HASIL DAN PEMBAHASAN Hasil Perancangan Rangkaian ARR
Perancangan rangkaian ARR dibuat berdasarkan skematik rangkaian. Skematik tersebut kemudian dicetak menjadi PCB, selanjutnya dipasang komponen sesuai tempat yang telah dirancang. Gambar 14 menunjukkan hasil perancangan dari rangkaian ARR secara keseluruhan.
a. Rangkaian ATmega8
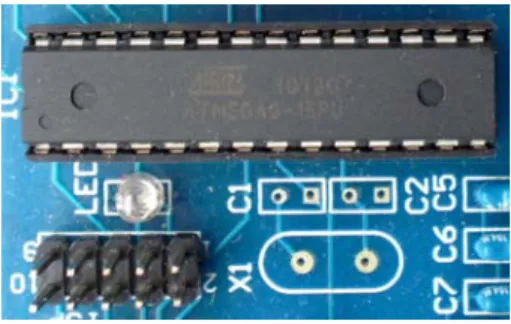
Microcontroller ATmega8 merupakan pusat dari proses yang akan dijalankan oleh sistem. Microcontroller menerima perintah berupa program dari komputer dan melaksanakannya. Untuk dapat berkomunikasi dengan komputer, microcontroller minimal harus memiliki sebuah rangkaian seperti yang ditunjukkan pada Gambar 8.15
PortD.7 pada ATmega8
disambungkan ke kaki LED yang negatif dan kaki LED positif diberi hambatan sebesar 560 Ω sebelum dihubungkan ke VCC. Pin Reset dihubungkan ke resistor 47 k Ω ke VCC dan ke kapasitor 3.3 µF menuju GND (ground). Kristal tidak dipasang karena menggunakan kristal internal pada ATmega8 sebesar 1 MHz. Konektor ISP dihubungkan ke pin MOSI, RST, SCK, MISO, GND dan VCC. Gambar 15 menunjukkan komponen ATmega8 yang tela terpasang.
Gambar 14. Hasil rancangan rangkaian ARR. (Difoto menggunakan kamera digital 9 MP)
Gambar 15. Rangkaian Atmega 8 yang telah terpasang. (Difoto menggunakan kamera
digital 9 MP)
Gambar 16. Rangkaian penahan goncangan. b. Rangkaian Tipping Bucket Sensor
Pembacaan sensor penakar hujan akan memanfaatkan fasilitas interupt 0 dari microcontroller yang digabungkan dengan sumber ground. Dimana jika pin interupt 0 dipicu oleh ground maka akan menyebabkan penghitung curah hujan bekerja. Untuk menghindari adanya goncangan yang sering terjadi pada pin interupt 0 perlu dipasang resistor serta kapasitor keramik, sehingga hanya satu pulsa yang terjadi setiap terjadi jungkitan pada sensor curah hujan. Gambar 16 merupakan rangkaian penahan goncangan.
Prinsip dasar tipping bucket sensor yaitu apabila bagian permukaan dari sensor terkena medan magnet maka dua buah kontak plate tipis yang terdapat dibagian dalam sensor akan tertarik oleh medan magnet, sehingga kontak akan terhubung dan mengakibatkan logika high pada interup 0. Setiap kali kontak terhubung berarti 1 kali jungkitan pada tipping bucket yang merupakan curah hujan dalam 0.2 mm. Gambar 17 merupakan reed switch yang terpasang pada tipping bucket sensor.
470
0.1 uF Reed Switch
INT0
m m t t r d d g m a j m b d Meda menggerakan magnet yang tipping buck turun, geraka reed switch. dua buah kab dihubungkan ground. Kalib merubah ket agar dapat be jungkitan seb menunjukkan bucket sensor dikalibrasi. Gambar 17. R tipping bucke ka Gambar 18. sensor de dikalibrasi. ( an mag n reed switc g terdapat ket, yang ber an itulah yan Sensor ini ha bel untuk ke ke pin in brasi sensor d tinggian pen ergerak ketik besar 6.28 m n jungkitan r dengan pena
Reed switch yan et sensor. (Difo amera digital 9 Jungkitan pada engan penahan (Difoto mengg digital 9 MP gnet un ch, berasal d pada jungki rgerak naik g dideteksi o anya mempun eluarannya, y nterup dan dilakukan den nahan jungki a volume dal mm3. Gambar pada tipp ahan yang su ng terpasang pa oto menggunak 9MP) a tipping bucke n yang sudah gunakan kamer P) ntuk dari itan dan oleh nyai ang ke gan itan lam 18 ping dah ada kan et ra Gam telah c. R deng ada micro SDA pull datas krista Untu date bater RTC ditun Gam deng sebes sebua cadan stabi wakt sebag masu Catu sendi untuk Pin 5 pin tekni sebag RTC wakt berik void { mbar 19. Rang h terpasang. (Di dig Rangkaian RTC RTC DS gan antarmuk 2 pin yan ocontroller. A serta SCL. up resistor 1 sheet. Pada al 32.768 s uk menahan ketika catu d rai eksternal . Hasil ran njukkan pada Pada per mbar 9, pin
