TUGAS MATA KULIAH
SISTEM INSTRUMENTASI ELEKTRONIKA
PERANCANGAN ALAT PENDETEKSI KETEBALAN PLASTIK PADA INDUSTRI PLASTIK DENGAN MENGGUNAKAN SENSOR LVDT
SECARA DIGITAL Oleh: ANALIS HIMMA 115060300111073 EDINAR VALIANT H 125060300111046 MUHAMMAD ILHAM A 125060300111049 SEPTIAN GUSONELA 125060307111003
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS BRAWIJAYA
MALANG 2014
KATA PENGANTAR
Di dalam era globalisasi, kemajuan teknologi sangatlah berpengaruh terhadap perkembangan sebuah indsutri. Inovasi dan kreatifitas akan mengubah cara pandang manusia terhadap teknologi. Khususnya di bidang industri plastik, pemanfaatan teknologi berskala besar sangatlah diperlukan, mengingat persaingan dan kompetisi akan sebuah produk telah meningkat jauh dari tahun – tahun sebelumnya.
Salah satu contoh nyata pemanfaatan teknologi di dalam industri plastik adalah untuk mengukur ketebalan plastik yang dihasilkan. Sering plastik yang dihasilkan memiliki tekstur ketebalan yang berbeda, tergantung pada bahan dan proses produksinya. Tetapi plastik yang dihasilkan dituntut memiliki ketebalan yang sama sesuai standart yang berlaku.
Karena itulah, guna menyelesaikan tugas dari mata kuliah SISTEM INSTRUMENTASI ELEKTRONIKA kami menyusun makalah ini untuk menyelesaikan permasalahan di atas. Makalah yang kami susun berjudul, ―Perancangan Alat Pendeteksi Ketebalan Plastik Pada Industri Plastik Dengan Menggunakan Sensor LVDT Secara Digital‖. Makalah ini berisi tentang sistem yang dapat memonitoring ketebalan suatu plastik secara digital dimana berbasis pada mikrokontroller.
Manusia tidak ada yang sempurna di dunia ini, sehingga tidak luput dari kesalahan, demikian juga dalam perancangan dan pembuatan makalah ini. Sehingga diharapkan para pembaca dapat memberi masukan dan kritik agar jika terdapat kekurangan dari makalah ini, maka makalah ini dapat lebih disempurnakan lagi. Terima kasih.
Malang, April 2014
BAB I PENDAHULUAN
1. Latar Belakang
Hal yang paling menantang dalam indutri plastik, selain kualitas dan mutu produk , adalah menghasilkan ketebalan plastik yang sama satu sama lain sesuai standart yang ada. Untuk itu membutuhkan alat pendeteksi yang sangat presisi.
Banyak sekali sensor untuk mengukur perpindahan tingi atau tebal yang bisa dipakai. Sensor displacement tersebut memiliki keunggulan dan kekurangan masing – masing. Penggunaan sensor Linear Variable Displacement Tansformer (LVDT) sebagai tranduser karena memiliki tingkat presisi dan ketahanan yang andal.
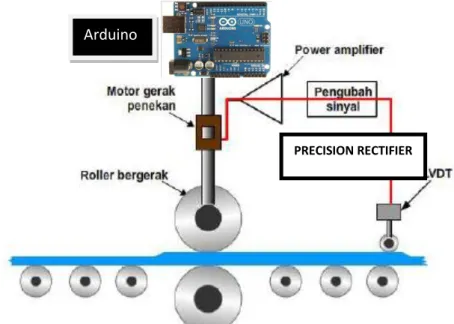
Proses untuk mendeteksi akan diubah menjadi digital agar lebih mudah diproses untuk proses lebih lanjutnya. Misalnya, ketebalan plastik yang diukur oleh LVDT ternyata lebih tebal dari standart yang ada, maka hasil pendeteksian oleh sensor akan diproses secara digital dan diolah oleh mikrokontroler agar menggerakan motor penekan roller sehingga daya tekan bertambah dan menyebabkan ketebalan plastik berkurang. Demikian juga sebaliknya, apabila ketebalan plastik yang terdeteksi di bawah batas ketebalan.
Karena itu, untuk menyelesaikan permasalahan ini dibutuhkanlah sebuah sistem yang dapat memonitoring level ketebalan plastik secara digital. Sistem ini adalah alat pendeteksi ketebalan plastik menggunakan sensor LVDT secara digital. Untuk mengetahui berapa ketebalan plastik digunakan sensor LVDT yang nantinya keluaran dari sensor akan diolah oleh Arduino Uno menggunakan ATMEGA 328P dan ditampilkan dengan LCD sebagai hasil monitoring ketebalan plastik.
2. Tujuan dan Manfaat
Merancang prototype alat pendeeksi ketebalan plastik pada industri plastik menggunakan sensor LVDT secara digital agar dihasilkan pembacaan ketebalan plastik yang lebih presisi untuk proses lebih lanjut.
3. Batasan Masalah
Pembahasan akan diarahkan pada proses pemantauan ketebalan plastik dengan menggunakan sensor LVDT secara digital. Sensor LVDT ini untuk mengetahui berapa ketebalan plastik, sensor ini menerima masukan berupa sinyal analog yang kemudian keluarannya di proses menjadi sinyal digital oleh ADC. Keluaran dari ADC akan diolah pada mikrokontroler dan ditampilkan pada LCD sebagai hasil pembacaan. Masalah pemilihan mikrokontroller , motor penggerak dan perancangan software dari mikrokontroller lalu ditampilkan ke LCD juga tidak dibahas. Selain itu perancangan osilator tidak dijelaskan juga dalam makalah ini.
