1
KENDALI PID DAN LOGIKA FUZZY UNTUK OPTIMALISASI
PERGERAKAN MOBILE ROBOT
M.Nasrul Hafidz
1)1) Program Studi S-1 Sistem Komputer, STIKOM Surabaya. Email: [email protected] M.Fahmi Ibnu Mas’ud2)
2) Program Studi S-1 Sistem Komputer, STIKOM Surabaya. Email: [email protected]
Abstract
KRI (Indonesian Robot Contest) is one of the race-level colleges both private and state in Indonesia. Most robots are contest is the type of mobile robot. Obstacles often encountered in the race KRI is the intensity of light that enters the sensor photodioda causing impaired. To overcome this optocoupler can be used with this sensor the robot can walk with relying on the motor right and left motor. Optocoupler is issuing digital voltage sensor by exploiting holes contained disc motor.
Distance and time the robot is used to analyze how much the speed of the robot by using fuzzy methods, while the method of PID is used to control the motor rotation right and left in order to go hand in hand and the same. Programming is used to enter the program to a minimum system is to use a software system codevision Avr.
Keywords : Photodiode, microcontroller, Optocoupler, Fuzzy method, PID method, Codevision Avr.
1. PENDAHULUAN
1.1 Latar BelakangKRI (Kontes Robot Indonesia) adalah salah satu perlombaan tingkat nasional untuk level perguruan tinggi. Perlombaan ini diadakan setiap tahun dengan tema yang berbeda–beda. Contohnya pada tahun 2010 temanya adalah “Bersama Membangun Candi Prambanan”, pada tahun 2011 adalah “Larungan”, pada tahun 2012 adalah “Grebeg Berkah Kedamaian dan Kesejahteraan”. Jenis robot yang diperlombakan pada KRI kebanyakan adalah mobile robot yang harus mencapai poin-poin tertentu pada arena yang sudah ditentukan dengan akurat dan cepat.
Pada umumnya, robot yang dibuat menggunakan garis lapangan sebagai panduan(line follower). Sehingga supaya robot dapat mengikuti garis lapangan, robot dilengkapi dengan sensor garis, yaitu sensor photodioda. Sensor photodioda adalah sensor
yang tegangan outputnya sesuai dengan intensitas cahaya yang diterimanya, karena itu sensor tersebut sangat sensitif terhadap cahaya.
Penggunaan sensor photodioda pada robot di KRI memiliki permasalahan, yaitu lampu sorot yang digunakan sangat terang sehingga mengganggu sensor meskipun sensor sudah diberi tutup sebagai langkah pengamanan. Untuk mengatasi masalah tersebut, sensor alternatif yang dapat digunakan pada mobile robot dalam perlombaan KRI tersebut adalah rotary encoder, yang dapat digunakan untuk menghitung putaran motor. Dengan demikian, jarak yang sudah ditempuh dapat diketahui.
Dengan menggunakan jarak dan waktu sebagai input, dibuat sistem fuzzy untuk mengatur kecepatan robot agar jarak yang sudah ditentukan dapat ditempuh dengan waktu yang diinginkan. Output kecepatan dari fuzzy akan diolah oleh pengendali PID
2
(Proporsional Integral Derivative) untukmengatur kecepatan putaran motor kanan dan kiri dengan menggunakan sinyal PWM(Pulse With Modulation).
1.2 Tujuan
Adapun tujuan dari pembuatan kendali mobile robot adalah sebagai berikut:
1. Untuk merancang sistem fuzzy yang digunakan untuk optimalisasi kecepatan sesuai dengan jarak dan waktu tempuh robot.
2. Untuk merancang pengendali PID yang digunakan untuk mengendalikan putaran motor pada mobile robot.
1.3 Pembatasan Masalah
Dalam perancangan dan pembuatan alat ini, terdapat beberapa pembatasan masalah, antara lain :
1. Perancangan dan pembuatan mobile robot ini menggunakan minimum system AVR (Alf and Vegard’sRisc processor) yang diproduksi oleh ATMEL.
