BAB IV
HASIL PENGUJIAN DAN ANALISA
4.1 Pendahuluan
Pada bab ini akan dijelaskan tentang simulasi dan hasil penelitian serta analisa
Motor switched reluctance. Pengujian alat ini dilakukan di Laboratorium Program
Studi Teknik Elektro . Pada tugas Akhir ini akan dilakukan analisa dan putaran
motor switched reluctance 4 fasa, serta diuraikan hasil pengujian dan pembahasan,
4.2 Simulasi pada Software PSIM
Simulasi tugas akhir ini menggunakan software PSIM, yang hasil simulasinya
dapat memberikan gambaran mendekati kondisi nyata. Namun karena
keterbatasan simulasi software PSIM yang tidak bisa mensimulasikan motor
switched reluctance 4 fasa, maka pada simulasi ini akan digunakan simulasi
motor switched reluctance 3 fasa. Pada simulasi ini masih menggunakan
kontrol analog, dimana hidup dan matinya saklar statis diatur oleh time delay.
Gambar 4.1 Skema rangkaian Switched Reluctance Motor.
Pada simulasi ini digunakan inverter 3 fasa dengan 6 saklar. Untuk
mengontrol posisi rotor dan kecepatan motor yang pertama dilakukan adalah
dengan mengkonversi nilai kecepatan motor yang dihasilkan oleh (RPM)
menjadi rad/s dimana nilainya nanti akan digunakan sebagai acuan posisi
sensor. Setelah itu nilai referensi dari posisi sensor akan digunakan untuk
mengatur duty cycle pada saklar inverter, yang pada akhirnya akan mengatur
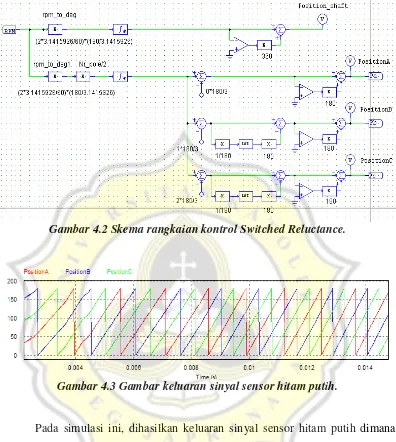
Gambar 4.2 Skema rangkaian kontrol Switched Reluctance.
Gambar 4.3 Gambar keluaran sinyal sensor hitam putih.
Pada simulasi ini, dihasilkan keluaran sinyal sensor hitam putih dimana
masing masing sensor berjarak 30 derajat, kemudian keluaran dari sensor hitam
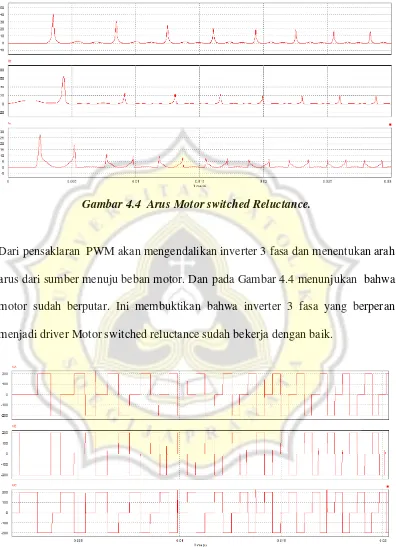
Gambar 4.4 Arus Motor switched Reluctance.
Dari pensaklaran PWM akan mengendalikan inverter 3 fasa dan menentukan arah
arus dari sumber menuju beban motor. Dan pada Gambar 4.4 menunjukan bahwa
motor sudah berputar. Ini membuktikan bahwa inverter 3 fasa yang berperan
menjadi driver Motor switched reluctance sudah bekerja dengan baik.
