1
NASKAH PUBLIKASI
KARYA ILMIAH
Analisis Kinematis Lengan Excavator
Keihatsu 921 C
Disusun Untuk Memenuhi Tugas dan Syarat - Syarat Guna Memperoleh Gelar Sarjan Teknik (S1) Jurusan Teknik Mesin Fakultas Teknik
Universitas Muhammadiyah Surakarta
Disusun Oleh :
DEVI YULIANTO
D 200 090 051
JURUSAN TEKNIK MESIN FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH SURAKARTA
HALAMAN PENGESAHAN
Naskah publikasi
ini
berjudul "Analisis Kinematis
Lengan
Excavator 921
C"
telah
disritujui
pembimbing
dan
disahkan
Ketua Jurusansebagai syarat
untukmemperoleh
gelarsariana
S-1
teknik
mesin diJurusan
Mesin FakultasTeknik
Universitas Muhammadiyah Surakarta.Disusun oleh:
Nama
:Devi
Yulianto
NIM
: D 200 09005{
Pembimbing
PendampingWiiianto.
S.T..M.Eno.Sc
3
Analisis Kinematis Lengan Excavator
Keihatsu 921 C
Devi Yulianto, Wijianto, S.T., M.Eng.Sc. Amin Sulistyo, S.T.
Teknik Mesin Universitas Muhammadiyah Surakarta
Jl. Ahmad Yani Tromol Pos 1 Pabelan, Kartasura
Email:
deviyulianto63@gmail.com
ABSTRAKSI
Tujuan penulisan tugas akhir ini adalah analisis kinematis
pada excavator, yaitu pada excavator produk keihatsu 921 C. Analisis
kinematis dimaksud untuk mengetahui posisi dan kecepatan pada setiap
link pada posisi tertentu.
analisis kinematis yang dilakukan adalah pada perhitungan posisi
dan kecepatan sesaat boom, arm dan backet. Analisi dilakukan
sepanjang workspace area mekanisme lengan excavator berbagai titik
pada mekanisme lengan excavator pada satu arah putaran. Analisis yang
dilakukan adalah pada gerak umum dua dimensi yang dimiliki oleh
mekanisme lengan excavator.
Hasil analisis kinematis didapatkan hasil bahwa analisis kinematis
diberbagai posisi dari silinder boom memendek secara maksimal sampai
memanjang secara maksimal pada workspacearea didapatkan kecepatan
sudut boom terendah dicapai pada saat silinder boom pada posisi sudut
θ
1= 42,75
odan kecepatan tertinggi sudut boom dicapai pada saat silinder
boom pada posisi θ
1= 137,75
o. Dan pada arm didapatkan kecepatan
sudut arm terendah dicapai pada saat silinder arm pada posisi sudut θ
3=
70
odan kecepatan tertinggi sudut arm dicapai pada saat silinder arm pada
posisi θ
3= 140
o. Dan untuk bucket didapatkan kecepatan sudut bucket
terendah dicapai pada saat silinder Bucket pada posisi sudut θ
5= 30
odan kecepatan tertinggi sudut bucket dicapai pada saat silinder bucket
pada posisi θ
5= 130
o.
4
A. PENDAHULUAN 1. LATAR BELAKANG
Pada era globalisasi sekarang ini, dapat dirasakan adanya suatu perkembangan yang pesat dalam bidang Ilmu Pengetahuan dan Teknologi. Indonesia dalam hal ini sebagai negara yang berkembang maka dituntut untuk lebih produktif dalam melaksanakan pembangunan. Dalam melaksanakan proyek-proyek yang besar seperti pembangunan jalan-jalan tol, gedung pencakar langit, bandara udara dan lain-lain. Diperlukanlah sarana atau sebuah alat yang dapat melakukan pekerjaan berat. Alat-alat berat tersebut digunakan untuk penggalian, pengangkutan, perataan dan lain-lain dengan waktu yang singkat, sehingga dalam pengerjaan proyek tersebut dapat dipercepat. Maka banyak diciptakan alat-alat berat, salah satunya alat berat yang digunakan untuk menggali disebut excavator.
Exavator mempunyai banyak jenis dan pada umumnya excavator digunakan untuk menggali, pengangkutan dan pemindahan. Maka perlu ketelitian dalam pembuatan alat tersebut.
Dalam kontruksi permesinan, dituntut analisis dalam bidang mekanika, salah satunya adalah analisis kinematis. Analisis kinematis sangatlah penting dalam perencanaan struktur-struktur yang bergerak.
