1 | Rancang Bangun Trajectory Planning (Perencanaan Lintasan) Untuk Scara Robot Menggunakan Metode Genetic Algorithm (GA)
RANCANG BANGUN TRAJECTORY PLANNING (PERENCANAAN LINTASAN) UNTUK SCARA ROBOT MENGGUNAKAN METODE GENETIC ALGORITHM (GA)
ABSTRAK --- Di dalam bidang perindustrian saat ini sangat memerlukan sebuah robot yang memiliki sistem dengan tingkat kecerdasan yang tinggi untuk melakukan sebuah pekerjaan atau perakitan. Dalam studi ini akan dijelaskan dan akan dibuat tentang Selective
Compliant Assembly Robot Arm (SCARA). Untuk
melakukan tugas yang diberikan, robot mengumpulkan atau menerima informasi mengenai lingkungan eksternal dengan menggunakan metode yang terstruktur seperti Genetic Algorithm. Oleh karena itu, makalah ini menerangkan sebuah
perancangan Trajectory Planning yang
menggunakan Genetic Algorithm yang mana merupakan pengambangan dari Genetic Algorithm untuk sebuah robot lengan khususnya Selective
Compliant Assembly Robot Arm (SCARA). Dengan
menggunakan metode tersebut robot ini dapat memiliki sebuah sistem robot dengan kecerdasan terstruktur. Robot ini memiliki presepsi gerak untuk mencapai titik tujuan sesuai dengan lintasan yang telah direncanakan. Robot ini dirancang memiliki translasi pada sumbu Z dan bekerja pada sumbu XY.
Kata Kunci: SCARA Robot, Trajectory Planning, Genetic Algorithm.
I. PENDAHULUAN
Penggunaan robot di industri semakin meningkat dari waktu ke waktu untuk menangani berbagai tugas, baik tugas yang tidak bisa ditangani manusia seperti di bidang nuklir, kimia, perjalanan ke luar angkasa dan tugas-tugas lain yang di lakukan di lingkungan yang berbahaya, maupun tugas-tugas yang dapat dilakukan manusia seperti pengelasan, pengangkutan barang, dan tugas-tugas lainnya. Hal ini terjadi karena robot memiliki banyak kelebihan yang tidak dimiliki manusia diantaranya : menghasilkan output yang sama ketika mengerjakan suatu pekerjaan secara berulang-ulang, tidak mudah lelah, ketelitian dan kecepatan menyelesaikan tugas, dapat diprogram
ulang sehingga dapat difungsikan untuk beberapa tugas yang berbeda, lebih sedikit melakukan kesalahan dibandingkan manusia, kemudahan dalam memonitor kinerja robot, menghemat biaya produksi keseluruhan serta berbagai keuntungan lainnya.
Salah satu bentuk robot yang telah banyak dibuat adalah robot-robot yang menyerupai bentuk lengan manusia. Robot lengan ini tentunya berbentuk lengan-lengan mekanik yang banyak digunakan sebagai pengganti tenaga manusia salah satunya dalam bidang industri. Produk lengan robot yang akan digarap ini akan digabungkan dengan sebuah mobile robot sehingga tercapai sebuah produk yang memiliki fungsi yang lebih baik. Dari sekian banyak jenis lengan robot, salah satu contohnya adalah Selective Compliant Assembly
Robot Arm (SCARA). Sejarah penemuan robot SCARA ini berawal pada tahun 1981. Di beberapa
perusahaan manufaktur di Jepang seperti Sankyo Seiki, Pentel dan NEC menyajikan sebuah konsep yang tergolong masih baru untuk robot perakitan.Dengan menggunakan konsep tersebut kemudian dikembangkanlah sebuah robot yang di bawahi oleh bimbingan Hiroshi Makino, seorang profesor di Universitas Yamanashi. Robot ini dirancang memiliki translasi pada sumbu Z dan bekerja pada sumbu XY. Pengontrolan dapat dilakukan melalui sebuah perencanaan lintasan yang terstruktur sehingga robot memiliki presepsi untuk mencapai suatu tujuan tertentu.
