Fakultas Ilmu Komputer
Universitas Brawijaya
7743
Implementasi Maze Mapping pada Robot Line Follower untuk menentukan
Shortest Path
Yurliansyah Hirma Fajar1, Dahnial Syauqy2, Rizal Maulana3
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Dalam menelusuri sebuah labirin, selain menemukan jalan keluar atau titik finish, robot akan lebih efisien jika dapat menemukan rute terpendek dari labirin tersebut. Robot Line Follower yang digunakan untuk menyelesaikan labirin berbentuk garis ini menggunakan sensor TCRT5000 yang terdiri dari 5 sensor infrared sebagai mata untuk mendeteksi jalur garis hitam dari labirin. Dalam menelusuri labirin, robot menggunakan aturan right hand rule. Proses mapping menggunakan metode Maze Mapping untuk menyimpan kode array, kemudian robot akan menyederhanakan kode yang telah didapatnya, dengan menggunakan algoritma shortest path, sehingga pada saat robot akan dijalankan kembali, robot langsung berjalan sesuai dengan jalur yang telah disederhanakan. Hasil akhir penelitian ini adalah pebandingan waktu dan panjang jarak mulai dari awal hingga finish¸ pada robot yang menggunakan
maze mapping, dengan robot yang tidak menggunakannya. Hasil pengujian dari mendeteksi garis hitam
yang dilakukan oleh sensor TCRT5000 sebanyak 10 kali dengan masing-masing sensor infrared mempunyai tingkat error 0%. Hasil pengujian mapping sebanyak 57 kali, menghasilkan robot bergerak sesuai dengan kondisi line dan input dari sensor infrared, kemudian penyimpanan data array juga sesuai dengan pergerakan dari robot tersebut. Rata-rata waktu dan jarak yang ditempuh mulai start hingga
finish, untuk robot yang tidak menggunakan maze mapping dan shortest path sebesar 28,1 detik dan 364
cm, dengan 6 kali pengujian. Sedangkan Rata-rata waktu dan jarak yang ditempuh mulai start hingga
finish untuk robot yang menggunakan maze mapping dan shortest path adalah 17,27 detik dan 284,5 cm
dengan 6 kali pengujian. Maka robot yang menggunakan maze mapping dan shortest path lebih cepat 10,83 detik dan memperpendek jarak tempuh sebesar 79,5 cm.
Kata kunci: Robot, maze mapping, right hand rule, line follower, shortest path Abstract
In tracing a maze, in addition to finding a way out or a finish point, the robot will be more efficient if it can find the shortest route of the maze. The Line Follower Robot used to complete this line-shaped maze uses a TCRT5000 sensor consisting of 5 infrared sensors as an eye to detect the black line path of the maze. In tracing the maze, the robot uses the right hand rule rules. The mapping process using Maze Mapping method to save code of the array, then the robot will simplify the code that has been used, by using the shortest path algorithm, so that when the robot start again, robots will run according to the simplified path. The final result of the study is the comparison of time and the length distance from start to finish ̧ robots that use maze mapping, compare robots that do not use it. The test results of detecting black lines performed by the TCRT5000 sensors with 10 times experiments, each infrared sensor has a 0% error rate. The test results in mapping with 57 times experiments, generating robots moving according to the condition of the line and input from the infrared sensor, then the storage of the data array also corresponds to the movement of the robot. The average time and distance is taken from start to finish, for robot that do not use maze mapping and shortest path is 28.1 seconds and 364 cm, with 6 test times. While the average time and distance traveled start to finish for robots that use maze mapping and shortest path is 17.27 seconds and 284.5 cm with 6 test times. Then the robot that uses maze mapping and shortest path is faster 10.83 seconds and shorten the distance of 79.5 cm.
1. PENDAHULUAN
Robot yang mengacu kepada garis hitam disebut dengan robot line follower. Jenis garis yang digunakan biasa berwarna hitam di atas alas berwarna putih, ataupun garis putih di atas alas berwarna hitam. Adanya perbedaan warna yang menonjol tersebut, maka robot line
follower dapat membaca jalur yang dilewatinya
(Suyadhi, 2008). Selain dalam memudahkan pekerjaan manusia, robot juga diikutkan dalam perlombaan baik di dalam negeri maupun luar negeri. Salah satu contohnya adalah Robot Pemadam Api pada Kontes Robot Indonesia.