4. Metodologi Penelitian Studi Literatur :
- Mempelajari LVDT sebagai sensor perpindahan. - Mencari data komponen yang akan digunakan. Perencanaan dan Pembuatan Sistem :
- Perencanaan dan pembuatan rangkaian sistem minimum Arduino Uno dengan memakai ATMEGA 328P, yang merupakan pengontrol dari kegiatan sistem secara keseluruhan.
- Perencanaan pembuatan rangkaian pengkondisi sinyal yang memanfaatkan transduser LVDT dan Analog to Digital Converter (ADC).
Pengujian Sistem
- Pengujian respon ADC, untuk mengetahui keluaran dari LVDT yang sudah diolah pada rangkaian pengkondisi sinyal, sesuai dengan hasil perhitungan.
BAB II
TINJAUAN PUSTAKA
2. 1. LVDT (Linear Variable Differential Transformer)
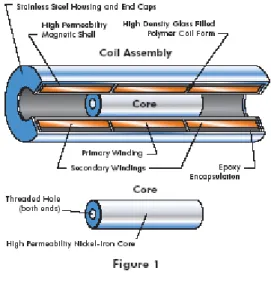
Perangkat ini merupakan transduser elektromekanis dimana perpindahan posisi mekanis disebabkan pada pergerakan inti besi. LVDT adalah suatu alat elektromekanikal yang dapat menghasilkan keluaran elektrikal yang sebanding dengan pergeseran intinya. Dengan kata lain, transduser ini dipakai untuk melihat perubahan sinyal listrik yang secara linier sebanding dengan perubahan kedudukan Transduser transformator diferensial variabel (LVDT) linier digunakan pada system pengukuran dan kontrol. Karena resolusi yang sangat haIus, ketelitian tinggi dan stabilitas yang baik maka transduser ini tepat dipakai pada simpangan dengan langkahpendek, alat pengukur presisi. Beberapa pengukur besaran fisika seperti, tekanan, beban dapat diukur dengan defleksi/simpangan mekanik maka sudah tentu LVDT dapat digunakan sebagai sensor pada alat-alat ukur tersebut. LVDT dipakai pula untuk elemen dasar dari extensiometer, indikator, permukaan/level. Pada numerical controlled machine (mesin dikontrol numerik) dan creep-testing machine (mesin pengetes rayapan) banyak memakai LVDT pula.
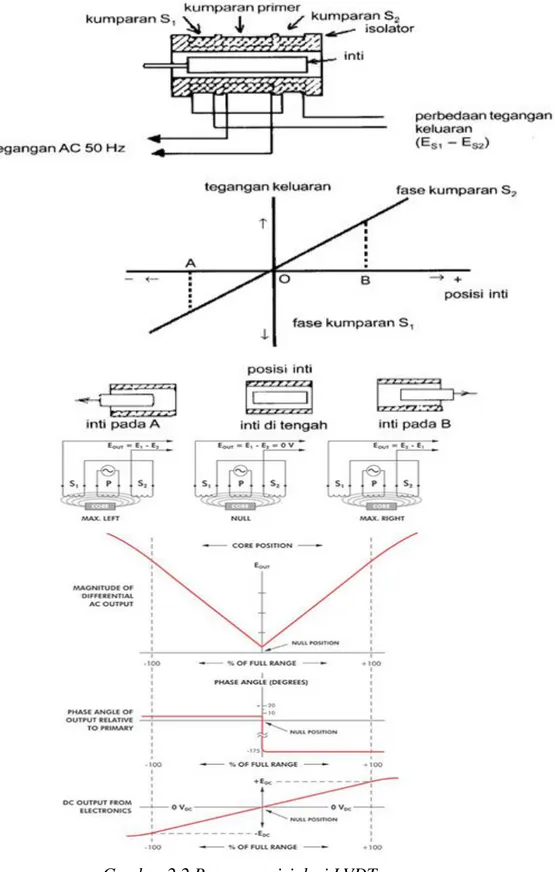
Konstruksi dari LVDT dapat ditunjukkan dalam Gambar 2.1, terdiri atas kumparan primer dan dua kumparan sekunder pada inti besi yang bergerak bebas di dalamnya. LVDT terdiri dari sebuah kumparan primer dan dua buah kumparan sekunder yang identik, kumparan diberi jarak secara aksial dan digulung pada pembentuk kumparan berbentuk silinder, inti maknit berbentuk batang ditempatkan di tengah susunan kumparan dan dapat bergerak. Inti maknit/besi ini sebagai jalan yang dilalui fluksi medan maknit yang menghubungkan kumparan-kumparan itu. Simpangan yang akan diukur disalurkan ke inti maknit itu memakai penghubung yang sesuai. Bila kumparan primer diberi tegangan bolak-baIik (AC carrier wave signal) pada kedua kumparan terinduksi tegangan, harga yang dihasilkan tergantung pada letak inti maknit terhadap titik tengah susunan kumparan
Gambar 2.1 LVDT
Pada suatu kedudukan tertentu, amplitudo yang diinduksikan pada kumparan sekunder pertama sama besar dengan keluaran pada kumparan sekunder kedua. Karena kumparan sekunder tersebut saling dihubungkan seri dengan arah gulungan berlawanan, maka keluaran tegangan pada rangkaian sekunder berbeda fasa 180 derajat. Sehingga pada pusat kedudukannya, keluaran akan 0 volt.