Kinematika sebagai bagian dari ilmu-ilmu teknik dapat digunakan sebagai dasar analis dalam persoalan perencanaan teknik. Mahasiswa teknik pada khususnya sebagai investasi bagi perkembangan teknologi kedepan yang telah memperoleh pelajaran mengenai ilmu teknik salah satunya ilmu kinematika diharapkan mampu mengembangkannya, sehingga mampu mengembangkan ilmu dan teknologi, salah satu metode untuk melakukan pengembangan adalah dengan analisa pada sebuah kasus tertentu.
Dari latar belakang diatas dalam tugas akhir kali ini akan dibahas tentang analisis kinematis pada exavator. Yaitu pada excavator produk keihatsu 921 C. Analisis kinematis dimaksud untuk mengetahui posisi dan kecepatan pada setiap link pada posisi tertentu.
2. TUJUAN PENULISAN
Tujuan dalam penulisan tugas akhir ini ini adalah :
1. Untuk mengetahui perhitungan analisis kinematis pada mekanisme lengan excavator pada posisi tertentu .
2. Untuk mengetahui perhitungan analisis kinematis pada banyak posisi sepanjang workspace area dari mekanisme boom, arm dan bucket dengan menggunakan pemrograman komputer.
B. TINJAUAN PUSTAKA 1. TINJAUAN UMUM
Excavator adalah suatu peralatan kontruksi alat berat yang memiliki fungsi untuk melakukan pekerjaan seperti penggalian tanah, pengumpulan tanah,
5
memindahkan dan mengangkut tanah serta mengangkat barang. Tergantung attacment yang di pasang pada excavator. Attacment ada beberapa macam antara lain : backhoe, shovel, dragline, chamsel dan lain-lain. Sistem pengandaliannya dibedakan menjadi dua macam yaitu : sistem kabel (cable system) dan sistem hidrolik (hydroulic system).
Peralatan excavator dalam aplikasinya digunakan antara lain untuk pembangunan jalan raya, membuat saluran irigasi pertanian, membangun bendungan, membangun jembatan, membuka lahan pemukiman baru dan lain-lain. Dalam penulisan tugas akhir ini disajikan hydraulic excavator backhoe. Kontruksi dari hydrulic excavator backhoe terdiri dari mesin sebagai penggerak utama, pompa hidrolik sebagai penggerak utama seluruh silinder hidrolik, silinder hidrolik sebagai penggerak undercarriage serta work equipment (attacment).dan undercarriage serta lengan excavator backhoe. (work equipment). Namun demikian yang akan disajikan dalam tugas akhir ini hanya bagian lengannya saja.
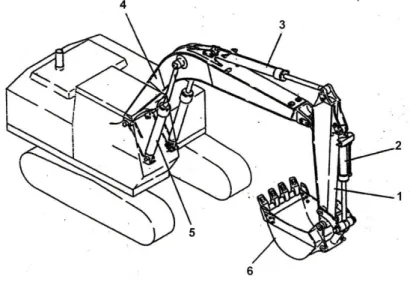
Keterangan : 1. arm
2. Silinder Hidrolik Bucket 3. Silinder Hidrolik arm 4. Boom
5. Silinder Hidrolik Boom 6. Bucket
Gambar Mekanisme Lengan Excavator Backhoe a. Mekanisme Boom
Mekanisme boom adalah bagian dari mekanisme lengan excavator yang memiliki kontruksi paling besar. Mekanisme boom terdiri dari batang boom dan pengendali boom berupa dua buah silinder hidrolik. Dalam melakukan kerjanya silinder hidrolik menerima daya dari pompa hidrolik, sehingga mekanisme boom berfungsi untuk meneruskan daya yang diberikan oleh pompa hidrolik. Daya
6
yang di terima dari pompa hidrolik digunakan untuk menempatkan posisi arm dan bucket dan batang boom itu sendiri pada posisi kerja yang diinginkan. Gerak yang mampu dilakukan oleh batang boom hanya sebatas gerak rotasi pada sumbu putarnya, sedangkan silinder hidrolik bergerak secara translasi. Dengan demikian maka gerak yang dimiliki oleh mekanisme boom adalah gerak bidang umum. Adapun kontruksi dari mekanisme boom adalah sebagai berikut :
b. Mekanisme Arm
Mekanisme arm terdiri dari sebuah batang arm dan pengendalinya sebuah silinder hidrolik. Batang arm dipasang pada ujung batang boom lalu dihubungkan dengan batang arm. Mekanisme arm berfungsi untuk mengatur mekanisme bucket pada posisi yang dikehendaki. Posisi mekanisme arm sangat tergantung terhadap posisi mekanisme boom. Jika mekanisme boom berubah posisi maka secara otomatis posisi mekanisme arm juga berubah posisi. Gerak yang dimiliki oleh mekanisme arm adalah gerak bidang umum, jadi seperti gerak yang dimiliki mekanise boom, karena batang boom bergerak secara rotasi dan silinder hidrolik bergerak secara translasi. Adapun konstruksi batang arm dibedakan menjadi dua macam yaitu :
c. Mekanisme Bucket
Mekanisme dapat didekati sebagai sebagai mekanisme empat batang atau fourbar linkage dengan silider hidrolik sebagai penggeraknya. Dengan demikian maka mekanisme bucket terdiri dari sebuah silinder hidrolik dan mekanisme empat batang serta bucket itu sendiri. Bucket memiliki fungsi untuk melakukan kerja-kerja penggalian dan membawa hasil galian untuk dipindahkan. Mekanisme bucket adalah mekanisme yang letaknya paling ujung dari mekanisme lengan evcavator bakchoe. Gerak pada mekanisme bucket juga
merupakan gerak bidang umum
.
2. DASAR TEORI
a. Konsep Dasar Kinematika
Kinematika adalah cabang ilmu yang mempelajari tentang gerak suatu partikel atau benda tanpa memandang gaya yang bekerja pada partikel atau benda tersebut. Kinematika benda tegar adalah salah satu yang dipelajari dalam kinematika. Benda tegar didifinisikan sebagai sistem partikel-partikel yang jarak anatara partikelnya tetap/tidak berubah. Jadi bila masing-masing partikel tersebut dinyatakan dalam sebuah vektor posisi dari sumbu-sumbu acuan yang diletakkan pada benda dan berputar bersama benda tersebut, maka tidak akan terjadi perubahan pada vektor posisi tersebut. Gerak bidang pada bidang tegar ada tiga macam yaitu :
1. Gerak translasi
Didefinisikan sebagai gerakan yang setiap garis pada benda tersebut tetap sejajar terhadap kedudukan awalnya pada setiap saat. Pada gerak translasi
7
rektilinier semua titik pada benda bergerak menurut garis lurus yang sejajar, sedangkan pada gerak translasi kurvilinier semua titik bergerak pada garis lengkung yang sama dan sebangun.
2. Gerak rotasi pada sumbu tetap
Bila sebuah benda tegar bergerak mengelilingi sumbu yang tetap, maka semua partikel yang terletak pada benda kecuali partikel yang terletak pada sebuah putaran, bergerak sepanjang lintasan lingkaran. Gerak rotasi pada sumbu tetap adalah gerakan sudut terhadap sumbunya.
3. Gerak bidang umum
Bila sebuah benda tegar mengalami kombinasi dari gerak rotasi dan gerak translasi, maka benda tersebut memiliki gerak bidang umum.
b. Persamaan Analisis Kinematis
Dalam analisis kinematis yang akan disajikan pada tugas akhir ini adalah termasuk jenis gerak bidang umum yang merupakan kombinasi gerak translasi silinder hidrolik dan gerak rotasi batang boom, arm dan bucket.
Salah satu cara untuk mendifinisikan gerakan ini adalah dengan menggunakan koordiasi pusat s untuk menyatakan lokasi titik sepanjang lintasan dan koordinat posisi sudut untuk menyatakan orientasi garis/benda. Kedua koordinat tersebut kemudian dihubungkan secara geometri. Dengan menerepkan deferensial terhadap waktu, persamaan geometri tersebut akan diperoleh v = ds/dt, α = dv/dt, ω = dθ/dt, α = dω/dt sehingga gerakan titik translasi dan gerakan sudut suatu batang atau garis dapat dihubungkan.
Gerak sudut
Gerak rotasi pada sumbu tetap pada sebuah benda tegar dinyatakan oleh gerakan sudutnya. Hanya garis-garis atau benda saja yang mengalami gerakan sudut. Perubahan sudut sering kali diukur dengan gerakan diferensial dθ dan dinamakan perpindahan sudut. Vektor ini memiliki besar dθ yang bisa diukur delam derajat. Radian atau putaran (1 putaran = 2π radian). Gerakan ini selalu terhadap sumbu tetap, sehingga dθ selalu sepanjang sumbu tersebut.
Kecepatan sudut
Laju perubahan sudut terhadap waktu disebut kecepatan sudut (ω). Karena dθ terjadi dalam selang waktu yang sangat singakat, maka :
ω = dθ/dt
Vektor ini sering kali diukur dalam radian per detik (rad/s). Arah rotasi dapat searah ataupun berlawanan dengan arah puraran jarum jam. Disini kita tetapkan nilai positif untuk arah putaran jarum jam (counter clockwise) dan negatif untuk arah searah jarum jam (clockwise).
Rotasi terhadap sumbu tetap menunjukkan sebuah titik yang bergerak/berputar sepanjang lintasan yang berpusat pada suatu titik tertentu. Posisi titik A pada gambar dibawah didefinisiskan oleh vektor R yang ditarik dari titik O ke titk A.komponen vektor R adalah
8
Kecepatan titik A disebut dengan VA. kecepatan adalah laju perubahan jarak terhadap waktu. Untuk gerak rotasi terhadap sumbu tetap, maka berlaku :
V = ω x R
Gambar Posisi, Kecepatan Pada Batang
C. ANALISIS KINEMATIS
a. Analisis Kinematis Mekanisme Boom Data-data yang diketahui :
R0 = 887 mm θ1 = 137,75 o θ1’ = 42,25 o
R1 = 2330 mm β1 = 112,75o
RB = 5680 mm Q = 1600000 mm3/s
RAB = 3702,25 mm DS1 = 125 mm
Asumsi dasar :
Kecepatan silinder boom (VS1) = konstan, sehingga αS1 = 0 Skala 1 cm = 65 mm
9 1. Analisis Posisi Posisi link 1 R1x = R1 cosθ1 = -1725 mm R1y = R1sinθ1 = 1567 mm Posisi link 2 R2x = -Ro - R1x = -2615 mm R2Y = R1Y = 1570 mm R2 =
θ2 = Arcsin
R2 = silinder Boom maka, dari persamaan diatas pada saat θ1 = 137,75o akan
diperoleh sebagai berikut :
R2 = 3050 mm θ2 = 31o Posisi titik B RBx = RB cosβ1 = -2196,5 mm RBy = RB sin β1 = 5238,1mm 2. Analisis Kecepatan Kecepatan di titik A adalah :
Jika VS1 adalah kecepatan silinder boom maka diperoleh :
Dengan menerapkan hukum continuitas maka diperoleh persamaan :
Vs1 =
dimana,
Q : debit aliran fluida silinder hidrolik A : luas penampang silinder hidrolik
10
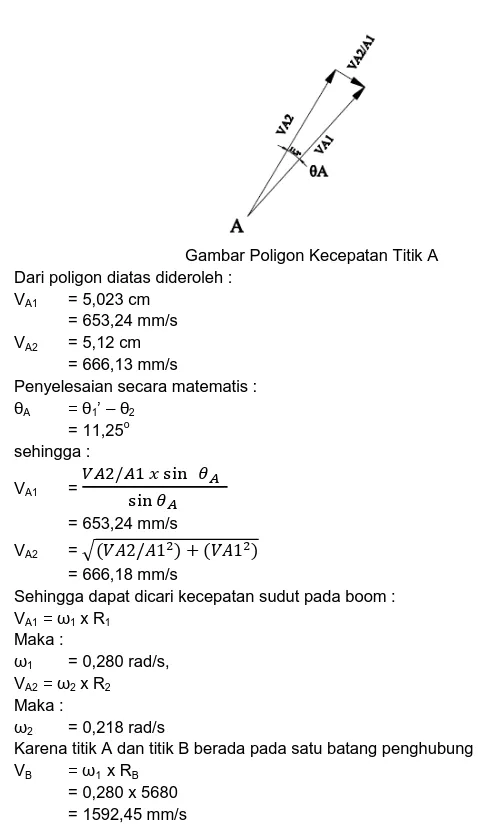
Gambar Poligon Kecepatan Titik A Dari poligon diatas dideroleh :
VA1 = 5,023 cm
= 653,24 mm/s
VA2 = 5,12 cm
= 666,13 mm/s
Penyelesaian secara matematis : θA = θ1’ – θ2 = 11,25o sehingga : VA1 = = 653,24 mm/s VA2 =
= 666,18 mm/s
Sehingga dapat dicari kecepatan sudut pada boom : VA1 = ω1 x R1 Maka : ω1 = 0,280 rad/s, VA2 = ω2 x R2 Maka : ω2 = 0,218 rad/s
Karena titik A dan titik B berada pada satu batang penghubung kaku maka, VB = ω1 x RB
= 0,280 x 5680 = 1592,45 mm/s
b. Analisis Kinematis Mekanisme arm Data-data yang diketahui :
R0 =2999 mm Q = 1600000 mm3/s
R3 = 934 mm DS2 = 135 mm sehingga AS2 = 14300 mm3
11
β2 = -124o β2’ = -140o
θ3’ = 140o REB = BE = 2911 mm
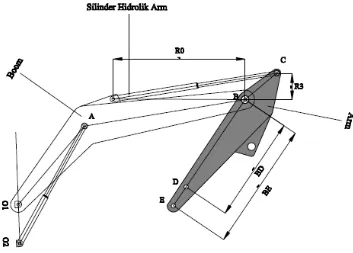
untuk lebih jelasnya maka dapat diperhatikan Gambar 18 dibawah ini. Asumsi dasar bahwa kecepatan silinder arm (VS2) = konstan sehingga α2 = 0
Gambar Posisi Mekanisme Arm
1. Analisis Posisi
Bila arm diputar dengan titik pusat di titik B maka : Posisi link 3 R3x = R3 cosθ3 = 715,49 mm R3y = R3sinθ3 = 600,36 mm Posisi link 4 R4x = Ro + R3x = 3714,49 mm R4y = R3y = 600,39 mm R4 =
= 3752,82 mm θ4 = Arcsin = 9,2 o posisi titik D RDBx = RDB cosβ2 = -1340 mm RDBy = RDB sinβ2 = -1987 mm Posisi titik E
12 REBx = REB cosβ2 = -1628 mm REBy = REB sinβ2 = -2413 mm 2. Analisis kecepatan Kecepatan di titik C adalah :
Jika VS2 adalah kecepatan silinder arm maka diperoleh :
Dengan menerapkan hukum continuitas maka diperoleh persamaan :
Vs2 =
dimana,
Q : debit aliran fluida silinder hidrolik A : luas penampang silinder hidrolik
Vs2 = 112 mm/s
Gambar. Poligon Kecepatan Titik C Dari poligon diatas dideroleh :
VC3 = 5,468 cm
= 218.72 mm/s
VC4 = 4,697 cm
= 187,89 mm/s
Penyelesaian secara matematis θA = θ3 – θ4 = 30,8 o θA = 30,8o sehingga : VC3 = = 218.72 mm/s
13
VC4 =
= 187,89 mm/s
Sehingga dapat dicari kecepatan sudut pada arm : VC3 = ω3 x R3 Maka : ω3 = 0,234 rad/s VC4 = ω4 x R4, Maka : ω4 = 0,051 rad/s
Karena titik D dan titik E berada pada satu batang penghubung kaku maka, Kecepatan titik D adalah :
VD = ω3 x RD
= 560.89 mm/s Kecepatan titik E adalah :
VE = ω3 x RE
= 681,174 mm/s
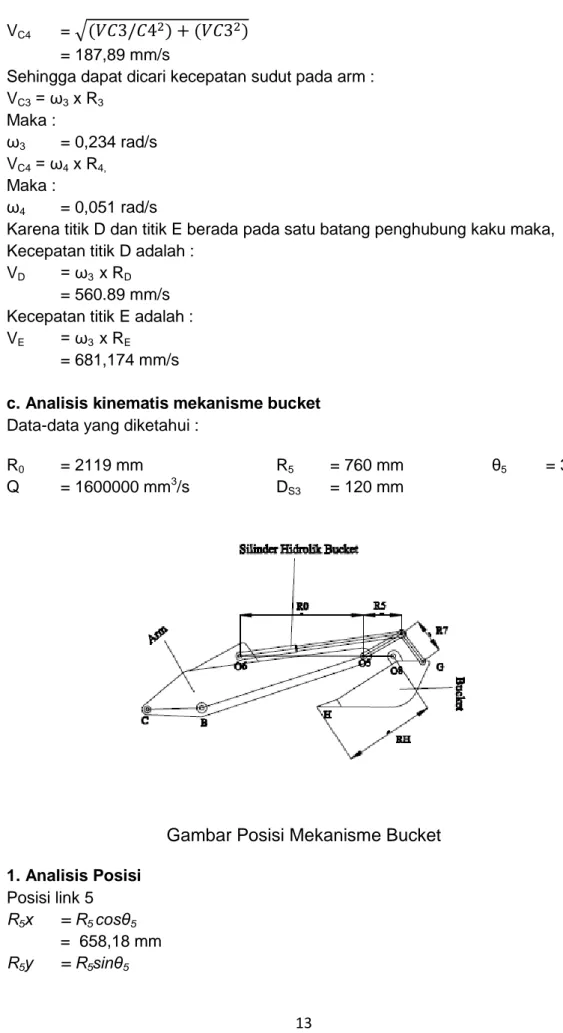
c. Analisis kinematis mekanisme bucket Data-data yang diketahui :
R0 = 2119 mm R5 = 760 mm θ5 = 30o
Q = 1600000 mm3/s DS3 = 120 mm
Gambar Posisi Mekanisme Bucket
1. Analisis Posisi Posisi link 5
R5x = R5 cosθ5
= 658,18 mm
14 = 380 mm Posisi link 6 R6x = R0 + R5x = 2777,18 mm R6y = R5y = 380 mm R6 =
= 2803,06 mm θ6 = Arcsin = 7,8 o Skala 1 cm = 400 mm
Gambar Four-bar Linkage Mekanisme Bucket Data-data yang diketahui :
R8 = 580 mm RH = O3 = 153 mm θ8 = -10o R9 = 450 mm R7 = 620 mm θ9 = -145o RB =
= 433,288 mm Sin θB = = 0,877 mm Cos θB =
15 = 0,481 mm θB = 2Arctan = 61,28o θA = arcos = 116,03 o θ7 = θB – θA = -57,48o R7x = R7 cosθ7 =333,31 mm R7y = R7 sinθ7 =-522,78 mm R8x = -(R9x+R5x+R7x) = -541,49 mm R8y = -(R9y+R5y+R7y) =- 142,78 mm Cos θ8 = R8x/R8 = -0,9969 mm Sin θ8 = R8y/R8 = 0,255 mm Maka : θ8 = 2Artan = 165,29o θ9 = θ8 + 57,47 = 222,76o RHx = RH cosθ9 = - 1124,5 mm RHy = RH sinθ9 = - 1037,4 mm 2. Analisis Kecepatan Kecepatan di titik F adalah :
Jika VS3 adalah kecepatan silinder bucket maka diperoleh :
Dengan menerapkan hukum continuitas maka diperoleh persamaan :
16
dimana,
Q : debit aliran fluida silinder hidrolik A : luas penampang silinder hidrolik
Vs3 =
= 141,54 mm/s
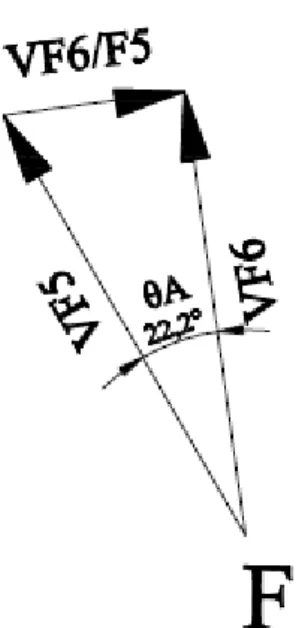
Gambar Poligon kecepatan titik F Dari poligon diatas dideroleh :
VF5 = 6,69 cm
= 374,6 mm/s
VF6 = 6,19 cm
= 346,83 mm/s
Penyelesaian secara matematis θA = θ5 – θ6 = 22,2 o sehingga : VF5 = = 374,6 mm/s VF6 =
= 346,83 mm/s
Sehingga dapat dicari kecepatan sudut pada bucket : VF5 = ω5 x R5
Maka :
ω5 = 0,493 rad/s
17
Maka :
ω6 = 0,124 rad/s
Kecepatan sudut link 7 dan 8 :
ω7 = = 0,62716 rad/s ω8 = = 0,98495 rad/s
Maka kecepatan relatif titik G terhadap titik F adalah
VFG = ω7 x R7
= 388,84 mm/s
Dan kecepatan titik G adalah :
VG = ω8 x R8
= 551,57 mm/s Kecepatan titik H adalah :
VH = ω8 x RH
= 1507 mm/s
D. ANALISIS PENGERJAAN KOMPUTER MATLAB
a. perbandingan kecepatan mekanisme boom pada berbagai posisi
Grafik Kecepatan boom pada berbagai posisi Keterangan :
18
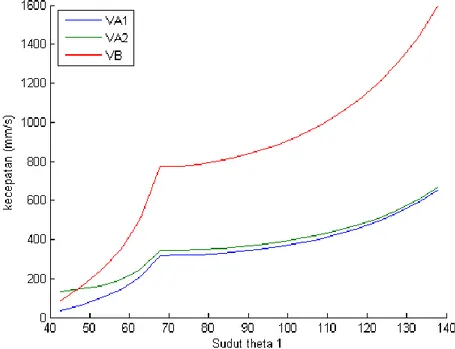
Dari grafik 01 menunjukan grafik perbandingan kecepatan pada mekanisme boom pada berbagai posisi dari posisi silinder boom memendek maksimal sampai memanjang maksimal. Dari grafik diatas menunjukkan kecepatan boom pada beberapa titik link di mekanisme boom.
Kecepatan VA1 adalah kecepatan boom pada titik A terhadap O1 ,
kecepatan VA2 adalah kecepatan boom pada titik A terhadap titik O2 dan
kecepatan VB adalah kecepatan titik B terhadap titik O1.
Dengan pemrogaman komputer matlab telah diperoleh kecepatan pada titik VA1,VA2 dan VB pada berbagai posisi. Dari grafik diatas dapat diketahui kecepatan
titik VA1,VA2 dan VB, kecepatan terendah ketika pada saat silinder boom pada
posisi sudut 42,75o dengan nilai VA1 : 35,519 mm/s, VA2 : 135,195 mm/s dan VB :
86,58 mm/s, dan mengalami pernambahan kecepatan hingga pada posisi sudut 62,75o dengan interval kecepatan yang sangat tinggi, setelah pada posisi sudut 62,75 sampai 77,75o dengan interval keceptan rendah, setelah pada posisi sudut 77,75 mengalami kecepatan dengan interval sangat tinggi hingga mencapai kecepatan maksimum pada posisi sudut 137,75o dengan nilai VA1 : 653,241, VA2 :
666,138 dan VB : 1592,45..
b. perbandingan kecepatan mekanisme Arm pada berbagai posisi
Grafik 02. Keceatan arm pada berbagai posisi
19
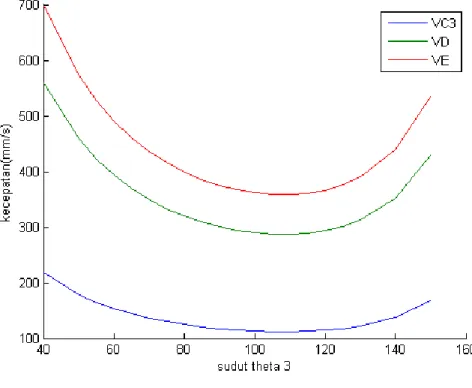
Dari grafik 02 menunjukan grafik perbandingan kecepatan pada mekanisme arm pada berbagai posisi dari posisi silinder arm memendek maksimal sampai memanjang maksimal. Dari grafik diatas dapat dilihat kecepatan boom pada beberapa titik link di mekanisme boom.
Kecepatan VC3 adalah kecepatan arm pada titik C terhadap titik A ,
kecepatan VD adalah kecepatan arm pada titik D terhadap titik B dan kecepatan
VE adalah kecepatan titik E terhadap titik B.
Dengan pemrogaman komputer matlab telah diperoleh kecepatan pada titik VC3,VD dan VE pada berbagai posisi. Dari grafik diatas dapat diketahui kecepatan
titik VC3,VD dan VE, kecepatan tertinggi ketika pada saat silinder arm pada posisi
sudut 140o dengan nilai VC3 : 218,292 mm/s, VD : 560,622 mm/s dan VE : 699,043
mm/s, dan mengalami penurunan kecepatan hingga pada posisi sudut 70o dengan nilai VC3 : 111,896 mm/s, VD : 287,167 mm/s dan VE : 358,329 mm/s,
kemudian setelah posisi sudut 70o mengalami penambahan kecepatan hingga pada posisi sudut 30o dengan nilai VC3 : 167,017 mm/s, VD : 287,167 mm/s dan VE
: 854,49 mm/s.
.
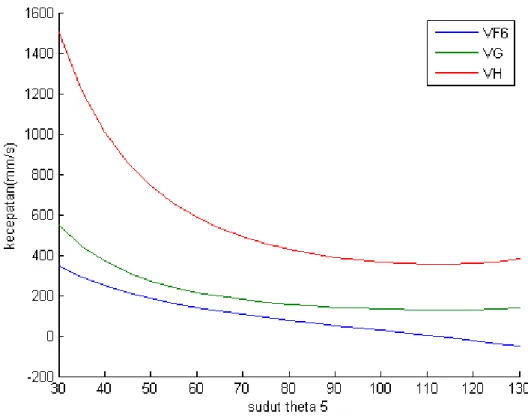
c. perbandingan kecepatan mekanisme bucket pada berbagai posisi
Grafik 03. Kecepatan bucket pada berbagai posisi
20
Dari grafik 03 menunjukan grafik perbandingan kecepatan pada mekanisme bucket pada berbagai posisi dari posisi silinder bucket memendek maksimal sampai memanjang maksimal. Dari grafik diatas dapat dilihat kecepatan bucket pada beberapa titik link di mekanisme buckrt.
Kecepatan VF6 adalah kecepatan bucket pada titik F terhadap titik O5 ,
kecepatan VG adalah kecepatan bucket pada titik G terhadap titik O8 dan
kecepatan VH adalah kecepatan titik H terhadap titik O8.