gan kristal pem sar 32 MHz. ah bateri CM ngan yang a litas kerja RT tu saat catu d gai ground ukan catu d daya yang m iri dari regul k menjamin 5 (SDA) dan yang diguna ik I2C d gai jalur data
. Untuk m tu diatur m kut : set_jam(void) //R,T,14:00: gkaian RTC DS ifoto menggun gital 9 MP) C DS1307 S1307 merup ka i2C sehin ng dihungk Kedua pin Kedua pin m 10 Kohm ses rangkaian m sebagai sum data waktu daya dimatika yang dipasan ngkaian RTC Gambar 19. rancangan, s 1 dan 2 d mbangkit frek . Pin 3 dihub MOS sebagai akan berfung RTC dalam pe daya utama pa d, sedangka dayanya mela menuju RTC lator 78L05 catu daya u pin 6 (SCL) akan untuk dengan mic waktu yang d melakukan menggunakan d) :00,16:03:11* S1307 yang nakan kamera pakan RTC ngga hanya kan dengan ini adalah memerlukan suai dengan menggunaan mber clock. tetap up to an perlu ada ng pada pin C DS1307 eperti pada dihubungkan kuensi clock bungkan ke i catu daya gsi menjaga enghitungan adam. Pin 4 an sebagai alui pin 8. C disediakan sebesar 5V utama RTC. merupakan komunikasi rocontroller diambil dari pengesetan n program *
//012345678901234567890123 if(dat_ser[6]+0x30 == ':'){ if(dat_ser[9]+0x30 == ':'){ // printf("OK \n\r"); dat_ser[4] = dat_ser[4]*10 + dat_ser[5]; dat_ser[7] = dat_ser[7]*10 + dat_ser[8]; dat_ser[10] = dat_ser[10]*10 + dat_ser[11]; // data hari/tgl dat_ser[13] = dat_ser[13]*10 + dat_ser[14]; dat_ser[16] = dat_ser[16]*10 + dat_ser[17]; dat_ser[19] = dat_ser[19]*10 + dat_ser[20]; // write to rtc rtc_set_time(dat_ser[4],dat_ser[7],dat_se r[10]); rtc_set_date(dat_ser[13],dat_ser[16],dat _ser[19]); } } }
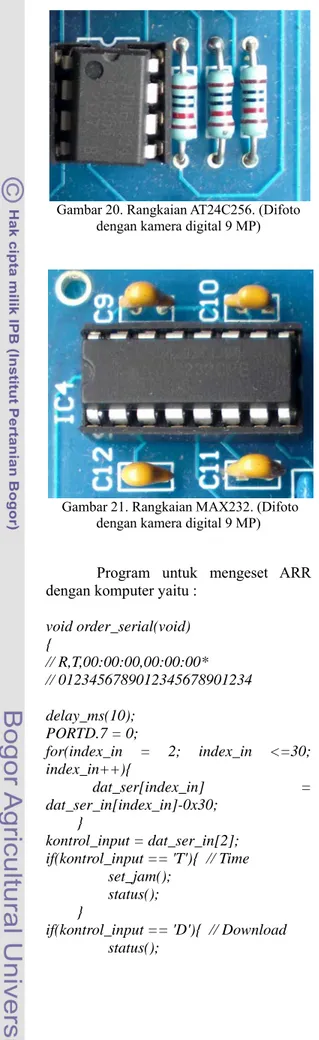
d. Rangkaian EEPROM AT24C256 Perancangan pada Gambar 10, pin 1 sampai dengan 4 dihubungkan ke GND. Pin 5 (SDA) dan pin 6 (SCL) merupakan pin yang digunakan untuk komunikasi teknik I2C seperti pada RTC. Pin 7 merupakan write protect yang disambung ke resistor 10 k Ω dan selanjutnya dihubungkan ke VCC. Pin 8 sebagai masukan catu daya yang dihubungkan ke VCC. Gambar 20 merupakan hasil rangkaian AT24C256.
Pembacaan dan pencatatan data ke EEPROM menggunakan program : void read24C256(char slave, unsigned int ads, int count)
{
if (i2c_start() && i2c_write(slave)) { i2c_write(ads >> 8); i2c_write(ads & 0xFF); i2c_start(); i2c_write(slave | 1); ads = 0; while (count--) eep2[ads++] = i2c_read(1); i2c_read(0); i2c_stop(); } else
printf("the 24C256 did not respond to slave %02X\r\n", slave);
}
void write24C256(char slave, unsigned int ads, int count)
{
if (i2c_start() && i2c_write(slave)) { i2c_write(ads >> 8); // uses a two-byte address
i2c_write(ads & 255); // lo-byte ads = 0;
while (count--)
i2c_write(eep[ads++]); i2c_stop();
delay_ms(10); // allow time for eeprom to write
} else
printf("the 24C256 did not respond to slave %02X\r\n", slave);
}
e. Rangkaian MAX232 Converter
Pemasangan MAX232 seperti pada Gambar 11, dilakukan dengan menghubungkan pin 1 dan 3 ke kaki positif kapasitor 10 µF. Sedang pin 4 dan 5 dihubungkan ke kaki negative dari kapasitur 10 µF tersebut. Pin 2 dihubungkan ke kaki positif kapasitor 10 µF yang telah terhubung ke VCC. Untuk pin 6 dihubungkan ke kaki negative kapasitor 10 µF yang telah terhubung ke GND. Pin 11 (TXD) dan 12 (RXD) digunakan untuk pengiriman dan penerimaan data dengan microcontroller. Pin 13 (RXDIN) dan 14 (TXDA) digunakan untuk mengirim dan menerima data dengan komputer. Pin 16 sebagai masukan catu daya yang dihubungkan ke VCC. Gambar 21 merupakan hasil rangkaian MAX232.