4.3 Putaran Switched Reluctance Motor 4 fasa
Pada dasarnya switched reluctance motor berputar setelah salah satu kutub
rotornya terinduksi oleh stator yang diberi tegangan, Dalam perancangan switched
reluctance motor 4 fasa ini, program yang digunakan adalah dengan melakukan
pergeseran fasa yang diperoleh dari pengendalian saklar statik pada inverter 4
fasa. Di mana setiap masing masing fasa akan tergeser 450. Dengan melakukan
pengendalian saklar statik pada mosfet maka stator motor dapat berubah
polaritasnya. Dengan memanfaatkan sensor photo dioda/ sensor hitam putih
yang akan menjadi indikator posisi rotor terhadap posisi stator yang akan
mengeluarkan sinyal sampling yang akan dibaca dan diolah DsPIC18F4012
untuk menentukan saklar statis mana yang akan bekerja. Pada switched
reluctance motor 4 fasa ini terdapat 8 step putaran yang terdiri seperti gambar
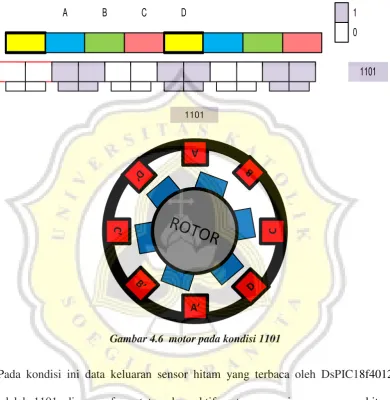
a. Step 1 pada kondisi 1101
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
A B C D 1
Gambar 4.6 motor pada kondisi 1101
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 1101, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator A, B, dan D akan menjadi aktif karena
masing-masing kutub stator mengenai sensor hitam pada rotor sehingga berlogika
“1” , dan fasa stator C berlogika “0” dikarenakan mengenai sensor putih pada
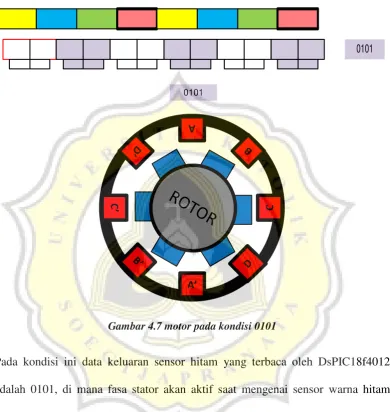
b. Step 2 pada kondisi 0101
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
0101
Gambar 4.7 motor pada kondisi 0101
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 0101, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator B, dan C menjadi aktif karena
masing-masing kutub stator mengenai sensor hitam pada rotor sehingga berlogika “1” ,
dan fasa stator A dan D berlogika “0” dikarenakan mengenai sensor putih pada
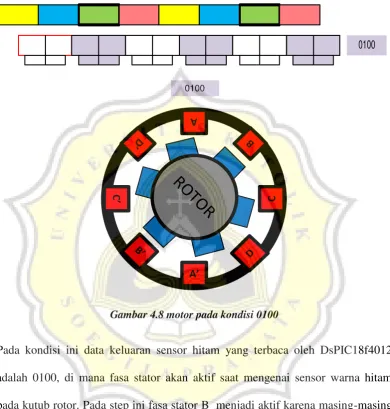
c. Step 3 pada kondisi 0100
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
0100
Gambar 4.8 motor pada kondisi 0100
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 0100, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator B menjadi aktif karena masing-masing
kutub stator mengenai sensor hitam pada rotor sehingga berlogika “1” , dan fasa
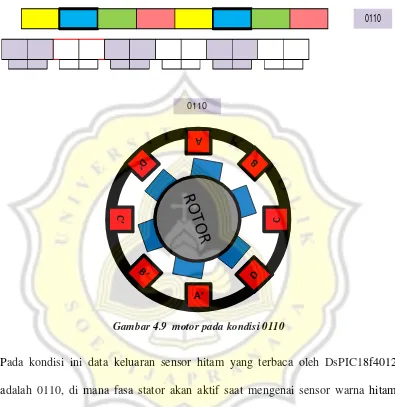
d. Step 4 pada kondisi 0110
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
0110
Gambar 4.9 motor pada kondisi 0110
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 0110, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator B, dan C menjadi aktif karena
masing-masing kutub stator mengenai sensor hitam pada rotor sehingga berlogika “1” ,
dan fasa stator A dan D berlogika “0” dikarenakan mengenai sensor putih pada
e. Step 5 pada kondisi 0010
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
0010
Gambar 4.10 motor pada kondisi 0010
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 0010, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator C menjadi aktif karena masing-masing
kutub stator mengenai sensor hitam pada rotor sehingga berlogika “1” , dan fasa
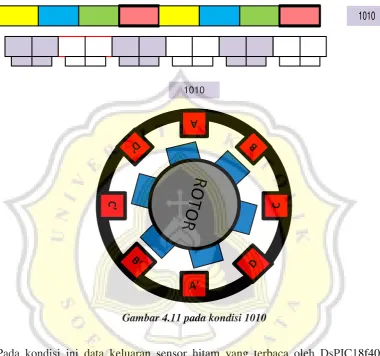
f. Step 6 pada kondisi 1010
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
1010
Gambar 4.11 pada kondisi 1010
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 1010, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator A dan C menjadi aktif karena
masing-masing kutub stator mengenai sensor hitam pada rotor sehingga berlogika “1” ,
dan fasa stator B dan D berlogika “0” dikarenakan mengenai sensor putih pada
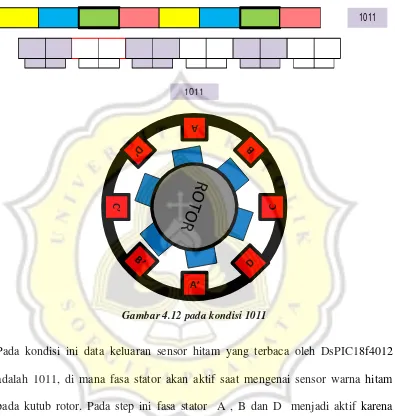
g. Step 7 pada kondisi 1011
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
1011
Gambar 4.12 pada kondisi 1011
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 1011, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator A , B dan D menjadi aktif karena
masing-masing kutub stator mengenai sensor hitam pada rotor sehingga berlogika
“1” , dan fasa stator C berlogika “0” dikarenakan mengenai sensor putih pada
h. Step 8 pada kondisi 1001
Dibawah ini adalah gambar posisi antara rotor, stator , dan sensor hitam putih.
1001
Gambar 4.13 pada kondisi 1001
Pada kondisi ini data keluaran sensor hitam yang terbaca oleh DsPIC18f4012
adalah 1001, di mana fasa stator akan aktif saat mengenai sensor warna hitam
pada kutub rotor. Pada step ini fasa stator A dan D menjadi aktif karena
masing-masing kutub stator mengenai sensor hitam pada rotor sehingga berlogika “1” ,
dan fasa stator B dan C berlogika “0” dikarenakan mengenai sensor putih pada
4.4 Pengujian Tegangan dan Arus dengan Osiloskop
Dari pengujian tegangan dan arus yang telah dilakukan pada Switched Reluctance
Motor 4 fasa, terlihat bahwa arus yang diperlukan sangat kecil sedangkan
tegangan yang dibutuhkan adalah Volt. Dalam hal ini arus yang digunakan tidak
terlalu besar sehingga menyebabkan mosfet dan elektromagnet tidak mengalami
panas yang berlebihan.
Pengujian program yang dilakukan dengan menggunakan osiloskop ini adalah
dengan cara melihat keluaran dari PORT E. Di mana port tersebut akan
mengeluarkan sinyal kotak 4 fasa, Hasil dari penyemplingan yang tergeser 450.
Gambar 4.15 Perbandingan antara Va,Vb,Vc,Vd 10x.
Gambar di atas adalah gambar hasil perbandingan antara tegangan keluaran fasa
A, B, C ,dan D dengan penguatan 10 kali pada Osiloscop.
Gambar 4.16 Perbandingan antara Va,Ia 10x 1x.
Gambar di atas adalah gambar hasil perbandingan antara Tegangan pada fasa A
dengan penguatan 10 kali dengan Arus keluaran Fasa A dengan penguatan 1 kali
Gambar 4.17 Perbandingan antara Vb, Ib 10x 1x.
Gambar di atas adalah gambar hasil perbandingan antara Tegangan keluaran fasa
B dengan penguatan 10 kali dan Arus keluaran Fasa B dengan penguatan 1 kali
pada Osiloscop.
Gambar 4.18 Perbandingan antara Vc, Ic 10x 1x.
Gambar di atas adalah gambar hasil perbandingan antara Tegangan keluaran fasa
C dengan penguatan 10 kali dan Arus keluaran fasa C dengan penguatan 1 kali
Gambar 4.19 Perbandingan antara Vd, Id 10x 1x.
Gambar di atas adalah gambar hasil perbandingan antara tegangan keluaran fasa D
dengan penguatan 10 kali dan Arus keluaran fasa D dengan penguatan 1 kali pada
Osiloscop.
4.5 Implementasi Switched Reluctance Motor 4 Fasa
Pada implementasi Switched Reluctance Motor 4 fasa ini, motor dirancang
sederhana mungkin agar motor dapat berputar secara baik dan terlihat rapi. Rotor
terbuat dari bahan Feromagnetic (inti Besi) yang tadinya berbentuk bulat
dimodifikasi menjadi kutub tonjol berjumlah 6 buah, sedangkan stator terbuat dari
belitan kawat yang berjumlah 8 buah yang disusun mengelilingi rotor. Untuk
sensor sendiri berjumlah 4 buah disusun pada sebuah kepingan CD yang diwarnai
Gambar 4.20 Desain Kontrol Motor Reluctance 4 fasa
4.6 Pembahasan
Pada pembuatan Switched Reluctance Motor 4 fasa ini, telah dilakukan pengujian dan
analisa agar Switched Reluctance Motor 4 fasa ini dapat berputar dengan baik. Ada
beberapa hal yang bisa mempengaruhi putaran atau kecepatan switched reluctance motor
ini. Pertama adalah bentuk konstruksi switched reluctance motor, jika jumlah stator
diperbanyak dan jumlah belitan pada stator semakin besar, maka akan menimbulkan fluks
magnetik yang besar pula karena fluks magnetik dan torka berbanding lurus maka
semakin besar fluks magnetik semakin besar pula torka yang akan dihasilkanya. Selain
stator , rotor pada switched reluctance motor juga berpengaruh semakin banyak rotor
yang digunakan maka semakin cepat pula switched reluctance motor ini berputar.
Selain dari konstruksi switched reluctance motor sendiri, hal yang penting lainya adalah
sensor dan program apa akan digunakan untuk pengontrolanya. Pada pembuatan
Switched Reluctance Motor 4 fasa ini penulis menggunakan sensor berupa photodioda
sensor/sensor hitam putih yang kemudian akan mengeluarkan sinyal 4 fasa yang akan
tergeser 450. Sebelum hasil dari keluaran photodioda sensor/sensor hitam putih digunakan
sebagai pacuan untuk membuat program sebelum itu terlebih dahulu kita harus membuat
sinyal sampling pergeseran sinyal 4 fasa untuk mendapatan data. Setelah itu data yang
diperoleh akan diolah menggunakan softwaremikro C for dsPIC. Program selain
digunakan untuk menggolah data dari photo sensor/sensor hitam putih memiliki kegunaan
lain yaitu untuk menentukan pensaklaran pada inverter 4 fasa. Dalam menentukan
frekuensi dan kecepatan motor ini digunakanlah program delay. Dalam pembuatan
switched reluctance motor 4 fasa ini, terdapat 8 step putaran motor yaitu saat kondisi
1101, 0101, 0100, 0110, 0010, 1010, 1011, dan 1001. Dengan mengontrol saklar statik
maka akan mendapatkan sinyal dari photodioda sensor/sensor hitam putih yang akan