Polaritas tegangan keluaran yang dihasilkan oleh gerakan inti. Sebagai contoh, bila bergerak kebawah, kumparan S2, besar tegangan induksi lebih besar dari S1. Besar tegangan ditentukan oleh seberapa jauh inti bergerak. Jika inti besi digerakkan dari posisi kesetimbangan, tegangan yang diinduksikan pada satu kumparan sekunder akan naik, tapi tegangan turun pada kumparan sekunder yang lain. Hal ini menyebabkan adanya perbedaan tegangan yang tergantung dari posisi inti besi di dalam kumparan. Respon posisi dari sebuah LVDT ditunjukkan dalam Gambar 2.2.
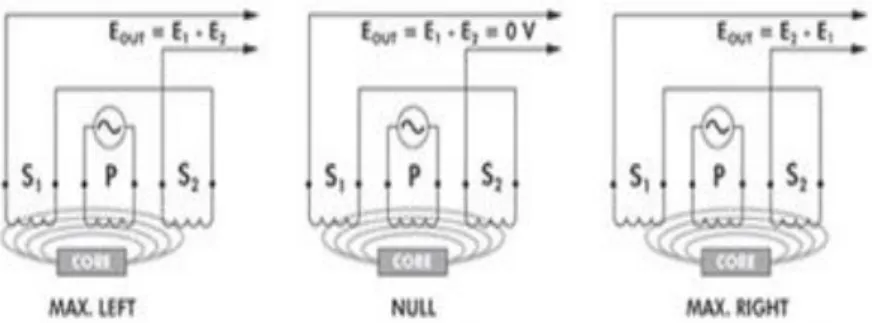
Dalam penggunaannya, LVDT dapat memakai beberapa bentuk sumber AC untuk menggerakkan lilitan primernya. Sumber penggerak/pemicunya biasanya adalah gelombang sinus dengan frekuensi berkisar antara 20Hz-20kHz. Karena pemicunya adalah gelombang sinus AC maka keluaran dari LVDT ini juga merupakan gelombang sinus AC. Sebelum masuk ke perangkat selanjutnya maka output (keluaran) dari LVDT ini harus diubah ke DC terlebih dahulu. Prinsip kerja LVDT ditunjukkan dalam Gambar 2.3
Gambar 2.3. Prinsip Kerja LVDT
Gambar 2.4 menunjukkan rangkaian ekivalen . Bila resistansi total di kumparan sekunder adalah :
Dan untuk kumparan primer :
Sedangkan untuk kumparan sekunder :
Dari 2 rumus diatas didapatkan :
Sehingga tegangan keluarannya
Dalam posisi tengah, dimana letak inti besi adalah M2=M1, maka E0= 0 V sesuai penjelasan sebelumnya.
Keuntungan LVDT untuk sensor displacement ialah :
1. Mekanik: Kesederhanaan desain dan mudah dalam fabrikasi dan instalasi, jangkauan luas, gerakan bebas geseran pada inti maka resolusinya tidak terbatas, konstruksi kokoh; gaya untuk mengoperasikan dapat diabaikan (berat inti sangat kecil), kemampuan bekerja pada temperatur tinggi. 2. Listrik: Tegangan output linier dan fungsi kontinu pada simpangan
mekanik (ke liniaran lebih baik dari 0,25%). Sensitivitas tinggi (2 mV /Volt/10 mikron pada eksitasi 4 KHz); output impedansi rendah (100 ohm); kemampuan bekerja pada frekuensi luas (50 Hz hingga 20 - 24 KHz);
2.2. Operational Amplifier (Op-Amp)
Operational Amplifier (Op-Amp) merupakan salah satu komponen elektronika yang paling banyak digunakan dalam bidang elektronika. Baik di bidang analog maupun digital. Simbol dari op-amp ditunjukkan dalam Gambar 2.4. Hal ini karena Op-Amp sangat mudah digunakan dan sangat efisien. Dalam
rangkaian elektronika yang rumit menjadi sederhana dengan menggunakan Op-Amp.
Gambar 2.5. Simbol Op-Amp
Pada op-amp terdapat satu terminal keluaran, dan dua terminal masukan. Terminal masukan yang diberi tanda (-) dinamakan terminal masukan pembalik (inverting), sedangkan terminal masukan yang diberi tanda (+) dinamakan terminal masukan tak membalik (non inverting).
2.3. Instrumentation Amplifier (Penguat Instrumentasi)
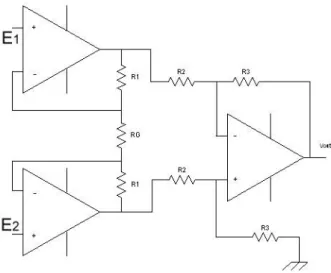
Penguat instrumentasi adalah penguat yang paling bermanfaat, cermat dan serbaguna yang ada pada saat ini. Penguat ini dibuat dari tiga penguat operasional dan tujuh resistor seperti ditunjukkan dalam Gambar 2.5. Untuk menyederhanakan analisis rangkaian, perlu diketahui bahwa penguat instrumentasi sesungguhnya dibuat dengan menghubungkan dua buah penguat penyangga dengan sebuah penguat diferensial dasar.