Untuk memperoleh keterampilan dan gerak, setidaknya dalam pengerjaan robot ini membutuhkan sebuah metode untuk evaluasi internal dan eksternal dari robot tersebut. Untuk itu, dalam perancangan dan pembuatan SCARA robot ini akan dirancang untuk menggunakan sebuah metode yaitu Genetic Algorithm (GA), agar pergerakan SCARA robot yang akan dirancang ini memiliki tingkat kecerdasan yang tinggi untuk mencapai tujuan akhir (end point) berupa titik atau koordinat di sumbu XYZ. Selain itu SCARA robot ini dapat menghasilkan gerakan melalui interaksi dengan lingkungan, dan pada saat yang sama, Indra Adji Sulistijono, Member, IEEE, Nu Rhaida Arini , Member, IEEE, Ferdinand Orlando S Adji Sulistijono is with the Department of Mechatronics Engi-neering, Electronics Engineering Polytechnic Institute of Surabaya (EEPIS), EEPIS Campus Sukolilo, Surabaya 60111, Indonesia. (Tel: +62-31-594-7280 ext.
4186; Fax: +62-31-594-6114; Email: [email protected]).
Nu Rhaida Arini is with the Department of Mechatronics Engi-neering, Electronics Engineering Polytechnic Institute of Surabaya (EEPIS), EEPIS Campus Sukolilo, Surabaya 60111, Indonesia. (Tel: +62-31-594-7280 ext.
4186; Fax: +62-31-594-6114; Email:).
Ferdinand Orlando is with the Department of Mechatronics Engineering, Electronics Engineering Polytechnic Institute of Surabaya (EEPIS), Indonesia. (Email: [email protected]).
2 | Rancang Bangun Trajectory Planning (Perencanaan Lintasan) Untuk Scara Robot Menggunakan Metode Genetic Algorithm (GA)
secara bertahap memperoleh keterampilan berdasarkan gerakan yang dihasilkan.
II. PERANCANGAN DAN PEMBUATAN ALAT
SCARA Robot yang dibuat adalah SCARA Robot
yang memiliki 4 derajat kebebasan (4 DOF), robot ini dirancang memiliki translasi pada sumbu Z dan bekerja pada sumbu XY. SCARA Robot ini menggunakan 4 buah motor DC,setiap motor DC yang berada di tiap-tiap joint memiliki bobot yang berbeda,oleh karena itu perlu perancangan mekanik yang tepat agar kinerja SCARA Robot yang akan di buat sesuai dengan harapan penulis.
Figure 2.1. Block diagram of the hardware
system’s working
Berikut ini adalah bentuk fisik dari SCARA Robot.
Gambar 2.2 Desain SCARA Robot secara
keseluruhan
III. PERENCANAAN PERSAMAAN KINEMATIKA LENGAN ROBOT
Perhitungan yang akan di pakai untuk perancangan mekanik SCARA Robot adalah
Forward Kinematics. Setelah diagram koordinat link dari robot ditentukan, dengan representasi DH
didapatkan beberapa parameter kinematika dari robot lengan SCARA.
Parameter-parameter kinematika akan dijabarkan ke dalam tabel di bawah ini :
Tabel 3.1 Tabel Link Parameter – Denavit
Hartenberg Parameter (D-H) SCARA robot 4 DOF
Joint (n) θn dn an αn
1 0 d1 0 0
2 θ2 0 a2 0
3 θ3 0 a3 0
4 θ4 0 a4 0
Dengan berdasarkan tabel parameter kinematika 3.2, dapat disusun persamaan matriks robot lengan ini. Transformasi dari koordinat yaw terhadap koordinat Base dihasilkan dari suatu rangkaian transformasi koordinat dimulai dari ujung yaw hingga ke bagian Base robot. Transformasi ini dinyatakan dalam matriks transformasi homogen 4x4. Matriks transformasi
yaw-Base menyatakan sebuah transformasi dari
koordinat ujung yaw (link n) pada koordinat Base (link 0).