Goal dari perlombaan ini adalah robot pemadam
api, mencari titik api yang diletakkan dalam sebuah labirin secara acak, dan berlomba secepat mungkin untuk memadamkannya (Sutrisna, 2014).
Labirin atau yang dapat disebut dengan maze merupakan jaringan jalan yang kompleks dan memiliki banyak percabangan. Robot beroda dalam mengatasi jalan rumit dan memiliki banyak bercabangan dapat menggunakan metode simple maze (Udani, et al., 2011). Untuk melakukan proses mapping, yaitu menulusuri jalan keluar dari maze, kemudian memetakan jalur tersebut dapat menggunakan metode maze
mapping (Mishra, 2008). Robot line follower
tidak hanya dapat mengikuti garis hitam dalam sebuah maze saja, namun juga harus dapat mencari jalan keluar dari maze tersebut (Farhan, et al., 2014). Pada implementasi maze mapping pada robot line follower ber-opsi-kan berjalan mengikuti garis kiri atau garis kanan pada proses
mapping. Apabila robot dalam mengikutin garis
kanan atau dapat disebut dengan right hand rule, robot memprioritaskan garis kanan dahulu ketika melewati percabangan, apabila garis kanan tidak ada, maka robot akan mengikuti garis lurus, kemudian apabila garis kanan, dan lurus tidak ada, maka robot akan mengikuti garis sebelah kiri. Setelah melakukan mapping, kemudian robot memulai kembali dari titik start yang sama dan langsung dapat menemukan jalur yang lebih pendek dari sebelumnya, hingga menuju titik
finish.
Penelitian yang sebelumnya dilakukan oleh Indrawan (2008) dengan judul “Implementasi Metode Simulated Annealing pada Robot Mobil untuk Mencari Rute Terpendek” pada penelitian ini metode yang digunakan dalam mencari rute terpendek pada robot beroda adalah metode
Simulated Annealing. Dalam pengaplikasiannya,
posisi tujuan, posisi awal, arah dan annealing
schedule dari robot diolah menggunakan
mikrokontroler tipe AT89S51.
Kemudian penelitian yang dilakukan oleh Prasetyo (2010) dengan judul “Sistem Gerak Robot Line follower Menggunakan Motor DC Berbasis Mikrokontroler ATMega8535 Dengan Sensor Photodioda”. Dalam penelitan ini merancang robot line follower dan menggerakkan motor DC menggunakan mikrokontroler Atmega8535 dengan sensor photodioda untuk mendeteksi garisnya. Sistem ini merupakan suatu sistem robot bergerak dengan mengikuti garis sesuai dengan kecepatan yang telah ditentukan sesuai dengan kondisi garis.
Dari Pernyataan di atas, maka penulis akan membuat sebuah robot line follower yang dapat menelusuri labirin atau maze dengan acuan right
hand rule dan menggunakan metode Maze Mapping. Kemudian Robot line follower
menggunakan algortime shortest path untuk menentukan jalur terpendek. Supaya, waktu yang ditempuh untuk mencapai titik finsih akan lebih efektif. Maka diambil tema dengan judul “Implementasi Maze Mapping Pada Robot Line
Follower Untuk Menentukan Shortest Path” 2. METODOLOGI PENELITIAN
Berdasarkan metodologi penelitian yang ada, terdapat beberapa proses, proses yang pertama adalah studi dan pengkajian Literatur, proses yang kedua yaitu analisis dan kebutuhan sistem, proses yang ketiga adalah perancangan sistem, setelah itu proses yang keempat adalah implementasi sistem. Apabila pada implementasi sistem tidak sesuai dengan output yang diharapkan, maka proses akan kembali ke implementasi sistem, dan mengulang proses tersebut hingga selesai. Setelah output sesuai dengan yang diharapkan, kemudian proses yang kelima yaitu pengujian dan analisi. Kemudian proses yang keenam dan terakhir adalah pengambilan kesimpulan.
3. PERANCANGAN DAN IMPLEMENTASI
3.1. Gambaran Umum Sistem
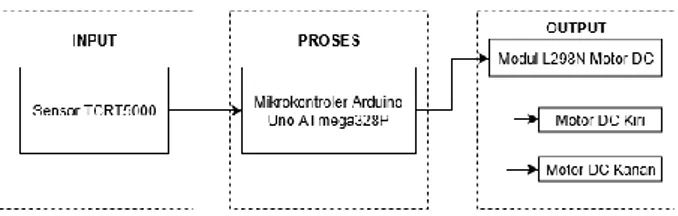
Pada gambaran umum system terdapat 3 bagian, yaitu input sistem berasal dari input sensor, yaitu TCRT5000. Kemudian Proses mikrokontroler Arduino Uno ATmega328P, dan output dari sistem merupakan pergerakan roda Motor DC. Diagram blok dari sistem akan
ditampilkan pada Gambar 1.