Gambar 20. Rangkaian AT24C256. (Difoto dengan kamera digital 9 MP)
Gambar 21. Rangkaian MAX232. (Difoto dengan kamera digital 9 MP)
Program untuk mengeset ARR dengan komputer yaitu :
void order_serial(void) { // R,T,00:00:00,00:00:00* // 0123456789012345678901234 delay_ms(10); PORTD.7 = 0; for(index_in = 2; index_in <=30; index_in++){ dat_ser[index_in] = dat_ser_in[index_in]-0x30; } kontrol_input = dat_ser_in[2]; if(kontrol_input == 'T'){ // Time set_jam(); status(); } if(kontrol_input == 'D'){ // Download status(); download(); } if(kontrol_input == 'S'){ // Status status(); }
if(kontrol_input == 'E'){ //Erase erase_data(); status(); } status_serial_in = 0; index_in = 0; PORTD.7 = 1; }
Pemasangan pin 2 (transmitted data) dan pin 3 (received data) pada DB9 dihubungkan menyilang dengan ARR. Pin 2 ke RXDIN dan pin 3 ke TXDA. Ini dikarenakan transmitter data komputer agar masuk ke receiver dari ARR dan receiver data komputer memperoleh data dari transmitter ARR, sehingga terjadi komunikasi dua arah yang dapat mengirim dan menerima data secara bersamaan. f. Flowchart Umum Sistem
Microcontroller pertama kali menginisialisasi komunikasi serial (USART), pewaktu (RTC), memory, dan counter. Sebelum microcontroller melakukan pembacaan sensor curah hujan kondisi counter harus sama dengan 0. Selanjutnya microcontroller akan melakukan pembacaan sensor dan menyimpan data ke memory. Apabila terjadi komunikasi dengan PC maka
microcontroller akan melakukan
komunikasi dengan komputer menggunakan komunikasi serial. Jika tidak, microcontroller akan kembali melakukan pembacaan sensor curah hujan. Gambar 22 menunjukkan Flowchart umum sistem.
Gambar 22. Flowchart umum sistem.
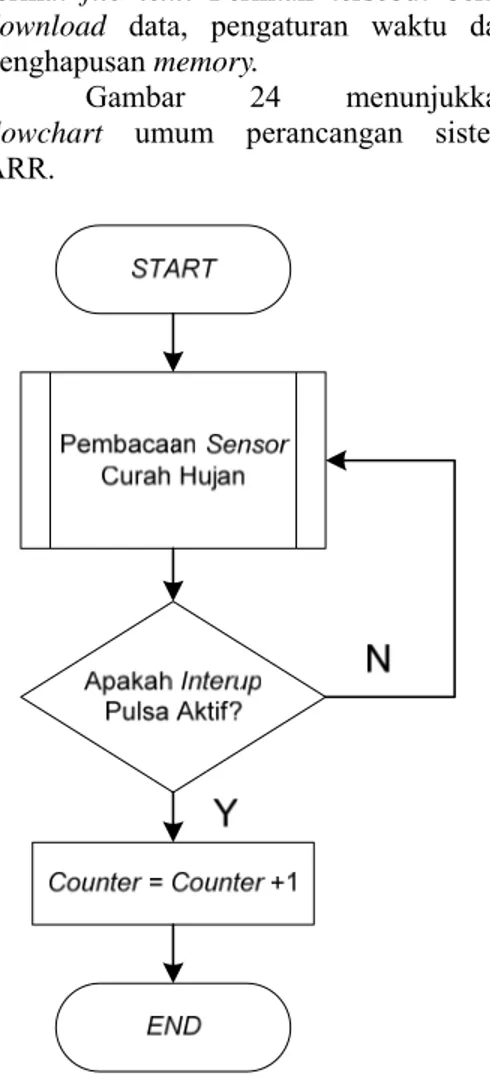
g. Flowchart Penghitung Pulsa (Pembacaan Sensor Curah Hujan)
Penghitungan pulsa pada pembacaan sensor curah hujan dilakukan
dengan menghidupkan fungsi interup pada microcontroller yang ditunjukkan pada Gambar 23. Jika sensor curah hujan aktif maka microcontroller akan membacanya dengan melakukan penghitungan jumlah pulsa yang terjadi karena reed switch yang ada dalam sensor curah hujan dalam kondisi high akibat air hujan yang menggerakkan jungkitan pada sensor tersebut. Penghitungan pulsa tersebut dilakukan secara terus menerus kemudian menyimpannya ke dalam memory tiap satu jam.
h. Flowchart Komunikasi PC
Proses komunikasi dilakukan jika ada interuksi dari PC. Perintah yang masuk dikirim melalui serial dengan format file text. Perintah tersebut berisi download data, pengaturan waktu dan penghapusan memory.