Matriks ini dapat dituliskan dalam
persamaan berikut (Pers. 3.1) :
4 3 3 2 2 1 1 0 4 0
A
A
A
A
T
...(3.1) Dimana :
1 0A
Transformasi koordinat Base
2 1A
Transformasi koordinat shoulder ke Base
3 2
A
Transformasi koordinat elbow ke shoulder
4 3A
Transformasi koordinat yaw ke elbow 1 0 0 0 d 1 0 0 0 0 1 0 0 0 0 1 T 1 4 0 1 0 0 0 0 1 0 0 S a 0 C S C a 0 S C 2 2 2 2 2 2 2 2 1 0 0 0 0 1 0 0 S a 0 C S C a 0 S C 3 3 3 3 3 3 3 3 1 0 0 0 0 1 0 0 S a 0 C S C a 0 S C 4 4 4 4 4 4 4 4 1 0 0 0 d 1 0 0 S a S a S a 0 C S C a C a C a 0 S C 1 2 2 23 3 234 4 234 234 2 2 23 3 234 4 234 234 ...(3.10)
3 | Rancang Bangun Trajectory Planning (Perencanaan Lintasan) Untuk Scara Robot Menggunakan Metode Genetic Algorithm (GA)
Sehingga persamaan matriks 3.10 lengan robot SCARA yang didapatkan adalah :
nx=C234...(3.2) ny=S234...(3.3) nz=0...(3.4) sx=S234...(3.5) sy=C234...(3.6) sz=0...(3.7) ox=0...(3.8) oy=0...(3.9) oz=1...(3.10) px=a4C234a3C23a2C2...(3.11) py=a4S234a3S23a2S2...(3.12) pz=d ...(3.13) 1
IV. PERENCANAAN HARDWARE
Kontroler dirancang berdasar sensor dan actuator yang dipasang pada system mekanik. Sensor yang digunakan adalah potensiometer yang akan dipasang pada motor setiap joint, kemudian potensiometer menentukan posisi sebenarnya dari lengan – lengan setiap joint. Sedangkan untuk actuator terdiri atas 1 motor dc 15v & 3 motor dc 5v yang terlebih dahulu dimasukkan ke rangkaian driver. Motor dc yang digunakan untuk menggerakkan setiap joint menggunakan motor dc yang dilengkapi dengan gearbox . Rangkaian
sistem minimum menggunakan ATmega32.
Berikut ini adalah desain hardware elektronik. Desain hardware elektronik dapat dilihat pada gambar 3.4.
Gambar 3.1 Diagram rancangan desain hardware
Dalam perancangan SCARA Robot ini digunakan 4 buah sensor posisi.Sensor posisi yang digunakan adalah ppotensiometer linier 10k. Untuk potensiometer disambungkan ke PORTA yang merupakan input untuk ADC internal yang ada pada ATmega32. Untuk memberikan sinyal PWM
ke driver menggunakan PORTC. Driver
menggunakan catu daya 15v untuk menggerakkan
motor dc pada joint Base dan 5v untuk menggerakkan motor dc pada joint Shoulder,
Elbow, Yaw sebagai aktuatornya.
V. PERENCANAAN SOFTWARE Algoritma Genetika (GA)
Adalah teknik pencarian yang di dalam ilmu
komputer untuk menemukan penyelesaian
perkiraan untuk optimisasi dan masalah pencarian. Proses dalam Algoritma Genetika akan mengikuti siklus seperti yang diilustrasikan pada gambar 1
Gambar 5.1 siklus Algoritma Genetika Beberapa definisi penting yang perlu diperhatikan dalam Algoritma Genetika adalah:
Genotype (Gen), sebuah nilai yang menyatakan
satuan dasar yang membentuk suatu arti tertentu dalam satu kesatuan gen yang dinamakan kromosom. Dalam algoritma genetika, gen ini bisa berupa nilai biner, float, integer maupun karakter, atau kombinatorial.