Op Amp A3 dan dua resistor R2 dan dua resistor R3 membentuk sebuah penguat deferensial dasar dengan gain sebesar R3/R2. Seperti yang terlihat dalam Gambar 3, ada satu buah resistor lagi yang digunakan untuk menyetel penguatan, yaitu RG. Persamaan tegangan adalah sebagai berikut:
2 1
2 3 12
1
E
E
R
R
R
R
V
G out
Ciri-ciri penguat instrumentasi dapat diringkas sebagai berikut :
1. Penguatan tegangannya, dari masukkan diferensial (E1 - E2) ke keluaran berujung tunggal, disetel oleh satu resistor.
2. Resistansi masukkan dari kedua masukkannya sangat tinggi dan tidak berubah jika penguatannya berubah.
3. Vo tidak tergantung pada tegangan bersama E1 maupun E2, melainkan hanya pada perbedaan antara keduanya.
2.4. Analog to Digital Converter 0804
Analog to Digital Converter adalah sebuah piranti elektronika yang dirancang untuk dapat mengubah sinyal analog manjadi sinyal digital. Menggunakan ADC karena pengontrolan dilakukan menggunakan kontroller elektronika (mikrokontroller, komputer, atau plc), seihngga sinyal analog yang berasal dari sensor harus terlebih dahulu diubah menjadi sinyal digital agar dapat dibaca dan diolah oleh komputer. Pada perancangan ini menggunakan IC ADC 0804 yang dapat memenuhi kebutuhan dari rangkaian yang akan dibuat.
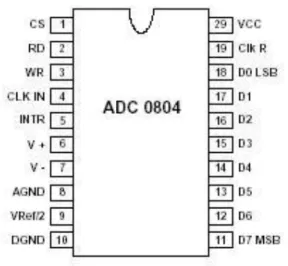
ADC adalah suatu rangkaian yang dapat mengubah tegangan analog menjadi data digital. Input tegangan analog deferensial dapat meningkatkan common mode rejection dan pengaturan offset tegangan input nilai nol. Tegangan referensi dapat diatur untuk mendekodekan berapapun tegangan input pada resolusi 8 bit. ADC yang dipakai adalah jenis ADC 0804 yang merupakan resolusi 8 bit,merupakan 20 pin dan bekerja pada mode kerja free running. Mode ini dipilih karena waktu konversi adc jauh lebih cepat terhadap tingkat perubahan resistansi dari sensor. Keluaran ADC 0804 ini berada di port 11-18 yang akan masuk ke mikrokontroller. Gambar 2.6 menunjukkan pin-pin ADC0804.
Gambar 2.7. Pin ADC0804
Keterangan :
WR : (input) pin ini digunakan untuk memulai konversi tegangan analog menjadi data digital, dengan memberikan pulsa logika ‖ 0 ‖ pada pin ini.
INT : (output) pin ini digunakan sebagai indikator apabila ADC talah selesai menkonversikan tegangan analog menjadi digital, dengan mengeluarkan logika ―0‖.
Vin : Tegangan analog input deferensial, input Vin (+) dan Vin (-) merupakan tegangan deferensial yang akan mengambil nilai selisih dari kedua input. Dengan memanfaatkan input Vin maka dapat dilakukan offset tegangan nol pada ADC
Vref : Tegangan referensi dapat diatur sesuai dengan input tegangan pada Vin (+) dan Vin (-), Vref = Vin/2
Clock : Clock untuk ADC dapat diturunkan dari clock CPU atau RC eksternal dapat ditambahkan untuk memberikan generator dari dalam. Clock IN menggunakan schmitt triger.
CS : agar ADC dapat aktif melakukan konversi data maka input Chip Select harus diberi logika low. Data output akan berada pada kondisi three state apabila CS mendapatkan logika high.
RD : agar data ADC dapat dibaca oleh sistem mikroprocesor maka pin RD harus diberi logika low.
2.5. Mikrokontroler ATMEGA 328P
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) arsitektur CISC (Completed Instruction Set Computer). Mikrokontroller ini memiliki beberapa fitur antara lain :
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
4. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
6. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
8. Master / Slave SPI Serial interface.
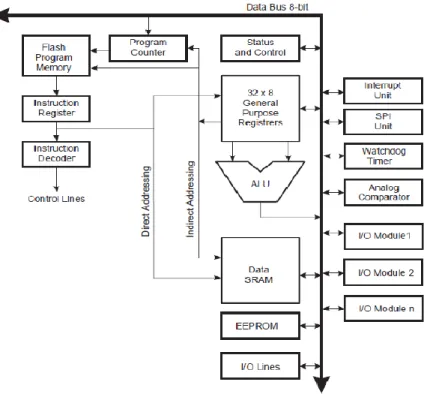
Mikrokontroller ATmega 328 memiliki arsitektur Harvard, yaitu memisahkan memori untuk kode program dan memori untuk data sehingga dapat memaksimalkan kerja dan parallelism. Instruksi – instruksi dalam memori program dieksekusi dalam satu alur tunggal, dimana pada saat satu instruksi dikerjakan instruksi berikutnya sudah diambil dari memori program. Konsep inilah yang memungkinkan instruksi – instruksi dapat dieksekusi dalam setiap satu siklus clock. 32 x 8-bit register serba guna digunakan untuk mendukung operasi pada ALU ( Arithmatic Logic unit ) yang dapat dilakukan dalam satu siklus. 6 dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tak langsung untuk mengambil data pada ruang memori data. Ketiga register pointer 16-bit ini disebut dengan register X (
gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ).