Gambar 24 menunjukkan flowchart umum perancangan sistem ARR.
Gambar 23. Flowchart penghitung pulsa (pembacaan sensor).
H H t d t s m d y H d m k t p d s y L P S E Apa perin P Ap pe dow d Ap perint w Ap perint data m Y N N N N Gambar 24 Hasil Uji L Hujan Berda telah dilak diketahui kes telah dii spesifikasi mengetahui k dilakukan su yang telah Hasil dari p dimanfaatkan mana keber kekurangan tersebut dapa penyempurna digunakan se selanjutnya. Terda yang dilak Labratorium Pengujian la TART END kah ada ntah dari PC? pakah erintah wnload data? pakah ah setting aktu? pakah tah hapus memory? Y Y Y . Flowchart k apang dan asarkan per kukan sebel sesuaian kine implementasik perancang kinerja alat uatu proses p diimplementa pengujian se n untuk mem rhasilan per sistem, sehin at digunakan aan kinerja ebagai dasar apat 2 pengu kukan, yai dan pengu aboratorium b Kirim data ke Setting data R Hapus data omunikasi PC. Analisa Cur ancangan y lumnya, in erja sistem y kan den gan. Un ini maka pe pengujian sist asikan terseb elanjutnya da mpelajari sej rancangan ngga dari h n sebagai acu a, dan da pengemban ujian kinerja itu penguj ujian Lapang bertujuan un PC RTC a . rah ang ngin ang gan ntuk erlu tem but. apat auh dan hasil uan apat gan alat jian gan. ntuk meng dibua berfu dihar deng peng pemb deng ketep Peng dilak teruk peng param peng peng deng peng Peng meng tipe volum dilak pada terda telah adala curah kalib sebel rangk G men getahui kine at. Jika pada ungsi denga rapkan, ma gan penguj gujian la
bandingan a gan alat dari B patan kinerja gujian Labor Pada p kukan berdas kur dari gukuran cura meter yang gujian tipp gujian kinerja gan tipping gukuran curah gujian Tipping Pengujian getahui kiner tipping buc me air yang kukan dengan penampung apat pada sen h ditentukan. ah 6.28 mm3 h hujan 0.2 brasi yang lumnya. Ga kaian penguji Gambar 25. Pe nggunakan pip kamera erja alat y pengujian in an baik se aka akan ian lapang apangan alat yang te BMKG untuk sistem. ratorium engujian la sarkan varia sistem, pad ah hujan ot akan diuk ing bucke alat, serta pe bucket sen h hujan. g Bucket Sens n ini bertuj rja sensor c cket terhadap tertampung n cara mem g kedua jung sor dengan v Volume yang untuk setiap 2 mm sesu g telah ambar 25 ian tipping bu engujian tipping pet. (Difoto me a digital 9 MP) yang sudah ni alat dapat esuai yang dilanjutkan gan. Pada dilakukan elah dibuat mengetahui aboratorium abel-variabel da sistem tomatis ini, kur adalah et sensor, engujian alat nsor dalam sor juan untuk curah hujan p ketepatan . Pengujian mberikan air gkitan yang volume yang g digunakan p ketinggian uai dengan dilakukan merupakan ucket. g bucket enggunakan )
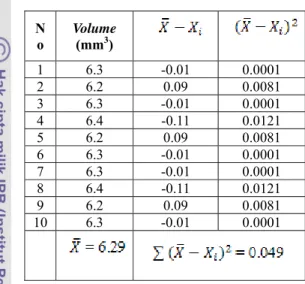
Tabel 1 berikut menunjukkan hasil pengujian tipping bucket sensor dengan menggunakan pipet tipe morh untuk memasukkan air ke dalam penampung.
Tabel 1 Hasil Pengujan Tipping Bucket Sensor.
N o Volume (mm3) 1 6.3 -0.01 0.0001 2 6.2 0.09 0.0081 3 6.3 -0.01 0.0001 4 6.4 -0.11 0.0121 5 6.2 0.09 0.0081 6 6.3 -0.01 0.0001 7 6.3 -0.01 0.0001 8 6.4 -0.11 0.0121 9 6.2 0.09 0.0081 10 6.3 -0.01 0.0001
Dari hasil pengujian dapat dicari penyimpangan nilai rata-rata sampel terhadap nilai besaran fisis sebenarnya yang dinyatakan sebagai suatu deviasi standar rata-rata sampel, yang dirumuskan. 26
Dimana :
X = Besaran fisis yang diukur; = Nilai terbaik pengganti nilai
besaran fisis yang sebenarnya; = Nilai percobaan ke-i;
n = Jumlah percobaan yang dilakukan; = Standar deviasi rata-rata sampel.