Allele, nilai dari gen.
Kromosom, gabungan gen-gen yang membentuk
nilai tertentu. Individu, menyatakan satu nilai atau keadaan yang menyatakan salah satu solusi yang mungkin dari permasalahan yang diangkat.
Populasi, merupakan sekumpulan individu yang
akan diproses bersama dalam satu siklus proses evolusi.
Generasi, menyatakan satu-satuan siklus proses
evolusi.
Nilai Fitness, menyatakan seberapa baik nilai dari
suatu individu atau solusi yang didapatkan. A. Mekanisme Algoritma Genetika
Mekanisme yang ada dalam GA yaitu hanya melibatkan penyalinan gen dan pertukaran gen. Siklus perkembangbiakan GA diawali dengan pembuatan himpunan solusi secara acak dinamakan populasi, di mana di dalamnya terdapat individu-individu yang dinamakan kromosom. Kromosom ini secara lambat laun mengalami iterasi ‘perkembangbiakan’ dalam sebuah generasi.
4 | Rancang Bangun Trajectory Planning (Perencanaan Lintasan) Untuk Scara Robot Menggunakan Metode Genetic Algorithm (GA)
Selama dalam sebuah generasi, kromosom-kromosom ini dievaluasi, dengan menggunakan rumus-rumus yang telah ditentukan dalam fungsi fitness. Mekanisme dari GA tersebut yaitu: · Pembngkitan populasi awal
· Fitness · Seleksi
· CrossOver / KawinSilang · Mutasi
B. Prosedur Algoritma Genetika 1) Populasi Awal
Populasi adalah kumpulan dari individu-individu yang mempunyai solusi. Populasi awal pada algoritma GA adalah sekumpulan individu yang dibangkitkan secara acak. Yang perlu dipertimbangkan adalah jumlah populasi, jumlah populasi yang terlalu sedikit akan sulit untuk mencapai solusi terbaik. Sedangkan jika jumlah populasi terlalu banyak maka perhitungan akan menjadi kompleks dan membutuhkan waktu komputasi yang lama.
2) Fitness suatu Individu
Nilai fitness adalah nilai yang menyatakan baik tidaknya suatu solusi (individu). Nilai fitness ini yang dijadikan acuan dalam mencapai nilai optimal dalam algoritma genetika. Algoritma genetika bertujuan mencari individu dengan nilai fitness yang paling tinggi.
3) Seleksi
Seleksi posisi terbaik atau mencari individu yang terbaik dimulai dengan menghitung nilai fitness setiap posisi yang dilalui satu individu. Dengan membandingkan nilai fitness setiap posisi yang dilalui individu tertentu maka akan didapat best trajectory suatu individu. Berikut ini adalahcontoh algoritma seleksi tersebut. Induk digantikan keturunannya segera setelah kelahiran keturunan, dimana operasi genetika bersifat tidak pandang bulu, keturunan yang baik menggantikan induk yang jelek.
4) CrossOver
CrossOver adalah menggabungkan/mengawinkan dua individu dan menghasilkan dua individu baru. Pindah silang adalah operator genetic yang utama. Operator ini bekerja mengambil 2 individu dan memotong string kromosom mereka pada posisi yang terpilih secara acak. Operasi ini tidak selalu dilakukan pada semua individu yang ada. Individu dipilih secara acak untuk dilakukan crossing dengan Pc antara 0,6 - 0,95. Jikapindah silang tidak dilakukan maka nilai dari induk akan diturunkan kepada keturunannya.
5) Mutasi
Mutasi digunakan untuk melakukan modifikasi satu atau lebih nilai gen dalam individu yang sama. Mutasi memastikan bahwa probabilitas untuk pencarian pada daerah tertentu dalam persoalan tidak akan pernah nol dan mencegah kehilangan total materi genetik setelah pemilihan dan penghapusan.