2. Proses kecepatan robot menggunakan fuzzy logic.
3. Proses pengendalian putaran motor pada mobile robot menggunakan metode kontrol PID.
4. Sistem yang dikontrol adalah motor DC 12V.
II. DASAR TEORI
2.1 Kendali FuzzyFuzzy berarti samar, kabur atau tidak jelas. Fuzzy adalah istilah yang dipakai oleh Lotfi A Zadeh pada bulan Juli 1964 untuk menyatakan kelompok / himpunan yang dapat dibedakan dengan himpunan lain berdasarkan derajat keanggotaan dengan batasan yang tidak begitu jelas (samar), tidak seperti himpunan klasik yang membedakan keanggotaan himpunan menjadi dua, himpunan anggota atau bukan anggota.
Kendali logika fuzzy dilakukan dalam tiga tahap, yaitu fuzzyfication, evaluasi aturan
(basis pengetahuan) dan mekanisme pengambilan keputusan dengan metode rerata terbobot.
Metode Sugeno
Metode ini diperkenalkan oleh Takagi-Sugeno Kang pada tahun 1985, sehingga metode ini sering juga dinamakan dengan metode TSK.
Menurut Cox (1994), metode TSK terdiri dari 2 jenis yaitu :
1. Metode Fuzzy Sugeno Orde-Nol
secara umum bentuk model fuzzy Sugeno Orde-Nol adalah :
IF (x1 is A1)*(x2 is A3)*(x3 is A3)*...*(xN is AN) THEN z = k
Dengan Ai adalah himpunan fuzzy ke-i sebagai anteseden, dan k adalah suatu konstanta (tegas) sebagai konsekuen.
2. Metode Fuzzy Sugeno Orde-Satu
Secara umum bentuk model Fuzzy Sugeno Orde-Satu adalah :
IF (x1 is A1)*...*(xN is AN) THEN z = p1*x1 + ...+ pN*xN + q
Dengan Ai adalah himpunan Fuzzy ke-i sebagai anteseden, dan pi adalah suatu konstanta (tegas) ke-i dan q juga merupakan konstanta dalam konsekuen.
Apabila komposisi aturan menggunakan metode SUGENO, maka defuzzyfication dilakukan dengan cara mencari nila rata-ratanya (Kusumadewi, 2010).
2.2 Kotrol PID (Proporsional Integral
Derivatif )
Pengendali PID (Proporsional Integral Derivatif), merupakan gabungan dari tiga sistem kendali yang bertujuan untuk mendapatkan keluaran dengan risetime yang tinggi dan galat yang kecil. Seperti yang kita ketahui bahwa sistem kendali Proporsional memiliki keunggulan yaitu risetime yang cepat tetapi sangat rentan dengan overshot/undershot, sistem kendali integral memiliki keunggulan untuk meredam galat, sedangkan sistem kendali Derivative memiliki
3
keunggulan untuk memperkecil delta error ataumeredam overshot/undershot. PID berdasarkan implementasinya dibedakan menjadi analog dan digital, PID analog diimplementasikan dengan komponen elektronika resistor, capacitor, dan operational amplifier, sedangkan PID digital diimplementasikan secara program.
PID digital pada dasarnya merupakan suatu proses dari suatu program yang dijalankan dengan menggunakan komputer. Dalam prosesnya nilai yang kita masukkan (setting point), dan nilai hasil pembacaan sensor saat ini (present value) diproses sehingga galat yang didapatkan sama dengan 0 (nol), atau nilai setting point sama dengan present value. Untuk dapat mengimplementasikan kendali PID pada sistem digital, maka PID harus diubah kedalam persamaan diskrit (Embedded, 2006).
2.3 Microcontroller ATmega16
AVR merupakan seri microcontroller CMOS 8-bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register general-purpose, timer/counter fleksibel dengan mode compare, interrupt internal dan eksternal, serial UART, programmable watchdog timer, dan mode power saving, ADC (Analog to Didital Converter) dan PWM (Pulse With Modulation) internal.
AVR juga mempunyai In-system programmable flash on-chip yang mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan SPI (Serial Peripheral Interface) (ATMEL, 2011).