∆
Diperoleh nilai ∆X = 0.0233 mm dan = 6.29 mm.
Suatu percobaan dikatakan memiliki ketelitian tinggi jika kesalahan
percobaan (∆X) kecil. Dan suatu percobaan dikatakan memiliki ketepatan tinggi jika kesalahan sistematik percobaan tersebut kecil. Secara matematik ketelitian dan ketepatan suatu percobaan dapat ditulis sebagai berikut :
Dimana :
H = Harga seharusnya;
= Harga rata-rata hasil percobaan.
Dari data percobaan diperoleh nilai ketelitian sebesar 99.63% sedangkan ketepatannya 99.84%.
Pengujian Kinerja Alat
Pengujian kinerja alat dilakukan dengan pengisian pengaturan ke dalam program ATmega8 yang dimasukkan menggunakan hyperterminal melalui fasilitas send file text. Pengujian berupa pengisian file pengaturan sesuai dengan yang dibutuhkan. Pada perancangan sistem, penyusunan data diberi tambahan atribut HEADER untuk menentukan awal data dan STOP untuk menetukan akhir data, sedangkan nilai data berada di antaranya. Tujuan dari pemberian atribut adalah untuk mengenali data yang dikirimkan oleh data logger ke terminal unit. Gambar 26 merupakan hasil pembuatan dan pengujian alat ARR dan Gambar 27 merupakan proses Pengiriman file text menggunakan fasilitas hyperterminal.
d Gambar 26. menggun Gambar 27. Pe hypertermina Data dimasukkan m 1. Status ala Pengatura untuk m sebagai b R,S,* Huruf “R file peng merupaka status a tulisan be ARR,01, Kode “ bahwa fil status kea . Pengujian ala nakan kamera d engiriman file t l. (Diambil den pada kompute pengat meliputi: at an yang dik mendapatkan berikut : R” merupaka gaturan, sed an perintah un lat. ARR a erupa : hh:mm:ss,dd “01” merup le ini membe adaan terakhir at ARR. (Difoto digital 9 MP) text mengguna
ngan print scre er) turan y kirim ke sist status terak an header un dang huruf ntuk mengeta akan mengi d:mm:yy,aa,,* pakan petun erikan inform r. o akan een ang tem khir, ntuk “S” ahui irim * njuk masi 2. D U f R H b p d G D p A 0 0 , K -Gam AR Gam ter Download dat Untuk pengatu file.txt dengan R,D,* Huruf “D” bahwa file pen perintah ke s download dat Gambar 28. Data disim penulisan: ARR,02,aa,hh 02,003,004,00 011,012,013,0 020,021,022, Keterangan : - ARR : head - 02 : kode pe - aa : urutan d - hh:mm:ss : - dd:mm:yy : - 1-24 : curah - * : penutup. mbar 28. Down RR ke PC. (Dia pada mbar 29. Form rsimpan dalam f print scree ta uran bagian i n isi : merupakan ngaturan ini m sistem untuk ta yang ditunj mpan denga h:mm:ss,dd:m 05,006,007,00 014,015,016,0 023,024* der (pengenal enyimpanan d data; jam:menit:de tanggal/bula h hujan perjam .
nload data cura
ambil dengan p a komputer)
mat data curah h file.txt. (Diam en pada kompu ni diberikan penunjuk memberikan melakukan jukkan pada an format mm:yy,001,0 08,009,010, 017,018,019 data); data; etik; n/tahun; m; ah hujan dari print screen hujan yang mbil dengan uter)
Format data yang tersimpan ditunjukkan pada Gambar 29.
Atribut tanggal, bulan dan tahun pada pembuatan file ini disimpan di dalam EEPROM dengan memanfaatkan data tanggal, bulan dan tahun yang diambil dari RTC. Hal ini bertujuan untuk mempermudah inventarisasi sistem back up data.
3. Hapus data
Penghapusan data dari EEPROM dilakukan dengan memsaukkan file pengaturan yang berisi :
R,E,*
Huruf “E” merupakan kode untuk perintah hapus data.
4. Pengaturan waktu
Pengaturan waktu dilakukan dengan file yang berisi tulisan waktu pada saat itu, dengan format penulisan : R,T, hh:mm:ss,dd:mm:yy *
“T” merupakan perintah pengaturan waktu. Untuk “hh:mm:ss” diisi sesuai dengan jam, menit, detik. Sedangkan “dd:mm:yy” berupa hari, tanggal dan tahun. Secara otomatis waktu di RTC akan sesuai dengan pengaturan yang telah ditentukan.
