KLASIFIKASI HABITAT DASAR PERAIRAN DENGAN
MENGGUNAKAN INSTRUMEN HIDROAKUSTIK
SIMRAD EY 60 DI PERAIRAN SUMUR,
PANDEGLANG – BANTEN
Oleh :
Obed Agtapura Taruk Allo C64104032
PROGRAM STUDI ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR 2008
PERNYATAAN MENGENAI SKRIPSI DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa Skripsi yang berjudul: KLASIFIKASI HABITAT DASAR PERAIRAN DENGAN
MENGGUNAKAN INSTRUMEN HIDROAKUSTIK SIMRAD EY 60 DI PERAIRAN SUMUR, PANDEGLANG – BANTEN
Adalah benar merupakan hasil karya sendiri dan belum diajukan dalam bentuk apapun kepada perguruan tinggi manapun. Semua sumber data dan informasi yang berasal atau dikutip dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka dibagian akhir Skripsi ini.
Bogor, Juli 2008
Obed Agtapura T.A. C64104032
RINGKASAN
OBED AGTAPURA TARUK ALLO. Klasifikasi Habitat Dasar Perairan Dengan Menggunakan Instrumen Hidroakustik SIMRAD EY 60 di Perairan Sumur, Pandeglang – Banten. Dibimbing oleh SRI PUJIYATI dan
INDRA JAYA.
Biota dasar atau lebih sering dikenal sebagai bentos terdiri dari berbagai jenis dan tipe organisme yang hidup di dasar perairan, baik yang hidup tertancap (lamun, Spongae); merayap (bintang laut, kepiting); maupun yang membenamkan diri di pasir maupun lumpur (kerang-kerangan, cacing). Sebaran dari tipe substrat dasar perairan diketahui mempengaruhi sebaran bentos.
Tujuan dari penelitian ini adalah mengklasifikasikan habitat dasar perairan dengan menggunakan instrumen hidroakustik SIMRAD EY 60 berdasarkan nilai backscattering volume dasar perairan dari berbagai tipe substrat beserta komposisi organisme bentos yang ada pada sedimen. Pengambilan data akustik dilakukan pada tanggal 6 dan 7 September 2007 di perairan daerah Kecamatan Sumur, Kabupaten Pandeglang, Propinsi Banten dengan letak koordinat 6021’ LS – 7010’ LS dan 104048’ BT – 106011’ BT dengan lokasi kedalaman sekitar 3 m – 25 m. Pengolahan dan analisis data mulai dilakukan pada bulan Oktober 2007 dan berakhir hingga bulan Maret 2008. Pengambilan data akustik menggunakan perangkat SIMRAD EY 60 scientific echosounder system, dengan frekuensi operasi 120 kHz.
Pengolahan data perairan Sumur dilakukan dengan menggunakan Echoview 3.5. Klasifikasi dasar perairan dilakukan berdasarkan nilai backscattering volume (E1 dan E2) dari dasar perairan. Komunitas makrozoobenthos dihitung menggunakan indeks-indeks biologi
(Keanekaragaman, Keseragaman, Dominansi dan kepadatan) yang selanjutnya dilanjutkan dengan menggunakan Analisis Komponen Utama (AKU) terhadap data hidroakustik, substrat hasil pengambilan dengan grab dan komunitas makrozoobenthos.
Berdasarkan hasil yang diperoleh dalam pendeteksian dasar perairan dapat dilihat bahwa semakin keras substrat dasar perairan maka nilai backscattering volume dari dasar perairan yang diperoleh akan semakin besar, dan sebaliknya semakin lunak tipe substrat dari dasar perairan maka nilai backscattering volume akan semakin kecil. Berdasarkan nilai backscattering volume dasar perairan, tipe substrat di lokasi penelitian dapat dikelompokkan ke dalam empat tipe yaitu : pasir, pasir berlumpur, lumpur berpasir dan lumpur. Hasil pengukuran komunitas makrozoobenthos menemukan bahwa di perairan Sumur didominasi oleh kelas Gastropoda diikuti Bivalva dan Scaphopoda. Kelas Gastropoda terdiri dari 36 spesies, Bivalva 17 spesies dan Scaphopoda 1 spesies. Stasiun yang memiliki kepadatan makrozoobenthos tertinggi adalah Stasiun 2 sebesar 7325 ind/m2 dan terkecil pada Stasiun 1 sebesar 600 ind/m2. Hubungan keberadaan
makrozoobenthos dengan tipe substrat pada lokasi penelitian adalah dari keempat tipe substrat ini hampir semua terdapat organisme makrozoobenthos (Gastropoda, Bivalva dan Scaphopoda) dan kepadatan tertinggi didapatkan pada substrat lumpur berpasir.
KLASIFIKASI HABITAT DASAR PERAIRAN DENGAN
MENGGUNAKAN INSTRUMEN HIDROAKUSTIK
SIMRAD EY 60 DI PERAIRAN SUMUR,
PANDEGLANG – BANTEN
SKRIPSI
Sebagai salah satu syarat untuk memperoleh gelar Sarjana Perikanan Pada Fakultas Perikanan dan Ilmu Kelautan
Institut Pertanian Bogor
Oleh :
Obed Agtapura Taruk Allo C64104032
PROGRAM STUDI ILMU DAN TEKNOLOGI KELAUTAN FAKULTAS PERIKANAN DAN ILMU KELAUTAN
INSTITUT PERTANIAN BOGOR 2008
© Hak cipta milik Obed Agtapura Taruk Allo, tahun 2008
Hak cipta dilindungi
Dilarang mengutip dan memperbanyak tanpa izin tertulis dari Institut Pertanian Bogor, sebagian atau seluruhnya dalam bentuk apapun, baik cetak, fotocopy, microfilm, dan sebagainya
Judul : KLASIFIKASI HABITAT DASAR PERAIRAN DENGAN MENGGUNAKAN INSTRUMEN
HIDROAKUSTIK SIMRAD EY 60 DI PERAIRAN SUMUR, PANDEGLANG – BANTEN
Nama : Obed Agtapura Taruk Allo
NRP : C64104032
Departemen : Ilmu dan Teknologi Kelautan
Menyetujui,
Komisi Pembimbing
Pembimbing I Pembimbing II
Dr. Ir. Sri Pujiyati, M.Si Prof. Dr. Ir. Indra Jaya, M.Sc NIP. 131.999.591 NIP. 131.578.799
Mengetahui,
Dekan Fakultas Perikanan dan Ilmu Kelautan
Prof. Dr. Ir. Indra Jaya, M.Sc NIP. 131.578.799
KATA PENGANTAR
Puji syukur penulis panjatkan ke hadirat Tuhan Yesus Kristus karena kasih dan karunia yang Dia berikan sehingga skripsi ini dapat diselesaikan. Skripsi yang berjudul KLASIFIKASI HABITAT DASAR PERAIRAN DENGAN MENGGUNAKAN INSTRUMEN HIDROAKUSTIK SIMRAD EY 60 DI PERAIRAN SUMUR, PANDEGLANG – BANTEN diajukan sebagai salah satu syarat untuk mendapatkan gelar Sarjana Perikanan pada Fakultas Perikanan dan Ilmu Kelautan.
Dalam kesempatan ini penulis ingin mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Papa, Mama, Juti sekeluarga, Elni sekeluarga, keponakanku (Inri, Hana, Nuel dan Irgi) beserta sanak keluarga yang tak henti-hentinya memberi dukungan, doa dan nasihat kepada penulis. Thanks for all……. God Bless You All….. 2. Dr. Ir. Sri Pujiyati, M.Si dan Prof. Dr. Ir. Indra Jaya, M.Sc selaku komisi
pembimbing yang telah membantu penulis dalam proses penyelesaian tugas akhir.
3. Dr. Ir. Jonson L. Gaol, M.Si selaku Pembimbing Akademik selama penulis menuntut ilmu di Departemen ITK – IPB dan sebagai penguji perwakilan program studi pada ujian akhir penulis yang telah memberi saran dan masukan.
4. Dr. Ir. Henry M. Manik, M.T. selaku penguji tamu atas segala saran dan masukan buat penyelesaian skripsi.
5. Bapak/Ibu dosen dan staf penunjang Departemen ITK atas bantuannya selama penulis menyelesaikan studi di IPB.
6. Dr. Ir. Totok Hestirianoto, M.Sc atas segala bimbingannya dan juga telah memberikan kesempatan kepada penulis untuk mengikuti proyek dalam rangka pengambilan data hidroakustik di lapangan.
7. Ir. Wazir Mawardi, M.Si atas bimbingannya selama di lapangan. 8. Bang Asep (BRPL), Sandi (PRPT) dan Indra (PSP 39) atas bantuan dan
kerjasamanya selama proses pengambilan data hidroakustik.
9. Pak Ruslan atas bimbingan dan bantuan dalam proses mengidentifikasi organisme bentos.
10. Teman-teman seperjuanganku ITK 41 dan all ITKerz yang tidak dapat disebutkan satu persatu. Suka duka telah kita lalui bersama, biarlah itu menjadi kenangan terindah buat kita semua.
11. Teman-teman kos Perwira 10. Thanks buat kebersamaannya. GBU. 12. Teman-teman sekamar C2-121 (Chrisman, Asep dan David) 13. Teman-teman sepelayananku di PMK dan KPA.
14. Adik-adik panti Candra Naya dan Bina Harapan serta SM Kracak. 15. Buat seseorang yang sangat kusayangi dan mungkin akan sangat sulit
kumiliki. Love u……
Penulis menyadari bahwa skripsi ini jauh dari kesempurnaan, oleh karena itu saran dan kritik sangat diharapkan demi kesempurnaan skripsi ini. Akhir kata penulis berharap agar skripsi ini berguna bagi diri sendiri maupun orang lain. Tuhan Memberkati.
