BERBASIS KONTROLER LOGIKA FUZZY
DENGAN MIKROKONTROLER ATMEGA32
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Fakultas Sains dan Teknologi
Disusun oleh :
Willi
045114046
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2008
CONTROLLER BASED ON FUZZY LOGIC
USING ATMEGA32 MICORCONROLLER
Presented For Fulfilling One Of The Requirement To Obtain Engineer
Degree In Electrical Engineering Of Science And Technology Faculty
Sanata Dharma University
by :
Willi
045114046
ELECTRICAL ENGINEERING
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2008
v
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis
ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah
disebutkan dalam daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 1 Desember 2008
Penulis
GUNAKANLAH SEGENAP KEMAMPUANMU
DEMI MENGEJAR CITA-CITA YANG KAMU
IMPIKAN
Kupersembahkan Tugas Akhir Ini Untuk :
Tuhan yang Maha Mulia
Ayah dan Ibuku tercinta
Saudara-saudaraku yang terbaik
Dosen-dosen yang membimbingku
Dan teman-teman yang selalu mendukungku
paling panas ataupun suhu air paling dingin yang dapat dicapai. Hal ini
menyebabkan pemakai kadang-kadang harus mencampur air panas dan dingin
untuk mendapatkan air yang hangat ataupun tidak terlalu dingin.
Pada perancangan tugas akhir ini, penulis merancang suatu dispenser yang
memiliki berberapa pilihan tingkatan panas dan dingin air bagi pemakai agar
memiliki lebih banyak alternatif pilihan sesuai keinginan. Pengaturan suhu air
menggunakan kontroler berbasis logika fuzzy menggunakan mikrokontroler
ATMega32 agar suhu air dapat dipertahankan dan stabil. LCD digunakan untuk
menampilkan pilihan yang disediakan bagi pemakai.
Dari hasil pengujian dan analisa alat ini dapat mengendalikan suhu air
dispenser panas dan dingin dengan tingkat kesalahan (steady state error) kurang
dari 5%.
Kata Kunci : dispenser, mikrokontroler ATMega32, Kontroler Logika Fuzzy
temperature that can be reached options. This caused user sometimes has to mix
the hot water and cold water to get warm water or cool water.
In this final project designing, the writer design a dispenser that has
several hot and cold water level options for user so that user has more alternative
options that match their desire. The water temperature controlling uses fuzzy logic
controller based with AT Mega 32 microcontroller so that the water temperature
can be maintained and stable. LCD is used for showing the choices that available
for user.
From the test result and analyze, this devices can control water dispenser
hot and cold temperature with error rate (steady state error) less than 5%.
Keywords : dispenser, microcontroller ATMega32, Fuzzy Logic Controller
Nama
: Willi
Nomor Mahasiswa : 045114046
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul :
PENGENDALI SUHU AIR DISPENSER BERBASIS KONTROLER
LOGIKA FUZZY DENGAN MIKROKONTROLER ATMEGA32
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan
kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan,
mengalihkan dalam bentuk media lain, mengelolanya di Internet atau media lain
untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun
memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai
penulis.
Demikian pernyatan ini yang saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal : 18 Desember 2008
Yang menyatakan
ix
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas
berkat dan rahmat-Nya sehingga penulis dapat menyelesaikan karya tulis berjudul
“Pengendali Suhu Air Dispenser Berbasis Kontroler Logika Fuzzy Dengan
Mikrokontroler ATMega32”.
Karya tulis ini merupakan salah satu syarat untuk memperoleh gelar
Sarjana Teknik pada Program Studi Teknik Elektro Universitas Sanata Dharma.
Penulisan skripsi ini didasarkan pada hasil-hasil yang penulis dapatkan selama
tahap perancangan, pembuatan dan pengujian alat.
Penulisan skripsi ini tidak terlepas dari bantuan berbagai pihak. Untuk itu,
penulis mengucapkan terima kasih kepada:
1.
Kedua orang tua penulis yang telah memberikan semangat dan doa yang
tak pernah putus sehingga penulis dapat menyelesaikan tugas akhir ini.
2.
Ibu B. Wuri Harini, S.T., M.T., selaku dosen pembimbing I karya tulis
yang telah meluangkan waktu, tenaga, dan pikirannya untuk membimbing
penulis.
3.
Bapak Ir. Tjendro, selaku dosen pembimbing II karya tulis yang telah
meluangkan waktu, tenaga, dan pikirannya untuk membimbing penulis.
4.
Bapak Yosef Agung Cahyanta, S.T., M.T. selaku Wakil I Dekan Fakultas
Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
5.
Sahabat-sahabat baikku yang selalu mendukung : Herfianton, Oksianus,
x
7.
Segenap dosen dan laboran Teknik Elektro Universitas Sanata Dharma.
8.
Segenap karyawan sekretariat Fakultas Sains dan Teknologi.
9.
Teman-teman mahasiswa jurusan Teknik Elektro dan semua pihak yang
tidak dapat disebutkan satu persatu atas setiap bantuannya.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari
penulisan karya tulis ini. Oleh karena itu segala kritik dan saran yang bersifat
membangun sangat penulis harapkan.
Akhir kata, semoga skripsi ini berguna bagi semua pihak dan dapat
menjadi bahan kajian lebih lanjut.
Yogyakarta, 17 Desember 2008
Penulis
HALAMAN JUDUL... i
HALAMAN JUDUL DALAM BAHASA INGGRIS……….. ii
LEMBAR PENGESAHAN PEMBIMBING... iii
LEMBAR PENGESAHAN PENGUJI... iv
LEMBAR PERNYATAAN KEASLIAN KARYA... v
MOTTO DAN PERSEMBAHAN... vi
INTISARI... vii
ABSTRACT………. viii
KATA PENGANTAR... ix
DAFTAR ISI... xi
DAFTAR GAMBAR... xvi
DAFTAR TABEL...
xxi
DAFTAR LAMPIRAN...
xxiii
BAB I. PENDAHULUAN ...
1
1.1
Judul ... 1
1.2
Latar Belakang Masalah……….... 1
1.3
Tujuan dan Manfaat ... 3
1.4
Batasan Masalah ... 3
1.5
Metodologi Penelitian... 4
2.1
Mikrokontroler ATMega32... 6
2.1.1.
Gambaran Umum………
6
2.1.2.
Memori………... 8
2.1.3.
Port Input/Output……….... 10
2.1.4.
Timer/Counter……….... 12
2.1.5.
ADC (Analog to Digital Converter)………....…... 14
2.1.5.1
Inisialisasi ADC……….…
14
2.1.5.2
Pembacaan ADC………...
18
2.2
Sistem Kendali Fuzzy……….. 20
2.2.1.
Logika Fuzzy……….. 20
2.2.2.
Himpunan Tegas / Klasik (Crisp/ Classic Set)……….. 20
2.2.3.
Fuzzifikasi (Fuzzification)……….. 21
2.2.4.
Inferensi……….…. 22
2.2.5.
Komposisi………... 22
2.2.6.
Defuzzifikasi (Defuzzification)……….…….. 23
2.2.7.
Logika Fuzzy dalam Teknik Kendali………..
24
2.3
Liquid Crystal Display (LCD)……….
29
2.3.1.
DDRAM (Display Data Random Access Memory)... 30
2.3.2.
CGRAM (Character Generator Random Access Memory)… 30
2.3.3.
CGROM (Character Generator Read Only Memory)……… 30
2.6.1.
Sensor Suhu LM35……….
34
2.6.2.
Sensor Suhu NTC ( Negative Temperature Coefficient )….. 34
2.6.3.
Solid State Relay……… 35
2.6.3.1
TRIAC……….. 36
2.6.3.2
Optoisolator……….. 36
2.6.4.
Penguat Non-Inverting………... 37
2.6.5.
Komparator……… 38
2.6.6.
Darlington……….. 39
2.6.7.
Pembagi Tegangan (Voltage Divider)………... 40
2.7
Tanggapan Transien………
41
BAB III. RANCANGAN PENELITIAN………...
43
3.1
Diagram Blok………..
43
3.2
Perancangan Perangkat Keras (Hardware)………. 47
3.2.1.
Pengkondisi Sinyal……….…
47
3.2.1.1
Untuk Sensor Air Panas………...….
47
3.2.1.2
Untuk Sensor Air Dingin………...……...
48
3.2.2.
Penguat Daya……….
50
3.2.3.
Solid State Relay……… 51
3.2.4.
Antarmuka Mikrokontroler ATMega32 dengan LCD...
52
3.3
Perancangan Perangkat Lunak (Software)……….. 55
3.3.1.
Diagram Alir (Flow Chart) Program Utama……….
55
3.3.2.
Subrutin Inisialisasi Awal………..
56
3.3.3.
Subrutin Tampilan Awal LCD……….…..
57
3.3.4.
Subrutin Tampilan Input LCD………...
58
3.3.5.