Gambar 1. Skematik Perangkkat Keras Sistem
Gambar 1 merupakan gambaran umum rancangan dari sistem, terdiri dari tiga, Input,
proses, dan output. Pada bagian input
menggunakan sensor TCRT5000 yang terdiri dari garis hitam. Kemudian setelah pembacaan data dari sensor, akan diproses oleh mikrokontroler Arduino Uno berdasarkan metode Mapping dan algoritme Shortest Path. Kemudian output yang dikeluarkan adalah pergerakan roda yang dikendalikan oleh Modul L298N Motor DC dan dua buah Motor DC, agar robot dapat bergerak menelusuri labirin sampai titik finish, kemudian mencari rute terpendeknya.
3.2. Perancangan Perangkat Keras
Perancangan perangkat keras sistem ditampilkan pada gambar 2 dan gambar 3
Gambar 2. Skematik Perangkat Keras Tampak Atas
Gambar 3. Skematik Perangkat Keras Tampak Bawah
Gambar 2 adalah rancangan prototype dari robot line follower tampak dari atas. Pada bagian depan, terdapat Modul L298N Driver DC,.
Kemudian pada bagian tengah terdapat lubang sebagai tempat masuk kabel dari sensor TCRT5000 nantinya. Lalu pada bawah lubang merupakan tempat diletakkanya mikrokontroler Arduino uno yang berfungsi untuk mengolah data dari sensor, dan disebelah kiri merupakan tempat sumber tenaga, yaitu baterai 9V. Pada bagian tepi kiri dan kanan merupakan tempat dari motor DC sebagai penggerak dari robot. Motor DC disertai dengan roda. Badan robot ini menggunakan papan akrilik berwarna hitam yang kokoh, selain berfungsi sebagai tempat menempatkan komponen-komponen sistem
Pada Gambar 3 menampilkan rancangan
prototype robot line follower, tampak dari
bawah. Pada bagian depan robot terdapat sensor TCRT5000, sensor tersebut terdiri dari 5 sensor
infrared. Peletakan sensor berada dibawah
karena, pada saat mendeteksi garis hitam, sensor harus bersentuhan dengan permukaan, sehingga sensor harus diletakkan dibawah, agar dapat mendeteksi garis hitam secara akurat. Kabel penghubung sensor dengan mikrokontroler dapat melewati lubang yang telag dibuat sedemikan rupa, agar kabel lebih rapi. Pada bagian kiri dan kanan belakang terdapat motor DC dan roda, sebagai penggerak robot.
3.3. Perancangan Perangkat Lunak
Pada perancangan perangkat lunak yaitu sistem proses shortpath (penyederhanaan jalur),
choosepath (mengganti jalur), shortestpath (rute
jalur terpendek). Akan ditampilkan pada Gambar 4, Gambar 5, dan Gambar 6.
Gambar 4 merupakan flowchart shortpath. Proses penyederhanaan ini yaitu menghilangkan kode array “U”, dikarenakan putar balik jalan buntu dapat dihilangkan sehingga robot tidak harus melewati jalan putar balik tersebut, sehingga jalur menjadi lebih singkat. Penyederhanaan jalur ini berdasarkan pergerakan robot tersebut. Contonya data array yang tersimpan berupa “LUL”, yang artinya robot belok kiri, kemudian putar balik, dan belok kiri lagi, itu sama saja halnya dengan robot bergerak lurus, sehingga data array “LUL” tadi diganti “S” yang artinya lurus dan seterusnya.
Gambar 5 merupakan flowchart Choose
Path, yaitu merubah gerakan Motor DC sesuai
dengan penyederhanaan dari short path. Ketika nilai array berupa “F”, maka robot akan berhenti karena sudah di finish. Dan ketika saat nilai array setelah disederhanakn menjadi “L”, maka robot akan belok kiri.