VI. PENGUJIAN DAN ANALISA
Sesuai dengan Fitness Function (fitness= w1.fp + w2.fd )Pengujian algoritma dilakukan pada perbedaan populasi dan koefisien dari w1, dan w2:
1. Individu 10, w1 = 0.8, 0.6, 0.3, 0.5// weight of Sum of distance w2 = 0.2, 0.4, 0.7, 0.5// weight of Sum of angle 2. Individu 50, w1 = 0.8, 0.6, 0.3, 0.5// weight of Sum of distance w2 = 0.2, 0.4, 0.7, 0.5// weight of Sum of angle
6.1 Analisa Percobaan menggunakan Individu 10:
Pengujian berikut bertujuan untuk mengetahui pengaruh nilai fitness jika parameter – parameter pemberat diubah – ubah dengan nilai tertentu. Tabel 4.3 adalah setting yang dijadikan konstan pada pengujian ini, sedangkan yang dijadikan variabel adalah seperti pada tabel 4.4.
Tabel 6.1 Hasil pengujian konstanta pemberat GA
Coba ke Sum of distance (Fp) Sum of Angle (Fd) 1 0.8 0.2 2 0.6 0.4 3 0.3 0.7 4 0.5 0.5
Tabel 6.2 Hasil parameter GA, Jumlah Individu 10
Individu 10
Konfigurasi trajectory 5
Panjang kromosom 140
Probabilitas cross over 0,6
Probabilitas mutation 0,01
Pada percobaan pertama menggunakan w1=0.8 dan w2=0.2 terlihat bahwa fitness dengan nilai terbesar
mempunyai kurva yang relative stabil
dibandingkan nilai fitness terkecil.Pada gambar Percobaan kedua kurva dari w1=0,6 w2=0,4 memiliki perbandingan yang cukup jelas dibandingkan percobaan 1,dari kurva percobaan kedua dapat kita lihat bahwa nilai fitness terkecil tidak stabil dibandingkan dengan kurva pada nilai
5 | Rancang Bangun Trajectory Planning (Perencanaan Lintasan) Untuk Scara Robot Menggunakan Metode Genetic Algorithm (GA)
fitness terbesar,percobaan ketiga w1=0,3 w2=0,7,dan percobaan keempat w1=0,5 w2=0,5 mempunyai analisa kurva yang sama dengan percobaan kedua,bahwa nilai fitness terbesar yang mempunyai bentuk kurva yang stabil,walupun pada awal mengalami osilasi.Sehingga bisa dapat dilihat dari percobaan pertama sampai dengan terakhir menggunakan 10 individu,bahwa nilai fitness terbesar yang mempunyai solusi terbaik dibandingkan nilai fitness terkecilW1 = 0.6// weight sum of distance W2 = 0.4// weight sum of angle
Tabel 6.3 Hasil Fitness dengan menggunakan
w1=0.6, w2=0.4 w1= 0,6 w2=0,4 1589.237 1582.982 1586.488 1580.478 1591.118 1579.363 1587.952 1579.221 1586.743 1581.99
Sehingga didapatkan kurva seperti gambar di bawah ini:
Ket. garis biru= nilai fitness terbesar,garis merah= nilai fitness terkecil
Gambar 6.1 Grafik nilai fitness w1=0.6, w2=0.4
Pada grafik dapat dilihat bahwa untuk mendapatkan trayektori yang baik maka membutuhkan beberapa trial, untuk nilai garis biru trial ke-5 didapatkan nilai 1586.743,dan untuk nilai garis merah trial ke-5 didapatkan nilai 1581.99.
6.2 Analisa Percobaan menggunakan Individu 50:
Percobaan berikut yang akan dilakukan adalah men-setting tetap parameter – parameter nilai fitness tetapi dengan merubah – rubah jumlah populasi. Berikut ini adalah setting parameter yang dibuat tetap.