Komunikasi SPI (Serial Pheripheral
Interface)
Microcontroller keluarga Atmel memiliki kemampuan untuk komunikasi serial. Komunikasi SPI (Serial Pheripheral Interface) pada microcontroller ini berjalan ketika microcontroller Master mereset nilai pin SS (Slave Select). Kemudian microcontroller Master dan slave menyiapkan data yang akan dikirim pada register mereka yaitu register
SPDR. Setelah itu microcontroller Master menghasilkan pulsa clock pada pin SCK untuk memulai komunikasi data. Pertukaran data telah dilakukan maka SPIF (Setting The End of Transmision Flag) akan diset, jika interrupt bit SPIE pada SPCR maka akan terjadi interrupt.
Gambar 1. Interkoneksi SPI Master-slave (Saputra, 2010)
III. PERANCANGAN
3.1 Perancangan Mekanik Robot
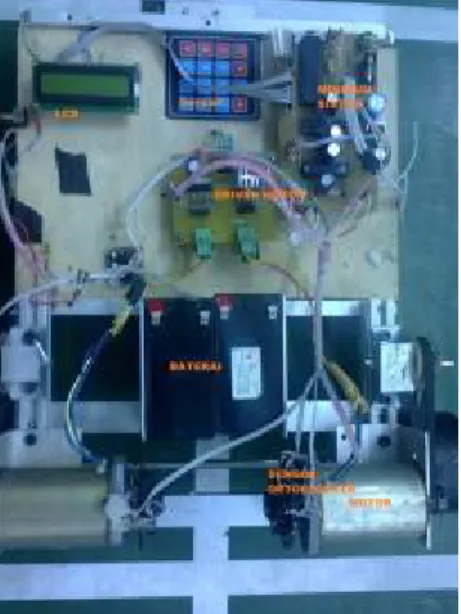
Robot yang digunakan penulis terdiri atas 2 buah roda disertai motor yang terletak disisi kiri dan kanan bagian base robot digunakan untuk menjalankan robot. Berikut arsitektur robot secara detail adalah sebagai berikut.
Gambar 1 Desain keseluruhan robot
3.2 Perancangan Minimum sistem
Secara garis besar dari keseluruhan sistem pada alat ini sesuai dengan blok diagram pada Gambar 2.
4
Input : jarak dan waktu Motor kanan Motor kiri Minimum sistem slave Proses PID Minimum sistem slave Proses PID Minimum sistem master Proses Fuzzy Feedback kecepatan Feedback kecepatan spi spi Feedback jarak Sensor jarakGambar 2. Blok diagram sistem keseluruhan
sistem ini memiliki input berupa jarak dan waktu yang kemudian akan menjadi inputan fuzzy yang diproses oleh microcontroller ATmega 16 sebagai Master. Dalam metode fuzzy yang digunakan adalah metode Sugeno yang juga dikenal sebagai metode min-max. Setelah proses fuzzy selesai dilakukan oleh mikro Master, maka mikro Master akan mengeluarkan output berupa kecepatan (dalam satuan rpm) yang kemudian akan dikirim ke microcontroller ATmega 8 sebagai slave. Mikro slave pada tugas akhir kali ini berfungsi sebagai pengontrol motor kanan dan motor kiri yang satu sama lain tidak saling berkomunikasi.
Pada mikro slave dilakukan proses kendali PID yang digunakan untuk mengontrol motor kanan dan motor kiri. Di mana proses PID mendapatkan input berasal dari mikro Master yang mengirimkan data rpm yang selalu berubah-ubah sesuai dengan output fuzzy yang dihasilkan.
3.3 Perancangan Driver Motor L298
Driver motor merupakan salah satu komponen terpenting dalam pengerjaan tugas akhir kali ini, di mana driver motor digunakan sebagai pengendali motor DC. Dalam konteks tugas akhir kali ini driver motor yang
digunakan penulis adalah komponen driver motor L298.
Gambar 3. Rangkaian driver motor L298
3.3 Program kendali Fuzzy
Program kendali fuzzy terdiri atas fuzzyfication, evaluasi aturan, mekanisme pengambilan keputusan metode Sugeno. Keluaran pada proses mekanisme pengambilan keputusan metode Sugeno merupakan hasil dari proses kendali fuzzy secara keseluruhan untuk mendapatkan nilai tegasnya yaitu sinyal kontrol (rpm). Blok diagram program kendali fuzzy diperlihatkan pada Gambar 4.