Gambar 4. Skematik Perangkat Lunak Shortpath
Gambar 5. Skematik Perangkat Lunak Choosepath
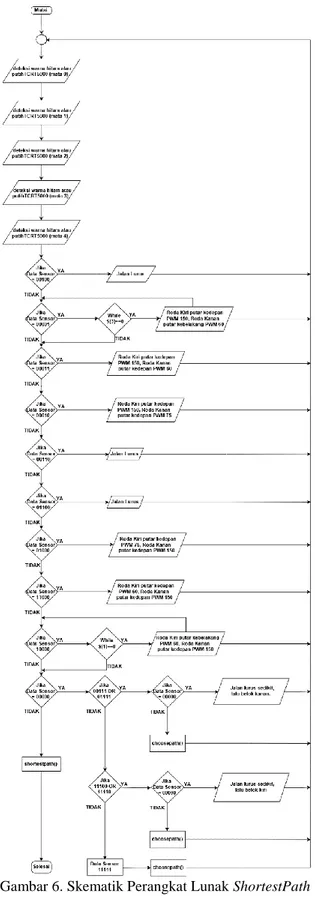
Gambar 6. Skematik Perangkat Lunak ShortestPath
Gambar 6 merupakan flowchart Condition dan proses Mapping ketika robot mendapat input dari sensor. Pergerakan motor dc menyesuaikan dengan kondisi garis hitam yang terbaca oleh sensor TCRT5000, dimana terdapat banyak kemungkinan kombinasi data dari pembacaan sensor. Contohnya adalah ketika sensor membaca garis hitam inputan data berupa
“00100”, yang artinya, bahwa sensor infrared yang berada ditengah membaca adanya garis hitam, sehingga kondisinya robot harus bergerak maju.
Namun terdapat beberapa kondisi dimana robot harus tetap dijalur, sehingga pengaturan PWM sangat berpengaruh. Contohnya pada saat data sensor “11000”, yang artinya sensor paling kiri dan nomor dua kiri membaca adanya garis hitam, tapi robot terlalu kekanan dan akan keluar jalur, sehingga pengaturan PWM sebesar 150 untuk roda sebelah kanan, dan pengaturan PWM roda sebelah kiri sebesar 60, agar robot agak belok ke kiri supaya tetap dilintasannya.
Proses mapping terjadi pada saat robot melewati persimpangan, jalan buntu, dan garis finish. Proses mapping yaitu menyimpan kode data berupa array, pada saat robot belok kanan, putar balik, dan robot sampai garis finish. Dengan pemberian kode berupa “R” untuk belok kanan, “U” untuk putar balik, “S” untuk melewati persimpangan yang ada belok kirinya, dan “F” ketika finish. Contohnya ketika data sensor “11111” artinya robot sudah tiba digaris
finish dan kode array yang disimpan adalah “F”.
Proses penyimpanan kode array ini berguna untuk proses penyederhanaan jalur pada algoritme shortest path nantinya. Proses
mapping ini berlangsung sampain garis finish
ditemukan.
3.4. Implementasi Perangkat Keras
Implementasi prototype Robot Line Follower ini mengacu pada perancangan sub bab
5.1.2. Badan robot dibuat dengan Ukuran Akrilik 16 x 15 x 9 cm3, berwarna hitam. Memiliki ketebalan sebesar 0,22 cm, dengan panjang dan lebar 10 x 16 cm. Implementasi prototype alat ditampilkan pada Gambar 7 dan Gambar 8
Gambar 7. Implementasi Perangkat Keras Robot
Tampak Atas
Gambar 8. Implementasi Perangkat Keras Robot Tampak Atas
3.4. Implementasi Perangkat Lunak
Proses penyederhanaan dari data array yang diperoleh dari proses mapping sebelumnya. Proses penyederhanaan ini yaitu menghilangkan kode array “U”, dikarenakan putar balik jalan buntu dapat dihilangkan sehingga robot tidak harus melewati jalan putar balik tersebut, sehingga jalur menjadi lebih singkat. Penyederhanaan jalur ini berdasarkan pergerakan robot tersebut. Variabel dari array tersebut adalah [x] == “U”, kemudian setiap kondisi terdapat variabel [x-1], yaitu data array sebelum “U” dan variabel [x+1] adalah variabel data array setelah “U”, pada kondisi yang pertama jika kondisi nilai array adalah “LUL”, maka nilai data array tersebut diganti oleh “SOO” atau sama dengan “S”, sehingga, “LUL” itu mewakilkan robot yang belok kiri, kemudian putar balik, dan belok kiri lagi.