Tabel 6.4 Hasil parameter GA, Jumlah Individu 50
Individu 50
Konfigurasi trajectory 5
Panjang kromosom 84
Probabilitas cross over 0,6
Probabilitas mutation 0,01
Analisa Percobaan menggunakan Individu 50:
Pada percobaan pertama yaitu dengan menggunakan 50 individu,dan nilai bobot yang dipakai adalah w1=0.8 dan w2=0.2 terlihat bahwa
fitness dengan nilai terbesar mempunyai kurva
yang relative stabil dibandingkan nilai fitness terkecil,walaupun kurva terlihat hamper sama satu dengan yang lainnya. Pada gambar Percobaan kedua kurva dari w1=0,6 w2=0,4 memiliki perbandingan yang cukup jelas dibandingkan percobaan 1,dari kurva percobaan kedua dapat kita lihat bahwa nilai fitness terkecil tidak stabil dibandingkan dengan kurva pada nilai fitness terbesar,percobaan ketiga w1=0,3 w2=0,7,dan percobaan keempat w1=0,5 w2=0,5 mempunyai analisa kurva yang sama dengan percobaan kedua,bahwa nilai fitness terbesar yang mempunyai bentuk kurva yang stabil,walupun pada awal mengalami osilasi.Sehingga bisa dapat dilihat dari percobaan pertama sampai dengan terakhir menggunakan 50 individu,bahwa nilai fitness terbesar yang mempunyai solusi terbaik dibandingkan nilai fitness terkecil.
W1 = 0.6// weight sum of distance W2 = 0.4// weight sum of angle
Tabel 6.5 Hasil Fitness dengan menggunakan
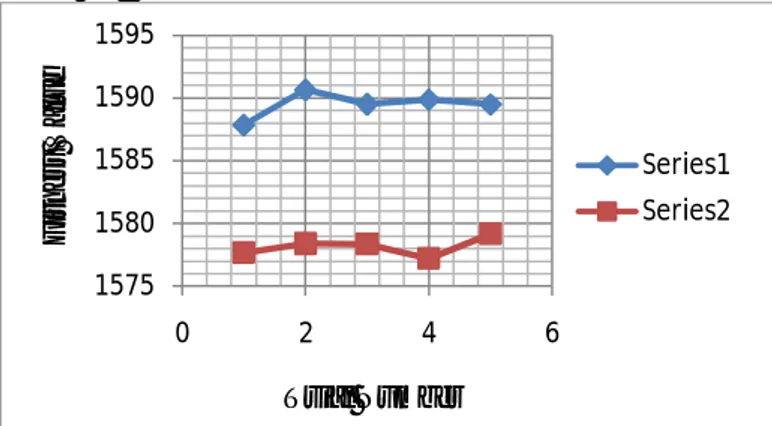
w1=0.6, w2=0.4 w1= 0,6 w2=0,4 1587.848 1577.691 1590.664 1578.39 1589.511 1578.343 1589.87 1577.228 1589.492 1579.155
Sehingga didapatkan kurva seperti gambar di bawah ini:
Ket. garis biru= nilai fitness terbesar,garis merah= nilai fitness terkecil
Gambar 6.2 Grafik nilai fitness w1=0.6, w2=0.4
Pada grafik dapat dilihat bahwa untuk mendapatkan trayektori yang baik maka membutuhkan beberapa trial, untuk nilai garis biru 1575 1580 1585 1590 1595 0 2 4 6 F itn e ss V al u e Trial Number Series1 Series2 1575 1580 1585 1590 1595 0 2 4 6 F itn e ss V al u e Trial Number Series1 Series2
6 | Rancang Bangun Trajectory Planning (Perencanaan Lintasan) Untuk Scara Robot Menggunakan Metode Genetic Algorithm (GA)
trial ke-5 didapatkan nilai 1589.492,dan untuk nilai garis merah trial ke-5 didapatkan nilai 1579.155.
VII. KESIMPULAN & SARAN 7.1 Kesimpulan
Berdasarkan seluruh percobaan yang telah diujikan maka dapat ditarik kesimpulan besar, antara lain:
1. Setelah dilakukan pengujian Hardware tiap pergerakan mulai posisi awal, Trajectory 1,
Trajectory 2, Trajectory 3, sampai posisi
akhir diperoleh hasil error pergerakan tiap
joint berbeda-beda.Hal ini dikarenakan
robot lengan SCARA mempunyai backlash yang cukup besar, sehingga kesalahan pergerakan sendi terakumulasi pada ujung sendi.
