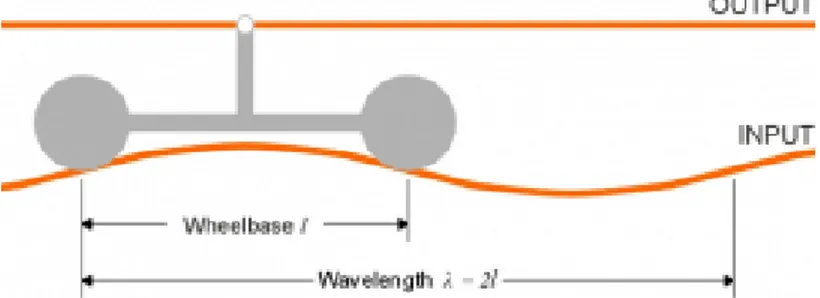
BAB III LANDASAN TEORI. dipahami terlebih dahulu mengenai konsep dasar pengembangan temporary bogie
Teks penuh
Gambar






Dokumen terkait
Hasil penelitian ini mendukung pernyataan Munazah (2010), yang menyatakan bahwa air rebusan mengkudu bersifat sebagai antibakteri. Dimana dalam penelitian ini, air
Dalam blog ini diberikan beberapa contoh perhitungan struktur jembatan beton prategang mulai dari struktur atas yang terdiri dari slab lantai jembatan dan girder
Berdasarkan hasil penelitian, disimpulkan bahwa atribut produk serta citra merek berpengaruh positif dan signifikan terhadap keputusan pembelian Smartphone
WSD merupakan tindakan invasive yang dilakukan untuk mengeluarkan udara, cairan WSD merupakan tindakan invasive yang dilakukan untuk mengeluarkan udara, cairan (darah,pus) dari
Kurangnya sosialisasi yang dilakukan oleh Dinas Pasar dan juga keterbatasan sarana sosialisasi menyebabkan PKL Tlogosari tidak seluruhnya mengetahui program pengaturan dan
12 Dalam penelitian ini peneliti melakukan wawancara secara langsung kepada Juru Pelindung Pengembangan dan Pemanfaatan Benda Cagar Budaya Gapura Masjid Wali
Baca petikan prosa klasik di bawah dengan teliti, kemudian jawab soalan-soalan yang berikutnya dengan menggunakan ayat anda sendiri?. Megat Iskandar dan Megat
Kitab Methoda Al-Qotru merupakan kitab ilmu falak yang digunakan di kalangan LFNU Kabupaten Blitar. Bahasa pengantar kitab ini bukanlah bahasa Arab seperti