Pengujian Alat dengan Tipping Bucket Sensor dalam Pengukuran Curah Hujan
Setelah dilakukan pengujian tipping bucket sensor dan kinerja alat, selanjutnya alat dan sensor tersebut dipasang pada tempat terbuka untuk pengujian pengukuran curah hujan. Pengujian dilakukan pada bulan November 2010. Data yang tercatat kemudian disimpan ke dalam file.txt dan selanjutnya diolah dalam microsoft exel. Hasil pengukuran curah hujan kemudian dibandingkan dengan hasil yang didapat dari BMKG Darmaga yang diukur dengan menggunakan penakar hujan jenis Hellman dan Observatorium.
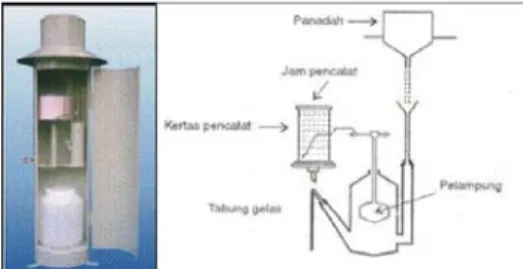
a. Penakar Hujan Jenis Hellman
Penakar hujan jenis Hellman termasuk penakar hujan yang dapat mencatat sendiri. Jika hujan turun, air hujan masuk melalui corong yang berdiameter 16cm dan dipasang
dengan tinggi 1.2m dari permukaan tanah. Air yang masuk ke dalam corong kemudian terkumpul dalam tabung tempat pelampung. Air ini menyebabkan pelampung serta tangkainya terangkat (naik). Pada tangkai pelampung terdapat tongkat pena yang gerakkannya selalu mengikuti tangkai pelampung. Gerakkan pena dicatat pada pias yang digulung pada silinder jam yang dapat berputar dengan bantuan tenaga per. Jika air dalam tabung hampir penuh, pena akan mencapai tempat teratas pada pias. Setelah air mencapai atau melewati puncak lengkungan selang gelas, air di dalam tabung akan keluar sampai ketinggian ujung selang dalam tabung dan tangki pelampung dan pena turun dan pencatatannya pada pias merupakan garis lurus vertikal. Dengan demikian jumlah curah hujan dapat ditentukan dengan menghitung jumlah garis-garis vertikal yang terdapat pada pias. Penakar hujan tipe Hellman ditunjukkan pada Gambar 30.12
b. Penakar hujan Observatorium
Penakar hujan Observatorium (OBS) adalah jenis penakar hujan manual. Jumlah air hujan yang tertampung diukur dengan gelas ukur yang telah dikonversi dalam satuan tinggi. Diameter corong sebesar 1 cm dan dipasang dengan tinggi 1.2m dari permukaan tanah. Pengamatan dilakukan sekali dalam 24 jam yaitu pada pagi hari. Hujan yang diukur pada pagi itu adalah data hujan satu hari kemarin. Penakar hujan OBS ditunjukkan pada Gambar 31.12
Pengujian Lapangan
Pengujian pertama dilakukan dengan cara membandingkan alat yang telah dibuat dengan penakar curah hujan dari BMKG yang terletak di Darmaga. Alat dipasang berdekatan dengan penakar hujan tipe Hellman. Pemasangan dilakukan pada tanggal 1 Desember 2010 yang terlihat pada Gambar 32.
Data yang tersimpan kemudian dibandingkan untuk mengetahui ketepatan, kesalahan serta resolusi dari alat yang diuji dengan data pembanding yang berasal dari penakar hujan Hellman dan Observatorium.
Gambar 31. Penakar Hujan OBS. (Difoto
dengan kamera digital 9 MP)
Gambar 32. Pemasangan ARR dengan penakar hujan tipe Hellman. (Difoto menggunakan
kamera digital 9 MP)
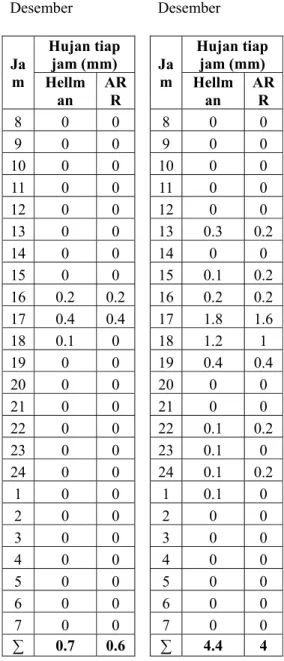
Tabel 2. Hasil Pengamatan di Stasiun Klimatologi Klas 1, Darmaga, Bogor pada tanggal 1 dan 4 Desember 2010. Data Tanggal 1 Desember Data Tanggal 4 Desember Ja m Hujan tiap jam (mm) Ja m Hujan tiap jam (mm) Hellm an AR R Hellm an ARR 8 0 0 8 0 0 9 0 0 9 0 0 10 0 0 10 0 0 11 0 0 11 0 0 12 0 0 12 0 0 13 0 0 13 0.3 0.2 14 0 0 14 0 0 15 0 0 15 0.1 0.2 16 0.2 0.2 16 0.2 0.2 17 0.4 0.4 17 1.8 1.6 18 0.1 0 18 1.2 1 19 0 0 19 0.4 0.4 20 0 0 20 0 0 21 0 0 21 0 0 22 0 0 22 0.1 0.2 23 0 0 23 0.1 0 24 0 0 24 0.1 0.2 1 0 0 1 0.1 0 2 0 0 2 0 0 3 0 0 3 0 0 4 0 0 4 0 0 5 0 0 5 0 0 6 0 0 6 0 0 7 0 0 7 0 0 ∑ 0.7 0.6 ∑ 4.4 4
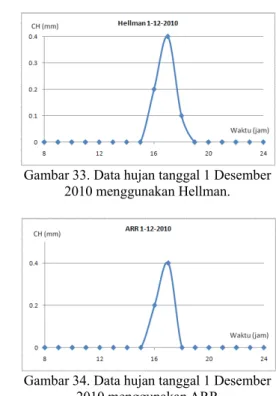
Gambar 33. Data hujan tanggal 1 Desember 2010 menggunakan Hellman.