Subrutin Cek Input………. 59
3.3.6.
Subrutin ADC………...
60
3.3.7.
Subrutin Fuzzy Logic Control……… 62
3.3.8.
Subrutin Output Data……….
62
3.3.9.
Perancangan Fuzzy Logic Controller……….… 64
BAB IV. HASIL DAN PEMBAHASAN………
69
4.1
Hasil Implementasi Pengendali Suhu Air Dispenser……….…..
69
4.2
Hasil Pengujian Plant Tanpa Gangguan……….….
73
4.3
Hasil Pengujian Plant Terhadap Gangguan……….
78
4.4
Hasil Pengujian Terhadap Pengondisi Sinyal dan Sensor…..………..
82
4.4.1.
Penguat Non-Inverting……… 82
4.4.2.
Pembagi Tegangan………...……..
83
4.5
Hasil Pengujian Terhadap Driver Plant………... 84
4.5.1.
Penguat Daya………..
84
BAB V. KESIMPULAN DAN SARAN……….
86
5.1
Kesimpulan……….. 86
5.2
Saran……… 86
DAFTAR PUSTAKA
LAMPIRAN
1.
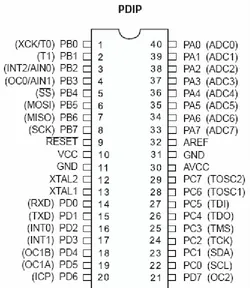
Gambar 2-1 Konfigurasi Pin Mikrokontroler ATMega32……….. 7
2.
Gambar 2-2 Peta Memori
Flash
Mikrokontroler ATMega32……….... 8
3.
Gambar 2-3 Peta Memori Data SRAM……….. 9
4.
Gambar 2-4 Register – Register Pada EEPROM (a) Register EEAR,
(b) Register EEDR, (c) Register EECR……….. 10
5.
Gambar 2-5 Register TCCR0……… 12
6.
Gambar 2-6 Register TCCR1B………. 13
7.
Gambar 2-7 Register TCCR2……… 13
8.
Gambar 2-8 Register ADMUX……….. 15
9.
Gambar 2-9 Format Data ADC dengan ADLAR = 0……….…… 15
10.
Gambar 2-10
Format Data ADC dengan ADLAR = 1……….. 16
11.
Gambar 2-11 Register ADCSRA………... 17
12.
Gambar 2-12 Register SFIOR……….…... 18
13.
Gambar 2-13 Tahapan proses dalam logika
fuzzy
……….. 20
14.
Gambar 2-14 Fungsi keanggotaan variabel masukan suhu air………... 21
15.
Gambar2-15 Metode defusifikasi dengan
Height
………. 24
16.
Gambar 2-16 Arsitektur pengendali
fuzzy
……… 25
17.
Gambar 2-17
Fuzzy set
……… 26
18.
Gambar 2-18 Arsitektur umum sistem pengendali
fuzzy
... 26
19.
Gambar 2-19
Membership
input error
dengan 7
membership
(en)…… 27
22.
Gambar 2-22 Konstruksi LCD……….………….. 29
23.
Gambar 2-23 Hubungan posisi tampilan dan alamat DDRAM………. 30
24.
Gambar 2-24 Hubungan antara CGROM dengan DRAM…………... 31
25.
Gambar 2-25 Konstruksi termoelektrik………. 34
26.
Gambar 2-26 Elemen pemanas dispenser……….……. 34
27.
Gambar 2-27
Thermistor
……….. 35
28.
Gambar 2-28 Hubungan antara resistansi dan temperatur pada NTC... 35
29.
Gambar 2-29 (a) Simbol (b) Rangkaian ekivalen………….………… 37
30.
Gambar 2-30 Kurva karakteristik TRIAC...………. 38
31.
Gambar 2-31 Penguat
non-inverting
……….... 38
32.
Gambar 2-32 Komparator……….………… 39
33.
Gambar 2-32 Koneksi Darlington……… 40
34.
Gambar 2-33 Rangkaian dasar pembagi tegangan………... 40
35.
Gambar 2-34 Kurva tanggapan transient……… 42
36.
Gambar 3-1 Blok diagram rancangan………...………... 43
37.
Gambar 3-2 Rancangan blok diagram
closed loop
pengendali suhu air
dingin……… 45
38.
Gambar 3-4 Bentuk fisik dispenser yang digunakan... 46
39.
Gambar 3-5
Rancangan rangkaian penguat
non-inverting
……….... 47
40.
Gambar 3-6 Rangkaian Pembagi Tegangan... 49
HD44780... 52
44.
Gambar 3-10 Tombol Pemilih……….……… 53
45.
Gambar 3-11 Rangkaian
zero crossing detector
….……….…... 54
46.
Gambar 3-12 Rangkaian Lengkap... 55
47.
Gambar 3-13 Diagram alir program utama... 56
48.
Gambar 3-14 Diagram alir inisialisasi awal... 57
49.
Gambar 3-15
Diagram alir subrutin inisialisasi LCD... 57
50.
Gambar 3-16
Diagram alir subrutin tampilan awal LCD…………... 58
51.
Gambar 3-17
Tampilan awal LCD………. 58
52.
Gambar 3-18
Diagram alir subrutin tampilan
input
LCD…………..
59
53.
Gambar 3-19 Diagram Contoh tampilan input LCD……….. 59
54.
Gambar 3-20 Subrutin cek
input
... 61
55.
Gambar 3-21 Diagram alir subrutin ADC…….………. 61
56.
Gambar 3-22 Diagram alir subrutin
fuzzy logic control
………. 63
57.
Gambar 3-23
Diagram alir subrutin
output
data…….……… 63
58.
Gambar 3-24
Membership input error
suhu dingin(en)……….. 67
59.
Gambar 3-25
Membership input
perubahan
error
suhu dingin(Cen).. 67
60.
Gambar 3-26
Membership output
suhu dingin(
δ
u
n)………….…... 6861.
Gambar 3-27
Membership input error
suhu panas (en)……….. 68
62.
Gambar 3-28
Membership input
perubahan
error
suhu panas (Cen).. 68
65.
Gambar 4-1(b) Rangkaian elektronis di dalam plant……….. 70
66.
Gambar 4-2 Tampilan pada LCD (a) tampilan saat dispenser baru
menyala (b) tampilan pilihan yang pertama setelah 1,5 detik (c)
pilihan kedua (d) pilihan ketiga (e) pilihan keempat……… 71
67.
Gambar 4-3 Bentuk fisik tombol pemilih yang digunakan…………. 72
68.
Gambar 4-4 Grafik
output
pengatur suhu air dispenser untuk pilihan
agak panas……… 73
69.
Gambar 4-5 Grafik
output
pengatur suhu air dispenser untuk pilihan
panas……… 75
70.
Gambar 4-6 Grafik
output
pengatur suhu air dispenser untuk pilihan
paling panas………. 75
71.
Gambar 4-7 Grafik
output
pengatur suhu air dispenser untuk pilihan
agak dingin……….……….. 76
72.
Gambar 4-8 Grafik
output
pengatur suhu air dispenser untuk pilihan
dingin……….……….……….. 76
73.
Gambar 4-9 Grafik
output
pengatur suhu air dispenser untuk pilihan
paling dingin………...……….. 77
74.
Gambar 4-10 Grafik tanggapan sistem yang diberi gangguan untuk
pilihan agak dingin………... 79
75.
Gambar 4-11 Grafik tanggapan sistem yang diberi gangguan untuk
pilihan dingin………...……….... 79
pilihan agak panas……….…... 80
78.
Gambar 4-14 Grafik tanggapan sistem yang diberi gangguan untuk
pilihan panas…….………... 81
79.
Gambar 4-15 Grafik tanggapan sistem yang diberi gangguan untuk
pilihan paling panas…….……….………... 81
80.
Gambar 4-16 Sinyal hasil pengujian terhadap
zero crossing detector
85
1.
Tabel 2-1 Fungsi Alternatif Port A……….…. 11
2.
Tabel 2-2 Fungsi Alternatif Port B………..… 11
3.
Tabel 2-3 Fungsi Alternatif Port C………..… 11
4.
Tabel 2-4 Fungsi Alternatif Port D………..… 12
5.
Tabel 2-5 Konfigurasi bit clock select untuk memilih sumber clock.. 12
6.
Tabel 2-6 Konfigurasi bit clock select untuk memilih sumber clock.. 13
7.
Tabel 2-7 Konfigurasi bit clock select untuk memilih sumber clock.. 14
8.
Tabel 2-8 Pemilihan Mode Tegangan Referensi ADC……….……... 15
9.
Tabel 2-9 Tabel Pemilihan Bit Saluran Pembacaan ADC…………... 16
10.
Tabel 2-10 Konfigurasi Clock ADC……… 18
11.
Tabel 2-11 Pemilihan Sumber Picu ADC……… 19
12.
Tabel 2-12 Aturan-aturan kendali fuzzy secara umum……… 27
13.