Setelah proses penyederhanaan kemudian proses mendeklarasikan gerakan sesuai data
array yang telah disederhanakan, proses
menentukan gerakan arah motor sesuai dengan nilai array yang telah disederhanakan Ketika nilai array berupa “F”, maka robot akan berhenti karena sudah di finish. Dan ketika saat nilai
array setelah disederhanakn menjadi “L”, maka
robot akan belok kiri.
Dan proses terakhir adalah medapatkan rute terpendek dengan kondisi yang mirip dan sama dengan pergerakan robot ketika pada saat proses mapping. Pada saat robot sudah selesai melakukan proses mapping dan mencapai finish, maka robot harus diletakkan ke posisi awal yang sama pada saat proses mapping dilakukan. tapi pada saat robot melewati persimpangan, putar
balik dan titik finish, robot langsung memanggil choosepath dan memilih pergerakan dari data array yang telah disederhanakan tadi.
4. PENGUJIAN DAN ANALISIS
Pengujian yang dilakukan pada sistem terdiri menjadi enam pengujian. Untuk pengujian sistem dapat dilihat pada gambar 9.
Gambar 9. Pengujian dan Analisis
4.1. Pengujian Pembacaan SensorTCRT5000
Masing-masing sensor mendeteksi adanya perubahan warna hitam dan warna putih secara bergantian dan acak, warna hitam secara kasat mata dideteksi oleh sensor dengan nilai 1, sedangkan warna putih secara kasat mata dideteksi oleh sensor dengan nilai 0. Percobaan dilakukan sebanyak 10 kali, untuk mendapatkan hasil yang akurat dan maksimal.
Ditemukan persamaan perubahan warna yang sesuai baik secara kasat mata maupun menggunakan sensor, sehingga rata-rata persentase error sebesar 0%. Maka kinerja dari sensor dikatakan bagus dan akurat. Pengujian Pemberian Nilai PWM dan Arah Putaran Motor DC pada Modul L298N Driver Motor
4.2. Pengujian Pemberian Nilai PWM dan Arah Putar Motor DC Pada Modul L298N
Hasil pengujian putaran arah roda motor DC sesuai dengan PWM dan konisi berputarnya ditunjukkan pada Tabel 1.
Tabel 1. Pengujian Nilai PWM dan Arah Putar
Penguj ian Ke- Kond isi Keterangan Putaran Motor DC Keterangan arah Putaran Motor DC Kiri Kana n kiri kanan 1 Belok Kiri Berpu tar Berpu tar Ke belaka ng Ke depan 2 Jalan Lurus Berpu tar Berpu tar Ke depan Ke depan 3 Belok Kana n Berpu tar Berpu tar Ke depan Ke belaka ng 4 Putar Balik Berpu tar Berpu tar Ke depan Ke belaka ng 5 Berhe
nti Diam Diam
Diam Diam
Arah putar motor DC sesuai dengan kondisi yang diberikan. Modul L298N memutar arah dan PWM pada motor DC sesuai dengan kondisi yang diatur dalam program.
4.3. Pengujian Maze Mapping
hasil dari pengujian Mapping yang dilakukan sebanyak 57 kali, yang dimana setiap kondisi dari Line dan kondisi dari sensor TCRT5000 dilakukan sebanyak 3 kali. Dengan 5 sensor infrared, maka terdapat 25 kombinasi atau setara dengan 32 kemungkinan, namun pada pengujian ini terdapat 57 hasil pengujian dikarenakan jalur line yang dilewati oleh robot tersebut.
Pada saat proses Mapping, apabila
melewati persimpangan dan jalan buntu, maka data array akan disimpan didalam memory sesuai dengan kode yang diberikan, pada percobaan menunjukkan adanya penyimpanan data array ketika robot melewati pertigaan, perempatan, jalan buntu, dan finish. Sebagai contoh, pada percobaan yang ke-40, jalur line melewati pertigaan, kemudian sensor infrared mendeteksi nilai sebesar “00111”, lalu dengan nilai dari sensor tersebut fungsi belok kanan akan dijalankan, sehingga ketika robot belok kanan, maka kode array “R” akan direkam dan disimpan kedalam memory untuk mengindikasikan bahwa robot belok kanan.