Hampir semua instruksi AVR memiliki format 16-bit. Setiap alamat memori program terdiri dari instruksi 16-bit atau 32-bit. Selain register serba guna di atas, terdapat register lain yang terpetakan dengan teknik memory mapped I/O selebar 64 byte. Beberapa register ini digunakan untuk fungsi khusus antara lain sebagai register control Timer/ Counter, Interupsi, ADC, USART, SPI, EEPROM, dan fungsi I/O lainnya. Register – register ini menempati memori pada alamat 0x20h – 0x5Fh. Berikut ini adalah tampilan architecture ATmega 328 :
Gambar 2.9. Nama Pin-pin Atmega 328P 2.6. Arduino
Arduino adalah sebuah board mikrokontroller yang berbasis ATmega328. Arduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan tombol reset. Arduino dapat dikoneksikan dengan komputer menggunakan kabel USB.
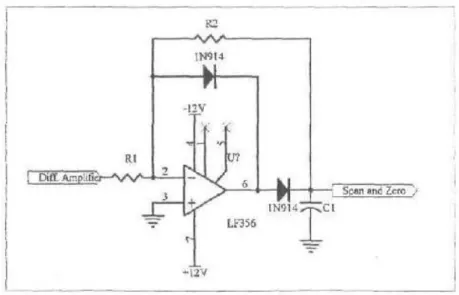
2.7. Precision Rectifier
Rangkaian ini berfungsi untuk mengubah sinyal AC menjadi sinyal DC. Rangkaian ini dirancang untuk mengatasi keterbatasan diode silicon yaitu tidak mampu menyearahkan tegangan dibawah 0,6 V.
Gambar 2.11. Rangkaian Precision Rectifier Cara kerjanya :
1. Untuk siklus positif :
saat E positif, maka D1 akan bekerja, menyebabkan tegangan keluaran op-Amp , VOA,menjadi negatif sebesar voltage drop dioda (0,6 V).
Hal ini memaksa D2 menjadi bias mundur
Tegangan keluaran rangkaian Vo sama dengan 0 karena arus masukan I mengalir melalui D1.
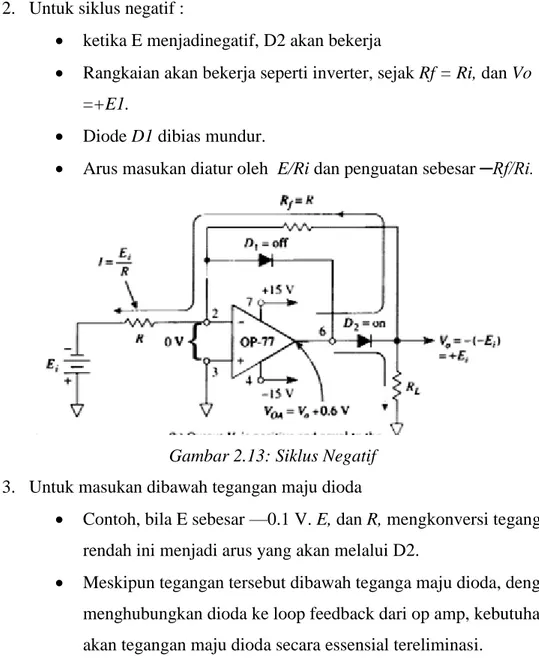
2. Untuk siklus negatif :
ketika E menjadinegatif, D2 akan bekerja
Rangkaian akan bekerja seperti inverter, sejak Rf = Ri, dan Vo =+E1.
Diode D1 dibias mundur.
Arus masukan diatur oleh E/Ri dan penguatan sebesar ─Rf/Ri.
Gambar 2.13: Siklus Negatif 3. Untuk masukan dibawah tegangan maju dioda
Contoh, bila E sebesar —0.1 V. E, dan R, mengkonversi tegangan rendah ini menjadi arus yang akan melalui D2.
Meskipun tegangan tersebut dibawah teganga maju dioda, dengan menghubungkan dioda ke loop feedback dari op amp, kebutuhan akan tegangan maju dioda secara essensial tereliminasi.
Sehingga gelombang hasil penyearah adalah Half Wave, seperti pada gambar berikut:
BAB III PERANCANGAN
3.1 Prinsip Kerja dan Diagram Blok
Prinsip kerja sistem secara keseluruhan adalah sebagai berikut. Arduino Uno ATmega 328P adalah kontroler utama dari sistem keseluruhan. Secara umum, diagram blok rangkaian dapat dilihat pada Gambar 3. 1 berikut.
Oscilator RPS Rectifier
ADC 0804
AT89C51 LCD 16X2 LVDT
Gambar 3.1 Diagram Blok Sistem Secara Keseluruhan
Arduino Arduino PRECISION RECTIFIER
RPS2
PRECISION RECTIFIERFungsi masing-masing blok adalah sebagai berikut: 1. Oscilator
Oscilator disini digunakan untuk membangkitkan gelombang sinus dengan frekuensi 3 KHz untuk membangkitkan gelombang pada sensor LVDT.