Tabel 2-13 Aturan-aturan kendali fuzzy secara umum……… 27
14.
Tabel 2-14 Konfigurasi kaki LCD……….. 32
15.
Table 3-1 Hasil pengukuran suhu air dengan sensor suhu LM35.….. 48
16.
Tabel 3-2 Hasil pengukuran sensor suhu NTC……….…….. 49
17.
Tabel 3-3 Hasil pengukuran aktuator termoelektrik………….…….. 65
18.
Tabel 3-4 Hasil pengukuran aktuator elemen pemanas... 65
19.
Tabel 3-5 Normalisasi nilai untuk input error dan perubahan error untuk
suhu dingin………... 66
22.
Tabel 4-1 Pilihan yang tersedia dan set point suhu tiap pilihan.….... 73
23.
Tabel 4-2 Data nilai td, tr, tp, ts, MP dan SSE untuk semua pilihan
yang tersedia……… 77
24.
Tabel 4-3 Data nilai td, tr, tp, ts, MP dan SSE dengan pilihan awal dingin
dan panas……….. 78
25.
Tabel 4-4 Perbandingan rentang suhu kerja dispenser tanpa kontroler
fuzzy dengan dispenser berbasis kontroler fuzzy dengan set point 90 ºC
dan 15 ºC……….. 82
26.
Tabel 4-5 Hasil pengujian pengkondisi sinyal sensor untuk suhu panas
yang digunakan……….... 83
27.
Tabel 4-6 Hasil pengujian pengkondisi sinyal sensor suhu dingin yang
digunakan………. 83
28.
Tabel 4-7 Hasil pengujian terhadap penguat daya…..……… 84
29.
Tabel 4-8 Hasil pengujian terhadap solid state relay….………. 85
1.
LAMPIRAN DATA PENGUJIAN……….
L1
2.
LAMPIRAN LISTING PROGRAM………...
L2
3.
LAMPIRAN RANGKAIAN LENGKAP……… L3
4.
LAMPIRAN DATASHEET………
L4
1.1.
Judul
Pengendali Suhu Air Dispenser Berbasis Kontroler Logika Fuzzy dengan
Mikrokontroler ATMega32
1.2.
Latar Belakang Masalah
Aksi pengontrolan dewasa ini sudah mengalami kemajuan yang sangat
pesat. Berbagai teknik pengontrolan untuk berbagai aplikasi di berbagai bidang
terutama di bidang perindustrian sudah menjadi hal yang sangat vital. Sebagai
contoh, mulai tahun 90-an para manufaktur industri yang bergerak di bidang
Distributed Control System (DCSs), Programmable Logic Controllers (PLCs),
dan Microcontrollers (MCUs) [1].
Salah satu teknik pengontrolan yang sering digunakan saat ini adalah
pengontrolan dengan logika kabur (fuzzy) [2]. Dalam perspektif yang lebih luas,
pengendali
fuzzy ternyata sangat bermanfaat pada aplikasi-aplikasi sistem
identifikasi dan pengendalian ill-structured, dengan linieritas dan invariansi waktu
tidak bisa ditentukan dengan pasti, karakteristik proses mempunyai faktor lag, dan
dipengaruhi oleh derau acak (random noise). Bentuk sistem seperti ini jika
dipandang sistem konvensional sangat sulit untuk dimodelkan.
Kontroler dengan logika fuzzy telah berhasil menerobos kendala-kendala
yang dulu pernah ditemui dan segera menjadi basis teknologi tinggi. Penerapan
teori logika ini dianggap mampu menciptakan sebuah revolusi dalam teknologi.
Pada saat yang bersamaan, pertumbuhan yang luar biasa terjadi pada industri
perangkat lunak yang menawarkan kemudahan penggunaan logika fuzzy dan
penerapan logika fuzzy pada setiap aspek kehidupan sehari-hari.
Biasanya dalam suatu sistem kontrol diperlukan suatu penampil yang
digunakan untuk membantu pengontrolan. Komponen yang sering digunakan
adalah Liquid Crystal Display (LCD) [3] karena LCD dapat menampilkan banyak
karakter dalam waktu yang bersamaan dan dapat membentuk karakter huruf dan
angka sehingga lebih mudah digunakan oleh user.
1.3.
Tujuan dan Manfaat
Tujuan penelitian ini adalah menghasilkan Model pengontrol suhu pada
dispenser dengan menggunakan kontroler fuzzy.
Manfaat yang akan dicapai adalah:
1.
Untuk masyarakat umum
Masyarakat dapat memperoleh suatu dispenser yang memiliki sistem
pengendalian fuzzy dan dapat memilih tingkat panas atau dingin tertentu.
2.
Untuk perkembangan ilmu pengetahuan
a.
Menambah satu aplikasi dari kontroller fuzzy.
b.
Menambah literatur aplikasi bersama antara devais, elektronika analog,
elektronika digital dan mikrokontroler.
1.4.
Batasan Masalah
Pembahasan perancangan model pengontrol suhu ruangan dengan logika
fuzzy lebih difokuskan dalam batasan-batasan masalah sebagai berikut:
1.
Menggunakan kontroller Fuzzy dengan mikrokontroller AVR seri
ATMega32.
2.
Jumlah Membership 7.
3.
Bahasa pemrograman menggunakan AVR GCC 4.13 bawaan dari AVR
studio4 dengan kompiler WinAVR.
5.
Input berupa pilihan tingkat panas atau dingin yang diinginkan melalui
tombol-tombol.
6.
Output berupa tampilan pilihan dengan LCD.
7.
Sensor yang digunakan adalah LM35 untuk mengukur suhu panas dan
thermistor NTC untuk mengukur suhu dingin pada dispenser.
8.
Pendingin menggunakan termoelektrik dan pemanas menggunakan elemen
pemanas.
1.5.
Metodologi Penelitian
Metode penelitian yang digunakan adalah mengumpulkan sejumlah
referensi atau literatur dari perpustakaan, internet dan sumber-sumber lainnya,
menyusun perancangan dan melakukan serangkaian percobaan untuk
merealisasikan perancangan. Pengujian dilakukan dengan memberikan gangguan
pada sistem dengan membuka dan menutup keran air pada dispenser, mengambil
data melalui sensor dan menganalisis bagaimana kontrol fuzzy menangani
gangguan yang diterimanya.
Hasil yang ingin dicapai dari penelitian ini adalah menghasilkan suatu
kontroller fuzzy yang
handal dan bisa
memberikan pengendalian yang sangat baik
untuk mengontrol suhu air dispenser.
1.6.
Sistematika Penulisan
BAB I : PENDAHULUAN
BAB ini berisi latar belakang penelitian, tujuan dan manfaat penelitian,
batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
BAB ini berisi studi pustaka tentang landasan teori penelitian: Penguat
Daya, thermoelektrik.
BAB III : RANCANGAN PENELITIAN
BAB ini berisi tentang diagram blok perancangan, perancangan perangkat
keras (hardware) dan perancangan perangkat lunak (software) dari peralatan yang
akan dibuat.
BAB IV : HASIL DAN PEMBAHASAN
BAB ini berisi hasil perancangan perangkat keras, data hasil pengujian,
analisis data dan pembahasan.
BAB V: KESIMPULAN DAN SARAN
2.1.
Mikrokontroler ATMega32 [1]
2.1.1. Gambaran
Umum
ATMEGA32 termasuk dalam
microcontroller unit
(MCU) 8 – bit
keluarga AVR (
Alf and Vegard’s Risc Processor
) ATMega yang memiliki daya
guna tinggi dan penggunaan daya yang rendah. ATMega32 dirancang berdasarkan
arsitektur RISC (
Reduced Instruction Set Computing
), dimana semua instruksi
dikemas dalam kode 16 – bit (
16 – bits word
) dan sebagian besar instruksi
dieksekusi dalam 1 (satu) siklus.
Fitur :
a.
Didesain berdaya rendah dan semua operasi bersifat statis.
b.
Memory
flash
sebesar 32K –
bytes
.
c.
EEPROM sebesar 1024
bytes
.
d.
SRAM
internal
sebesar 2K –
bytes
.
e.
Antarmuka (
interface
) JTAG (memenuhi standard IEEE 1149.1).
f.
Dua buah
timer / counter
8 – bit.
g.
Satu buah
timer / counter
16 – bit.
h.
PWM (
Pulse Width Modulation
) sebanyak 4 (empat) kanal (
channels
).
i.
ADC (
Analog – to – Digital Converter
)
internal
dengan fidelitas 10 – bit
sebanyak 8
channels
.
j.
Portal komunikasi serial (USART)
k.
Analog
comparator
internal.
l.
Enam pilihan
mode
sleep
penghemat penggunaan daya listrik.
m.
Tegangan operasi 2.7 – 5.5V (untuk ATMega32L) dan 4.5 – 5.5V (untuk
ATMega32).
n.