Gambar 34. Data hujan tanggal 1 Desember 2010 menggunakan ARR
Gambar 33 dan 34 merupakan data curah hujan yang terukur menggnakan Hellman dan ARR pada tanggal 1 Desember 2010. Sedangkan Gambar 35 dan 36 merupakan data curah hujan yang terukur menggnakan Hellman dan ARR pada tanggal 4 Desember 2010.
Gambar 35. Data hujan tanggal 1 Desember 2010 menggunakan Hellman.
Gambar 36. Data hujan tanggal 4 Desember 2010 menggunakan ARR.
Dari data yang diperoleh dapat dicari nilai ketepatan yang terukur oleh ARR dengan membandingkan data hasil pengukuran penakar hujan tipe Hellman. Ketepatan dan kesalahan dapat dicari dengan menggunakan rumus :
1 100%
100%
Ketepatan pengukuran pertama, tanggal 1 Desember 2010 : 1 0.7 0.6 0.7 100% 85.7% 0.7 0.6 0.7 100% 14.3%
Ketepatan pengukuran kedua, tanggal 4 Desember 2010 1 4.4 4 4.4 100% 90.9% 4.4 4 4.4 100% 9.1% 1 2 2 85.7% 90.9 2 88.3% 1 2 2 14.3% 9.1 2 11.7%
Nilai rata-rata ketepatan dan kesalahan yang didapat dari kedua pengukuran sebesar 88.3% dan 11.7%. Data yang terukur tidak terlalu jauh dengan data kalibrator dari BMKG. Terdapat sedikit perbedaan pengukuran saat terjadi hujan, ini dikarenakan resolusi alat yang diuji sebesar 0.2 mm sedang
resolusi kalibrator sebesar 0.1 mm. Perbedaan pengukuran dikarenakan tipping bucket sensor akan bergerak jika volume penampung sudah 0.2 mm, jika kurang dari itu maka tidak ada respon apapun dari sensor, sehingga saat hujan di bawah 0.2 mm, alat tidak melakukan pengukuran.
Pengujian kedua dilakukan dengan meletakkan alat yang telah dibuat berlainan tempat dengan alat pengkalibrasi milik BMKG. Pemasangan alat terletak di Semplak, kecamatan Bogor Barat yang berjarak sekitar 15 km dari Stasiun Klimatologi Klas 1, Darmaga Bogor.
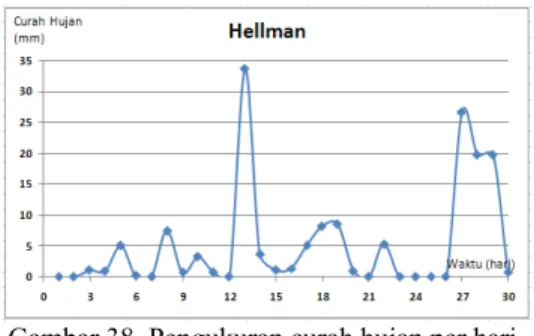
Dari hasil pengukuran didapat data curah hujan dari masing-masing alat, untuk ARR dan Hellman diperoleh data curah hujan per jam, sedang untuk observatorium hanya data perhari saja. Gambar 37, 38 dan 39 merupakan pengukuran curah hujan per hari menggunakan OBS, Hellman dan ARR. Nilai curah hujan berbeda karena tempat pemasangan alat tidak dalam satu wilayah. Tetapi dari pola yang terbentuk, terlihat bahwa intensitas hujan dalam satu hari hampir sama. Besarnya intensitas curah hujan ini berbeda-beda tergantung dari lamanya curah hujan dan frekuensi kejadiannya. Intensitas curah hujan yang tinggi pada umumnya berlangsung dengan durasi pendek dan meliputi daerah yang tidak luas. Hujan yang meliputi daerah luas, jarang sekali dengan intensitas tinggi, tetapi dapat berlangsung dengan durasi cukup panjang.
Gambar 37. Pengukuran curah hujan per hari menggunakan Observatorium.
Gambar 38. Pengukuran curah hujan per hari menggunakan Hellman.
Gambar 39. Pengukuran curah hujan per hari menggunakan ARR.
Dari Gambar 37, 38 dan 39 dapat disimpulkan bahwa alat yang dibuat yaitu ARR (Automatic Rain Recorder) dapat berfungsi dengan baik. Alat dapat bekerja dengan sensor dan menyimpan data kedalam EEPROM sesuai dengan waktu terjadinya hujan. Microcontroller dapat melakukan pembacaan sensor curah hujan, menggabungkannya dengan sistem perwaktuan RTC, menyimpan data ke dalam EEPROM dan mengirimkannya dalam bentuk data serial jika terjadi komunikasi dengan PC. Data yang tersimpan dalam file text dapat langsung dibuat grafik dengan menggunakan microsoft exel tanpa harus memasukkan satu persatu seperti pada pengukuran yang dilakukan dengan cara manual. Karena penyimpanan data dilakukan secara otomatis, maka untuk pengambilan data tidak perlu dilakukan secara rutin. Data curah hujan tidak akan hilang selama sistem bekerja secara normal dan masih ada catu daya untuk menghidupkan sistem.
KESIMPULAN DAN SARAN Kesimpulan
Berdasarkan hasil pengamatan, pengujian dan analisis hasil perancangan yang dibuat dapat diperoleh beberapa kesimpulan sebagai berikut :
1. Sistem Automatic Rain Recorder (ARR) yang dirancang mampu mengukur curah hujan dan dapat menyimpan data dengan baik. Alat dapat bekerja dengan sensor dan menyimpan data kedalam EEPROM sesuai dengan waktu terjadinya hujan. Microcontroller dapat melakukan pembacaan sensor curah hujan, menggabungkannya dengan sistem perwaktuan RTC, menyimpan data ke
dalam EEPROM dan mengirimkannya dalam bentuk data serial jika terjadi komunikasi dengan PC. Data curah hujan yang disimpan dapat langsung dimasukkan ke dalam microsoft exel tanpa harus mengetik ulang sehingga memudahkan dalam pengolahan dan analisis data.
2. Tingkat keakurasian tipping bucket sensor tegantung dari ketepatan kalibrasi sensor tersebut. Hasil pengujian diperoleh nilai ketepatan sebesar 88.3%. Adanya perbedaan data yang didapat antara alat yang diuji dengan kalibratornya dikarenakan perbedaan resolusi kedua alat tersebut. Resolusi kalibratornya adalah 0.1 mm sedangkan resolusi tipping bucket sensor yang digunakan sebesar 0.2 mm. Ini menyebabkan jika hujan dibawah 0.2 mm maka tipping bucket sensor tidak dapat membacanya sehingga terjadi perbedaan data.
3. Penyimpanan data ARR dilakukan secara otomatis, sehingga pengambilan data curah hujan tidak perlu dilakukan secara rutin seperti pada penakar hujan manual. Data
curah hujan tidak akan hilang selama sistem bekerja dengan normal dan masih ada catu daya untuk menjalankan sistem.
Saran
Untuk pengembangan lebih lanjut dapat ditambahkan suatu sistem telemetri agar pengamatan dapat dilakukan secara real time. Penggunaan SD Card dapat memudahkan dalam melakukan download data, sehingga tidak perlu lagi melakukan komunikasi serial untuk pengambilan data dan juga kapasitas untuk menyimpan data curah hujan semakin besar. Untuk pengamatan dalam jangka watktu yang lama dapat menggunakan solar panel dan juga accu sebagai sumber tegangan untuk menjalankan sistem.
DAFTAR PUSTAKA 1. Amien, I., Pawitan, H. & Pasandaran,
E. (2005). Sistem Informasi Sumberdaya Iklim dan Air. Bogor: Balitklimat.
2. Prawirowardoyo, S. (1996). Meteorologi. Bandung: ITB.
3. Kartasapoetra, A. G. (2006). Klimatologi Pengaruh Iklim Terhadap Tanah dan Tanaman Edisi Revisi. Jakarta: PT Bumi Aksara.
4. Nasir, A. A. & Manan, M. E. (1980). Alat – Alat Pengukur Cuaca di Stasiun Klimatologi Pertanian. Bogor: IPB.
5. Karim, K. (1985). Diktat Kuliah Dasar-Dasar Klimatologi. Banda Aceh: Universitas Syiah Kuala.
6. Jumin, Basri, H. (2002). Agroekologi Suatu Pendekatan Fisiologi. Jakarta: PT
Raja Grafindo Persada.
7. Sutedjo, Suryani, M. & Kartasapoetra. (2005). Pengantar Ilmu Tanah. Jakarta : PT Rineka Cipta.
8. Rao, N., S., Subba, (1994). Mikroorganisme Tanah dan Pertumbuhan
Tanaman. Jakarta: Universitas Indonesia.