2. Pengujian SCARA Robot diperlukan
Software: Qt Nokia (tampilan HMI dan
animasi 3D OpenGL) dan Code Vision sebagai program mikrokontroler
3. Dari seluruh hasil percobaan dapat dilihat bahwa jika w1 lebih besar maka fitness nya lebih besar pula dan jika w1 lebih kecil dari w2 maka fitnessnya kecil.
4. Pada saat pemberian bobot w1= 0.6 dan w2= 0.4 hasil grafik yang dihasilkan lebih smooth artinya fitness pada bobot ini lebih baik dibandingkan dengan pengujian bobot
fitness yang lain.
5. Grafik terlihat lebih stabil pada saat iterasi ke-100 artinya semakin besar iterasi yg diberikan maka kesempatan untuk mencari fitness terbaik lebih besar dibandingkan iterasi dengan jumlah yang kecil.
7.2 Saran
Disadari bahwa Tugas Akhir ini msh jauh dari sempurna oleh karena itu adapun saran yang diberikan agar nantinya Tugas Akhir ini diharapkan dapat lebih baik.
1. Mekanik dibuat seringan mungkin,agar tidak terlalu membebani kinerja motor.
2. Menggabung metode GA dengan
simulasinya agar ringkas dan lebih baik. 3. Dalam simulasi perlu digambarkan titik –
titik trajectory planning dan menggambar obstacle agar memudahkan pembaca untuk mengetahui koordinat – kordinat mana yg ditempuh,dan juga mengetahui keberadaan obstacle pada simulasi.
VIII. SIMPULAN & SARAN
[1] Pitowarno, E. (2006). “Robotika: Desain,
Kontrol, dan Kecerdasan Buatan”.
Yogyakarta : Andi
[2] Kubota, Naoyuki. 1996. Trajectory Planning of Cellular Manipolator System Using Virus-Evolutionary Genetic Algorithm. Nagoya, Japan
[3] Kubota, Naoyuki. 1999. Trajectory Planning and Learning of A Redundant with Structured Intelligence. Congress on Evolutionary Computation
[4] Cinthya dan Indra. 2009. Human-Friendly Arm Robot Using Interactive Genetic Algorithm. Surabaya, Indonesia.
[5] Zuhantoro, A. (2006). “Sistem pembelajaran Kinematika Robot Lengan 3D”. Surabaya: Proyek Akhir T. Elektronika PENS – ITS. [6] Risnumawan, A. (2009). “Human Friendly
Arm robot Menggunakan Interaktif Optimasi
Partikel Swarm (IPSO)”. Surabaya: Proyek Akhir T. Elektronika PENS – ITS.
[7] K.S.Fu, R.C.Gonzales, C.S.G.Lee. (1987). “Robotics: Control, Vision, and intelligence”. McGraw-Hill International Edition.
[8] Manjunath.T.C.(2007). “Kinematic Modeling
and Maneuvering of 5 Axes Articulated Robot Arm”. International Journal of Mechanical,
Industrial and Aerospace Engineering. [9] Lung-wen-tsai. (1999). “Robot analysis: the
mechanical of serial
manipulator”.Wiley-interscience publication.
[10] Firdaus, Ermas. (2009). “Inverse Kinematics dengan menggunakan metode geometril pada lengan robot ”. Surabaya: Proyek Akhir T. Elektro– ITS.
[11] Melani Shoemaker and Blake Hannaford, 2003 : Inverse Kinematics, Example: Chair
Helper 5-DOF Robot.
brl.ee.washington.edu/Education/EE543/EE54 3_2006/notes/pdfs/shoemaker.h.pdf.
[12] J.J. Pickle, Robotics Research Group. Joint
Type,
http://www.robotics.utexas.edu/rrg/learn_mor e/low_ed /joints/