5
Gambar 4. Flowchart fuzzy logicFuzzyfication
Fuzzyfication adalah proses pemetaan input crisp ke dalam himpunan-himpunan fuzzy dalam bentuk fungsi keanggotaan. Tujuan dari fuzzyfication adalah untuk mendapatkan derajat keanggotaan dari hasil pemetaan input crisp kedalam fungsi keanggotaan yang bersesuaian. Derajat keanggotaan bernilai antara 0 dan 1. Tahapan awal proses fuzzyfication adalah menentukan parameter-parameter fungsi keanggotaan pada setiap himpunan fuzzy masukan. Pada pemrograman fuzzyfication ini digunakan parameter fungsi keanggotaan masukan berupa nilai jarak dan nilai waktu. Gambar 5 dan Gambar 6 merupakan parameter fungsi keanggotaan jarak dan waktu.
Gambar 5 Fungsi keanggotaan jarak
Gambar 6 Funsi keanggotaan waktu
Sedangkan realisasi proses memperoleh derajat keanggotaan dari masing – masing fungsi keanggotaan adalah sebagai berikut. dk[0]=derajat_keanggotaan(-900,-800,0,100,s_jarak); dk[1]=derajat_keanggotaan(0,400,40 0,800,s_jarak); dk[2]=derajat_keanggotaan(400,800, 1200,1600,s_jarak); dk[3]=derajat_keanggotaan(1200,160 0,3000,3400,s_jarak); dk[4]=derajat_keanggotaan(-20,-16,0,1,t_waktu); dk[5]=derajat_keanggotaan(0,4,4,8, t_waktu); dk[6]=derajat_keanggotaan(4,8,12,1 6,t_waktu); dk[7]=derajat_keanggotaan(12,16,30 ,34,t_waktu); Evaluasi Aturan
Rule set / Evaluasi aturan adalah proses mengevaluasi derajat keanggotaan tiap-tiap fungsi keanggotaan himpunan fuzzy masukan ke dalam basis aturan yang telah ditetapkan. Tujuan dari evaluasi aturan ini adalah menentukan derajat keanggotaan dari keluaran fuzzy. Sebelum melakukan evaluasi aturan terlebih dahulu ditetapkan basis aturan. Basis aturan merupakan keseluruhan aturan dari kombinasi dua masukan yang mungkin.
6
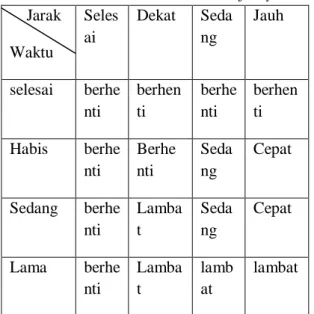
Secara lengkap, jumlah kombinasi yangmungkin dari dua himpunan fuzzy masukan dengan masing-masing tiga fungsi keanggotaan sehingga jumlah aturannya adalah sembilan aturan. Basis aturan yang dibuat berdasarkan tingkah laku plant yang diinginkan.
Tabel 1. Basis aturan kendali fuzzy Jarak Waktu Seles ai Dekat Seda ng Jauh selesai berhe nti berhen ti berhe nti berhen ti Habis berhe nti Berhe nti Seda ng Cepat Sedang berhe nti Lamba t Seda ng Cepat Lama berhe nti Lamba t lamb at lambat
pengambilan keputusan yang digunakan dalam pemrograman ini adalah implikasi Min. Setelah proses fuzzyfication dieksekusi, dilakukan proses agregasi dengan mengambil nilai maksimal dari masing–masing fungsi keanggotaan variable keluaran. Realisasi proses evaluasi aturan dalam bentuk program adalah sebagai berikut :
nilai_penyebut = k = 0; for (i = 0; i < 4; i++) { for (j = 4; j < 8; j++) { u[k]=rule_set(dk[i],dk[j]); nilai_penyebut= nilai_penyebut+u[k++]; } }k=0;
float rule_set(float a,float b) {
float nilai;
nilai = fmin(a,b); return nilai;}
Defuzzyfication
Defuzzyfication adalah kebalikan dari proses fuzzyfication, yaitu mengubah himpunan