Kecepatan maksimal 16 MHz.
o.
Unit interupsi internal dan eksternal.
p.
Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D.
q.
ATMega32 terdiri dari 40-pin PDIP, 44-lead TQFP dan 44-pad MLF.
Konfigurasi pin dari mikrokontroler ATMega32 ditunjukkan pada gambar
2-1.
2.1.2.
Memori
a.
Memori
Flash
(
Program Memory
)
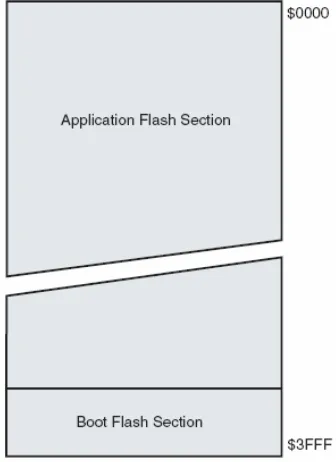
Mikrokontroler ATMega32 memiliki memori
flash
sebesar 32K
bytes
yang bisa diprogram berulang – ulang (
reprogrammable
). Demi keamanan
program, memori
flash
dibagi menjadi 2 (dua) bagian, yaitu bagian
boot
program
dan bagian
application program
. Memori
flash
terletak pada
alamat $0000 - $3FFF. Peta memori
flash
ditunjukkan oleh gambar 2-2.
Gambar 2-2
Peta Memori
Flash
Mikrokontroler ATMega32
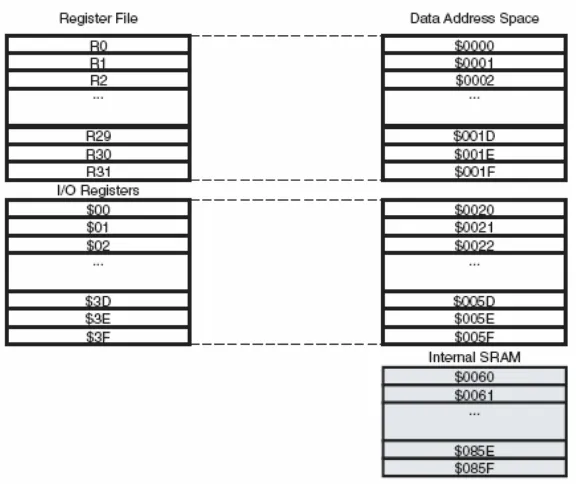
b.
Memori Data SRAM (
Static Random – Access Memory
)
Mikrokontroler ATMega32 memiliki SRAM
internal
sebesar 2K
bytes
.
Oraganisasi memori data SRAM pada mikrokontroler ATMega32 dapat
dilihat pada peta memori data seperti yang ditunjukkan oleh gambar 2-3
Gambar 2-3
Peta Memori Data SRAM
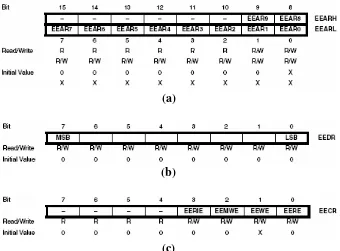
c.
EEPROM
EEPROM (
Electrically Erasable Programmable Read Only Memory
)
adalah salah satu dari tiga tipe memori pada ATMega32 (dua yang lain
adalah
flash
dan SRAM – sudah dijelaskan pada subbab sebelumnya).
EEPROM tetap dapat menyimpan data saat tidak dicatu daya dan juga
dapat diubah saat program berjalan. Oleh karena itu, EEPROM sangat
berguna untuk menyimpan informasi, seperti nilai kalibrasi, nomor ID dan
juga
password
. Pada EEPROM terdapat 3 buah
register
yang harus diatur
untuk menuliskan data ke dalam EEPROM, ketiga
register
tersebut adalah
EEAR (EEPROM
Address Register
), yaitu tempat di mana alamat data
yang akan ditulis dimasukkan. EEDR (EEPROM
Data Register
), yaitu
tempat
register
untuk menyimpan data. Dan EECR (EEPROM
Control
(a)
(b)
(c)
Gambar 2-4
Register – Register Pada EEPROM
(a)
Register EEAR;
(b)
Register EEDR;
(c)
Register EECR.
2.1.3.
Port Input/Output (
I/O Ports
)
Mikrokontroler ATMega32 memiliki 32 pin I/O
bidirectional
.
Semua pin ini dapat diprogram sebagai
input
ataupun
output
. Selain
sebagai
input
atau
output
, Port A, Port B, Port C dan Port D
mikrokontroler ATMega32 juga memiliki fungsi alternatif. Port A adalah
port dengan fungsi alternatif, yaitu sebagai port masukan sinyal
analog
untuk ADC (
Analog – to Digital Converter
). Perlu diperhatikan bahwa
ketika difungsikan sebagai masukan analog untuk ADC, maka Port A tidak
ADC menjadi tidak tepat. Fungsi-fungsi alternatif port-port lainnya dapat
dilihat pada tabel 2-2, 2-3 dan table 2-4 menunjukkan fungsi – fungsi
alternatif tersebut.
Tabel 2-1
Fungsi Alternatif
Port
A
Tabel 2-2
Fungsi Alternatif
Port
B
Tabel 2-4
Fungsi Alternatif
Port
D
2.1.4.
Timer / Counter
AVR ATmega8535 memiliki tiga buah
timer,
yaitu
Timer / Counter
0 (8
bit), Timer / Counter 1 (16 bit),
Timer / Counter
2 (8 bit).
a.
Timer / Counter 0
Pengaturan diatur oleh TCCR0 (
Timer / Counter Control Register
0) yang
dapat dilihat pada gambar 2-5 dan tabel 2-5.
Gambar 2-5
Register TCCR0
Tabel 2-5
Konfigurasi bit
clock select
untuk memilih sumber
cloc
k
CS02 CS01 CS00 Description
0 0 0
Timer / Counter
berhenti (tidak aktif)
0 0 1
Clock
tanpa prescaling
0 1 0
Clock
/ 8
0 1 1
Clock
/ 64
1 0 0
Clock
/ 256
1 0 1
Clock
/ 1024
1 1 0 Sumber
clock
berasal dari pin T0.
clock
dengan
falling edge
b.
Timer / Counter
1
Pengaturan diatur oleh TCCR1B (
Timer / Counter Control Register
1B)
yang dapat dilihat pada gambar 2-6 dan tabel 2-6.
Gambar 2-6
Register TCCR1B
Tabel 2-6
Konfigurasi bit
clock select
untuk memilih sumber
clock
CS12 CS11 CS10 Description
0 0 0
Timer / Counter
berhenti (tidak aktif)
0 0 1
Clock
tanpa prescaling
0 1 0
Clock
/ 8
0 1 1
Clock
/ 64
1 0 0
Clock
/ 256
10 0 1
Clock
/ 1024
1 1 0 Sumber
clock
berasal dari pin T1.
clock
dengan
falling edge
1 1 1 Sumber
clock
berasal dari pin T1.
clock
dengan
rising edge
c.
Timer / Counter 2
Pengaturan diatur oleh TCCR2 (
Timer / Counter Control Register
2) yang
dapat dilihat pada gambar 2-7 dan tabel 2-7
Tabel 2-7
Konfigurasi bit
clock select
untuk memilih sumber
clock
CS22 CS21 CS20 Description
0 0 0
Timer / Counter
berhenti (tidak aktif)
0 0 1
Clock
tanpa
prescaling
0 1 0
Clock
/ 8
0 1 1
Clock
/ 32
1 0 0
Clock
/ 64
10 0 1
Clock
/ 128
1 1 0
Clock
/ 256
1 1 1
Clock
/ 1024
2.1.5.
ADC (
Analog to Digital Converter
)
ATMega32 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran
(
channels
) ADC
internal
dengan fidelitas 10 bit. Dalam mode operasinya, ADC
ATMega32 dapat dikonfigurasi, baik sebagai
single ended input
maupun
differential input
. Selain itu, ADC ATMega32 juga memiliki konfigurasi
pewaktuan, tegangan referensi, mode operasi dan kemampuan filter derau yang
amat fleksibel sehingga dapat dengan mudah disesuaikan dengan kebutuhan dari
ADC itu sendiri.
2.1.5.1.
Inisialisasi ADC
Proses inisialisasi ADC meliputi proses penentuan
clock
, tegangan
referensi, format data keluaran dan mode pembacaan. Register yang perlu diset
nilainya adalah ADMUX (
ADC Multiplexer Selection Register
), ADCSRA (
ADC
Control and Status Register
) dan SFIOR (
Special Function I/O Register
).
ADC,
format data output
dan saluran ADC yang digunakan. Konfigurasinya
seperti pada gambar 2-8 di bawah ini.
Gambar 2-8
Register ADMUX
Bit penyusunnya dapat dijelaskan sebagai berikut :
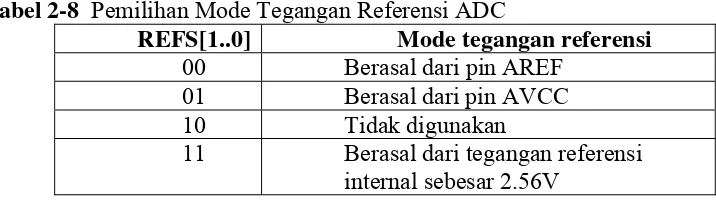
a.
REFS[1..0] merupakan bit pengatur tegangan referensi ADC. Memiliki
nilai awal 00 sehingga referensi tegangan berasal dari pin AREF. Detail
nilai yang lain dapat dilihat pada tabel 2-8 dibawah ini.
Tabel 2-8
Pemilihan Mode Tegangan Referensi ADC
REFS[1..0]
Mode tegangan referensi
00
Berasal dari pin AREF
01
Berasal dari pin AVCC
10 Tidak
digunakan
11
Berasal dari tegangan referensi
internal sebesar 2.56V
b.
ADLAR merupakan bit pemilih mode data keluaran ADC. Bernilai awal 0
sehingga 2 bit tertinggi data hasil konversinya berada di register ADCH
dan 8 bit sisanya berada diregister ADCL, seperti gambar 2-9. Jika bernilai
1, maka hasilnya seperti gambar 2-10.
Gambar 2-10
Format Data ADC dengan ADLAR = 1
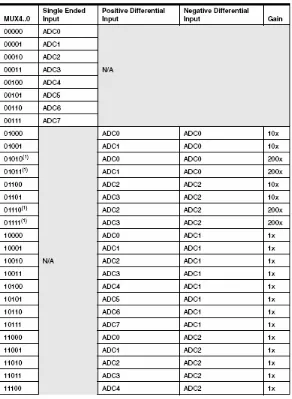
c.
MUX[4..0] merupakan bit pemilih saluran pembacaan ADC. Bernilai awal
00000. Untuk mode
single ended input
, MUX[4..0] bernilai dari 00000 –
00111. berikut tabel konfigurasi bit MUX.
ADCSRA merupakan register 8 bit yang berfungsi melakukan
manajemen sinyal kontrol dan status dari ADC. Memiliki susunan seperti
gambar 2-11 dibawah ini.
Gambar 2-11
Register ADCSRA
Bit penyusunnya dapat dijelaskan sebagai berikut :
a.
ADEN merupakan bit pengatur aktivasi ADC. Bernilai awal 0. Jika
bernilai 1, maka ADC aktif.
b.
ADCS merupakan bit penanda mulainya konversi ADC. Bernilai awal 0
dan selama konversi akan bernilai 1, sedangkan jika konversi telah selesai,
maka akan bernilai 0.
c.
ADATE merupakan bit pengatur aktivasi picu otomatis operasi ADC.
Bernilai awal 0. Jika bernilai 1, operasi konversi ADC akan dimulai pada
saat transisi positif dari sinyal picu yang dipilih. Pemilihan sinyal picu
menggunakan bit ADTS pada register SFIOR.
d.
ADIF merupakan bit penanda akhir suatu konversi. Bernilai awal 0. Jika
bernilai 1, maka konversi ADC pada suatu saluran telah selesai dan data
siap diakses.
e.
ADIE merupakan bit pengatur aktivasi interupsi yang berhubungan dengan
akhir konversi ADC. Bernilai awal 0. Jika bernilai 1 dan jika sebuah
f.
ADPS[2..0] merupakan bit pengatur
clock
ADC. Bernilai awal 000. Detail
nilai bit dapat dilihat pada tabel 2-10 di bawah ini.
Tabel 2-10
Konfigurasi Clock ADC
ADPS[2..0]
Besar clock ADC
000
f
osc1
001
f
osc2
010
f
osc4
011
f
osc8
100
f
osc16
101
f
osc32
110
f
osc64
111
f
osc12
8
SFIOR
merupakan
register
8
bit pengatur sumber picu konversi
ADC, apakah dari picu eksternal atau dari picu internal. Susunannya
seperti gambar 2-12.
Gambar 2-12
Register SFIOR
ADTS[2..0]
merupakan
bit
pengatur picu eksternal operasi ADC.
Hanya berfungsi jika bit ADATE pada register ADCSRA bernilai 1. Detail
nilai ADTS[2..0] dapat dilihat pada tabel 2-11.
2.1.5.2. Pembacaan ADC
Dalam proses pembacaan hasil konversi ADC, dilakukan pengecekan
bernilai satu jika konversi sebuah saluran ADC telah selesai dilakukan dan data
hasil konversi siap untuk diambil, dan demikian sebaliknya. Data disimpan dalam
dua buah register, yaitu ADCH dan ADCL.
Pada ATMega32 terdapat dua cara operasi, yaitu
single conversion
atau
mode
free running
. Mode
free running
memungkinkan hanya perlu mengkonversi
sekali saja, sedangkan pada mode
single conversion
, setiap konversi dimulai
dengan menyeting bit ADCS (ADC
Start Conversion
) pada register ADCSRA.
Mode
single conversion
tersebut biasanya digunakan apabila banyak kanal pada
ADC yang digunakan.
Nilai ADC masukan tunggal dapat dihitung dengan persamaan berikut:
.1024
Vin
ADC
Vref
=
(2.1)
Tabel 2-11
Pemilihan Sumber Picu ADC
ADTS[2..0]
Sumber Picu
000 Mode
free running
001 Komparator
analog
010 Interupsi
eksternal
011
Timer/Counter0 Compare Match
100
Timer/Counter0 Overflow
101
Timer/Counter1 Compare Match B
110
Timer/Counter1 Overflow
2.2
Sistem Kendali
Fuzzy
[2]
2.2.1.
Logika
Fuzzy
Logika kabur (
fuzzy logic
) diperkenalkan oleh Zadeh (1965) dengan
maksud mewakili dan memanipulasi data yang tidak presisi, tapi cenderung kabur.
Logika kabur menyediakan kesimpulan morfologi (ilmu bentuk kata)
memungkinkan kemampuan perkiraan alasan manusia untuk diaplikasikan pada
sistem berbasis pengetahuan.
Logika kabur diimplementasikan dalam empat tahapan :
1.
Tahap fuzzifikasi (
fuzzification
), yakni pemetaan dari masukan tegas ke
himpunan
fuzzy
.
2.
Tahap inferensi, yakni pembangkitan aturan
fuzzy
.
3.
Tahap komposisi, yakni mengkombinasikan
output
yang menyatakan
himpunan
fuzzy
ke dalam sebuah himpunan
fuzzy
.
4.
Tahap defuzzifikasi (
defuzzification
), yakni transformasi keluaran dari
nilai kabur ke nilai tegas.
Keempat tahapan logika
fuzzy
tersebut dapat digambarkan dalam gambar 2-13.
Gambar 2-13
Tahapan proses dalam logika
fuzzy
2.2.2.
Himpunan Tegas / Klasik (
Crisp/ Classic Set
)
Teori himpunan kabur merupakan perluasan dari teori himpunan klasik /
sehingga sebuah elemen dengan mudah dapat diketahui menjadi anggota
himpunan tersebut atau tidak. Tetapi pada kenyataannya ada banyak hal yang
tidak bisa secara tegas dibuat batasnya karena memang mempunyai
batas-batas keanggotaan yang kabur. Untuk itulah dibutuhkan teori lain yaitu teori
himpunan kabur (
fuzzy set
).
2.2.3.
Fuzzifikasi (
Fuzzification
)
Tidak seperti pada sistem klasik, di mana suatu nilai secara tegas dapat
dinyatakan sebagai anggota atau bukan anggota dari suatu fungsi, sistem logika
fuzzy
bekerja atas dasar keanggotaan dari suatu himpunan dan derajat keanggotaan
nilai tersebut untuk suatu fungsi keanggotaan tertentu. Pada tahap pengkaburan
(fuzzifikasi) ini nilai masukan nyata terukur dipetakan dalam keanggotaan
fuzzy
.
Sebagai contoh keanggotaan untuk suhu air dapat dilihat pada gambar 2-14.
2.2.4.
Inferensi
Bagian penentuan aturan dari sistem logika
fuzzy
disebut juga tahap
inferensi. Setelah fungsi keanggotaan untuk variabel masukan dan keluarannya
ditentukan, basis aturan pengendalian dapat dikembangkan untuk menghubungkan
aksi keluaran kontroller terhadap kondisi masukannya. Aturan didasarkan pada
deskripsi kata-kata, bukan dengan definisi matematis, maka semua hubungan yang
dapat dijelaskan dengan ungkapan bahasa pada umumnya dapat dilakukan dengan
pengendali logika
fuzzy
. Karena variabel memiliki keanggotaan berbobot, aturan
yang terdiri atas variabel-variabel ini juga memiliki bobot. Hal ini berarti sistem
non-linier
yang biasanya sulit dikendalikan dengan pengendali konvensional,
dapat dengan mudah dikendalikan oleh pengendali logika
fuzzy
.
Untuk sistem dengan banyak masukan dan keluaran serta memiliki banyak
aturan, fluktuasi liar pada tiap-tiap masukan dapat ditekan dengan pembobotan
aturan. Oleh karena itu sistem logika
fuzzy
bersifat sangat kuat (
robust
) dan
seringkali memungkinkan pembuangan atau pengubahan banyak aturan tanpa
secara signifikan mempengaruhi karakter pengendalian.
2.2.5.
Komposisi
Ada beberapa komposisi, diantaranya komposisi Godel, Mamdani dan
Maximum
(
max
). Metode komposisi yang sering digunakan adalah komposisi
max
, himpunan
fuzzy
untuk
output
ditentukan dengan mengambil titik maksimum
dari semua himpunan
fuzzy
yang dihasilkan oleh proses inferensi untuk
2.2.6.
Defuzzifikasi (
Defuzzification
)
Proses defuzzifikasi adalah proses mengubah variabel keluaran
fuzzy
menjadi nilai-nilai tegas yang dapat digunakan untuk mengendalikan sistem.
Setelah dilakukan evaluasi pada masukan, menerapkan basis aturan, dan
mengkomposisikan himpunan
fuzzy
, pengendali logika
fuzzy
menghasilkan
keluaran untuk diberikan kepada sistem kendali. Banyak metode untuk melakukan
defuzzifikasi ini, seperti
Center Of Gravity / Area
(COG / COA),
Mean Of
Maxima
(MOM) dan
Height / Center Of Average
.
Metode fuzzifikasi yang paling sederhana, mudah dan cepat adalah metode
Height
. Metode ini menjumlahkan titik tengah dari setiap
membership
yang
tersulut, kemudian membaginya dengan jumlahan dari derajat (tinggi)
keanggotaan dari
membership
yang tersulut. U
*adalah nilai tegas, C
(k)merupakan
nilai tengah
membership
, dan
merupakan nilai derajat dari
membership
yang
tersulut.
kf
∑
∑
= ==
n k k k m k kf
f
C
U
1 1 *.
(2.2)
Metode fuzzifikasi lainnya adalah COG :
)
(
)
(
.
1 1 * i i u i u i iU
U
U
U
∑
∑
= ==
l lμ
μ
diskret
(2.3)
du
u
du
u
U
U
u u u u)
(
)
(
.
*μ
μ
∫
∫
Metode fuzzifikasi MOM :
2
(
)
(
sup
)
(
)
(
inf
*
u
height
u
U
U
u
height
u
X
U
U
u u
u u
u
u
∈
=
+
∈
=
=
=μ
=μ
(2.5)
Sebagai contoh pada gambar 2-15 diperlihatkan hasil komposisi yang akan
di defusifikasi dengan metode
Height
. Pada gambar diperoleh derajat dari
membership yang tersulut sebut saja f1 dan f2 dan juga nilai tengah dari
membership yang tersulut yaitu C
1dan C
2. Maka nilai defusifikasinya adalah U
*.
Gambar2-15
Metode defusifikasi dengan
Height
2.2.7.
Logika
Fuzzy
dalam Teknik Kendali
Bentuk logika
fuzzy
dasar adalah arsitektur Mamdani, di mana pengendali
mengubah spesifikasi kinerja eksternal dan sifat
plant
ke dalam bahasa berbasis
aturan (
rule
) secara langsung. Paradigma dasar kendali logika
fuzzy
Mamdani
yang berbasis aturan memetakan
controlled variable
(
CV
1,
CV
2, ...) dari
plant
dengan
manipulated variable
(
MV
1,
MV
2, ...).
Dalam setiap
CV
bisa secara langsung menjadi variabel terukur atau beda
antara variabel terukur tersebut dengan suatu nilai referensi yang telah ditentukan
perubahan
error
(
dt
de
) yang digunakan dalam premis aturan. Untuk implementasi
waktu diskret digunakan
CV
≡
e
( ) (
t
−
e
t
−
T
)
dengan
T
merupakan periode cuplik
sistem.
Struktur pengendali yang menghubungkan arsitektur ini dengan sistem
kendali umpan-balik konvensionalditunjukkan dalam gambar 2-16.
Mesin Inferensi
Aturan
Proses
(
Plant
)
Output
CV
Input
MV
Gambar 2-16
Arsitektur pengendali
fuzzy
Masukan
Fuzzy Logic Controller
(FLC) adalah
error
(
e
) dan perubahan
error
(
ce
). Pengendalian dilakukan oleh FLC yang memetakan nilai
error
,
e
n(
t
),
dan perubahan
error
ternormalisasi,
ce
n(
t
),
yang dinyatakan sebagai
( )
t
n
e
( )
t
e
n=
e( )
t
n
(
e
( ) (
t
e
t
T
)
ce
n=
ce−
−
)
(2.6)
dengan
T
adalah
time step
,
n
edan
n
ceadalah faktor normalisasi, ke dalam
perubahan aksi pengendali
δ
u
n(
t
) melalui aturan dalam bentuk:
If
e
n(
t
) is P and
ce
n(
t
) is N then
δ
u
n(
t
) is Z
P, N, Z merupakan kependekan dari
positive, negative
dan
zero
, yang
didefinisikan sebagai
fuzzy set
melalui variabel-variabel yang relevan seperti yang
Keluaran dari FLC adalah perubahan dari aksi kontrol. Untuk memperoleh
aksi kontrol
u
, perlu diintegralkan dan didenormalisasikan dengan menggunakan
faktor denormalisasi
de
δu, sehingga diperoleh nilai aksi kontrol saat
t
, dimana
nilai perubahan aksi kontrol ditambah dengan nilai
u
sebelumnya, melalui rumus:
( ) (
t
u
t
T
)
de
u
( )
t
u
=
−
+
δuδ
n(2.7)
Gambar 2-17
Fuzzy set
Gambar 2-18
Arsitektur umum sistem pengendali
fuzzy
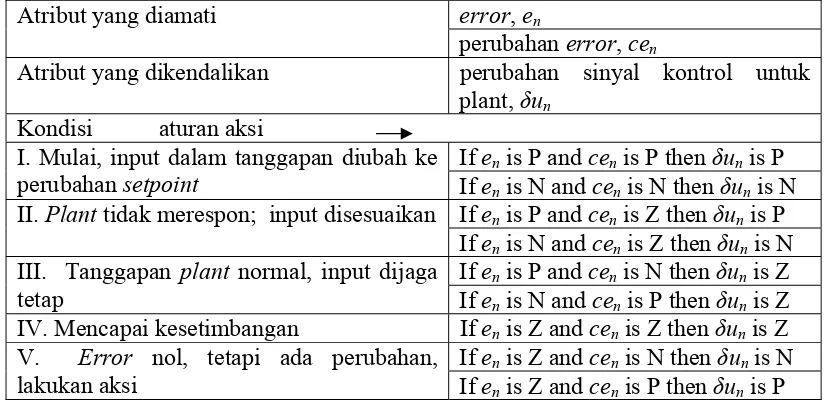
Aturan-aturan tambahan dapat ditentukan dari inspeksi dan dapat dilihat
Tabel 2-12
Aturan-aturan kendali
fuzzy
secara umum
error
,
e
nAtribut yang diamati
perubahan
error
,
ce
nAtribut yang dikendalikan
perubahan sinyal kontrol untuk
plant,
δ
u
nKondisi aturan aksi
If
e
nis P and
ce
nis P then
δ
u
nis P
I. Mulai, input dalam tanggapan diubah ke
perubahan
setpoint
If
e
nis N and
ce
nis N then
δ
u
nis N
If
e
nis P and
ce
nis Z then
δ
u
nis P
II.
Plant
tidak merespon; input disesuaikan
If
e
nis N and
ce
nis Z then
δ
u
nis N
If
e
nis P and
ce
nis N then
δ
u
nis Z
III. Tanggapan
plant
normal, input dijaga
tetap
If
e
nis N and
ce
nis P then
δ
u
nis Z
IV. Mencapai kesetimbangan
If
e
nis Z and
ce
nis Z then
δ
u
nis Z
If
e
nis Z and
ce
nis N then
δ
u
nis N
V.
Error
nol, tetapi ada perubahan,
lakukan aksi
If
e
nis Z and
ce
nis P then
δ
u
nis P
Penambahan aturan yang baru untuk 7
membership
dapat dilihat pada tabel 2-13.