2. LVDT
Linear Voltage Differential Transformator (LVDT) adalah merupakan sensor perpindahan dalam hal ini sensor LVDT digunakan untuk
mengetahui level volume dengan memanfaatkan pergeseran dari batang ferit yang berada di dalam coil.
3. Rectifier
Rangkaian ini digunakan untuk menyearahkan sinyal keluaran dari LVDT yang berupa gelombang sinus
4. RPS
Rangkaian ini berfungsi untuk menguatkan sinyal yang diperoleh dari keluaran sensor LVDT yang sudah disearahkan oleh precision rectifier . Rangkaian yang digunakan adalah penguat instrumentasi.
5. ADC 0804
ADC digunakan untuk merubah sinyal masukan yang berupa sinyal analog menjadi keluaran digital, yang selanjutnya akan diolah mikrokontroler.
6. Mikrokontroler
Mikrokontroler yang digunakan adalah tipe ATMEGA 328P menggunakan board Arduino uno.
7. LCD
Digunakan sebagai penampil data dari keluaran mikrontroller .
Perancangan sistem pendeteksi level ketebalan keras dengan menggunakan sensor LVDT adalah dengan cara memanfaatkan sensor LVDT/sensor pergeseran untuk mengetahui tebal plastik. Keluaran sensor LVDT yang masih berupa sinyal AC disearahkan rangkaian rectifier, kemudian dikuatkan oleh RPS supaya sesuai dengan masukan ADC. Sinyal DC yang masih
berupa sinyal analog ini akan diubah ke sinyal digital melalui rangkaian ADC 0804 untuk selanjutnya diolah oleh mikrokontroller untuk ditampilkan ke LCD 2x16.
Pada kesempatan kali ini, tidak semua bagian dari sistem tersebut yang akan dijelaskan. Hanya sebatas pada sensor ketinggian level plastik, Rangkaian Pengkondisi Sinyal, ADC, mikrokontroler, serta tampilan yang merupakan rangkaian elektrik dari sistem. Mengenai rangkaian mekanik dari sistem tidak akan dibahas disini dan perancangan software mikrokontroller untuk menampilkan data ke LCD tidak akan dibahas.
3.2 Spesifikasi dan Perancangan Sensor Perancangan LVDT
Secara umum LVDT bekerja karena adanya perbedaan medan magnet. Medan magnet ini muncul karena adanya gerakan inti magnet yang dimasukkan ke dalam kumparan. Semakin dalam inti magnet dimasukkan ke dalam kumparan maka nilai medan magnet yang di hasilkan akan semakin besar. LVDT bekerja pada frekuensi rendah (antara 20 - 25.000 Hz) dan gerakannya linear terhadap masukan. Rangkaian ekivalen dari sensor LVDT dapat dilihat pada Gambar 3.2
Gambar 3.2. Rangkaian Ekivalen Sensor LVDT
Suatu LVDT pada dasarnya terdiri dari sebuah kumparan primer, dua buah kumparan sekunder, dan inti dari bahan feromagnetik. Kumparan- kumparan tersebut dililitkan pada suatu selongsong, sedangkan inti besi ditempatkan didalam rongga selongsong tersebut. Selongsong ini terbuat dari bahan non-magnetik.
kumparan sekunder dililitkan disetiap sisi kumparan primer. Kedua kumparan sekunder ini dihubungkan seri secara berlawanan dengan jumlah lilitan yang sama.
Besar tegangan keluaran LVDT bergantung kepada posisi inti. Pada saat posisi inti. Pada saat posisi inti besi ditengah, GGL yang diinduksi oleh kumparan sekunder 1 dan 2 sama besar. Tetapi karena kedua kumparan sekunder dihubungkan seri secara berlawanan maka tegangan keluaran akan sama dengan nol. Jika inti besi kita geser kearah atas maka kumparan sekunder 1 akan mendapat rapat fluks yang lebih tinggi dibandingkan dengan kumparan sekunder 2. Akibatnya GGL induksi pada kumparan sekunder 1 akan lebih besar daripada kumparan sekunder 2. Tegangan keluaran yang dihasilkan merupakan selisih tegangan kedua kumparan sekunder Hubungan antara tegagan keluaran dan pergesaran inti LVDT adalah linier pada selang jarak tertentu. Hubungan antara tegangan keluaran U dengan posisi inti besi x linier saat inti berada ditengah selongsong, dan tidak linier saat inti berada di pinggir-pinggir selongsong. Sensor LVDT ini akan mengeluarkan tegangan 0,2 volt pada frekuensi 3 kHz. Sehingga perancangan ADC0804 akan sangat sulit untuk tegangan yang kecil, maka dibutuhkan penguatan sebelum masuk ADC0804.
3.3. Rangkaian Precision Rectifier
Keluaran LVDT berupa sinyal AC, maka dari itu untuk menuju ke rangkaian berikutnya, harus diubah ke DC terlebih dahulu. Karena dibutuhkan perubahan yang presisi, maka pengubahannya sebaiknya tidak hanya memakai rangkaian diode silicon biasa. Kita dapat menggunakan rangkaian Precision Rectifier.
Gambar 3.3 Rangkaian Precision Rectifier
Penguatan dibuat agar 1x agar nilai asli dari LVDT tetap dan tidak berubah sehingga tidak perlu dikuatkan lagi.
Dengan nilai komponen: R1 = 1200 Ω Rf = 1200 Ω C = 33 µF Dioda 1N914 Av = Rf / R1 = 1200 / 1200 = 1
3.4 Spesifikasi dan Perancangan Rangkaian Pengkondisi Sinyal 1
Ketebalan kertas yang akan diditeksi beragam jenisnya. Mulai dari yang paling tipis hingga yang agak tebal. Sebagai contoh dalam system instrumentasi ini dinginkan ketebalan paling minimum dari sebuah kertas adalah 0,5 mm (alumunium foil ) hingga ketebalan maksimumnya sekitar 6 mm (kertas karton) . Sensor LVDT pada frekuensi 3 kHz memiliki sensitivitas sekitar 2 mV/mm. Ternyata pada sensor LVDT terdapat offset , bilaman tegangan keluarannya 0 di ketinggian 0,5 mm, bukan saat 0mm tepat. Oleh karena itu keluaran ADC yang
menyatakan penskalaan ketinggian kertas, pada software nya perlu ditambah nilai offset 0,5 mm.
Karena pada saat 0,5 mm, (tinggi minimum) keluaran LVDT adalah 0 V. Sehingga saat mencapai ketinggian 6mm, maka keluaran LVDT adalah (6-0,5)x2 mV/mm = 11mv .
Pada jangkauan ketinggian ini LVDT akan mengeluarkan tegangan berkisar 0 mV- 11 mV, akan dibutuhkan rangkaian pengkondisi sinyal untuk mengubah menjadi kisaran 0-5 V. Untuk mendapat spesifikasi tersebut dilakukan perhitungan sebagai berikut :
mV mm mV mm S tinggi V V mm mV mm S tinggi V maks maks T T 11 / 2 ) 5 , 0 6 ( ) 5 , 0 ( 0 / 2 ) 5 , 0 5 , 0 ( ) 5 , 0 ( ) ( min (min)
Untuk ADC dengan n = 8 bit dan tegangan referensi VR= 5V, membutuhkan tegangan masukan dalam kisaran antara:
V
V
V
V
V
V
R n n maks i i17
,
6
2
,
6
2
1
2
2
1
2
dan
2
,
1
8 8 ) ( (m in)
Rangkaian yang diperlukan dapat diperoleh dari persamaan yang menyatakan hubungan keluaran-masukan sebagai berikut :
Vi = mVT + B
Dari spesifikasi yang diketahui, maka dapat diperoleh : 0 = m (0) + B
6.17578125 = m (0,011) + B
Jika kedua persamaan ini kita selesaikan secara serentak, maka akan diperoleh :
m = 454,54 V dan B =0 V, sehingga diperoleh persamaan fungsi alihnya :
Vi = 454,54 VT
Fungsi alih yang diperoleh tersebut dapat direalisasikan dengan menggunakan penguat instrumentasi dengan cara mengatur nilai resistor-resistornya. Pemberian nilai resistor dilakukan dengan cara sebagai berikut:
Mula-mula R2 dan R3 deberi nilai secara berturut-turut 1 kΩ dan R1 = 100 kΩ, sehingga RG dapat diperoleh dari persamaan :
m= 1+ G G R x R R 2 100000 1 2 1 454,54= G R 2000000 RG = 440,0052
Gambar rangkaian keseluruhan dari RPS ditunjukkan Gambar 3.3
Gambar 3.4. Gambar Rangkaian Penguat Instrumentasi
RG R1 R2 R3 R3 R2’’ 1 V Vi VT
3.5 Spesifikasi dan Perancangan Rangkaian Pengkondisi Sinyal 2
Ketebalan plastik yang akan diditeksi beragam jenisnya. Mulai dari yang paling tipis hingga yang agak tebal. Sebagai contoh dalam system instrumentasi ini dinginkan ketebalan paling minimum dari sebuah plastik adalah 0,05 mm hingga ketebalan maksimumnya sekitar 6 mm. Sensor LVDT pada frekuensi 3 kHz memiliki sensitivitas sekitar 2 mV/mm. Ternyata pada sensor LVDT terdapat offset , bilamana tegangan keluarannya 0 di ketinggian 0,5 mm, bukan saat 0 mm tepat. Oleh karena itu keluaran ADC yang menyatakan penskalaan ketinggian plastik, pada software nya perlu ditambah nilai offset 0,5 mm.
Karena pada saat 0,5 mm, (tinggi minimum) keluaran LVDT adalah 0 V. Sehingga saat mencapai ketinggian 6mm, maka keluaran LVDT adalah (6-0,5)x2 mV/mm = 11mv .