fuzzy keluaran menjadi keluaran tegas (crisp). Pengubahan ini diperlukan karena konstanta kendali PID hanya mengenal nilai tegas sebagai variabel sinyal kontrol. Perancangan ini, menggunakan sebuah himpunan fuzzy keluaran dengan fungsi keanggotaannya berupa singleton, dapat dilihat sebagai berikut :
Gambar 7 Fungsi keanggotaan singleton
Hasil keluaran crisp output akan dikirim ke slave dengan komunikasi spi sebagai siinyak control PID. Realisasi proses pengambilan keputusan metode sugeno menjadi bentuk crisp output dalam bentuk program adalah sebagai berikut:
nilai_pembilang = 0; for (i=0;i < 16; i++)
nilai_pembilang = nilai_pembilang + u[i]; if (nilai_penyebut != 0) RPMdata = nilai_pembilang/nilai_penyebut; else RPMdata = 0;
3.4 Kendali PID
(Proportional-Integral-Derivative)
Pada desain tugas akhir kali ini kontrol PID mendapat inputan yang berasal dari metode fuzzy yang sebelumnya melakukan proses perhitungan fuzzyfication yang menghasilkan output berupa kecepatan. Dibawah ini merupakan formula kendali kontrol PID yang digambarkan melalui sebuah flowchart adalah sebagai berikut :
7
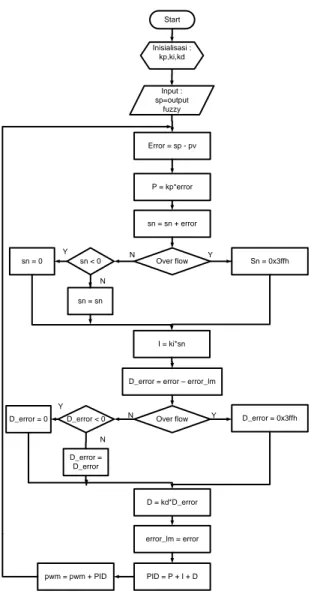
Start Error = sp - pv P = kp*error sn = sn + error Over flow Y Sn = 0x3ffh N I = ki*snD_error = error – error_lm
Over flow Y D_error = 0x3ffh N D = kd*D_error PID = P + I + D error_lm = error pwm = pwm + PID Input : sp=output fuzzy Inisialisasi : kp,ki,kd sn < 0 sn = 0 sn = sn Y N D_error < 0 D_error = 0 D_error = D_error N Y
Gambar 8. Flowchart kontrol PID
Dari program flowchart di atas dapat dilihat bahwa inputan kontrol PID berasal dari outputan fuzzy berupa kecepatan yang kemudian diolah melalui perumusan kontrol PID.
Pada kontrol PID terdapat feedback atau yang disebut dengan PV (Pivot) dari motor DC yang telah diolah oleh sensor rotary encoder yang akan digunakan sebagai perhitungan kontrol PID. Berikut merupakan cuplikan program pengambilan feedback oleh sensor rotary encoder :
Pv = 0;
delay_ms(100); pv = TCNT0*10; pv = (pv/55)*60;
Berikut merupakan cuplikan program kontrol P, kontrol I, dan kontrol D sebagai berikut :
1.
Kontrol P kp = 0.5; error = sp - pv; p = kp*error;2.
Kontrol I Ki = 0.00001; sn = sn_lm + error; if (sn > 1023) { sn = 1023; } else if (sn < 0) { sn = 0; } pi = ki*sn;3.
Kontrol D kd = 0.0001;delta_e = error - error_lm; if (delta_e > 1023) { delta_e = 1023; } else if (delta_e < 0) { delta_e = 0; } d = kd*delta_e;
4.
Kontrol PID pid=(kp*error)+(ki*sn)+(kd*d elta_e); pwm = pwm + pid; if (pwm > 1023) { pwm = 1023; } else if (pwm < 0) {pwm = 0;} IV PENGUJIAN SISTEM4.1 Pengujian minimum sistem
Pengujian minimum sistem bertujuan untuk mengetahui apakah minimum sistem dapat melakukan proses signature dan
8
download program ke microcontroller denganbaik.
Gambar 9. Tampilan chip signature
Pada Gambar 9 menunjukan bahwa minimum sistem telah berhasil men-download program ke microcontroller sehingga program telah berhasil dijalankan.
4.2 Pengujian Kontrol PID Tanpa Belt Pengujian kontrol PID dilakukan untuk mengetahui apakah rumusan yang digunakan dalam pembuatan kontrol PID dapat berjalan sesuai dengan yang diharapkan dan dapat menjalankan perintah dari inputan fuzzy untuk mengontrol motor DC.
Dari pengujian yang dilakukan di atas, didapatkan hasil sebagai berikut :
Tabel 2. Hasil pengujian kontrol PID Pengujian Ke- Setpoint (Rpm) Kecepatan Aktual Motor Kanan (Rpm) Kecepatan Aktual Motor Kiri (Rpm) 1. 1200 1200 1200 2. 1000 960-1020 960-1020 3. 700 660-720 660-720 4. 500 480-530 480-530 5. 300 180-360 180-360
Gambar 10. Pengujian PID pada motor DC dengan setpoint 1200 rpm.
Gambar 11. Pengujian PID pada motor DC dengan setpoint 1000 rpm
Dari pengujian kontrol PID tanpa menggunakan konversi belt pada motor kanan dan motor kiri secara bersamaan dapat terllihat bahwa pengujian terbaik adalah pada set point 1200 rpm. Dan rata-rata dalam lima kali percobaan sistem akan stabil pada 8 sampai 10 detik.
4.3 Pengujian Kontrol PID robot
berjalan
Pengujian kontrol PID pada saat robot berjalan sebagai berikut :
9
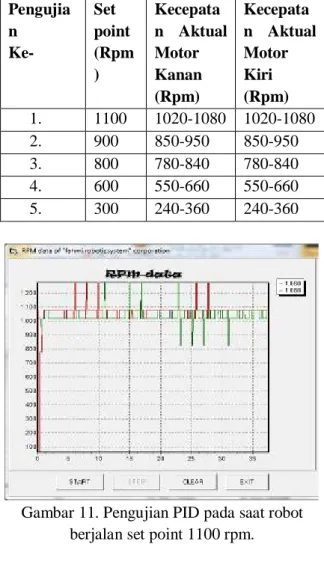
Tabel 3. Hasil pengujian kontrol PIDPengujia n Ke- Set point (Rpm ) Kecepata n Aktual Motor Kanan (Rpm) Kecepata n Aktual Motor Kiri (Rpm) 1. 1100 1020-1080 1020-1080 2. 900 850-950 850-950 3. 800 780-840 780-840 4. 600 550-660 550-660 5. 300 240-360 240-360
Gambar 11. Pengujian PID pada saat robot berjalan set point 1100 rpm.
Gambar 12. Pengujian PID pada saat robot berjalan set point 900 rpm.
Dari pengujian kontrol PID pada saat robot berjalan dapat disimpulkan bahwa robot berbelok ke kiri. Hal ini dikarenakan
responstime motor kiri lebih lambat dari pada responstime motor kanan.
4.3 Pengujian Logika Fuzzy
Dari pengujian yang dilakukan didapatkan hasil sebagai berikut :
Tabel 4. Hasil pengujian fuzzy Pengujian Ke- Input Jarak (meter) Input Waktu (Second) Output (Rpm) 1. 10 10 850 2. 12 12 850 3. 14 15 450 4. 16 15 700 5. 18 20 480
Gambar 13. Pengujian fuzzy logic dengan input 10 meter dalam 10 detik
Gambar 14. Pengujian fuzzy logic dengan input 12 meter dalam 12 detik
10
Dari pengujian fuzzy logic yangdilakukan penulis selama lima kali percobaan didapatkan hasil bahwa rpm yang dihasilkan oleh sistem hampir mendekati nilai yang diharapkan. Hal ini dikarenakan kurang sempurnanya dalam pencarian rule set.
4.4 Pengujian Sistem Keseluruhan
Dari pengujian yang dilakukan didapatkan hasil sebagai berikut :
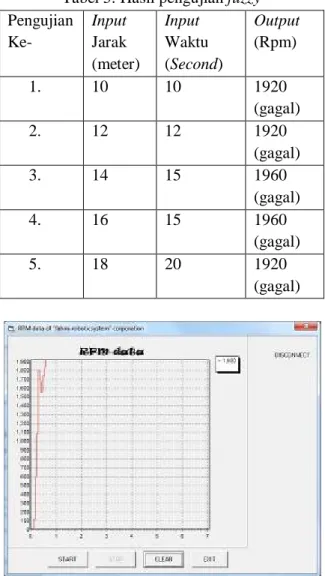
Tabel 5. Hasil pengujian fuzzy Pengujian Ke- Input Jarak (meter) Input Waktu (Second) Output (Rpm) 1. 10 10 1920 (gagal) 2. 12 12 1920 (gagal) 3. 14 15 1960 (gagal) 4. 16 15 1960 (gagal) 5. 18 20 1920 (gagal)
Gambar 15. Pengujian sistem keseluruhan
Gambar 16.Pengujian sistem keseluruhan
Dalam pengujian sistem keseluruhan dilakukan dengan menggabungkan kedua metode yakni metode fuzzy logic dan metode kontrol PID. Dalam pengujian penulis mengalami kegagalan dalam mendapatkan output yang sesuai yang diharapkan. Hal ini dikarenakan sistem kontrol PID yang dijalankan oleh ATmega 8 sebagai mikro Slave tidak dapat mengolah data yang diterima dari metode fuzzy logic yang dijalankan oleh mikro Master Atmega 16.
V PENUTUP
Berdasarkan pengujian pada perangkat keras dan perangkat lunak yang dipergunakan dalam tugas akhir ini, maka dapat diambil kesimpulan dan saran-saran dari hasil yang diperoleh.
5.1. Kesimpulan
Setelah melakukan penelitian ini, penulis mengambil kesimpulan sebagai berikut:
1. Dalam perancangan fuzzy logic dapat disimpulkan bahwa pengujian yang dilakukan dapat berjalan sesuai dengan waktu dan jarak tempuh yang telah ditentukan.
2. Dalam perancangan kontrol PID (Proporsional Integral Derivative) dapat disimpulkan dalam bahwa pengujian yang
11
dilakukan, motor kanan dan motor kiridapat memenuhi setpoint yang telah ditentukan oleh user.
3. Dalam pengujian PID antara motor kanan dan motor kiri, responstime motor kanan sedikit berbeda, sehingga pada saat uji coba pertama kali start robot akan berbelok ke kiri. Hal ini dikarenakan karakteristik setiap motor berbeda-beda.
4. Hasil pengujian sistem keseluruhan didapatkan dengan menggabungkan dua metode yaitu metode fuzzy logic dan metode kontrol PID. Dan dalam pengujian yang dilakukan oleh penulis masih mengalami kegagalan, yang dikarenakan oleh sistem dari metode kontrol PID tidak dapat mengolah masukan dari metode fuzzy logic yang berupa setpoint.
5.2. Saran
Sebagai pengembangan dari penelitian yang telah dilakukan, penulis memberikan saran sebagai berikut:
1. Kedepannya dalam pengontrolan motor DC menggunakan metode kontrol PID lebih diperhatikan dalam pemilihan motor DC yang hampir sama, sehingga tidak terjadi keunggulan responstime antara motor DC satu dengan yang lainnya.
2. Dalam pencarian konstanta kp, ki, dan kd
lebih disarankan menggunakan metode tuning yang telah ada bukan trial error, sehingga hasil yang didapatkan bisa lebih baik dan proses pencariannya lebih singkat. 3. Penyempurnaan program logika fuzzy yang
lebih ditekankan pada pencarian rule set. Metode yang digunakan saat ini adalah trial error. Diharapkan kedepannya dapat ditemukan metode pencarian rule set yang sampai saat ini belum ditemukan oleh penulis.
DAFTAR RUJUKAN
ATMEL Corporation. 2011. ATMEGA16. (Online).
(http://www.alldatasheet.com/datasheet
pdf/pdf/78532/ATMEL/ATMEGA 32.html ) , diakses 29 Agustus 2012.
Braunl, Thomas. 2006. Embedded Robotics Second Edition. Perth, WA: Australia.
Saputra, Riza Rahardian, 2010. “Perancangan Dan Pembuatanprototipe Senjata Pertahanan Menggunakan Teknologi Coilgun”. Surabaya, Sekolah Tinggi Manajemen Informatika Dan Teknik Komputer Surabaya.
Sri Kusumadewi, Hari Purnomo, 2010. “Aplikasi Logika Fuzzy Untuk Pendukung Keputusan,edisi 2” .Yogyakarta, Graha Ilmu.