Bogor, Juli 2008
DAFTAR ISI
Halaman
DAFTAR TABEL ... xi
DAFTAR GAMBAR ... xii
DAFTAR LAMPIRAN ... xiv
1. PENDAHULUAN ... 1
1.1 Latar belakang ... 1
1.2 Tujuan ... 3
2. TINJAUAN PUSTAKA ... 4
2.1 Metode akustik ... 4
2.2 Echosounder split beam ... 6
2.2.1 Time base ... 6
2.2.2 Transmitter ... 6
2.2.3 Transducer ... 6
2.2.4 Receiver ... 7
2.2.5 Recorder ... 8
2.3 Sedimen dasar laut ... 8
2.4 Klasifikasi dasar perairan (Bottom classification) ... 14
2.5 Makrozoobenthos ... 18
2.6 SIMRAD EY 60 ... 19
2.7 GPS (Global Positioning System) ... 20
2.8 Keadaan umum lokasi penelitian ... 22
3. BAHAN DAN METODE ... 23
3.1 Waktu dan tempat penelitian ... 23
3.2 Perangkat dan peralatan ... 25
3.2.1 Perangkat akustik SIMRAD EY 60 scientific echosounder system ... 25
3.2.2 Kapal ... 25
3.2.3 Alat pengambilan pontoh sedimen dan benthos ... 26
3.3 Pengambilan data akustik ... 26
3.4 Pengambilan contoh sedimen ... 27
3.5 Pengambilan contoh makrozoobenthos ... 28
3.6 Analisis data ... 28
3.6.1 Analisis data akustik ... 28
3.6.2 Analisis sedimen ... 31
3.6.3 Analisis populasi dan komunitas ... 32
4. HASIL DAN PEMBAHASAN ... 35
4.1 Profil batimetri perairan Sumur ... 35
4.2 Sedimen dasar laut ... 36
4.2.1 Pasir ... 37
4.2.2 Lumpur ... 39
4.2.3 Liat ... 41
4.3 Backscatter dasar perairan ... 43
4.4 Karateristik biologi komunitas makrozoobenthos ... 47
4.4.1 Komposisi organisme ... 47
4.4.2 Kepadatan makrozoobenthos ... 51
4.4.3. Indeks Keanekaragaman (H’), Keseragaman (E) dan Dominansi (D) ... 53
4.5 Analisis Komponen Utama (Principal Component Analysis) ... 55
4.6 Hubungan jenis makrozoobenthos terhadap tipe substrat ... 59
5. KESIMPULAN DAN SARAN ... 62
5.1 Kesimpulan ... 62
5.2 Saran ... 63
DAFTAR PUSTAKA ... 64
LAMPIRAN ... 67
DAFTAR TABEL
Halaman
1. Klasifikasi sedimen berdasarkan ukuran ... 9
2. Klasifikasi sedimen laut ... 13
3. Beberapa jenis-jenis hewan utama yang terdapat di dasar lautan ... 20
4. Spesifikasi SIMRAD EY 60 scientific echosounder system ... 25
5. Alat pemrosesan data ... 26
6. Selang nilai E1 dan E2 ... 44
7. Kepadatan makrozoobenthos tiap stasiun selama pengamatan ... 51
8. Indeks Keanekaragaman (H’), Keseragaman (E) dan Dominansi (D) pada stasiun pengamatan ... 54
9. Hubungan keberadaan kelompok makrozoobenthos dengan tipe substrat ... 59
DAFTAR GAMBAR
Halaman
1. Diagram Sand, Silt and Clay ... 12
2. Geometri echo dasar perairan secara akustik ... 16
3. Klasifikasi berbagai jenis substrat dasar berdasarkan nilai E1 dan E2 ... 18
4. Lokasi penelitian ... 24
5. Diagram alir pengambilan data ... 27
6. Diagram alir analisis data ... 29
7. Batimetri daerah penelitian ... 35
8. Persentase substrat di lokasi penelitian ... 37
9. Persentase pasir ... 38
10. Distribusi persentase fraksi pasir ... 39
11. Persentase lumpur ... 40
12. Distribusi persentase fraksi lumpur ... 41
13. Persentase liat ... 42
14. Distribusi persentase fraksi liat ... 43
15. Penyebaran nilai backscatter E1 di perairan Sumur ... 46
16. Penyebaran nilai backscatter E2 di perairan Sumur ... 46
17. Klasifikasi substrat perairan Sumur ... 48
18. Komposisi makrozoobenthos dari seluruh stasiun pengamatan ... 49
19. Komposisi makrozoobenthos pada tiap stasiun pengamatan ... 51
20. Kepadatan makrozoobenthos pada tiap stasiun pengamatan ... 53
21. PCA untuk parameter fisika sedimen, backscattering volume dasar perairan (E1 dan E2), indeks biologi dan kepadatan makrozoobenthos pada
sumbu F1 × F2 ... 58 22. Penyebaran stasiun pada sumbu F1 dan F2 ... 58
DAFTAR LAMPIRAN
Halaman
1. SIMRAD EY 60 (Laptop, GPS dan transducer) ... 68
2. Global Positioning System (GPS) ... 68
3. Posisi penempatan transducer pada kapal dan setting alat ... 69
4. Van veen grab ... 69
5. Tampilan Echoview 3,5 ... 70
6. Proses integrate cell pada Echoview 3,5 ... 70
7. Shieve shaker (ASTM E – 11. USA Standard) ... 71
8. Data hasil integrasi echogram pada Echoview 3,5 ... 72
9. Data makrozoobenthos ... 81
10. Contoh makrozoobenthos ... 82
11. Hasil olahan fraksi sedimen di Balai Balai Penelitian Tanah Laboratorium Fisika Tanah Bogor ... 84
DAFTAR ISTILAH
Akustik (Acoustics) : Ilmu tentang suara, sifat dan karakteristiknya di dalam suatu medium.
Backscattering : Jumlah energi per satuan waktu yang dihambur- (hambur balik) kan oleh target selama transmisi suara dari transducer.
Echogram : Rekaman dari rangkaian gema.
Echo/Gema : Gelombang suara yang dipantulkan oleh target. Echosounder : Perangkat akustik yang digunakan untuk menampilkan data echogram dari transducer. EDSU : Elementary Distance Sampling Unit.
E1 : Nilai hambur balik pertama dari dasar perairan (Energy of the 1st bottom echo).
E2 : Nilai hambur balik kedua dari dasar perairan (Energy of the 2nd bottom echo).
Hidroakustik : Ilmu yang mempelajari tentang, sifat, karakteristik dan perambatan gelombang suara dalam medium air.
Ping : Sebutan untuk setiap pulsa yang dipancarkan oleh transducer.
Threshold : Ambang nilai yang berfungsi untuk
membatasi/menapis pantulan yang ditampilkan pada echogram.
Transducer : Perangkat akustik yang digunakan sebagai transmitter (pemancar) dan receiver (penerima) gelombang suara.
1. PENDAHULUAN
1.1.Latar belakang
Peneliti-peneliti dalam bidang perikanan dan kelautan di dunia terlebih khusus di Indonesia tentunya selalu berupaya untuk menemukan segala sesuatu yang belum diketahui oleh banyak orang mengenai segala sumber daya yang terdapat di lautan. Hingga saat ini banyak penelitian yang berkembang pesat seiring dengan ditemukannya peralatan-peralatan modern yang semakin mempermudah dalam mengeksplorasi segala bentuk sumber daya alam yang terdapat di lautan. Selain peralatan-peralatan modern, pengetahuan tentang laut itu sendiri tentunya akan sangat diperlukan untuk menunjang segala bentuk aspek penelitian.
Salah satu cara untuk mengetahui bagaimana karateristik dari lautan itu sendiri adalah dengan mempelajari bentuk / karateristik dari dasar perairan yang antara lain berupa tipe substrat atau sedimen beserta organisme yang hidupnya di dasar perairan. Perkembangan penelitian mengenai dasar perairan telah banyak dilakukan dimana para peneliti berusaha untuk mencari hubungan antar parameter di dasar perairan (organisme bentos, vegetasi perairan dan ikan demersal) berupa hubungan korelasi antara tipe substrat dengan organismenya.
Pengetahuan mengenai dasar laut mulai berkembang setelah ditemukannya alat echosounder. Kegunaan utama dari alat ini adalah untuk pengukuran
kedalaman laut, pada Perang Dunia I dikembangkan untuk mendeteksi kapal-kapal selam. Alat yang bekerja berdasarkan ketepatan perbedaan waktu pada saat transmisi pulsa dan perjalanan echo dari dasar perairan. Kedalaman perairan di bawah kapal dapat dihitung dari kecepatan suara di air laut. Echosounder pertama
kali digunakan pada saat eksplorasi Meteor (1927 – 1929) di Jerman pada saat pemetaan wilayah Atlantik selatan. Pemetaan secara sistematis pada deep-ocean basin dimulai pada akhir tahun 1940-an. Jadi wilayah yang luas dapat diselidiki secara cepat dan mudah (Gross, 1993).
Pentingnya mengetahui tipe substrat dasar dari suatu perairan adalah untuk mengetahui pola sebaran dari berbagai jenis tipe substrat berdasarkan ukuran dan asal dari substrat tersebut pada suatu perairan. Biota dasar atau lebih sering dikenal dengan sebagai bentos terdiri dari berbagai jenis dan tipe organisme yang hidup di dasar perairan, baik yang hidup tertancap (lamun, spongae); merayap (bintang laut, kepiting); maupun yang membenamkan diri di pasir maupun lumpur (kerang-kerangan, cacing). Di laut, bentos mempunyai kekayaan jenis ± 157.000 spesies, lebih besar dibanding kekayaan jenis populasi fauna pelagis, yaitu ± 3.000 spesies (Setyobudiandi, 1999). Pengklasifikasian ini tentunya bermanfaat untuk mengetahui pada tipe substrat yang mana terdapat kelimpahan bentos dan vegetasi yang paling dominan yang nantinya dari kelimpahan bentos dan vegetasi ini dapat diduga kelimpahan biomassa ikannya, hal ini dikarenakan pada daerah yang memiliki kelimpahan organisme bentos yang tinggi tentunya dapat menjadi tempat bagi sekumpulan ikan untuk mencari makan.
Substrat dasar perairan dapat diklasifikasikan berdasarkan ukuran partikel, sumber, lokasi dan warna dari sedimen tersebut. Pada penelitian ini dilakukan pengamatan karateristik dasar perairan dengan menggunakan echosounder dimana gelombang suara berupa pulsa ditembakkan ke dasar perairan dengan panjang frekuensi tertentu yang nantinya akan diterima kembali oleh alat penerima
hidup pada dasar perairan dalam hal ini organisme makrozoobenthos untuk mengetahui komposisi organisme yang ada pada sedimen.
1.2.Tujuan
Tujuan dari penelitian ini adalah mengklasifikasikan habitat dasar perairan dengan menggunakan instrumen hidroakustik SIMRAD EY 60 berdasarkan nilai backscattering volume dasar perairan dari berbagai tipe substrat beserta komposisi organisme makrozoobenthos yang ada pada sedimen.
2. TINJAUAN PUSTAKA
2.1. Metode akustik
Akustik merupakan ilmu yang mempelajari gelombang suara dan perambatannya dalam suatu medium, dalam hal ini mediumnya adalah air laut. Instrumen yang digunakan dalam metode akustik adalah sistem SONAR (Sound Navigation and Ranging) yakni suatu instrumen yang digunakan untuk
memperoleh informasi tentang objek-objek bawah air dengan memancarkan gelombang suara dan mengamati / menganalisis echo yang diterima.
Prinsip dari pengoperasian m etode akustik adalah dimulai dari timer yang berfungsi sebagai penanda pulsa listrik untuk mengaktifkan pemancaran pulsa yang akan dipancarkan oleh transmitter melalui transducer. Selanjutnya, transducer mengubah energi listrik menjadi energi suara ketika suara akan dipancarkan ke medium. Gelombang akustik yang merambat di kolom perairan akan mengenai target seperti ikan atau dasar perairan dimana gelombang akustik ini akan dipantulkan kembali dalam bentuk echo dan akan diterima oleh
transducer dan mengubahnya menjadi energi listrik dan diteruskan ke receiver amplifier. Dalam receiver amplifier ini, sinyal listrik lemah yang dihasilkan oleh transducer setelah echo diterima harus diperkuat beberapa ribu kali sebelum diteruskan ke unit peraga untuk ditampilkan dalam bentuk echogram (MacLennan dan Simmonds, 2005).
FAO (1985) menerangkan beberapa keunggulan komparatif metode akustik sebagai berikut :
1. Digunakan untuk mencari daerah fishing grounds. 2. Dapat digunakan untuk melihat kedalaman perairan.
3. Memungkinkan memperoleh dan memproses data secara real time. 4. Dapat melihat tipe substrat dan rongsokan kapal.
5. Akurasi dan ketepatan (accuracy and precision).
6. Tidak berbahaya / merusak karena frekuensi suara yang digunakan tidak akan membahayakan baik si pemakai alat, maupun target / objek survei dan dilakukan dengan jarak jauh (remote sensing).
7. Dapat digunakan jika metode lain tidak mungkin dilakukan.
Gangguan yang biasa terjadi dalam menjalankan metode akustik disebut noise. Noise merupakan sinyal yang tidak diinginkan yang dapat terjadi karena beberapa faktor seperti :
1. Faktor fisik – angin, pecahan ombak, turbulensi.
2. Faktor biologi – suara dan pergerakan binatang di bawah air.
3. Faktor artificial – deruman mesin kapal, baling-baling kapal, dan aliran air disekitar badan kapal.
Seiring dengan perkembangan ilmu akustik dan instrumen-instrumen akustik di negara-negara maju, pemanfaatan metode akustik di Indonesia berkembang ke arah yang lebih maju antara lain : untuk pendugaan stok
sumberdaya hayati, operasi penangkapan ikan, navigasi, untuk mempelajari proses sedimentasi, penentuan kontur dasar laut atau batimetri, penentuan jenis dan komposisi sedimen dasar laut (lumpur, pasir, kerikil, kerang dan sebagainya) dan penentuan sifat-sifat akustik dari air laut dan objek bawah air.
2.2. Echosounder split beam 2.2.1. Time base
Time base berfungsi sebagai penanda pulsa listrik untuk mengaktifkan pemancaran pulsa yang akan dipancarkan oleh transmitter melalui transducer. Suatu perintah dari time base akan memberikan saat kapan pembentuk pulsa bekerja pada unit transmitter dan receiver.
2.2.2. Transmitter
Transmitter berfungsi menghasilkan pulsa yang akan dipancarkan. Suatu perintah dari kotak pemicu pulsa pada recorder akan memberitahukan kapan pembentuk pulsa bekerja. Pulsa dibangkitkan oleh oscillator kemudian diperkuat oleh power amplifier, sebelum pulsa tersebut disalurkan ke transducer (FAO, 1983).
2.2.3. Transducer
Fungsi utama dari transducer adalah mengubah energi listrik menjadi energi suara ketika suara akan dipancarkan ke medium dan mengubah energi suara menjadi energi listrik ketika echo diterima dari suatu target. Selain itu fungsi lain dari transducer adalah memusatkan energi suara yang akan dipantulkan sebagai beam.
Pulsa ditransmisikan secara bersamaan oleh keempat kuadran tetapi sinyal diterima oleh masing-masing kuadran dan diproses secara terpisah. Keempat kuadran diberi label a – d. Sudut θ pada satu bidang dibedakan oleh perbedaan fase (a – b) dan (c – d), jumlah sinyal (a + c) dibandingkan dengan jumlah sinyal (b + d). Sudut φ di dalam bidang tegak lurus terhadap yang pertama adalah sama
dibedakan oleh perbedaan fase antara (a + b) dan (c + d). Kedua sudut tersebut mendefinisikan arah target yang spesifik (MacLennan dan Simmonds, 2005).
Kesulitan yang dihadapi untuk mengeliminir faktor beam pattern dapat diatasi dengan menggunakan split beam method. Metode ini menggunakan receiving transducer yang dibagi menjadi 4 kuadran. Pemancaran gelombang suara dilakukan dengan full beam yang merupakan penggabungan dari keempat kuadran dalam pemancaran secara simultan. Selanjutnya, sinyal yang memancar kembali dari target diterima oleh masing-masing kuadran secara terpisah, output dari masing-masing kuadran kemudian digabungkan lagi untuk membentuk suatu full beam dengan 2 set split beam. Target tunggal diisolasi dengan menggunakan output dari full beam sedangkan posisi sudut target dihitung dari kedua set split beam.
Transducer dengan sistem akustik split beam ini pada prinsipnya terdiri dari empat kuadran yaitu Fore, Aft, Port dan Starboard transducer. Transducer split beam memiliki beam yang sangat tajam (100) dan mempunyai kemampuan menentukan posisi target dalam bentuk beam suara dengan baik yaitu dengan mengukur beda fase dari sinyal echo yang diterima oleh kedua belah transducer (Simrad, 1993).
2.2.4. Receiver
Receiver berfungsi menerima pulsa dari objek dan display atau recorder sebagai pencatat hasil echo. Sinyal listrik lemah yang dihasilkan oleh transducer setelah echo diterima harus diperkuat beberapa ribu kali sebelum disalurkan ke recorder. Selama penerimaan berlangsung keempat bagian transducer menerima echo dari target, dimana target yang terdeteksi oleh transducer terletak dari pusat
beam suara dan echo dari target akan dikembalikan dan diterima oleh keempat bagian transducer pada waktu yang bersamaan
Split beam echosounder modern memiliki fungsi Time Varied Gain (TVG) di dalam sistem perolehan data akustik. TVG berfungsi secara otomatis untuk mengeliminir pengaruh attenuasi yang disebabkan oleh geometrical sphreading dan absorpsi suara ketika merambat di dalam air.
2.2.5. Recorder
Recorder berfungsi untuk merekam atau menampilkan sinyal echo dan juga berperan sebagai pengatur kerja transmitter dan mengukur waktu antara pemancaran pulsa suara dan penerimaan echo atau recorder memberikan sinyal kepada transmitter untuk menghasilkan pulsa dan pada saat yang sama recorder juga mengirimkan sinyal ke receiver untuk menurunkan sensitifitasnya (FAO, 1983).
2.3. Sedimen dasar laut
Sedimen adalah kerak bumi (regolith) yang ditransportasikan melalui proses hidrologi dari suatu tempat ke tempat yang lain, baik secara vertikal maupun secara horizontal. Seluruh permukaan dasar lautan ditutupi oleh partikel-partikel sedimen yang diendapkan secara perlahan-lahan dalam jangka waktu berjuta-juta tahun (Garrison, 2005).
Sedimen terutama terdiri dari partikel-partikel yang berasal dari hasil pembongkaran batu-batuan dan potongan-potongan kulit (shell) serta sisa rangka-rangka dari organisme laut. Ukuran-ukuran partikel sedimen sangat ditentukan
oleh sifat-sifat fisik mereka dan akibatnya sedimen yang terdapat di berbagai tempat di dunia mempunyai sifat-sifat yang sangat berbeda satu sama lainnya.
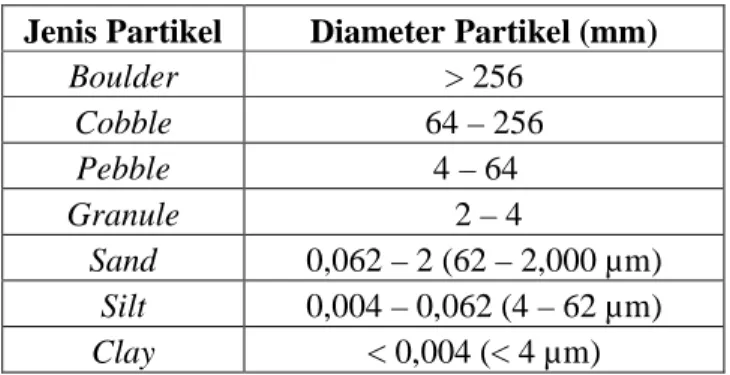
Ukuran-ukuran partikel sedimen merupakan salah satu cara yang mudah untuk menetukan klasifikasi sedimen. Klasifikasi berdasarkan ukuran partikelnya menurut Wentworth (1922) dalam Dale dan William (1989) dapat dilihat pada Tabel 1.
Tabel 1. Klasifikasi sedimen berdasarkan ukuran
Jenis Partikel Diameter Partikel (mm)
Boulder > 256 Cobble 64 – 256 Pebble 4 – 64 Granule 2 – 4 Sand 0,062 – 2 (62 – 2,000 µm) Silt 0,004 – 0,062 (4 – 62 µm) Clay < 0,004 (< 4 µm) Sumber : Dale dan William (1989)
Chester (1993) membagi sedimen menjadi 2 kelompok yaitu:
1. Nearshore sediment, sebagian besar endapan sedimen berada di dasar laut yang dipengaruhi kuat oleh kedekatannya dengan daratan sehingga mengakibatkan kondisi fisika kimia dan biologi di sedimen ini lebih bervariasi dibandingkan dengan deep-sea sediment.
2. Deep-sea sediment, sebagian besar mengendap di perairan dalam di atas 500 m dan banyak faktor seperti jauhnya dari daratan, reaksi antara komponen terlarut dalam kolom perairan serta hadirnya biomassa khusus yang mendominasi lingkungan laut dalam yang menyebabkan sedimen ini merupakan habitat yang unik di planet dan memiliki karateristik yang sangat berbeda dengan daerah continental / near shore.
Menurut asalnya Garrison (2006) menggolongkan sedimen ke dalam 4 bagian yaitu:
1. Sedimen Terrigenous
Jenis sedimen ini berasal dari erosi yang berasal dari benua atau pulau, letusan gunung berapi dan segumpalan debu. Sedimen ini lebih dikenal dengan batuan yang berasal dari gunung berapi seperti granit yang bersumber dari tanah liat dan batuan kwarsa yang menjadi dua komponen penyusun sedimen terrigenous.
2. Sedimen Lithogenous
Sedimen ini berasal dari sisa pengikisan batu-batuan di darat. Ini
diakibatkan karena adanya suatu kondisi fisik yang ekstrim, seperti adanya pemanasan dan pendinginan terhadap batu-batuan yang terjadi secara terus-menerus. Partikel-partikel ini diangkut dari daratan ke laut oleh sungai-sungai. Begitu sedimen mencapai lautan, partikel-partikel yang berukuran besar cenderung untuk lebih cepat tenggelam dan menetap dari yang berukuran lebih kecil. Kecepatan tenggelamnya partikel-partikel ini telah dihitung, dimana jenis partikel pasir hanya memerlukan waktu kira-kira 1,8 hari untuk tenggelam dan menetap di atas lapisan atas dasar laut yang mempunyai kedalaman 4.000 meter. Sedangkan jenis partikel lumpur yang berukuran lebih kecil membutuhkan waktu kira-kira 185 hari dan jenis partikel tanah liat membutuhkan waktu kira-kira 51 tahun pada kedalaman kolom air yang sama. Oleh karena itu tidaklah mengherankan jikalau pasir akan segera diendapkan begitu sampai di laut dan cenderung untuk mengumpul di daerah pantai (Hutabarat dan Stewart, 2000).
3. Sedimen Biogenous
Sedimen ini berasal dari sisa-sisa rangka dari organisme hidup. Jenis sedimen ini digolongkan ke dalam dua tipe utama yaitu calcareous dan siliceous ooze. Material siliceous dan calcareous pada waktu itu di ekstrak dari laut dengan aktivitas normal dari tanaman dan hewan untuk membangun rangka dan cangkang. Kebanyakan organisme yang menghasilkan sedimen biogenous mengapung bebas di perairan seperti plankton. Sedimen biogenous paling berlimpah dimana cukup nutrien yang mendorong produktivitas biologi yang tinggi, selalu terjadi pada wilayah dekat continental margin dan area upwelling.
Thurman dan Trujillo (2004) menyatakan bahwa dua campuran kimiawi yang paling umum terdapat dalam sedimen biogenous adalah calcium carbonat (CaCO3, dimana tersusun dari mineral calcite) dan silica (SiO2).
Seringkali silica secara kimiawi dikombinasikan dengan air untuk menghasikan SiO2 . nH2O.
4. Sedimen Hydrogenous
Sedimen hydrogenous terdiri dari mineral yang mempercepat proses presipitasi dari laut. Jenis partikel ini dibentuk sebagai hasil reaksi kimia dalam air laut. Reaksi kimia yang terjadi disini bersifat sangat lambat, dimana untuk membentuk sebuah nodule yang besar diperlukan waktu selama berjuta-juta tahun dan proses ini kemudian akan berhenti sama sekali jika nodule telah terkubur di dalam sedimen. Di pusat perputaran, jauh dari benua, partikel sedimen terakumulasi sangat lambat.
5. Sedimen Cosmogenous
Sedimen ini bersumber dari wilayah e sedimen yang paling sedikit kelimpahannya cosmogenous terdiri dari dua jen
peninggalan meteo
debu masuk ke samudera dan kebanyakan diperoleh dari meteor yang terbakar habis di
Klasifikasi sedimen
Silt and Clay seperti pada Gambar 1
Gambar 1. Diagram Cosmogenous
Sedimen ini bersumber dari wilayah ekstraterrestrial dan merupakan yang paling sedikit kelimpahannya di lautan. Sedimen
terdiri dari dua jenis utama: microscopis spherules peninggalan meteor makroskopik. Diperkirakan 30.000 ton per tahun debu masuk ke samudera dan kebanyakan diperoleh dari meteor yang
di atmosfer.
sedimen dapat dilakukan dengan menggunakan diagram seperti pada Gambar 1.
Gambar 1. Diagram Sand, Silt and Clay (Blott dan Kenneth, 2001) merupakan Sedimen microscopis spherules dan
000 ton per tahun debu masuk ke samudera dan kebanyakan diperoleh dari meteor yang
diagram Sand,
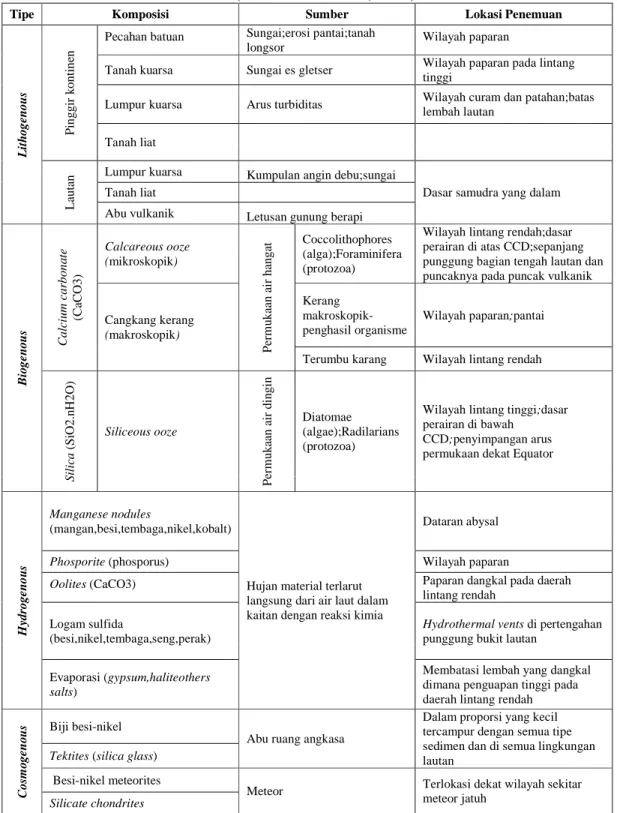
Tabel 2 berikut mengklasifikasikan sedimen laut berdasarkan komposisi, sumber dan lokasi ditemukannya di laut.
Tabel 2. Klasifikasi sedimen laut (Thurman dan Alan, 2004)
Tipe Komposisi Sumber Lokasi Penemuan
L it h o g en o u s P in g g ir k o n ti n en
Pecahan batuan Sungai;erosi pantai;tanah
longsor Wilayah paparan
Tanah kuarsa Sungai es gletser Wilayah paparan pada lintang
tinggi
Lumpur kuarsa Arus turbiditas Wilayah curam dan patahan;batas
lembah lautan Tanah liat L au ta
n Lumpur kuarsa Kumpulan angin debu;sungai
Dasar samudra yang dalam
Tanah liat
Abu vulkanik Letusan gunung berapi
B io g e n o u s C a lc iu m c a rb o n a te (C aC O 3 ) Calcareous ooze (mikroskopik) P er m u k aa n a ir h an g at Coccolithophores (alga);Foraminifera (protozoa)
Wilayah lintang rendah;dasar perairan di atas CCD;sepanjang punggung bagian tengah lautan dan puncaknya pada puncak vulkanik
Cangkang kerang (makroskopik) Kerang makroskopik-penghasil organisme Wilayah paparan;pantai
Terumbu karang Wilayah lintang rendah
S il ic a ( S iO 2 .n H 2 O ) Siliceous ooze P er m u k aa n a ir d in g in Diatomae (algae);Radilarians (protozoa)
Wilayah lintang tinggi;dasar perairan di bawah
CCD;penyimpangan arus permukaan dekat Equator
H yd ro g e n o u s Manganese nodules (mangan,besi,tembaga,nikel,kobalt)
Hujan material terlarut langsung dari air laut dalam kaitan dengan reaksi kimia
Dataran abysal
Phosporite (phosporus) Wilayah paparan
Oolites (CaCO3) Paparan dangkal pada daerah
lintang rendah Logam sulfida
(besi,nikel,tembaga,seng,perak)
Hydrothermal vents di pertengahan punggung bukit lautan
Evaporasi (gypsum,haliteothers salts)
Membatasi lembah yang dangkal dimana penguapan tinggi pada daerah lintang rendah
C o sm o g e n o u s Biji besi-nikel
Abu ruang angkasa
Dalam proporsi yang kecil tercampur dengan semua tipe sedimen dan di semua lingkungan lautan
Tektites (silica glass) Besi-nikel meteorites
Meteor Terlokasi dekat wilayah sekitar
meteor jatuh Silicate chondrites
Karateristik sedimen dapat menentukan morfologi fungsional dan tingkah laku hewan bentos. Tipe substrat dapat memberikan kendali terhadap distribusi organisme bentos di perairan. Adaptasi terhadap tipe substrat akan menentukan morfologi, cara makan dan adaptasi fisiologi organisme terhadap suhu, salinitas dan faktor kimia lainnya (Hutabarat dan Stewart, 2000). Levinton (1982) mengatakan bahwa ukuran partikel sedimen juga berperan penting dalam menentukan jenis bentos laut.
2.4. Klasifikasi dasar perairan (Bottom classification)
Informasi mengenai tipe dasar, sedimen dan vegetasi perairan secara umum dapat digambarkan pada sinyal echo dimana sinyal ini dapat disimpan dan diperoleh secara bersamaan dengan menggunakan data GPS. Sinyal echo ini dapat diuraikan sehingga informasi mengenai dasar perairan dapat diproyeksikan ke suatu tabel digital. Untuk verifikasi hasil, sampel fisik dasar perairan harus diobservasi melalui penyelaman atau dengan menggunakan kamera bawah air (underwater camera) yang harus direkam sebagai salah satu data akustik yang diperoleh sehingga pada saat verifikasi kembali data yang ada dapat digunakan untuk membandingkan tipe dasar perairan yang belum diketahui (Burczynski, 2002).
Nilai dari sinyal echo selain tergantung dari tipe dasar perairan (khususnya kekasaran dan kekerasan) tetapi tergantung juga dari parameter alat (misalnya frekuensi dan transducer beamwidth) (Burczynski, 2002). Oleh karena itu, verifikasi hasil akan sah hanya untuk sistem akustik yang telah digunakan untuk verifikasi.
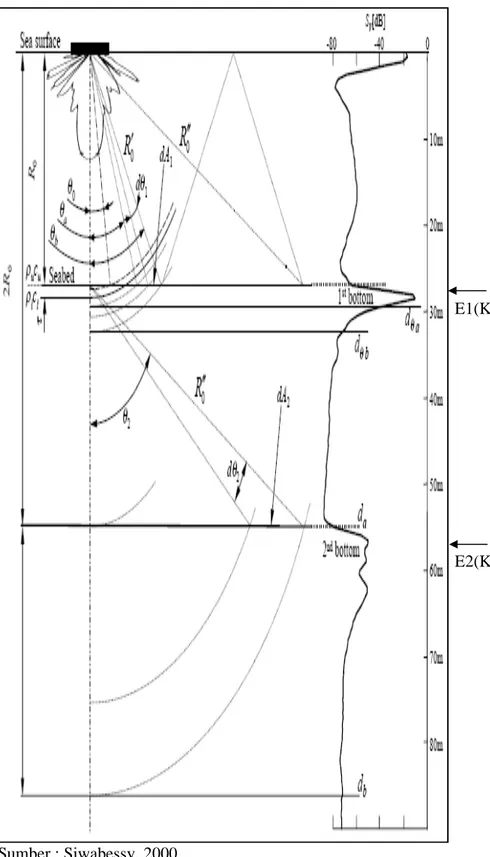
Penggolongan dasar perairan tentunya akan selalu berkaitan dengan bagaimana cara menentukan fraksi sedimen dari dasar perairan. Perbandingan nilai E1 dan E2 dalam metode akustik tentunya akan memberikan gambaran yang jelas dari dasar perairan seperti digambarkan pada Gambar 2.
Kloser et al. (2001) dan Schlagintweit (1993) mengamati klasifikasi dasar laut dari frekuensi akustik. Dasar perairan yang memiliki ciri-ciri yang sama, perbedaan indeks kekasaran diamati berdasarkan perbedaan dua frekuensi yang mereka gunakan. Selanjutnya, Schlagintweit (1993) menemukan bahwa
perbedaan timbul dari frekuensi 40 dan 208 kHz yang disebabkan oleh perbedaan penetrasi dasar laut berdasarkan frekuensi kedalaman pada berbagai tipe dasar perairan.
Pada frekuensi rendah dimana panjang gelombang akustik lebih besar dari skala kekasaran dasar laut, dasar laut secara akustik akan tampak lembut. Dalam hal ini, pemantulan dasar laut akan didominasi oleh penyebaran dasar laut. Di sisi lain, pada frekuensi tinggi dimana panjang gelombang akustik lebih kecil dari skala penyebaran kekasaran dasar laut, penyebaran kekasaran dapat mendominasi sinyal yang dikembalikan dan dasar laut mungkin secara akustik dianggap kasar. Sebagai tambahan, ketika dasar laut menyerap lebih sedikit energi pada frekuensi rendah dibanding frekuensi tinggi, lapisan dibawah dasar laut permukaan boleh jadi tampak secara akustik . Oleh karena itu, backscatter dasar laut dan
pemantulan dasar perairan pada frekuensi rendah dapat sampai pada waktu yang bersamaan dari berbagai sudut (Penrose et al., 2005).
E1(Kekasaran)
E2(Kekerasan)
Sumber : Siwabessy, 2000
Klasifikasi habitat dasar perairan meliputi penggolongan dari semua organisme yang hidup pada dasar perairan dimana memiliki hubungan yang erat dengan karateristik dari sedimen. Tentunya habitat yang hidup pada dasar perairan akan memilih daerah yang sesuai dengan karateristiknya.
Parameter echo dasar perairan bervariasi secara luas dari ping ke ping. Oleh karena variabilitas ini, perlu dilakukan penyaringan data dan mengambil suatu nilai rata-rata parameter echo dasar perairan di atas sejumlah ping. Penganalisaan data digunakan dengan menggunakan perangkat lunak Echoview 3,5 dimana perangkat lunak ini akan menghasilkan dua variabel yang
menggambarkan karateristik dari sinyal dasar perairan yaitu (Ostrand et al., 2005):
1. Energy of the 1st bottom echo (E1) 2. Energy of the 2nd bottom echo (E2)
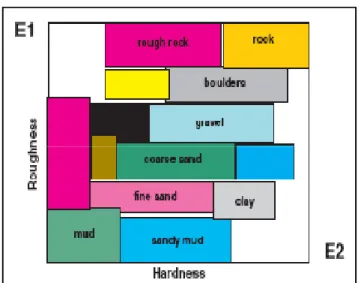
Ostrand et al., (2005) menerangkan hubungan antara E1 (Roughness) dan E2 (Hardness) dapat memperlihatkan jenis / tipe sedimen yang terdapat di suatu perairan dimana semakin besar kedua nilai tersebut maka jenis sedimen pada suatu perairan sebagian besar berupa substrat keras dan sebagian besar memiliki kenampakan megaskopis (Gambar 3).
Sumber : www.BioSonics.com
Gambar 3. Klasifikasi berbagai jenis substrat dasar berdasarkan nilai E1 dan E2
2.5. Makrozoobenthos
Bentos adalah organisme yang hidup di atas atau di dalam dasar perairan dan terdiri dari organisme nabati (fitobenthos) dan organisme hewani
(zoobenthos) (Odum (1971)). Secara umum bentos dikelompokkan dalam tiga bagian besar berdasarkan ukurannya yaitu makrobenthos dimana ukurannya lebih dari 1.0 mm, meiobenthos berukuran antara 0,10 mm – 1.00 mm dan
mikrobenthos yang berukuran lebih kecil dari 0,10 mm.
Awal pekerjaan di alam organisme yang hidup di dasar perairan dikenali berdasarkan komunitas dan karateristik asosiasi spesies makrofauna. Thorson (1957) dalam Barnes (1988) mengelompokkan komunitas dalam tujuh mayor tipe. Dominasi komunitas Macoma berada hingga kedalaman 60 m, komunitas Tellina pada perairan dangkal yang berpasir, komunitas Venus di kedalaman lebih dalam dimana masih terdapat substrat pasir sekitar 7 – 40 m, komunitas Abra terdapat pada daerah berlumpur seperti estuari, komunitas Amphiura ditandai dengan karateristiknya yang hidup pada sedimen yang halus pada kedalaman 15 – 150 m,
komunitas Maldane / Ophiura terdapat pada lumpur yang halus pada wilayah continental shelf pada kedalaman 300 m, dan dominasi komunitas grup amphipod ditemukan pada daerah berlumpur dan perairan keruh.
Jenis hewan yang paling banyak ditemukan pada bentos sebagian besar berupa hewan invertebrata (Tabel 3). Jenis hewan ini mempunyai kisaran ukuran yang sangat luas yaitu dari berukuran sebesar protozoa sampai kepada yang berukuran sebesar crustacea dan moluska. Ukuran ini kadang-kadang dipakai sebagai salah satu dasar untuk mengklasifikasikan mereka.
2.6. SIMRAD EY 60
Split beam SIMRAD EY 60 scientific echo sounder system merupakan instrumen hidroakustik yang paling baru dan merupakan generasi keenam yang dibuat oleh Simrad. SIMRAD EY 60 disebut sebagai alat hidroakustik pertama yang serba bisa, yang mampu menyediakan sounder tiga frekuensi, target strength analyzer dan echo integrator lanjutan. Sinyal echo diproses secara on-line dan hasilnya ditampilkan dengan echogram.
SIMRAD EY 60 disebut sebagai scientific echo sounder karena konsep baru yang digunakan pada receiver memungkinkan alat ini mencapai rentang dinamis sampai dengan 160 dB. Sounder dapat beroperasi pada tiga frekuensi sebesar 12, 38 dan 120 kHz. Keunikan lain dari alat ini adalah kemampuannya untuk mengamati posisi horizontal dari ikan yang berada pada beam, hal ini memungkinkan peneliti untuk mempelajari tingkah laku ikan (www.simrad.com).
Tabel 3. Beberapa jenis-jenis hewan utama yang terdapat di dasar lautan.
Phylum Subgrup dan nama umum
Cnidaria Hydrooa (hydroid coelenterates) Anthozoa (anemones, corals) Plathyhelminthes Turbellaria (flatworms) Aschelminthes Nematoda (roundworms)
Annelida Polychaeta (bristle worms, lugworms) Mollusca Gastropoda (snails and sea-slugs)
Lamellibranchiata (bivalves)
Chephalophoda (cuttlefish and squids) Anthropoda Crustacea (especially ostracods, copepods,
cirripedes, malacostracans) Echinodermata Crinoidea (sea-lilies)
Holothuroidea (sea-cucumbers) Echinoidea (sea-urchins) Asteroidea (starfish) Ophiuroidea (brittle stars) Hemichordata Enteropneusta (acorn-worms) Chordata Urochordata (sea-squirts)
Chephalochordata (Amphioxus) Sumber : Hutabarat dan Stewart, 2000
2.7. Global Positioning System (GPS)
Global Positioning System (GPS) merupakan sistem radio navigasi dalam penentuan posisi dengan menggunakan satelit. Sistem ini didesain untuk
memberikan informasi mengenai waktu di seluruh dunia, memberikan posisi dan kecepatan tiga dimensi yang teliti. Sistem ini juga dapat digunakan di segala cuaca (Abidin, 1997). GPS terdiri dari tiga segmen utama yang terdiri dari: segmen angkasa (space segment) yang terdiri atas satelit-satelit GPS, segmen sistem kontrol (control system segment) yang terdiri atas stasiun-stasiun
pemonitor dan pengontrol satelit dan segmen pemakai (user segment) yang terdiri atas pemakai data GPS.
Antena pada GPS merupakan merupakan alat penerima sinyal GPS yang cukup penting dimana antena ini berfungsi mendeteksi gelombang elektromagne-tik yang datang dari satelit GPS dan mengubahnya menjadi arus listrik. Arus listrik ini kemudian dikuatkan dan dialirkan menuju receiver yang akan diproses lebih lanjut. Antena pada GPS harus mempunyai polarisasi lingkaran yang dapat mengamati sinyal GPS dan mempunyai kepekaan tinggi untuk dapat mendeteksi sinyal yang relatif lemah.
Antena GPS yang digunakan untuk keperluan survei dan pemetaan sebaiknya memiliki stabilitas pusat fase yang tinggi serta daya tolak untuk multipath. Multipath adalah fenomena yang terjadi dimana sinyal dari satelit tiba di antara GPS lewat dua atau lebih lintasan yang berbeda. Ini berarti satu sinyal merupakan sinyal langsung dari satelit ke antena, sedang yang lainnya merupakan sinyal-sinyal tidak langsung yang dipantulkan benda di sekitar antena sebelum tiba di antena (Mbay, 1999).
Sampai saat ini GPS telah banyak digunakan keperluan survei dan pemetaan di laut, survei hidro-oseanografi, survei akustik, penentuan posisi dan peralatan bantu navigasi untuk membantu mempelajari arus, gelombang ataupun pasang surut di lepas pantai. Bahkan GPS dapat dikombinasikan dengan sistem akustik untuk mempelajari dinamika lempeng-lempeng benua di bawah lautan (Abidin,1997).
2.8. Keadaan umum lokasi penelitian
Penelitian ini dilakukan di Kecamatan Sumur, Kabupaten Pandeglang, Propinsi Banten. Daerah ini terletak pada koordinat 6021’ LS – 7010’ LS dan 104048’ BT – 106011’ BT dan lokasinya dekat dengan daerah Ujung Kulon. Bagian Barat Kecamatan Sumur berbatasan langsung dengan Selat Sunda dan bagian selatan berbatasan dengan Samudera Hindia. Kondisi oseanografis di perairan Sumur belum sepenuhnya diketahui sehingga data-data yang berkaitan dengan kondisi perairan Sumur masih sangat kurang.
3. BAHAN DAN METODE
3.1. Waktu dan tempat penelitian
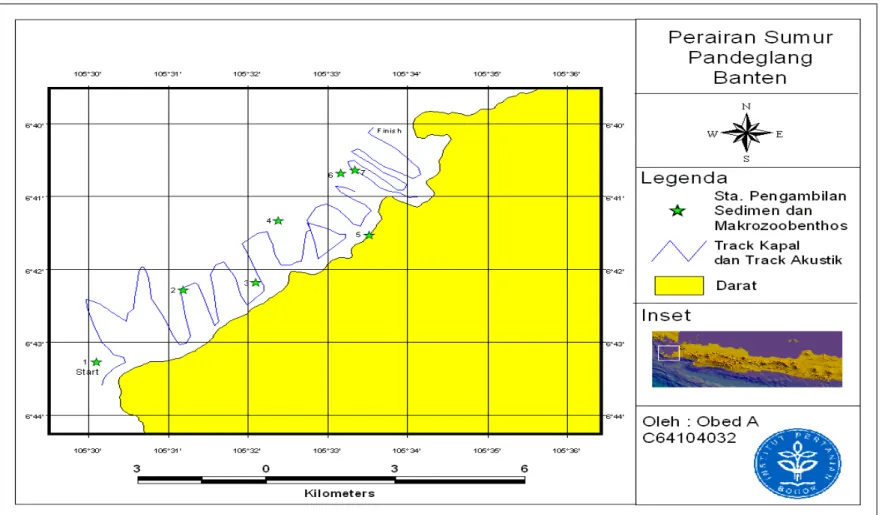
Pengambilan data akustik dilakukan pada tanggal 6 dan 7 September 2007 di perairan daerah Kecamatan Sumur, Kabupaten Pandeglang, Propinsi Banten dengan letak koordinat 6021’ LS – 7010’ LS dan 104048’ BT – 106011’ BT dengan lokasi kedalaman sekitar 3 – 25 m. Penelitian ini dilakukan bersama dengan proyek dalam rangkaian rencana penggunaan Set net di perairan Sumur, dimana penulis terlibat langsung dalam kegiatan pangambilan data ini. Pengolahan dan analisis data mulai dilakukan pada bulan Oktober 2007 dan berakhir hingga bulan Maret 2008. Peta lokasi penelitian dapat dilihat pada Gambar 4.
Gambar 4 juga memperlihatkan desain survei jalur/track yang digunakan pada saat melakukan pengambilan data hidroakustik. Pola track ini telah ditentukan dan disusun di GPS terlebih dulu sebelum turun ke lapangan dimana alur pengambilan data hidroakustik dilakukan. Dari gambar terlihat bahwa pola cruise track yang digunakan adalah pola systematic parallel transect (MacLennan dan Simmonds, 2005). Profil lintasan ini diperoleh dengan menggabungkan semua file echogram hasil deteksi hidroakustik yang dilakukan dan kemudian ditampilkan dengan menggunakan software Echoview 3,5 melalui menu cruise track
3.2. Perangkat dan peralatan
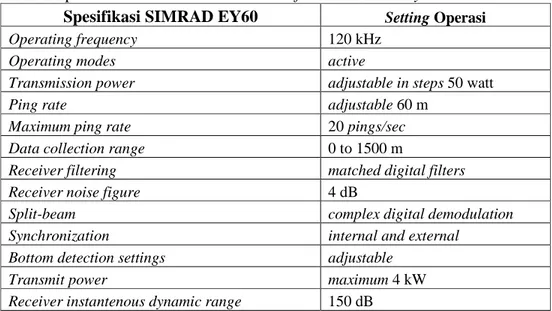
3.2.1. Perangkat akustik SIMRAD EY 60 scientific echosounder system Pengambilan data akustik menggunakan perangkat SIMRAD EY 60 scientific echosounder system (Lampiran 1). Transducer split beam dioperasikan dengan menggunakan frekuensi 120 kHz dengan kecepatan suara sebesar 1542,15 m/dtk dengan nilai transmitted pulse length 0,128 mdtk. Selain itu digunakan laptop untuk merekam data secara real time, dan juga GPS (Global Positioning System) untuk mengetahui posisi lintang (latitude) dan bujur (longitude) (Lampiran 2). Spesifikasi dari SIMRAD EY 60 scientific echo sounder system dapat dilihat pada Tabel 4.
Tabel 4. Spesifikasi SIMRAD EY 60 scientific echosounder system
Spesifikasi SIMRAD EY60 Setting Operasi
Operating frequency 120 kHz
Operating modes active
Transmission power adjustable in steps 50 watt
Ping rate adjustable 60 m
Maximum ping rate 20 pings/sec
Data collection range 0 to 1500 m
Receiver filtering matched digital filters
Receiver noise figure 4 dB
Split-beam complex digital demodulation
Synchronization internal and external
Bottom detection settings adjustable
Transmit power maximum 4 kW
Receiver instantenous dynamic range 150 dB
3.2.2. Kapal
Survei akustik dilakukan dengan menggunakan kapal nelayan setempat (15 GT). Penempatan komponen Simrad EY 60 dan laptop harus berada pada tempat yang aman dan mudah dioperasikan, tempat yang paling baik adalah di
daerah ruang kemudi. Penempatan posisi transducer harus masuk ke dalam air, sehingga diletakkan di sisi luar kapal pada bagian kiri kapal (Lampiran 3). Transducer diletakkan di sebelah kiri karena perputaran baling-baling kapal berlawanan dengan arah jarum jam. Hal ini dilakukan karena noise yang
ditimbulkan oleh baling-baling lebih besar pada satu sisi kapal daripada sisi yang lain. Dalam hal ini sisi kanan kapal memiliki noise yang besar karena baling-baling kapal berputar ke arah kiri.
3.2.3. Alat dan bahan pengambilan contoh sedimen dan bentos
Alat yang digunakan untuk mengambil contoh sedimen dasar laut dan bentos adalah sebagai berikut Van veen grab (Lampiran 4), ember berukuran sedang, kantong plastik, ayakan, botol film, kertas label, alat-alat tulis dan formalin 4%.
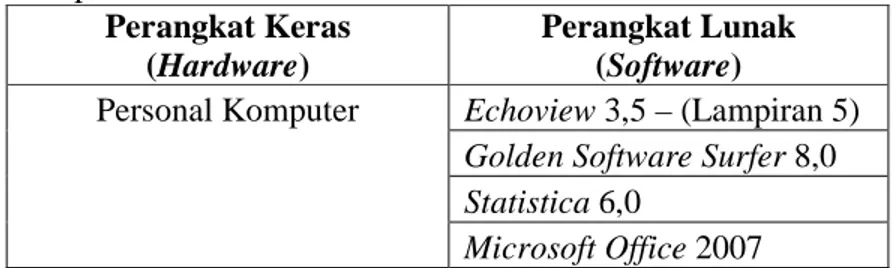
Alat yang digunakan untuk pengolahan data pada penelitian ini dapat dilihat pada Tabel 5.
Tabel 5. Alat pemrosesan data Perangkat Keras
(Hardware)
Perangkat Lunak (Software)
Personal Komputer Echoview 3,5 – (Lampiran 5) Golden Software Surfer 8,0
Statistica 6,0
Microsoft Office 2007
3.3. Pengambilan data akustik
Data akustik diambil dengan menggunakan instrumen echosounder split beam SIMRAD EY 60. Alat ini dioperasikan secara kontinu dengan kecepatan kapal berkisar 4 knot. Prinsip kerjanya adalah pengiriman pulsa energi
gelombang suara dari permukaan laut melalui transmitting transducer secara vertikal ke dasar laut. Kemudian suara yang dikirim ke permukaan dasar laut dipantulkan kembali dan diterima oleh receiver amplifier. Transducer diletakkan pada setengah badan kapal sebelah kiri. Gelombang suara yang diterima akan ditransformasikan menjadi pulsa energi listrik ke receiver. Sinyal-sinyal tersebut diperkuat dan direkam pada recorder dalam bentuk grafis maupun digital. Proses pengambilan data akustik dapat dilihat pada Gambar 5.
Sea-bed
Gambar 5. Diagram alir pengambilan data
3.4. Pengambilan contoh sedimen
Pengambilan contoh sedimen dilakukan pada 7 stasiun yang berada di perairan Sumur, Banten dengan menggunakan Van veen grab dengan luas bukaan sebesar 20 × 20 cm2. Contoh sedimen yang diambil dimasukkan ke dalam kantung plastik yang selanjutnya dianalisis dengan metode ayakan bertingkat. Jenis / tipe substrat (sedimen) beserta ukuran sedimen diketahui setelah dilakukan
Transducer GPS Simrad ER 60 Simrad EY 60 Display Sea-bed Posisi Lintang dan Bujur
analisis tekstur sedimen di Balai Penelitian Tanah Laboratorium Fisika Tanah Bogor pada tanggal 23 Oktober 2007 sampai 26 Oktober 2007.
3.5. Pengambilan contoh makrozoobenthos
Pengambilan contoh makrozoobenthos dilakukan dengan menggunakan alat Van veen grab dengan luasan 20 × 20 cm2 dimana sedimen yang diambil sebagian disaring untuk mendapatkan organisme bentos yang ada pada substrat tersebut. Setelah disaring, hasil saringan berupa organisme bentos dimasukkan ke dalam kantong plastik dan diberi larutan formalin 4% dan kemudian diidentifikasi dengan buku identifikasi Abbott (1991), Dharma (1988) dan Gosner (1971) pada Laboratorium Biologi Laut Departemen Ilmu dan Teknologi Kelautan IPB dan Laboratorium Bioekologi Departemen Manajemen Sumberdaya Perairan IPB. Pengambilan contoh bentos ini dilakukan pada tiap stasiun dengan satu kali ulangan, dimana pengambilan contoh sampel ini didasarkan pada track kapal pada saat pengambilan data.
3.6. Analisis data
3.6.1. Analisis data akustik
Kontur dasar perairan perlu diketahui untuk melihat karateristik dari suatu dasar perairan. Kontur dasar perairan dapat dibuat berdasarkan data posisi berupa lintang (latitude) dan bujur (longitude) dan kedalaman dari hasil survei akustik. Data yang ada ditabulasikan menggunakan Microsoft excel kemudian diolah menggunakan software Surfer 8,0 yang dapat merangkai titik koordinat berdasarkan kedalaman. Hasil rangkaian data tersebut dapat menjadi tampilan batimetri yang memperlihatkan kontur dasar perairan.
Data akustik yang telah diperoleh menggunakan SIMRAD EY 60 scientific echosounder system dalam bentuk echogram, diolah dan dianalisis menggunakan software Echoview versi 3,5. Proses analisis data dapat dilihat pada Gambar 6.
Gambar 6. Diagram alir analisis data
Pada proses integrasi, echogram harus diatur terlebih dahulu berdasarkan informasi yang diinginkan. Hal yang harus dilakukan pada proses ini adalah pada menu Echoview 3,5 pilih echogram, pilih variable properties (F8) kemudian masukkan nilai-nilai yang akan diamati. Pada distance grid menggunakan 500 ping yang berarti pembagian EDSU (Elementary Distance Sampling Unit) berdasarkan jumlah ping dengan range grid sebesar 50,00 m. Color display minimum yang digunakan sebesar -50,00 dB, maksimum 0 dB dan color display
Echogram Echoview 3.5 SV rata-rata Variable Properties Kalibrasi Depth rata-rata Integrasi
(E1 dan E2)
Posisi Lintang Bujur Kecepatan suara (m/s) Transmitted pulse length (s)
range sebesar 50,00, dimana nilai ini diperlukan untuk mengetahui nilai E1 (energy of the 1st bottom echo). Nilai E2 (energy of the 2nd bottom echo) pada second bottom diketahui dengan menggunakan color display minimum sebesar -70,00 dB, maksimum 0 dB dan color display range sebesar 70,00.
Penentuan daerah yang akan dianalisis pada first bottom dilakukan dengan membuat dua garis pada dasar perairan menggunakan line draw tool (2), dimana garis pertama dibuat melalui new line sehingga akan terbentuk line 1. Hal yang sama juga dilakukan untuk membentuk garis kedua dengan jarak tertentu dari garis pertama. Jarak yang terbentuk dibuat sesuai dengan luasan area yang akan dianalisa dalam hal ini jarak yang digunakan sebesar 0,10 m ke arah dalam dasar perairan dari garis pertama. Setelah garis pertama dan garis kedua terbentuk, kemudian pada echogram, variable properties (F8) pilih analysis, pada exclude above line masukkan nilai line 1 dan exclude below line masukkan nilai line 2. Analisis second bottom, pembuatan garis agak sedikit berbeda dimana pembuatan line 1 dilakukan secara manual mengikuti kontur dasar perairan second bottom, sedangkan garis kedua secara otomatis akan mengikuti bentuk garis pertama dengan jarak 0,10 m (Lampiran 6).
Proses integrasi dimana nantinya akan diperoleh informasi, klik kanan pada tiap EDSU yang terbentuk, pilih integrate cell maka akan muncul hasil dari integrasi dari EDSU yang terpilih berupa Sv mean (dB), NASC (m2n-1mi-2), ABC (m2m-2) dan depth mean (m). Nilai-nilai hasil integrasi tiap EDSU berupa Sv mean (dB) dan depth mean (m) beserta dengan posisinya ditabulasikan ke dalam Microsoft excel. Hal yang sama dilakukan juga untuk second bottom.
3.6.2. Analisis sedimen
Klasifikasi metode analisis besar butir dilakukan dengan menggunakan metode ayakan bertingkat dengan langkah-langkah sebagai berikut:
1. Contoh substrat diambil dari lapangan dan diperkirakan beratnya pada waktu kering minimal 100 gram basah.
2. Substrat tersebut dikeringkan dalam oven dengan suhu 1000C sampai benar-benar kering (± 24 jam).
3. Contoh diayak dengan Shieve shaker (Lampiran 7) berukuran 2 mm. 4. Berat asal kering contoh ditimbang dengan berat 10 gram.
5. Selanjutnya ditambahkan H2O2 30% sebanyak 100 ml dan didiamkan
selama semalam. Setelah itu contoh substrat dimasak untuk menghilangkan bahan organik.
6. Contoh substrat kemudian diayak dengan ayakan berukuran 325 mesh (mesh = banyaknya lubang (hole) dalam 1 mm2).
7. Hasil ayakan ini kemudian dimasukkan ke dalam Shieve shaker (5 ukuran mata ayakan) untuk kemudian diayak sehingga menghasilkan 5 ukuran besar butir sedimen yang nantinya akan digolongkan ke dalam substrat pasir.
8. Hasil lain dari ayakan berukuran 325 mesh yang dalam keadaan cair ditambahkan larutan Na2P2O7 . 10H2O untuk selanjutnya dianalisis untuk
mengetahui substrat lumpur dan liat yang dilakukan dengan cara pemipetan dengan ukuran pipet 20 cc.
9. Untuk menentukan fraksi lumpur, larutan didiamkan selama 1 – 15 menit. Selanjutnya untuk fraksi liat dimana ukurannya sangat kecil, maka larutan
tersebut didiamkan selama 3,5 sampai 24 jam untuk selanjutnya ditentukan persentasenya.
3.6.3. Analisis populasi dan komunitas
Keanekaragaman ditentukan oleh dua hal penting, yaitu jumlah taksa yang berbeda (spesies memberikan keanekaragaman spesifik dan genus memberikan keanekaragaman genetik) dan regularitas/keseragaman yang mencerminkan penyebaran individu dalam satu kategori sistematik (Bengen, 2000).
Keanekaragaman makrozoobenthos merupakan jumlah dari makrozoobenthos yang hidup pada suatu wilayah atau areal tertentu. Nilai keanekaragaman ini dihitung dengan menggunakan Indeks Shannon dengan rumus sebagai berikut (Bengen 2000). H’ = -
∑
= s i i i N n N n 1 2 log = -∑
= s i 1 ( pi log2 pi ) ... (1) pi = N ni ... (2) dimana : H’ = Indeks Keanekaragaman Shannon-Wienerpi = Proporsi spesies ke – i terhadap jumlah total
ni = Jumlah individu pada spesies ke – i
N = Jumlah individu total
Keseragaman dari makroozoobenthos merupakan proporsi dari masing-masing spesies makrozoobenthos yang hidup pada tempat tertentu dimana nilai keseragaman ini dapat dilihat dari Indeks Shannon-Wiener dengan rumus sebagai berikut (Bengen 2000). E = Maks H H ' ' ; H’ maks = log2 S ... (3)
dimana : E = Indeks Keseragaman jenis
H’ = Indeks Keanekaragaman Shannon-Wiener S = Jumlah spesies
Dominansi makrozoobenthos merupakan spesies dari makrozoobenthos yang paling banyak dijumpai. Spesies yang mendominasi ini dapat menentukan dan mengendalikan kehadiran dari spesies lain (Odum, 1971). Untuk melihat adanya dominansi maka digunakan Indeks Simpson, yakni
D =
∑
= s i 1 ) ( N ni 2 ... (4) dimana : D = Indeks Dominansini = Jumlah individu pada spesies ke-i
N = Jumlah total individu dari semua spesies s = Jumlah spesies atau taksa
Kepadatan makrozoobenthos didefinisikan sebagai jumlah individu makrozoobenthos per satuan luas (m2). Contoh makrozoobenthos yang telah diidentifikasi dihitung kepadatannya dengan rumus sebagai berikut (Krebs, 1989).
K = b a × 10000 ... (5)
dimana : K = Kepadatan makrozoobenthos (individu/m2) a = Jumlah makrozoobenthos (individu) b = Luas bukaan Van veen grab (cm2) 10000 = Konversi dari cm2 ke m2
2.6.4. Analisis Komponen Utama (Principal Component Analysis)
Analisis Komponen Utama (AKU) adalah metode statistik deskriptif yang bertujuan untuk menghasilkan suatu grafik yang memudahkan interpretasi dan
mempelajari suatu tabel / matrik data dari sudut pandang kemiripan antar individu atau hubungan antar variabel (Bengen, 2000). Analisis Komponen Utama ini bertujuan untuk :
1. Mengidentifikasi peubah baru yang mendasari data peubah ganda. 2. Mengurangi banyaknya dimensi himpunan peubah yang biasanya terdiri
dari peubah yang banyak dan saling berkorelasi menjadi peubah baru yang tidak berkorelasi dengan mempertahankan sebanyak mungkin keragaman dalam data.
