi Mekanisme Pertimbangan Fuzzy Keluaran Non-Fuzzy Keluaran Proses
• Basis data.
Basis data terdiri dari data-data yang berhubungan dengan semesta pembicaraan dan fungsi keanggotaan himpunan fuzzy masukan dan keluaran.
• Basis aturan
Merupakan kumpulan aturan-aturan kontrol yang biasanya dinyatakan dalam bentuk aturan JIKA – MAKA (IF – THEN Rules). Aturan tersebut disusun untuk menghubungkan antara himpunan masukan (antecedent) dan himpunan keluaran
(consequent). Misalnya :
- Jika jumlah tamu yang datang banyak maka sediakan ruangan yang besar - Jika jumlah tamu yang datang sedikit maka sediakan ruangan yang kecil
Ada 4 cara untuk menentukan basis aturan ini :
• Pengalaman pakar dalam merumuskan aturan yang menghubungkan antara himpunan masukan dan keluaran.
• Pengalaman operator yang sudah terbiasa menangani proses kontrol tanpa memerlukan pengetahuan tentang model kuantitatif dari proses yang dikontrol.
• Berdasarkan model fuzzy dari proses.
• Berdasarkan pembelajaran (learning) dalam arti terdapat “meta rule” yang mempunyai kemampuan membuat.memodifikasi aturan berdasarkan kinerja sistem secara keseluruhan.