4.4. Pengujian Shortest Path
Sebelum robot dapat melakukan Shortest
Path, hal pertama yang dilakukan adalah dengan
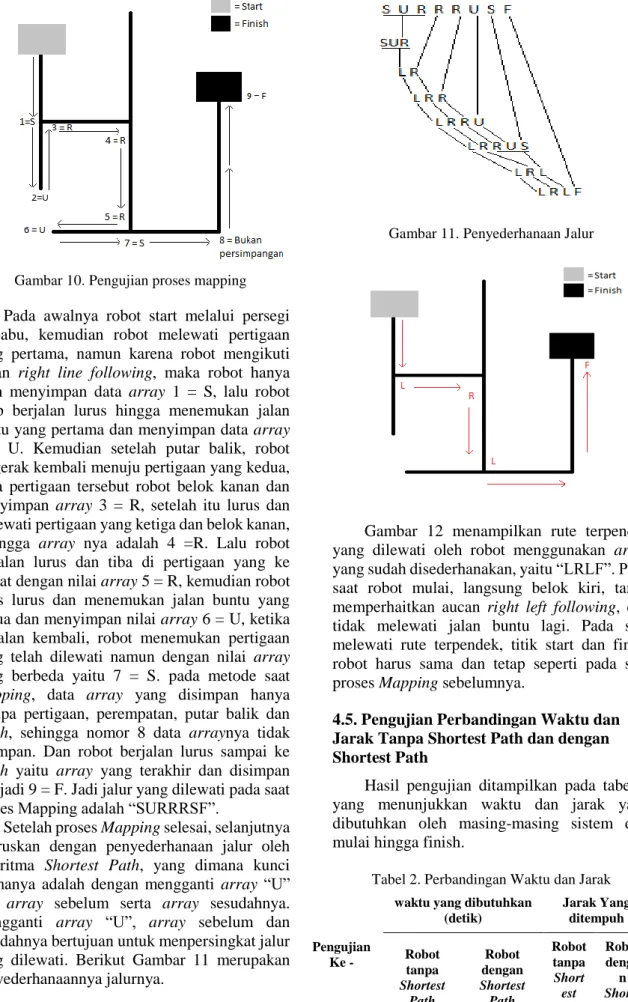
melakukan Mapping. Pada saat proses Mapping, robot melakukan peniympanan kode persimpangan baik berupa pertigaan, maupun perempatan, serta putar balik dan finish. Pada pengujian, robot melewati 5 persimpangan, 2 putar balik dan 1 finish. Pada Gambar 10 akan ditampilkan rute gerakan robot sesuai dengan acuan right line following, yaitu selalu memeriksa bagian kanan terlebih dahulu.
Gambar 10. Pengujian proses mapping
Pada awalnya robot start melalui persegi abu-abu, kemudian robot melewati pertigaan yang pertama, namun karena robot mengikuti acuan right line following, maka robot hanya akan menyimpan data array 1 = S, lalu robot tetap berjalan lurus hingga menemukan jalan buntu yang pertama dan menyimpan data array 2 = U. Kemudian setelah putar balik, robot bergerak kembali menuju pertigaan yang kedua, pada pertigaan tersebut robot belok kanan dan menyimpan array 3 = R, setelah itu lurus dan melewati pertigaan yang ketiga dan belok kanan, sehingga array nya adalah 4 =R. Lalu robot berjalan lurus dan tiba di pertigaan yang ke empat dengan nilai array 5 = R, kemudian robot terus lurus dan menemukan jalan buntu yang kedua dan menyimpan nilai array 6 = U, ketika berjalan kembali, robot menemukan pertigaan yang telah dilewati namun dengan nilai array yang berbeda yaitu 7 = S. pada metode saat
Mapping, data array yang disimpan hanya
berupa pertigaan, perempatan, putar balik dan
finish, sehingga nomor 8 data arraynya tidak
disimpan. Dan robot berjalan lurus sampai ke
finish yaitu array yang terakhir dan disimpan
menjadi 9 = F. Jadi jalur yang dilewati pada saat proses Mapping adalah “SURRRSF”.
Setelah proses Mapping selesai, selanjutnya diteruskan dengan penyederhanaan jalur oleh algoritma Shortest Path, yang dimana kunci utamanya adalah dengan mengganti array “U” dan array sebelum serta array sesudahnya. Mengganti array “U”, array sebelum dan sesudahnya bertujuan untuk menpersingkat jalur yang dilewati. Berikut Gambar 11 merupakan penyederhanaannya jalurnya.
Gambar 11. Penyederhanaan Jalur
Gambar 12 menampilkan rute terpendek yang dilewati oleh robot menggunakan array yang sudah disederhanakan, yaitu “LRLF”. Pada saat robot mulai, langsung belok kiri, tanpa memperhaitkan aucan right left following, dan tidak melewati jalan buntu lagi. Pada saat melewati rute terpendek, titik start dan finish robot harus sama dan tetap seperti pada saat proses Mapping sebelumnya.