3. Menghilangkan peubah-peubah asal yang mempunyai sumbangan informasi yang kecil.
Pada penelitian ini Analisis Komponen Utama digunakan untuk melihat hubungan antara komposisi partikel dari tipe substrat dan nilai backscattering volume dasar perairan serta hubungannya dengan komunitas makrozoobenthos. Hasil Analisis Komponen Utama yang dilakukan terhadap matriks korelasi menghasilkan sumbu-sumbu faktorial yang mengekstraksi secara maksimum informasi-informasi yang didapat dari parameter-parameter yang digunakan.
Pada prinsipnya Analisis Komponen Utama menggunakan pengukuran jarak Ecluidean (sudut), yaitu jumlah kuadrat perbedaan antara individu-individu (baris) untuk variabel (kolom) yang sesuai. Semakin kecil jarak Ecluidean antar dua individu maka semakin mirip karateristiknya dan semakin jauh jarak
4. HASIL DAN PEMBAHASAN
4.1. Profil batimetri perairan Sumur
Pada Gambar 7 terlihat profil batimetri perairan Sumur yang diperoleh dari hasil pemetaan batimetri pada data echogram, dimana dari gambar tersebut dapat dilihat pola batimetri perairan yang tidak rata. Perairan Sumur termasuk dalam kategori perairan dangkal dengan rata-rata kedalaman sebesar 13,31 meter. Kedalaman perairan yang terdeteksi menunjukkan adanya variasi kedalaman yang berbeda untuk setiap posisi lintang dan bujur. Pada daerah sepanjang -6040’12” LS sampai -6043’12” LS terlihat bahwa daerah tersebut berada pada strata kedalaman yang sama dimana kedalamannya berkisar antara 20,00 – 24,00 m yang kedalamannya semakin dangkal ke arah daratan.
Sumber : Diolah dari Lampiran 8
Pada Gambar 7 juga terlihat bahwa pada lintang dan bujur tertentu terdapat pola batimetri yang curam dimana lokasinya tidak berada jauh dari daratan. Bentuk batimetri yang lain ada yang berbentuk seperti tonjolan / bukit yang
terlihat pada posisi -6042’36,00” LS dan 105030’36,00” BT dan juga pada posisi -6040’12,00” LS dan 105033’00” BT. Posisi terdangkal yaitu 1,86 m berada pada posisi -6040’50,40” LS dan 105034’6,60” BT, sedangkan kedalaman tertinggi sebesar 23,78 m didapatkan pada posisi -6041’37,20” LS dan 105033’7,92” BT.
4.2. Sedimen dasar laut
Tipe substrat dasar perairan Sumur hasil survei umumnya berupa pasir dan lumpur (Gambar 8). Berdasarkan hasil analisis tekstur sedimen, sedimen
permukaan dasar laut pada lokasi penelitian dapat dipisahkan menjadi 3 tipe sedimen yaitu : pasir (5 fraksi, ukuran mata ayakan 1.000-2.000 µm, 500-1.000 µm, 200-500 µm, 100-200µm dan 50-100 µm), lumpur (3 fraksi, ukuran 20-50 µm, 10-20 µm dan 2-10 µm) dan liat (2 fraksi, ukuran 0,5-2 µm dan 0-0,5 µm). Sebagian besar sedimen permukaan dasar laut yang ditemukan pada tiap stasiun di lokasi penelitian adalah pasir dimana dari ketujuh stasiun pengamatan terdapat empat stasiun yang dominasi substrat pasir berada di atas 50%, selanjutnya untuk lumpur dua dari tujuh stasiun pengamatan berada di atas 50%. Persentase sebaran substrat di perairan Sumur dapat dilihat pada Gambar 8.
Hasil analisis komposisi ukuran partikel pada contoh substrat yang diambil di perairan Sumur dengan mempergunakan Van veen grab di Balai Penelitian Tanah Laboratorium Fisika Tanah Bogor menunjukkan bahwa dari 7 stasiun pengamatan, ditemukan 4 stasiun yang didominasi oleh substrat pasir dan 3 stasiun yang didominasi oleh substrat lumpur (Gambar 8).
Sumber : Diolah dari Lampiran 11 Gambar 8
4.2.1. Pasir
Fraksi pasir secara keseluruhan didapatkan pada setiap stasiun pengamatan dimana persentase pasir sebesar
tipe pasir mempunyai kenampakan
ukuran pasir yaitu berkisar antara 50 µm sampai 2.000 µm. dari sedimen fraksi pasir
pada posisi -6040’26,40”
besar dibanding persentase dari fraksi sebesar 6,40% dan 5,70% (Gambar Stasiun 7 berada pada kedalaman ± 3 m.
pasir tertinggi dapat dilihat bahwa persentase dari lumpur dan liat
jauh. Hal ini dikarenakan stasiun tersebut berada dekat dengan pantai dimana distribusi dari fraksi-fraksi ini dipengaruhi oleh proses oseanografi seperti arus. Fraksi pasir yang memiliki kenampakan megaskopis akan lebih cepat mengendap dibandingkan dengan fraksi lumpur dan liat pada daerah yang mengalami proses turbulensi yang tinggi karena fraksi lumpur dan liat berukuran sangat kecil
Sumber : Diolah dari Lampiran 11
Gambar 8. Persentase substrat di lokasi penelitian
Fraksi pasir secara keseluruhan didapatkan pada setiap stasiun pengamatan dimana persentase pasir sebesar 47,47% dari persentase total sedimen. Sedimen tipe pasir mempunyai kenampakan megaskopis. Berdasarkan analisis besar butir berkisar antara 50 µm sampai 2.000 µm. Persentase terbesar dari sedimen fraksi pasir didapatkan pada Stasiun 7 sebesar 87,90% yang terletak
” LS dan 105033’10,80” BT dimana nilainya jauh dibanding persentase dari fraksi lumpur dan liat yang secara berurutan
% (Gambar 9). Jika dilihat berdasarkan kedalaman, tasiun 7 berada pada kedalaman ± 3 m. Pada stasiun yang memiliki persentase pasir tertinggi dapat dilihat bahwa persentase dari lumpur dan liat sangat berbeda jauh. Hal ini dikarenakan stasiun tersebut berada dekat dengan pantai dimana
fraksi ini dipengaruhi oleh proses oseanografi seperti arus. Fraksi pasir yang memiliki kenampakan megaskopis akan lebih cepat mengendap
ibandingkan dengan fraksi lumpur dan liat pada daerah yang mengalami proses turbulensi yang tinggi karena fraksi lumpur dan liat berukuran sangat kecil
Fraksi pasir secara keseluruhan didapatkan pada setiap stasiun pengamatan Sedimen besar butir, Persentase terbesar
yang terletak nilainya jauh lebih lumpur dan liat yang secara berurutan
Jika dilihat berdasarkan kedalaman, Pada stasiun yang memiliki persentase
sangat berbeda jauh. Hal ini dikarenakan stasiun tersebut berada dekat dengan pantai dimana
fraksi ini dipengaruhi oleh proses oseanografi seperti arus. Fraksi pasir yang memiliki kenampakan megaskopis akan lebih cepat mengendap
ibandingkan dengan fraksi lumpur dan liat pada daerah yang mengalami proses turbulensi yang tinggi karena fraksi lumpur dan liat berukuran sangat kecil
sehingga masih dapat dibawa oleh arus ke tempat lain. di perairan Sumur pada b
(Purwandani, 2001).
Gambar 10 menggambarkan
interpolasi dari semua stasiun pengamatan. Distribusi pasir tertinggi ter Stasiun 7 sebesar 87,90% yang terlet
105033’10,80” BT sedangkan persentase terendah ditemukan pada sebesar 7% dimana terletak pada posisi
Berdasarkan Gambar 10 dapat dilihat bahwa sebaran pasir di lokasi penelitian tidak terlalu merata dan hanya terdapat pada lokasi
besar posisi stasiunnya berada dekat dengan pantai yang mendapat pengaruh arus yang sangat kuat.
Sumber : Diolah dari
sehingga masih dapat dibawa oleh arus ke tempat lain. Rata-rata kecepatan arus di perairan Sumur pada bulan September yaitu berkisar antara 4 – 5 knot
nggambarkan sebaran fraksi pasir yang merupakan hasil interpolasi dari semua stasiun pengamatan. Distribusi pasir tertinggi ter
% yang terletak pada posisi -6040’26,40” LS dan sedangkan persentase terendah ditemukan pada Stasiun 4 % dimana terletak pada posisi -6041’13,20” LS dan 105032’25” Berdasarkan Gambar 10 dapat dilihat bahwa sebaran pasir di lokasi penelitian tidak terlalu merata dan hanya terdapat pada lokasi-lokasi tertentu dan sebagian besar posisi stasiunnya berada dekat dengan pantai yang mendapat pengaruh arus
umber : Diolah dari Lampiran 11 Gambar 9. Persentase pasir
rata kecepatan arus 5 knot
sebaran fraksi pasir yang merupakan hasil interpolasi dari semua stasiun pengamatan. Distribusi pasir tertinggi terlihat pada
LS dan Stasiun 4
” BT. Berdasarkan Gambar 10 dapat dilihat bahwa sebaran pasir di lokasi penelitian lokasi tertentu dan sebagian besar posisi stasiunnya berada dekat dengan pantai yang mendapat pengaruh arus
Sumber : Diolah dari Lampiran 11
Gambar 10. Distribusi persentase fraksi pasir
4.2.2. Lumpur
Berdasarkan analisis ukuran butir sedimen menunjukkan bahwa ukuran fraksi lumpur berkisar antara 2 µm sampai 50 µm. Lumpur ini berwarna coklat. Sedimen fraksi lumpur umumnya mudah terbawa oleh arus dan mudah teraduk bila terjadi proses turbulensi atau upwelling. Pengendapan fraksi lumpur sangat lambat, sehingga posisi lumpur selalu di atas dari lapisan permukaan dasar laut. Stasiun lokasi pengamatan yang memiliki persentase fraksi lumpur terbesar yaitu pada Stasiun 1 sebesar 75,60% yang terletak pada posisi -6043’33,60” LS dan 105030’6,59” BT dan yang terendah terdapat pada Stasiun 7 sebesar 6,40% pada posisi -6040’26,40” LS dan 105033’10,80” BT. Stasiun 7 memiliki kandungan fraksi lumpur yang paling sedikit hal ini dikarenakan pada stasiun ini didominasi