Dengan pemrogaman komputer matlab telah diperoleh kecepatan pada titik VF6,VG dan VH pada berbagai posisi. Dari grafik diatas dapat diketahui kecepatan
titik VF6,VG dan VH, kecepatan tertinggi ketika pada saat silinder bucket pada
posisi sudut 30o dengan nilai VF6 : 346,691 mm/s, VG : 551,573 mm/s dan VH :
1506,98 mm/s, dan mengalami penurunan kecepatan hingga kecepatan terendah dari silinder bucket pada titik VF6 yaitu pada posisi sudut 130o dengan
nilai VF6 : -52,49 mm/s, pada titik VG dan VH pada posisi sudut 110o, dengan nilai
VG : 129,45 mm/s dan VH : 353,67 mm/s, kemudian mengalami penambahan
kecepan hingga pada posisi sudut 130o, dengan nilai VG : 140,101 mm/s dan VH :
382,54 mm/s E. PENUTUP KESIMPULAN
Dari analisa kinematis lengan exavator keihatsu 921 C pada posisi tertentu dan berbagai posisi di setiap link maka dapat dipeoleh kesimpulan sebagai berikut :
1. Analisis kinematis diberbagai posisi dari silinder boom memendek secara maksimal sampai memanjang secara maksimal didapatkan kecepatan sudut boom terendah dicapai pada saat silinder boom pada posisi sudut θ1 = 42,75o dan kecepatan tertinggi sudut boom
dicapai pada saat silinder boom pada posisi θ1 = 137,75o.
2. Analisis kinematis diberbagai posisi dari silinder arm memendek secara maksimal sampai memanjang secara maksimal didapatkan kecepatan sudut arm terendah dicapai pada saat silinder arm pada posisi sudut θ3 = 70o dan kecepatan tertinggi sudut arm dicapai pada
saat silinder arm pada posisi θ3 = 140o..
3. Analisis kinematis diberbagai posisi dari silinder bucket memendek secara maksimal sampai memanjang secara maksimal didapatkan kecepatan sudut bucket terendah dicapai pada saat silinder bucket pada posisi sudut θ5 = 30o dan kecepatan tertinggi sudut bucket
dicapai pada saat silinder boom pada posisi θ5 = 130o.
Saran
Saran-saran dalam melakukan analisis kinematis pada lengan exavator
21
1. Agar analisi bisa akurat harus benar-benar memahami mekanisme pada unit excavator. Diharapkan bisa mengumpulkan data dari shop manual atau meninjau unitnya secara langsung.
2. Dalam melakukan analisis diharapkan melukan studi pustaka agar memahami dasar-dasar teori yang diperlukan dalam analisis tersebut. 3. Diharapkan dengan adanya penulisan dari pada analisis kinematis
ini, semoga dapat menjadikan acuan atau dasar pemikir guna untuk perbandingan dengan alat-alat berat yang ada dilapangan.
4. Diharapkan untuk operator keihatsu 921 C, dalam melakukan pengerjaan mengangkat dan memindahkan agar lebih efektif dan efisien maka pada posisi lengan exavator silnder hidrolik boom memanjang secara maksimal, sinder arm memanjang maksimal dan sinder hidrolik bucket memanjang maksimal.
22
DAFTAR PUSTAKA
Holowenko, A.R, Cendy Prapto ; 1993 ; Dinamika Permesinan. Erlangga: Jakarta
E.Wilson, Charles, J Peter Sedler ; 1983 ; Kinematics and Dynemics of Mechinery , Harper and Row: Newyork
Hanselman, Duane and Bruce litlefield ; 2000 ; MATLAB : Bahasa Komputasi Teknik, ANDI: Yogyakarta
Keihatsu Ltd ; Shop Manual Keihatsu 921 C, Japan
Popov, E.P ; 1996 ; Mekanika Teknik, Alih Bahasa : Zainbal Astaman Tanisan, M.Sc, Edisi Kedua (Versi S1), Erlangga: Jakarta
P. Beer, Ferdinan, Russel Jonson J.R ; 1977 ; Vektor Mechanics for Engineer ; Statics and Dinamics, Mc Grow-Hill Book Company: USA
Weston Sear, Francis, Mark W. Semansky ; 1991 ; Fisika Untuk Universita I, Bina Cipta: Jakarta
Mariam, J.L, L.G Kraige ; 1993 ; Mekanika Teknik Jilid 2 ; Erlangga: Jakarta Victor, I, Steeter E, Benjamin Wilie ; 1990 ; Mekanika Fluida Jilid 1, Erlangga: