BAB II
LANDASAN TEORI
2.1 Real Time Clock (RTC)
Real Time Clock (RTC) merupakan IC yang dibuat oleh perusahaan Dallas
Semikonduktor. IC ini memiliki Kristal yang dapat mempertahankan frekuensinya dengan baik. Real Time Clock (RTC) merupakan suatu chip (IC) yang memiliki fungsi sebagai penyimpan waktu dan tanggal. Ada dua buah jenis IC RTC yaitu:
1. DS1307 merupakan Real Time Clock (RTC) yang menggunakan jalur data parallel yang dapat menyimpan data-data detik, menit, jam, tanggal, bulan, hari dalam seminggu, da tahun valid hingga 2100. 56 byte,battery-backed, RAM nonvolatile
(NV) RAM untuk penyimpanan.
2. DS12C887 menggunakan jalur data seri yang memiliki register yang dapat menyimpan data detik,jam, menit, jam, tanggal, bulan dan tahun. RTC ini memiliki 128 lokasi RAM yang terdiri dari 15 byte untuk data waktu serta control, dan 113 byte sebagi RAM umum. RTC DS 12C887 menggunakan bus yang termultipleks untuk menghemat pin. Timing yang digunakan untuk mengakses RTC dapat menggunakan intel timing tau motorla timing. RTC ini juga dilengkapai dengan pin IRQ untuk kemudahan proses.
2.1.1 RTC Parallel (DS1307)
DS1307 merupakan Real Time Clock (RTC) dengan jalur data parallel yang memiliki interface serial Two-wire (12C), sinyal luaran gelombang-kotak terprogram (Programmable Squarewave), deteksi otomatis kegagalan-daya (power-fail) dan rangkaian switch, konsumsi daya kurang dari 500nA menggunakan mode baterai cadangan dengan operasional osilator. Tersedia fitur industri dengan ketahanan suhu : -40˚C hingga +85 ˚C. Tersedia dalam kemasan 8-pin DIP atau SOIC.
Berikut ini merupakan daftar pin untuk RTC Parallel DS1307 :
1. X1, merupakan pin yang digunakan untuk dihubungkan dengan X2
2. X2, berfungsi sebagai keluaran / output dari crystal yang digunakan. Terhubung juga dengan X1
3. V BAT , merupakan backup supply untuk serial RTC dalam menjalankan fungsi waktu
dan tanggal. Besarnya adalah 3 V dengan menggunakan jenis Lithium Cell atau sumber energi lain. Jika pin ini tidak digunakan maka harus terhubung dengan
Ground. Sumber tegangan dengan 48mAH atau lebih besar dapat digunakan sebagai cadangan energi sampai lebih besar dari 10 tahun, namun dengan persyaratan untuk pengoperasian dalam suhu 25 ˚C.
4. GND, berfungsi sebagai Ground.
5. SDA – Serial Data, berfungsi sebagai masukan/ keluaran (I/O) untuk I2C serial
interface. Pin ini bersifat open drain, oleh sebab itu membutuhkan eksternal pull up resistor.
6. SCL – Serial Data, berfungsi sebagai clock untuk input ke I2C dan digunakan untuk mensinkronisasi pergerakan data dalam serial interface. Bersifat open drain, oleh sebab itu membutuhkan eksternal pull up resistor.
7. SWQ/OUT
Sebagai square wafe/ Output Driver. Jika diaktifkan, maka akan menjadi 4 frekuensi gelombang kotak yaitu 1 Hz, 4 kHz, 8 kHz, 32 kHz sifat dari pin ini sama dengan sifat pin SDA dan SCL sehingga membutuhkan eksternal pull up resistor. Dapat dioperasikan dengan VCC maupun dengan V BAT .
8. VCC, merupakan sumber tegangan utama. Jika sumber tegangan terhubung dengan baik, maka peengaksesan data dan pembacaan data dapat dilakukan dengan baik. Namun jika backup supply terhubung juga dengan VCC, namun besar VCC di bawah V TP , maka pengaksesan data tidak dapat dilakukan.
2.1.2 RTC SERI DS12C887
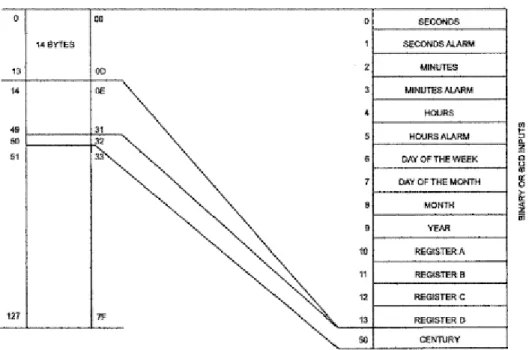
DS12C887 mempunyai 14 buah register yang terdiri dari 4 Register Kontrol dan 10 Register Data. Register Data sendiri terpisah menjadi register waktu dan
Register Alarm sebagaimana ditunjukkan pada gambar dibawah ini. Setelah
Register-register Kontrol diinisialisasi, maka data waktu ataupun alarm dapat dibaca atau ditulisi dengna cara mengakses register-register data yang bersangkutan.
Gambar 2. 2 Pemetaan alamat pada RTC DS12C887
2.2Hardware Arduino
Papan Arduino merupakan papan mikrokontroler yang berukuran kecil atau dapat diartikan juga dengan suatu rangkaian berukuran kecil yang didalamnya terdapat komputer berbentuk suatu chip yang kecil. Arduino didefinisikan sebagai sebuah platform
elektronik yang open source, berbasis pada software dan hardware yang fleksibel dan mudah digunakan, yang ditujukan untuk seniman, desainer, hobbies dan setiap orang yang tertarik dalam membuat objek atau lingkungan yang interaktif. Arduino pada awalnya dikembangkan di Ivrea, Italia.
Bahasa pemrograman arduino adalah bahasa pemrograman yang umum digunakan untuk membuat perangkat lunak yang ditanamkan pada arduino board. Pada Gambar dibawah dapat dilihat sebuah papan Arduino dengan beberapa bagian komponen didalamnya.
Pada hardware arduino terdiri dari 20 pin yang meliputi: a. 14 pin IO Digital (pin 0–13)
Sejumlah pin digital dengan nomor 0–13 yang dapat dijadikan input atau output yang diatur dengan cara membuat program IDE.
b. 6 pin Input Analog (pin 0–5)
Sejumlah pin analog bernomor 0–5 yang dapat digunakan untuk membaca nilai input yang memiliki nilai analog dan mengubahnya ke dalam angka antara 0 dan 1023.
c. 6 pin Output Analog (pin 3, 5, 6, 9, 10 dan 11)
Sejumlah pin yang sebenarnya merupakan pin digital tetapi sejumlah pin tersebut dapat diprogram kembali menjadi pin output analog dengan cara membuat programnya pada IDE.
Papan Arduino Uno dapat mengambil daya dari USB port pada komputer dengan menggunakan USB charger atau dapat pula mengambil daya dengan menggunakan suatu AC adapter dengan tegangan 9 volt. Jika tidak terdapat power supply yang melalui AC adapter, maka papan Arduino akan mengambil daya dari USB port. Tetapi apabila diberikan daya melalui AC adapter secara bersamaan dengan USB port maka papan Arduino akan mengambil daya melalui AC adapter secara otomatis.
2.3 Software Arduino
Software arduino yang digunakan adalah driver dan IDE, walaupun masih ada beberapa software lain yang sangat berguna selama pengembangan arduino. IDE atau
Integrated Development Environment suatu program khusus untuk suatu komputer agar dapat membuat suatu rancangan atau sketsa program untuk papan Arduino. IDE arduino merupakan software yang sangat canggih ditulis dengan menggunakan java. IDE arduino terdiri dari:
1. Editor Program
Sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa processing.
2. Compiler
Sebuah modul yang mengubah kode program menjadi kode biner bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa processing.
Sebuah modul yang memuat kode biner dari komputer ke dalam memori di dalam papan Arduino.
Dalam bahasa pemrograman arduino ada tiga bagian utama yaitu : a. Struktur Program Arduino
1) Kerangka Program
Kerangka program arduino sangat sederhana, yaitu terdiri atas dua blok. Blok pertama adalah void setup() dan blok kedua adalah void loop.
Blok Void setup () : Berisi kode program yang hanya dijalankan sekali sesaat setelah arduino dihidupkan atau di-reset. Merupakan bagian persiapan atau instalasi program.
Blok void loop() : Berisi kode program yang akan dijalankan terus menerus. Merupakan tempat untuk program utama.
2) Sintaks Program
Baik blok void setup loop () maupun blok function harus diberi tanda kurung kurawal buka “{“ sebagai tanda awal program di blok itu dan kurung kurawal tutup “}” sebagai tanda akhir program.
b. Variabel : Sebuah program secara garis besar dapat didefinisikan sebagai instruksi untuk memindahkan angka dengan cara yang cerdas dengan menggunakan sebuah varibel.
c. Fungsi : Pada bagian ini meliputi fungsi input output digital, input output analog, advanced I/O, fungsi waktu, fungsi matematika serta fungsi komunikasi. Pada proses Uploader dimana pada proses ini mengubah bahasa pemrograman yang nantinya dicompile oleh avr-gcc (avr-gcc compiler) yang hasilnya akan disimpan kedalam papan arduino. Avr-gcc compiler merupakan suatu bagian penting untuk software bersifat open source. Dengan adanya avr-gcc compiler, maka akan membuat bahasa pemrogaman dapat dimengerti oleh mikrokontroler. Proses terakhir ini sangat penting, karena dengan adanya proses ini maka akan membuat proses pemrogaman mikrokontroler menjadi sangat mudah. Berikut ini merupakan gambaran siklus yang terjadi dalam melakukan pemrogaman Arduino:
1. Koneksikan papan Arduino dengan komputer melalui USB port.
2. Tuliskan sketsa rancangan suatu program yang akan dimasukkan ke dalam papan Arduino.
3. Upload sketsa program ke dalam papan Arduino melalui kabel USB dan kemudian tunggu beberapa saat untuk melakukan restart pada papan Arduino.
4. Papan Arduino akan mengeksekusi rancangan sketsa program yang telah dibuat dan di-upload ke papan Arduino.
2.4 Masing-masing Sumber Daya dan Pin Tegangan Arduino
Arduino uno dapat diberi daya melalui koneksi USB (Universal Serial Bus) atau melalui power supply eksternal. Jika arduino uno dihubungkan ke kedua sumber daya tersebut secara bersamaan maka arduino uno akan memilih salah satu sumber daya secara otomatis untuk digunakan. Power supply external (yang bukan melalui USB) dapat berasal dari adaptor AC ke DC atau baterai. Adaptor dapat dihubungkan ke soket power pada arduino uno. Jika menggunakan baterai, ujung kabel yang dibubungkan ke baterai dimasukkan kedalam pin GND dan Vin yang berada pada konektor POWER.
Arduino uno dapat beroperasi pada tegangan 6 sampai 20 volt. Jika arduino uno diberi tegangan di bawah 7 volt, maka pin 5V akan menyediakan tegangan di bawah 5 volt dan arduino uno munkin bekerja tidak stabil. Jika diberikan tegangan melebihi 12 volt, penstabil tegangan kemungkinan akan menjadi terlalu panas dan merusak arduino uno. Tegangan rekomendasi yang diberikan ke arduino uno berkisar antara 7 sampai 12 volt.
2.5Servo
Motor servo pada dasarnya adalah motor dc dengan kualifikasi khusus yang sesuai dengan aplikasi “sevosing” didalam teknik kontrol. Dalam kamus Oxfrod istilah “servo” diartikan sebagai “ a mechanism that control a large mechanism”. Tidak ada sepisi baku yang disepakati untuk menyatakan bahwa suatu motor dc adalah motor servo. Namun secara umum dapat difinisikaan bahwa motor harus memilki kemampuan yang baik dalam mengatasi perubahan yang cepat dalam posisi dan kecepatan. Motor servo juga dikehendaki handal dalam beroperasi dalam lingkup torsi yang berubah - berubah. Berapa tipe motor yang dijual dengan paket rangkaian drivernya telah memiliki rangkaia control kecepatan yang menyatu didalamnya. Putaran motor tidak lagi berdasarkan tegangan supplay ke motor, namun berdasarkan tegangan input khusus yang berfungsi sebagai referensi kecepatan output. Motor servo merupakan motor yang diatur dan dikontrol menggunakan pulsa. Motor standard ini memiliki tiga posisi yaitu posisi 0˚, posisi 90 ˚, dan posisi 180˚. Poros motor servo biasanya dihubungkan dengan suatu mekanisme sehingga dapat membuat / mengontrol pergerakan roda depan pada sebuah mobil mainan. Pada saat poros pada posisi 0˚, maka roda mobil mainan akan bergerakan kekiri, jika
posisi poros pada 90˚, maka roda depan mobil maianan akan lurus, sedangkan jika posisi 180˚, maka roda depan mobil akan berbelok kekanan.
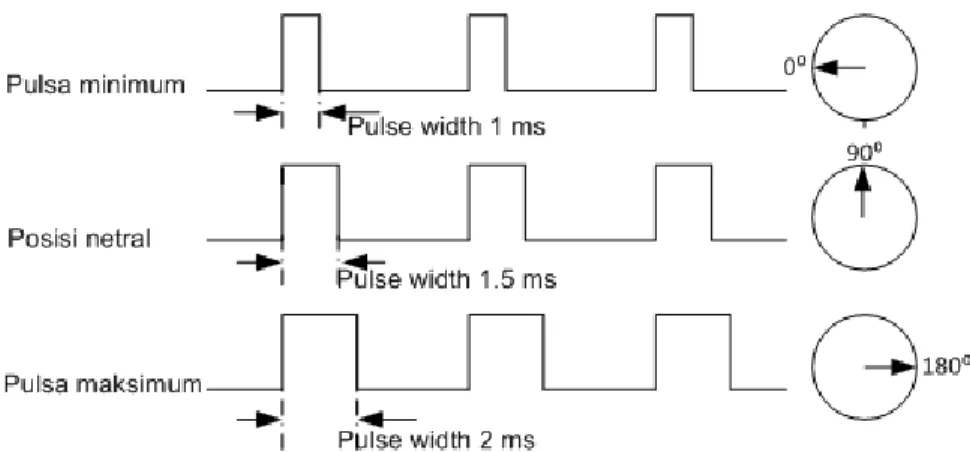
Gambar 2. 4 Pemberian Pulsa Untuk Perputaran Motor Servo
Karena ada tiga posisi utama seperti yang dijelaskan diatas maka dibuatlah secara khusus mengatur motor srvo tersebut, dengan cara memberikan pulsa digital dengan lebar yang berbeda – beda. Jika diberikan pulsa dengan lebar 1.5ms maka motor servo akan berputar 90˚, pulsa dengan 1.75ms akan membuat motor servo menuju 180˚, sedangkan pulsa dengan lebar 1.25ms akan membut motor servo bergerak menuju 0˚, motor servo tersebut disebut Motor servo standard yang memiliki batas, hal ini menyebabkan poros servo tidak berputar 360˚, sedangkan motor servo continous jika diberi puls 1.25ms akan berputar CW dan sedangkan jika diberi 1.75ms maka akan berputar CCW dan juga bila diberi 1,5ms motor servo kan diam tidak bergerak. Pada dasarnya motor servo continous
akan berputar 360˚.
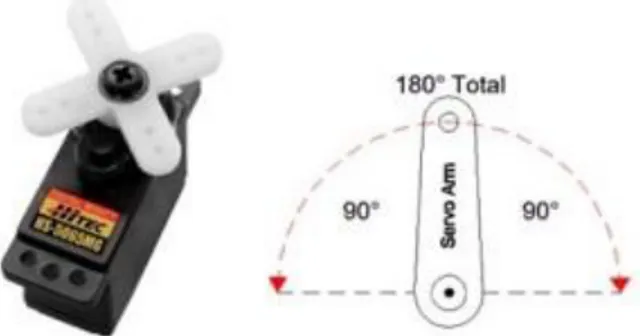
Berikut ini adalah gambar dari motor Servo Tower Pro SG90 yang digunakan dalam pembuatan alat ini.
2.5.1Keunggulan dan Kelemahan Motor Servo Keunggulan Motor Servo
Keunggulan dari penggunaan motor servo adalah :
1. Tidak bergetar dan tidak ber-resonansi saat beroperasi.
2. Daya yang dihasilkan sebanding dengan ukuran dan berat motor. 3. Penggunaan arus listik sebanding dengan beban yang diberikan.
4. Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
5. Tidak berisik saat beroperasi dengan kecepatan tinggi. Kelemahan Motor Servo
Kelemahan dari penggunaan motor servo adalah :
1. Tidak bergetar dan tidak ber-resonansi saat beroperasi.
2. Daya yang dihasilkan sebanding dengan ukuran dan berat motor. 3. Penggunaan arus listik sebanding dengan beban yang diberikan.
4. Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai.
5. Tidak berisik saat beroperasi dengan kecepatan tinggi.
2.5.2Aplikasi Motor Servo
Motor servo dapat dimanfaatkan pada pembuatan robot, salah satunya sebagai penggerak kaki robot. Motor servo dipilih sebagai penggerak pada kaki robot karena motor servo memiliki tenaga atau torsi yang besar, sehingga dapat menggerakan kaki robot dengan beban yang cukup berat. Pada umumnya motor servo yang digunakan sebagai pengerak pada robot adalah motor servo 180˚.
2.5.3Komponen Penyusun Motor Servo
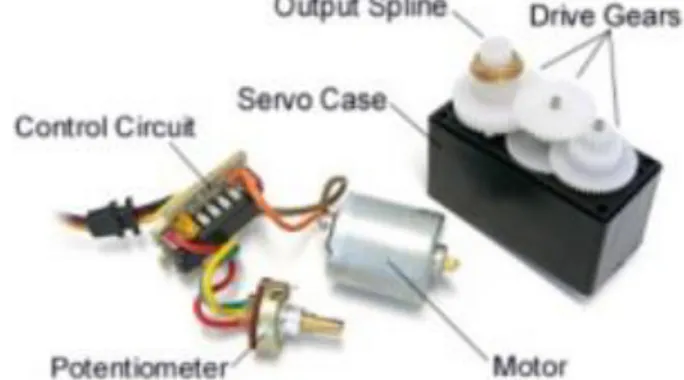
Motor servo pada dasarnya dibuat menggunakan motor DC yang dilengkapi dengan controler dan sensor posisi sehingga dapat memiliki gerakan 0o, 90o, 180o atau 360o. Berikut adalah komponen internal sebuah motor servo 180o.
Gambar 2. 7 Komponen Penyusun Motor Servo
Tiap komponen pada motor servo diatas masing-masing memiliki fungsi sebagai controler, driver, sensor, girbox dan aktuator. Pada gambar diatas terlihat beberapa bagian komponen motor servo. Motor pada sebuah motor servo adalah motor DC yang dikendalikan oleh bagian controler, kemudian komponen yang berfungsi sebagai sensor adalah potensiometer yang terhubung pada sistem girbox pada motor servo.
2.6LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat elektronik seperti televisi, kalkulator, ataupun layar komputer. Pada bab ini aplikasi LCD yang dugunakan ialah LCD dot matrik dengan jumlah karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. Adapun fitur yang disajikan dalam LCD ini adalah :
1. Terdiri dari 16 karakter dan 2 baris. 2. Mempunyai 192 karakter tersimpan. 3. Terdapat karakter generator terprogram 4. Dapat dialamati dengan mode 4-bit dan 8-bit 5. Dilengkapi dengan back light.
6. Tersedia VR untuk mengatur kontras.
7. Pilihan konfigurasi untuk operasi write only atau read/write.
8. Catu daya +5 Volt DC dan Kompatibel dengan DT-51 dan DT-AVR Low Cost Series
Gambar 2. 8 LCD (Liquid Crystal Display) Adapun konfigurasi dan deskripsi dari pin-pin LCD antara lain: 1. Pin 1 dihubungkan ke Gnd
2. Pin 2 dihubungkan ke Vcc +5V
3. Pin 3 dihubungkan ke bagian tegangan potensiometer 10KOhm sebagai pengatur kontras.
4. Pin 4 untuk membritahukan LCD bahwa sinyal yang dikirim adalah data, jika Pin 4 ini diset ke logika 1 (high, +5V), atau memberitahukan bahwa sinyal yang dikirim adalah perintah jika pin ini di set ke logika 0 (low, 0V).
5. Pin 5 digunakan untuk mengatur fungsi LCD. Jika di set ke logika 1 (high, +5V) maka LCD berfungsi untuk menerima data (membaca data). Dan fungsi untuk mengeluarkan data, jika pin ini di set ke logika 0 (low, 0V). Namun kebanyakan aplikasi hanya digunakan untuk menerima data, sehingga pin 5 ini selalu dihubungkan ke Gnd. 6. Pin 6 adalah terminal enable. Berlogika 1 setiap kali pengiriman atau pembaca data. 7. Pin 7 – Pin 14 adalah data 8 bit data bus (Aplikasi ini menggunakan 4 bit MSB saja,
sehingga pin data yang digunkan hanya Pin 11 – Pin 14).
8. Pin 15 dan Pin 16 adalah tegangan untuk menyalakan lampu LCD. Tabel 2. 1 Deskripsi Pin Pada LCD
Pin Deskripsi 1 Ground 2 Vcc 3 Pengatur kontras 4 “RS” Instruction/Register Select 5 “R/W” Read/Write LCD Registers 6 “EN” Enable
7-14 Data I/O Pins
15 Vcc
Cara kerja LCD (Liquid Crystal Display) pada aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari 4-bit atau 8-bit. Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu.
2.7Switch
Push button switch (saklar tombol tekan) adalah perangkat / saklar sederhana yang berfungsi untuk menghubungkan atau memutuskan aliran arus listrik dengan sistem kerja tekan unlock (tidak mengunci). Sistem kerja unlock disini berarti saklar akan bekerja sebagai device penghubung atau pemutus aliran arus listrik saat tombol ditekan, dan saat tombol tidak ditekan (dilepas), maka saklar akan kembali pada kondisi normal.
Gambar 2. 9 Switch
Sebagai device penghubung atau pemutus, push button switch hanya memiliki 2 kondisi, yaitu On dan Off (1 dan 0). Istilah On dan Off ini menjadi sangat penting karena semua perangkat listrik yang memerlukan sumber energi listrik pasti membutuhkan kondisi On dan Off. Karena sistem kerjanya yang unlock dan langsung berhubungan dengan operator, push button switch menjadi device paling utama yang biasa digunakan untuk memulai dan mengakhiri kerja mesin di industri. Secanggih apapun sebuah mesin bisa dipastikan sistem kerjanya tidak terlepas dari keberadaan sebuah saklar seperti push button switch atau perangkat lain yang sejenis yang bekerja mengatur pengkondisian On dan Off.
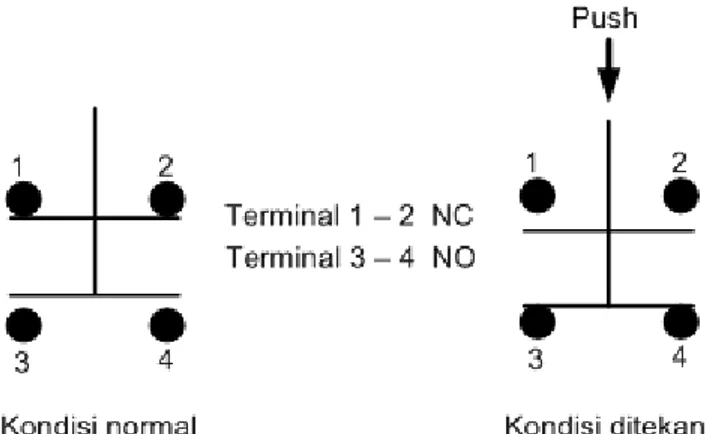
Gambar 2. 10 Kondisi PadaSwitch
Berdasarkan fungsi kerjanya yang menghubungkan dan memutuskan, push button switch mempunyai 2 tipe kontak yaitu NC (Normally Close) dan NO (Normally Open).