Tabel 2-13
Aturan-aturan kendali
fuzzy
secara umum
e
nCe
nNB NM NS ZE PS PM PB
NB
NB NB NB NB NM NS ZE
NM
NB NB NB NM NS ZE PS
NS
NB NM NM NS ZE PS PM
ZE
NS NS NS ZE PS PM PB
PS
NS NS ZE PS PM PB PB
PM
ZE ZE PS PM PB PB PB
PB
PS PS PM PB PB PB PB
Gambar 2-20
Membership
input
perubahan
error
dengan 7
membership
(Ce
n)
Gambar 2-21
Membership
output dengan 7
membership
(
δ
u
n)
NB, NM, NS, ZE, PS, PM, PB adalah kependekan dari
negative big
,
negative
medium, negative small, zero, positive small, positive medium
dan
positive big.
Katakanlah diperoleh nilai e
n= 0,25 dan Ce
n= 2,25 maka proses fusifikasi
dan defusifikasi yang terjadi dengan menggunakan aturan-aturan dari tabel 2-13.
Jika masukan e = 0,25 dan Ce = 2,25 maka aturan-aturan yang digunakan adalah:
1.
if
e
n= ZE
and
Ce
n= PM
then
δ
u
n= PM
2.
if
e
n= ZE
and
Ce
n= PB
then
δ
u
n= PB
3.
if
e
n= PS
and
Ce
n= PM
then
δ
u
n= PB
4.
if
e
n= PS
and
Ce
n= PB
then
δ
u
n= PB
sedangkan aturan-aturan yang lain tidak tersulut karena nilai
membership output
yang dihasilkan diperoleh derajat keanggotaan = 0. Dengan menggunakan metode
defusifikasi
height
maka nilai defusifikasinya dapat dihitung.
U
*=
0,25
0,75
0,25
.
3,125
0,75
2.
+
+
2.3
Liquid Crystal Display
(LCD) [3]
LCD adalah komponen yang berfungsi untuk menampilkan suatu karakter
pada suatu tampilan (
display
) dengan bahan utama yang digunakan berupa
Liquid
Crystal
. Apabila diberi arus listrik sesuai dengan jalur yang telah dirancang pada
konstruksi LCD, cairan kristal akan terpolarisasi (keruh) sehingga menghalangi
cahaya dan membentuk suatu karakter tertentu. Gambar konstruksi LCD dapat
dilihat pada gambar 2-22.
Gambar 2-22
Konstruksi LCD
LCD yang sering digunakan adalah jenis LCD M1632. M1632 merupakan
modul LCD dengan tampilan 2 x 16 (2 baris, 16 kolom) dengan konsumsi daya
rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus
untuk mengendalikan LCD. Mikrokontroler HD44780 buatan Hitachi yang
berfungsi sebagai pengendali LCD memiliki CGROM (
Character General Read
Only Memory
), CGRAM (
Character General Random Access Memory
) , dan
2.3.1.
DDRAM (
Display Data Random Access Memory
)
DDRAM merupakan memori tempat karakter yang ditampilkan berada.
Contoh, untuk karakter ‘A’ atau 41H yang ditulis pada alamat 00h, maka karakter
tersebut akan tampil pada baris pertama dan kolom pertama dari LCD. Apabila
karakter tersebut ditulis di alamat 40h, maka karakter tersebut akan tampil pada
baris kedua kolom pertama dari LCD. Hubungan posisi tampilan dan alamat
DDRAM ditunjukkan gambar 2-23.
Gambar 2-23
Hubungan posisi tampilan dan alamat DDRAM.
2.3.2.
CGRAM (
Character Generator Random Access Memory
)
CGRAM adalah memori untuk menggambarkan pola sebuah karakter dan
bentuk karakter dapat diubah-ubah sesuai keinginan. Isi memori ini akan hilang
saat
power supply
tidak aktif, sehingga pola karakter akan hilang.
2.3.3.
CGROM (
Character Generator Read Only Memory
)
CGROM adalah memori untuk menggambarkan pola sebuah karakter dan
pola tersebut sudah ditentukan secara permanen dari HD44780 sehingga pengguna
tidak dapat mengubah lagi. Memori ini bersifat permanen, sehingga pola karakter
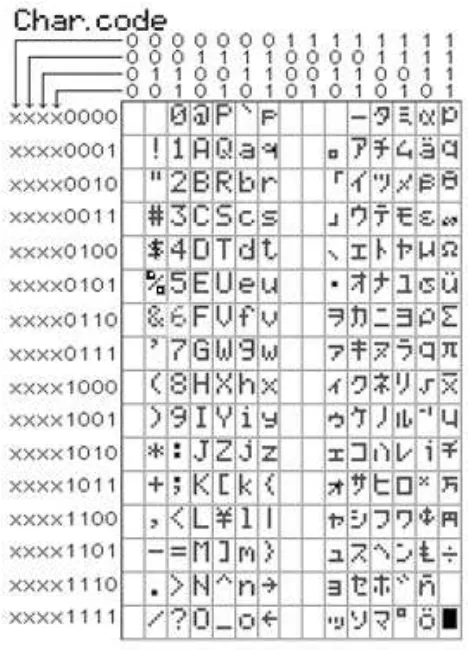
Tampilan karakter pada LCD ini menggunakan kode ASCII. Tampilan
karakter pada LCD dengan kode ASCII-nya sekaligus hubungan antara CGROM
dengan DDRAM dapat dilihat pada gambar 2-24 di bawah ini.
Pada gambar 2-24, terlihat pola-pola karakter yang tersimpan dalam
lokasi-lokasi tertentu dalam CGROM. Pada saat HD44780 akan menampilkan
data 4CH yang tersimpan pada DDRAM, maka HD44780 akan mengambil data di
alamat 4CH (0100 1100) yang ada pada CGROM, yaitu pola karakter ”L”. Untuk
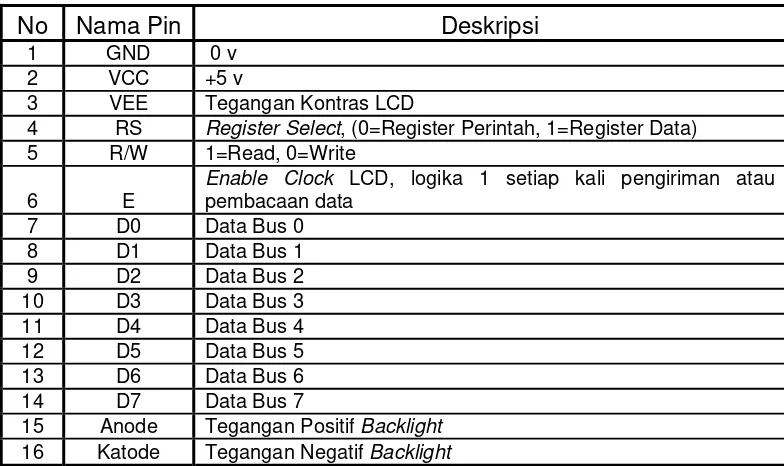
konfigurasi kaki keluaran LCD dapat dilihat pada tabel 2-14.
Tabel 2-14
Konfigurasi kaki LCD
No Nama
Pin
Deskripsi
1 GND 0 v
2 VCC +5 v
3 VEE Tegangan Kontras LCD
4 RS Register Select, (0=Register Perintah, 1=Register Data)
5 R/W 1=Read, 0=Write
6 E
Enable Clock LCD, logika 1 setiap kali pengiriman atau pembacaan data
7 D0 Data Bus 0
8 D1 Data Bus 1
9 D2 Data Bus 2
10 D3 Data Bus 3
11 D4 Data Bus 4
12 D5 Data Bus 5
13 D6 Data Bus 6
14 D7 Data Bus 7
15 Anode Tegangan Positif Backlight 16 Katode Tegangan Negatif Backlight
2.4
Termoelektrik [4]
Termoelektrik merupakan sebuah fenomena terjadinya perubahan
sifat-sifat termodinamika menjadi sifat-sifat-sifat-sifat elektrik dan sebaliknya. Dua batang logam
berbeda bahan yang disambungkan dan dialiri arus listrik. Ketika salah satu ujung
dipanaskan maka pada rangkaian tertutup tersebut akan mengalir arus. Fenomena
ini dinamakan efek
Seebeck
, karena ditemukan oleh Thomas Seebeck pada tahun
1821.
Begitu pula bila dilakukan hal yang sebaliknya, yaitu jika rangkaian
tertutup dari dua batang logam berbeda bahan yang disambungkan tersebut
dialirkan arus listrik. Pada salah satu ujung sambungan akan menyerap kalor
sehingga menjadi panas dan pada ujung sambungan lainnya akan terasa dingin.
dinamakan efek
Peltier
yang kemudian digunakan sebagai dasar pembuatan
termoelektrik.
Dengan menempatkan ujung dari sambungan yang menyerap kalor pada
ruang yang akan didinginkan, maka ruang tersebut lama-kelamaan akan menjadi
dingin akibat kalor dipindahkan ke tempat lain hanya menggunakan energi
elektrik tanpa melibatkan refrigeran apapun.. Konstruksi dasar termoelektrik dapat
dilihat pada gambar 2-25.
Ketika elektron berpindah dari bahan semikonduktor tipe P ke bahan tipe
N melalui suatu sambungan elektrik, elektron melompat ke energi yang lebih
tinggi dengan menyerap energi panas (pada sisi dingin). Secara berlanjut melalui
kisi-kisi bahan, elektron mengalir dari bahan tipe N ke bahan tipe P melalui suatu
sambungan elektrik, sambil melepaskan keadaan energi panas yang melemah ke
bagian sisi panas.
2.5
Elemen Pemanas [5]
Pemanas air yang digunakan pada dispenser air biasanya disebut dengan
elemen pemanas. Elemen pemanas ini merupakan suatu resistansi yang berupa
lilitan logam. Karena dialiri arus dan tegangan yang tinggi, maka daya yang
terjadi pada elemen ini juga besar. Oleh karena itu lama kelamaan elemen ini akan
menghasilkan kalor karena energi yang terbuang.
Elemen pemanas ini bekerja dengan sumber AC 220V. Gambar elemen
Gambar 2-25
Konstruksi termoelektrik
Gambar 2-26
Elemen pemanas dispenser air
2.6
Rangkaian Elektronis
2.6.1.
Sensor Suhu LM35 [6]
Sensor suhu LM35 memiliki kemampuan untuk mengukur suhu ruangan
dalam skala °C dengan keluaran tegangan 10mV untuk setiap °C. Sensor suhu
LM35 dapat bekerja pada sumber tegangan 4-35V. Rentang suhu yang mampu
diukur oleh sensor ini adalah dari -5°C s/d 150 °C.
2.6.2.
Sensor Suhu NTC (
Negative Temperature Coefficient
) [7]
Thermistor
adalah suatu komponen yang resistansinya berubah saat
seiring kenaikan suhu disebut
Positive Temperature Coefficient
(PTC) dan yang
resistansinya meningkat seiring penurunan suhu disebut
Negative Temperature
Coefficient
(NTC).
Thermistor
yang biasanya digunakan dapat dilihat pada
gambar 2-27.
Gambar 2-27
Thermistor
Hubungan antara perubahan resistansi dan suhu pada NTC dapat dilihat
pada gambar 2-28. Dari gambar 2-28 dapat dilihat bahwa semakin tinggi suhunya
maka resistansi
thermistor
NTC akan semakin menurun. Thermistor biasanya
digunakan untuk sensor suhu, pengaman rangkaian dengan resistansinya yang
tinggi dan pembatas arus yang bekerja seiring perubahan suhu.
Gambar 2-28
Hubungan antara resistansi dan temperatur pada NTC
2.6.3.
Solid State Relay (SSR)
2.6.3.1
TRIAC [8]
Triac adalah alat semikonduktor empat lapis (PNPN) yang mempunyai
tiga terminal, yaitu terminal utama 2 (MT
2), terminal utama 1 (MT
1) dan gerbang
(G). Triac merupakan alat thyristor dan banyak digunakan. Keluaran dari triac
adalah arus bolak-balik, bukan arus searah. Triac dibuat untuk menyediakan cara
agar kendali daya ac ditingkatkan. Rangkaian ekivalen triac diperlihatkan sebagai
dua SCR yang dihubungkan paralel terbalik seperti diperlihatkan pada Gambar
2-29.
Jika terminal MT1 dan MT2 diberi tegangan AC dan
gate
dalam kondisi
mengambang, maka tidak ada arus yang dilewatkan oleh triac sampai pada
tegangan
breakover
triac tercapai. Pada kondisi ini, triac
OFF
. Pada saat
gate
diberi arus positif atau negatif, tegangan
breakover
akan turun. Semakin besar
nilai arus yang masuk ke
gate,
semakin rendah tegangan
breakover
. Pada kondisi
ini triac menjadi
ON
selama tegangan pada MT1 dan MT2 di atas nol volt.
Apabila tegangan pada MT1 dan MT2 sudah mencapai nol volt, maka kondisi
kerja triac akan berubah dari
ON
ke
OFF
. Ketika triac sudah menjadi
OFF
kembali, triac akan selamanya
OFF
sampai ada arus
trigger
ke
gate
dan tegangan
MT1 dan MT2 melebihi tegangan
breakover
. Gambar 2-29 memperlihatkan
daerah kerja triac.
2.6.3.2
Optoisolator [10]
Optoisolator yang digunakan adalah MOC3020. Optoisolator terdiri dari
photodioda sehingga dapat mengaktifkan komponen atau rangakaian yang
terhubung pada optoisolator. Optoisolator digunakan untuk mengisolasi rangkaian
yang bekerja dengan sumber DC dengan rangkaian yang bekerja dengan sumber
AC.
2.6.4.
Penguat Non-Inverting [9]
Penguat
non-inverting
berfungsi untuk memperbesar sinyal tanpa merubah
fasanya. Rangkaian penguat
non-inverting
dapat dilihat pada gambar 2-31.
Nilai tegangan keluaran (Vout) dapat dirumuskan sebagai berikut:
Vout = (1+
R
Rf
) vin
(2.8)
Dengan penguatan tegangan (Av) sebagai berikut:
Av = (1+
R
Rf
) (2.9)
Gambar 2-30
Kurva karakteristik TRIAC
Gambar 2-31
Penguat
non-inverting
2.6.5.
Komparator [9]
Komparator merupakan suatu rangkaian pembanding. Disebut pembanding
karena keluarannya akan berubah bila nilai masukannya lebih tinggi atau lebih
rendah dari V
nya. Ketika masukan lebih tinggi daripada suatu batasan
tertentu, keluaran komparator tinggi. Bila masukan berada di bawah batasan lain
(batas bawah), maka keluarannya rendah. Rangkaian komparator dan kurva
karakteristiknya ditunjukkan pada gambar 2-32.
ref
Nilai tegangan keluaran (Vout) dapat dirumuskan sebagai berikut:
in
V
>
V
refmaka Vout = +Vsat
(2.10)
in
in
V
≈
V
refmaka Vout = A
OL(V
in-V
ref)
(2.12)
Out
ref
V
+Vsat
-Vsat
in
V
Gambar 2-32
Komparator
2.6.6.
Darlington [7]
Saat ini kebutuhan akan arus yang besar untuk peningkatan daya yang
digunakan untuk komponen yang membutuhkan
supply
daya yang cukup besar
semakin banyak. Transistor sangat banyak digunakan sebagai penguat daya yang
efektif. Akan tetapi transistor juga memiliki batas penguatan.
Hubungan antara dua buah transistor bipolar yang sangat populer untuk
operasi sebagai transistor ”super beta” adalah Darlington seperti yang terlihat
pada gambar 2-32. Fitur utama darlington adalah gabungan transistor yang bekerja
sebagai satu unit dengan penguatan arus. Jika rangkaian yang dibangun dengan
dua buah transistor terpisah mempunyai penguatan
β
1dan
β
2maka Darlington
menyediakan penguatan arus :
β
D=
β
1β
2(2.10)
Dengan mengasumsikan
β
transistor Q1 dan transistor Q2 yang digunakan
untuk koneksi Darlington adalah sama maka penguatan arus yang dihasilkan
adalah :
Q1
Q2
E C
B
Gambar 2-32
Koneksi Darlington
2.6.7.
Pembagi Tegangan (
Voltage Divider
) [7]
Dalam rangkaian elektronis terdapat hubungan seri dan paralel. Jika
komponen pasif seperti resistor terhubung paralel, maka tegangan antara resistor
yang satu dengan yang lainnya adalah sama. Tetapi jika terhubung seri maka
tegangan pada resistor satu dengan yang lainnya menjadi terbagi.
Hal ini sering dimanfaatkan untuk berbagai aplikasi yang saat ini kita
gunakan. Rangkaian dasar pembagi tegangan dapat dilihat pada gambar 2-33.
Cara menghitung tegangan yang terbagi adalah sebagai berikut :
VR
2=
VCC
1
R
2
R
2
R
×
+
(2.12)
R1
R2 VR2
VCC
digunakan, yaitu dengan syarat awal standar bahwa sistem mula-mula diam
dengan keluaran dan semua turunan waktunya nol[11]. Dengan demikian,
karakteristik tanggapannya dapat dengan mudah dibandingkan.Tanggapan
transien suatu sistem kontrol secara praktek selalu menunjukkan osilasi teredam
sebelum mencapai keadaan tunaknya. Dalam mengolongkan karakteristik
tanggapan transien suatu sistem kontrol terhadap masukan tangga satuan, umum
dikelompokkan sebagai berikut[11].
1.
Waktu tunda (td)
2.
Waktu naik (tr)
3.
Waktu puncak (tp)
4.
Overshoot
maksimum (Mp)
5.
Waktu turun (ts)
Pengelompokan ini didefinisikan sebagai berikut dan secara grafik
ditunjukkan pada gambar 2-34.
1.
Waktu tunda (td) : waktu yang diperlukan oleh tanggapan untuk