Pada jangkauan ketinggian ini LVDT akan mengeluarkan tegangan berkisar 0 mV- 11 mV, akan dibutuhkan rangkaian pengkondisi sinyal untuk mengubah menjadi kisaran 0-5 V. Untuk mendapat spesifikasi tersebut dilakukan perhitungan sebagai berikut :
mV mm mV mm S tinggi V V mm mV mm S tinggi V maks maks T T 11 / 2 ) 5 , 0 6 ( ) 5 , 0 ( 0 / 2 ) 5 , 0 5 , 0 ( ) 5 , 0 ( ) ( min (min)
Untuk ADC dengan n = 8 bit dan tegangan referensi VR= 5V, membutuhkan tegangan masukan dalam kisaran antara:
V
V
V
V
V
V
R n n maks i i4.980
5
2
1
2
2
1
2
dan
0
8 8 ) ( (m in)
Rangkaian yang diperlukan dapat diperoleh dari persamaan yang menyatakan hubungan keluaran-masukan sebagai berikut :
Vi = mVT + B
Dari spesifikasi yang diketahui, maka dapat diperoleh : 0 = m (0) + B
Jika kedua persamaan ini kita selesaikan secara serentak, maka akan diperoleh :
m = 452,727 V dan B =0 V, sehingga diperoleh persamaan fungsi alihnya :
Vi = 452,727VT
Fungsi alih yang diperoleh tersebut dapat direalisasikan dengan menggunakan penguat instrumentasi dengan cara mengatur nilai resistor-resistornya. Pemberian nilai resistor dilakukan dengan cara sebagai berikut:
Mula-mula R2 dan R3 deberi nilai secara berturut-turut 1 kΩ dan R1 = 100 kΩ, sehingga RG dapat diperoleh dari persamaan :
m= 1+ G G R x R R 2 100000 1 2 1 451,727= G R 2000000 RG = 442,74
Gambar 3.4. Gambar Rangkaian Penguat Instrumentasi
3.5. Rangkaian Analog to Digital Converter (ADC)
Data hasil pengukuran transduser LVDT masih berupa besaran analog yang harus diubah ke bentu digital sehingga dapat diolah oleh mikrokontroler. Untuk itu, digunakan ADC 0804 dengan resolusi 8 bit. ADC 0804 ini memiliki 2 buah channel input analog diferensial. Besaran analog yang akan dikonversikan dihubungkan ke Vin+, sedangkan Vin- dihubungkan ke ground.
Resolusi tegangan pada masukan ADC:
volt
V
V
i Rn0,0195
2
5
2
8
Resolusi tegangan pada masukan rangkaian pengkondisi sinyal:
mV A V VT i 0,043 727 , 452 0195 , 0
Resolusi pada masukan sensor (sama dengan resolusi pengukuran displacement): RG R1 R2 R3 R3 R2’’ 1 V Vi VT
mm S V T T 0215 , 0 2 0,043
Jadi setiap perubahan satu Bit ADC, ketebalan yang diukur naik dari kelipatan 0,0215 mm. serta tegangannya berubah naik dari kelipatan 0,0195 V.
Nilai decimal keluaran ADC adalah :
n
V
n
V
V
NilaiADC
i maks R maks i2
5
2
( ) ) (
Ternyata pada sensor LVDT terdapat offset , bilaman tegangan keluarannya 0 di ketinggian 0,5 mm, bukan saat 0mm tepat. Oleh karena itu keluaran ADC yang menyatakan penskalaan ketebalan plastik, pada software nya perlu ditambah nilai offset 0,5 mm.
Misal, nilai decimal keluaran ADC adalah 0, maka ketebalan plastik yang diwakilinya bukan 0 mm, tetapi 0,5 mm. Bila nilai decimal keluaran ADC adalah 1, maka ketebalan yang diwakili bukan 0,0215 mm, tetapi 0,0215 + 0,5 mm = 0,5215 mm. Sehingga dapat dirumuskan :
Ketebalan sesungguhnya = (NilaiADC x 0,0215mm) + 0,5 mm
ADC 0804 membutuhkan suatu tegangan referensi sebesar Vcc/2 yaitu sebesar 2,5V. Pada ADC ini terdapat rangkaian osilator internal untuk mengaktifkannya. Frekuensi osilator ditentukan oleh rangkaian eksternal R dan C. Nilai R yang digunakan sebesar 10kΩ dan nilai C sebesar 150 pF. Sehingga didapatkan nilai frekuensi osilatornya :
Untuk memulai konversi, maka diberikan sinyal write pada pin WR. Hasil konversi akan dibaca oleh P1 dari mikrokontroler ATMega 328P.
BAB IV PENUTUP
KESIMPULAN
Dengan penggunaan ADC dan sensor LVDT maka hasil pembacaan ketebalan plastik terbaca secara digital. Secara umum, sistem dapat berjalan dengan baik, namun ada sedikit error dikarenakan kemungkinan adanya error pada saat proses perhitungan LVDT.
SARAN
Pada saat merancang dan membuat sistem ini, khususnya LVDT, sebaiknya dilakukan secara seksama dan dilakukan perhitungan yang benar-benar matang. Sehingga tidak terjadi error, dan sistem dapat berjalan sesuai dengan yang diinginkan.
DAFTAR PUSTAKA
----.2002. ATMega 328P Datasheet. http://www.atmel.com diakases tanggal 10 Oktober 2012.
Bejo, Agus. 2008. C dan AVR. Yogyakarta : Graha Ilmu.
Pallas-Areny, R & Webster,JG, 1991. Sensor and Signal Conditioning. John Wiley & Sons,Inc..
Siwindarta, Ponco. 2012. Sistem Instrumentasi Elektronika. www.elektro. brawijaya.ac.id/ponco. Malang: Universitas Brawijaya.