4.5. Pengujian Perbandingan Waktu dan Jarak Tanpa Shortest Path dan dengan Shortest Path
Hasil pengujian ditampilkan pada tabel 2 yang menunjukkan waktu dan jarak yang dibutuhkan oleh masing-masing sistem dari mulai hingga finish.
Tabel 2. Perbandingan Waktu dan Jarak
Pengujian Ke -
waktu yang dibutuhkan (detik) Jarak Yang ditempuh Robot tanpa Shortest Path Robot dengan Shortest Path Robot tanpa Short est Path Robot denga n Shorte st Path
1 29,5 17,27 365 cm 285 cm 2 28,23 16,47 363 cm 286 cm 3 27,21 18,16 364 cm 284 cm 4 27,35 17,78 363 cm 284 cm 5 29,35 15,89 365 cm 285 cm 6 26,96 18,05 364 cm 283 cm Rata-Rata 28,1 17,27 detik 364 cm 284,5 cm
Tabel 2. adalah hasil pengujian terhadap Robot Line Follower menggunakan Shortest Path dan yang tidak menggunakan. Pengujian dilakukan sebanyak 6 kali. Pada robot yang tanpa menggunakan Shortest Path
membutuhkan waktu dengan rata-rata 28.1 detik dan menempuh jarak sebesar 364 cm, kemudian untuk robot menggunakan Shortest Path membutuhkan waktu rata rata 17.27 detik dan jarak 284,5 cm, sehingga selisih waktu yang didapat sebesar 28.1-17.27 = 10.83 detik, dan selisih jarak sebesar 364 – 284,5 = 79,5 cm.
5. KESIMPULAN
Berdasarkan hasil dari tahapan perancangan, implementasi, pengujian serta analisis hasil pengujian yang telah dilakukan, penulis dapat menarik kesimpulan bahwa :
Robot mendeteksi garis hitam menggunakan sensor TCRT5000, yang diletakkan didepan robot yang terdapat 5 sensor Infrared. Untuk membedakan garis hitam diatas alas putih, yaitu dengan membandingkan secara kasat mata dan pembacaan sensor. Pengujian dilakukan sebanyak 10 kali, berdasarkan penelitian dan analisis ditemukan persamaan perubahan warna yang sesuai baik secara kasat mata maupun menggunakan sensor, sehingga rata-rata persentase error sebesar 0%. Maka kinerja dari sensor dikatakan bagus dan akurat.
Metode Maze Mapping diimplementasikan untuk melakukan penelusuran jalur dari Start hingga Finish. Dalam penelusurannya robot bergerak mengikuti garis hitam dengan acuan
right line follower, kemudian apabila robot
menemui pertigaan, perempatan, jalan buntu dan
finish maka akan menyimpan kode berupa data array untuk di proses dalam mencari Shortest Path nantinya.
Sebelum robot dapat melakukan Shortest
Path, hal pertama yang dilakukan adalah dengan
melakukan Mapping. Pada saat proses Mapping,
robot melakukan peniympanan kode persimpangan baik berupa pertigaan, maupun perempatan, serta putar balik dan finish. Setelah proses Mapping selesai, selanjutnya diteruskan dengan penyederhanaan jalur oleh algoritma
Shortest Path, yang dimana kunci utamanya
adalah dengan mengganti array “U” (putar balik) dan array sebelum serta array
sesudahnya. Mengganti array “U”, array sebelum dan sesudahnya bertujuan untuk menpersingkat jalur yang dilewati.
Hasil rata-rata waktu dan jarak untuk menemukan finish pada rute line follower, untuk robot tanpa Shortest Path sebesar 28,1 detik dan menempuh jarak sebesar 364 cm, membutuhkan waktu yang lebih lama karena tidak adanya proses mapping dan hanya mengandalkan acuan
Right Linel Following saja. Sedangkan robot
yang menggunakan Shortest Path memiliki rata-rata waktu sebesar 17,27 detik dan jarak sebesar 284,5 cm, sehingga didapatkan selisih sebanyak 10,83 detik perbedaan waktu, dan 79,5 cm perbedaan jarak.
6. DAFTAR PUSTAKA
Anjaswati, I. T., 2013. Sensor Photodioda, Surabaya: UNAIR.
Anon., 2012. Definisi Robot dan Jenis-jenis Robot. [Online] Available at: https://muhnabil.wordpress.com/2012/06 /28/definisi-robot-dan-jenis-jenis-robot/
Arduino, 2017. Arduino Uno Rev3. [Online]
Available at:
https://store.arduino.cc/usa/arduino-uno-rev3
Arduino, 2018. PWM, Amerika: Arduino. Aribowo, T. & Herwanto, H. W., 2011. Kontrol
Motor DC Penggerak Roda Pada Robot Cerdas. Tekno, pp. 41-45.
Bowker, M. & Merriam-Webster, 1922.
Definition of robot_Merriam-Webster.
[Online] Available at:
https://www.merriam-webster.com/dictionary/robot [Diakses 15 April 2019].
Boxall, J., 2014. Tutorial - L298N Dual Motor
Controller Module 2A and Arduino, Australia: Tronixlabs Pty Ltd.
BoxElectronica, 2018. Proximity Sensor /
Obstacles, Travessa, Portugal: BoxElectronica.
Farhan, M. R., Hardienata , S. & Putra, A. P., 2014. Model Maze Mapping Dalam Menentukan Shortest Path.
Gumelar, A. W., 2018. Implementasi Metode
Simple Maze Wall Follower Dengan
Menggunakan Free RTOS Pada Robot Maze. pp. 5816-5824.
Hartanto, W. D., T. & P, W. A., 2004. Analisis dan Desain Sistem Kontrol dengan Matlab. ANDI.
Hendriawan, A. & Akbar, R., t.thn. Penyelesaian Jalur Terpendek dengan menggunakan Algoritma Maze Mapping Pada Line
Maze. p. 2016.
Jatmiko, W. et al., 2012. Jenis Robot. Dalam: RobotikaTeori dan Aplikasi. s.l.:Perpustakaan Nasional: Katalog Dalam Terbitan ISBN:978-979-1421-13-3, pp. 24-26.
Kingstate, 2011. Piezo Buzzer, Tamshui,
Taiwan: Kingstate Electronics
Corporation.
K. et al., 2015. Automatic Color Sorting
Machine Using TCS230 Color Sensor And PIC Microcontroller. International Journal of Research and Innovations in Science and Technology .
Mishra, S., 2008. Maze Solving Algorithm for
Micro Mouse. IEEE International Conference on Signal Image Technology abd Internet Based System.
Multicomp, 2012. Miniature Motor Model
MM10, Indiana: Newark element14 .
Ozdisan, 2018. HC-SR04 Ultrasonik Modul, Intanbul: OZDISAN ELEKTRONİK A.S. Pratama, A., 2007. Analisis Penerapan Algoritma Backtracking Pada Pencarian Jalan Keluar di Dalam Labirin. MAKALAH IF2251 STRATEGI ALGORITMIK, pp. 1-2.
Rus, D., 2011. Robotics systems and science,
Lecture 14: Forward and Inverse [Wawancara] (Spring 2011).
Saman & Abdramane, 2013. simple mapping.
Dalam: s.l.:s.n., p. 22.
Saputro, F. C. & Haryanto, 2015. Robot Maze Solving Untuk Menyelesaikan Tiga Persimpangan. Jurnal Ilmiah Go Infotech, pp. 32-33.
Sulistyowati, R. & Febriantoro, D. D., 2012. PERANCANGAN PROTOTYPE
SISTEM KONTROL DAN
MONITORING PEMBATAS DAYA
LISTRIK BERBASIS
MIKROKONTROLER. Jurnal IPTEK Vol 16 No.1 , p. 27.
Sutrisna, R. Y., 2014. Algoritma Runut-Balik pada Robot Pemadam Api. Makalah IF2211, pp. 1-2.
Suyadhi, D. S., 2008. Build Your Own Line
Follower Robot. Yogyakarta: Penerbit
Andi.
Udani, A., Marhaeni & Jampel, N., 2011. Implementasi Teknik Maze Untuk Mengembangkan Kreativitas Dan Kemampuan Kognitif Anak. Universitas Pendidikan Ganesha Singaraja, Indonesia , pp. 3-4.
Vannoy, R., 2009. Design a Line Maze Solving
Robot.
Yultrisna & Sofiyan, A., 2013. Rancang Bangun Robot Solving Maze Dengan Algoritma Depth First Search. Momentum, p. 87. Zona Elektro, 2013. Motor Servo. [Online]
Available at: