MIKROKONTROLLER ATMEGA 8535
SKRIPSI
SEVNI ASNITA PURBA 150821026
DEPARTEMENT S1 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATRA UTARA
MEDAN 2017
MIKROKONTROLLER ATMEGA 8535
SKRIPSI
Diajukan Untuk Melengkapi Tugas Dan Memenuhi Syarat mencapai gelar Sarjana Sains
SEVNI ASNITA PURBA 150821026
DEPARTEMENT S1 FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATRA UTARA
MEDAN 2017
PERSETUJUAN
Judul : Perancangan Dan Pembuatan Penghitung Dan Pemisah Jeruk Berdasarkan Ukuran Berbasis Mikrokontroller Atmega 8535
Kategori : Skripsi
Nama : Sevni Asnita Purba
Nomor Induk Mahasiswa : 150821026
Program Studi : Sarjana (S1) Fisika
Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disetujui di
Medan, 2017
Diketahui/disetuji oleh
Departemen Fisika FMIPA USU Pembimbing Ketua,
Dr. Perdinan Sinuhaji, MS Dr. Bisman Perangin-angin, M.Eng.Sc.
NIP.195903101987031002 NIP. 195609181985031002
PERNYATAAN
PERANCANGAN DAN PEMBUATAN PENGHITUNG DAN PEMISAH JJERUK BERDASARKAN UKURAN BERBASIS MIKROKONTROLLER
ATMEGA 8535
SKRIPSI
Saya mengakui bahwa skripsi iniadalah karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 2017
Sevni Asnita Purba 150821026
PENGHARGAAN
Terpuji dan agunglah namaMu Tuhan Yesus Kristus buat segala apa yang diberikan untuk penulis. Kekuatan, kesehatan, petunjuk, hikmat dan kebijaksanaan, waktu, dimana selama proses pengerjaan tugas akhir ini rintangan yang dihadapi oleh penulis dapat diselesaikan. Bukan karena kekuatan dan kemampuan penulis tetapi karena berkat, kasih dan karunia Tuhan sajalah sehingga penulis dapat menyelesaikan tugas akhir ini, dalam waktu yang ditetapkan. Ucapan terima kasih penulis sampaikan kepada orang – orang yang menjadi bagian hidup penulis, Terima kasih yang sebesar – besarnya kepada
1. Bapak Dr. Perdinan Sinuhaji, MS selaku Ketua Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Dr. Bisman Perangin-angin M.Eng,Sc selaku dosen pembimbing penulis yang telah banyak meluangkan waktu untuk memberikan bimbingan, motivasi dan ide/masukan dalam menyempurnakan skripsi menjadi lebih baik.
3. Bang Johaiddin Saragih, S.Si.M.Si sebagai staf pegawai departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara yang memberikan bimbingan kepada penulis untuk menyempunarkan Skripsi ini.
4. Seluruh staf Pengajar / Pegawai program studi studi Fisika Ekstensi.
5. Kepada Abang Laidi dan Pak Ridwan yang telah memberikan bantuan berupa ilmu dan motivasi dalam menyelesaikan Skripsi ini.
6. Kepada kedua orang tua saya Bapak Aguslan Ilawadi Purba dan Ibu Dumasinta Sinaga S.Pd.K beserta kakak Julva Ida Rohdearni Purba dan adik Dermawan Pertuadi Purba yang telah memberikan kasih sayang, motivasi, materi, kerja kerasnya, serta mendoakan penulis agar dipermudah dalam menyelesaikan skripsi ini.
7. Kepada Abang Lyri M Simorangkir yang telah memberikan dukungan, materi, serta mendoakan penulis agar dipermudah dalam menyelesaikan skripsi ini.
8. Kepada Fitri Suryati Hutauruk Amd sebagai teman saya yang senantiasa memberikan motivasi, dukungan serta membantu dalam menyelesaikan skripsi ini.
9. Rekan Fisika Ekstensi 2015 terkusus Irda Florista Tarigan, Rudi Ansyah, Deva Yuliana Raja Guk-Guk, Ristauli Margaretta Nababan yang telah memberikan motivasi, dan dukungan dalam menyelesaikan skripsi ini.
Penulis menyadari bahwa skripsi ini masih jauh dari sempurna, untuk itu penulis mengharapkan saran dan kritik yang membangun demi penyempurnaan isi dan analisa yang disajikan.Akhir kata, semoga tulisan ini bermanfaat bagi pembaca.
Medan, 2017
Penulis
“ PERANCANGAN DAN PEMBUATAN PENGHITUNG DAN PEMISAH JERUK BERDASARKAN UKURAN BERBASIS MIKROKONTROLLER
ATMEGA8535 ”
ABSTRAK
Telah dirancang penghitung dan pemisah jeruk berdasarkan ukuran berbasis mikrokontroller Atmega8535. Perancangan sistem dimaksud agar dapat membantu meringankan pekerjaan petani dengan dibuat sebuah alat berupa conveyor belt yang dilengkapi dengan motor dc sebagai penggerak belt konveyor, dan motor servo sebagai penggerak preject, juga sensor ajustable infrared sebagai mendeteksi ukuran jeruk. Sistem ini akan memberikan data hasil pengukuran buah yang terbagi menjadi 3 jenis ukuran, dilanjutkan dengan proses penghitungan dan pensortiran buah . Pada perancangan alat ini mikrokontroller Atmega8535 akan mendeteksi sensor ukur sehingga kita dapat mengetahui apakah ada jeruk yang melawati sensor. Selain itu mikrokontroller Atmega8535 akan mengambil data ukuran jeruk yang telah dibaca oleh sensor ukur. Ketika ukuran jeruk telah diketahui maka secara otomatis motor preject akan diaktifkan melalui rangkaian driver. Motor preject akan diaktifkan pada saat ukuran jeruk tergolong ukuran besar dan sedang. Sedangkan untuk ukuran jeruk yang kecil, secara otomatis akan dibiarkan sehingga sampai kepenampungan ujung konveyor. Pada saat sebuah jeruk terdeteksi ukurannya, maka perhitungan jumlah jeruk akan ditampilkan di layar LCD. Data yang ditampilkan adalah jumlah jeruk yang sesuai dengan ukuran masing-masing. Untuk menghentikan sistem dilakukan dengan cara menekan tombol stop. Dengan demikian proses keseluruhan kerja sistem dapat bekerja dengan baik sesuai yang diharapkan.
Kata Kunci : Sensor Adjustable Infrared, Conveyor belt, Mikrokontroler.
DESIGN AND MANUFACTURE CITRUS COUNTERS AND SEPARATORS BASED ON MICROCONTROLLER BASED ON ATMEGA 8535
ABSTRACT
It has been designed citrus counters and separators based on microcontroller based on Atmega8535. The design of the system in order to help ease the work of farmers with a tool made of a conveyor belt equipped with dc motor as a conveyor belt drive, and servo motor as a propeller preject, also sensor ajustable infrared as a detect the size of oranges. This system will provide data of fruit measurement results divided into 3 types of sizes, followed by the process of counting and sorting the fruit. In designing this tool Atmega8535 microcontroller will detect the measuring sensor so that we can find out whether there are oranges that pass the sensor. In addition, Atmega8535 microcontroller will take data orange size that has been read by the measuring sensor. When the size of the orange is known then automatically the motor preject will be activated through the driver circuit. Motor preject will be activated when orange size is large and medium size. As for the size of a small orange, it will automatically be left so that the end of the conveyor conveyor. When an orange is detected in size, the calculation of the orange count will be displayed on the LCD screen. The data displayed is the number of oranges that match the size of each. To stop the system is done by pressing the stop button. Thus the overall process of system work can work well as expected.
Keywords: Adjustable Infrared Sensor, Conveyor belt, Microcontroller.
DAFTAR ISI
Halaman
PERSETUJUAN i
PERNYATAAN ii
PENGHARGAAN iii
ABSTRAK v
ABSTRACT vi
DAFTAR ISI vii
DAFTAR TABEL x
DAFTAR GAMBAR xi
DAFTAR LAMPIRAN xii
BAB 1 PENDAHULUAN
1. 1 Latar Belakang 1
1. 2 Tujuan Penelitian 2
1. 3 Rumusan Masalah 2
1. 4 Batasan Masalah 2
1. 5 Manfaat Penelitian 2
1. 6 Metodologi Penulisan 2
1.7 Sistematika Penulisan 3
BAB 2 TINJAUAN PUSTAKA
2.1 Mikrokontroller Atmega8535 4
2.1.1Fitur Mikrokontroller Atmega8535 4
2.2 Motor DC 5
2.2.1 Jenis-jenis Motor DC 6
2.2.2 Motor DC Tipe Seri 6
2.2.3 Motor DC Tipe Komponen/Gabungan 6
2.2.4 Prinsip Dasar Cara Kerja 6
2.3 LCD (Liquid Crystal Display) 7
2.4 Adjustable Infrared Sensor 8
2.5 Motor Servo 9
2.6 Bascom - AVR 11 2.6.1 Kontruksi Bahasa Basic Pada Bascom Avr 12
2.6.2 Pengarah Preprosesor 12
2.6.3 Aritmatika dan Rasional 13
2.6.4 Operator Logika 14
2.7 Relay 14
BAB 3 METODE PENELITIAN
3.1 Diagram Blok Rangkaian 15
3.2 Rancang Gambar Rngkaian 16
3.2.1 Rangkaian LCD 16X2 16
3.2.2 Rangkaian Sensor Adjustable Infrared 17 3.2.3 Rngkaian Mikrokontroller Atmega8535 18
3.2.4 Rangkaian Tombol 19
3.2.5 Rangkaian Motor Servo 20
3.2.6 Rangkaian Motor DC 21
3.2.7 Rangkaian Regulator 7805 21
3.2.8 Rangkaian Stepdown LM2596 22
3.3 Flowchart Sistem 23
BAB 4 HASIL PEMBAHASAN
4.1 Pengujian Tegangan Output Power Supply 24 4.2 Pengujian Tegangan Output Modul Regulator LM2596 24 4.3 Pengujian Tegangan Output IC Regulator 7805 25 4.4 Pengujian Tegangan Output Tombol Start dan Stop 26 Pada Saat Ditekan
4.5 Pengujian Tegangan Output Tombol Start dan Stop 27 Pada Saat Tidak Ditekan
4.6 Pengujian Tegangan Output L298 Ke Motor DC 28 4.7 Pengujian Tegangan Output Sensor Pada Saat Mendeteksi 29 Jeruk Dan Tidak Mendeteksi Jeruk
4.8 Pengujian Dan Analisa Software 31
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan 38
5.2 Saran 38
DAFTAR PUSTAKA LAMPIRAN
DAFTAR TABEL
Halaman
Tabel 1. Data Aritmatika 13
Tabel 2. Data Rasional (Perbandingan) 14
Tabel 3. Operator Logika 14
Tabel 4. Hasil pengukuran dan pengujian tinggi jeruk berdasarkan ukuran 30
DAFTAR GAMBAR
Halaman
Gambar 1. Mikrokontroller ATMega8535 4
Gambar 2. Motor Sederhana 5
Gambar 3. Medan Magnet Yang Membawa Arus Mengelilingi 7 Konduktor
Gambar 4. LCD 16x2 8
Gambar 5. Adjustable infrared sensor 9
Gambar 6. Model Fisik dan Pin-Pin Motor servo 9
Gambar 7. Mode Pensinyalan motor servo 10
Gambar 8. Contoh Posisi dan Waktu Pemberian Pulsa 10 Gambar 9. Tampilan Jendela Program BASCOM-AVR 12
Gambar 10. Relay 14
Gambar 11. Diagram Blok Rangkaian 15
Gambar 12. Rangkaian LCD 16X2 16
Gambar 13. Rangkaian Sensor Adjustable Infrared 17 Gambar 14. Rangkaian Mikrokontroller Atmega8535 18
Gambar 15. Rangkaian Tombol 19
Gambar 16. Rangkaian Motor Servo 20
Gambar 17. Rangkaian Motor DC 21
Gambar 18. Rangkaian Regulator 7805 21
Gambar 19. Rangkaian Stepdown LM2596 22
Gambar 20. Flowchart Sistem 23
Gambar 21. Pengujian Tegangan Output Power Supply 24 Gambar 22. Pengujian Tegangan Output Modul Regulator LM2596 25 Gambar 23. Pengujian Tegangan Output IC Regulator 7805 25 Gambar 24. Pengujian Tegangan Output Tombol Stop Pada Saat Ditekan 26 Dan Tidak Ditekan
Gambar 25. Pengujian Tegangan Output Tombol Start pada saat Ditekan 27 Dan Tidak Ditekan
Gambar 26. PengujianTegangan Output Mikrokontroller ke Modul 27
L298 ke PD.6
Gambar 27. PengujianTegangan Output Mikrokontroller ke Modul 28 L298 ke PD.7
Gambar 28. Pengujian Tegangan Output L298 ke Motor DC 28 Gambar 29. Pengujian Tegangan Output Sensor Pada Saat Mendeteksi 29 Jeruk Dan Tidak Mendeteksi Jeruk Ukuran Besar
Gambar 30. Pengujian Tegangan Output Sensor Pada Saat Mendeteksi 29 Jeruk Dan Tidak Mendeteksi Jeruk Ukuran Sedang
Gambar 31. Pengujian Tegangan Output Sensor Pada Saat Mendeteksi 30 Jeruk Dan Tidak Mendeteksi Jeruk Ukuran Kecil
DAFTAR LAMPIRAN
Nomor Tabel Halaman
1. Program Keseluruhan 40
2. Rangkaian Lengkap 46
3. Data sheet
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Perkembangan pada zaman modern ini telah mengalami peningkatan yang amat pesat dari ilmu pengetahuan dan teknologi. Keinginan untuk menciptakan sesuatu yang canggih dan otomatis semakin meningkat dengan tujuan agar dapat tercipta berbagai kemudahan yang dapat membantu berbagai kegiatan manusia.
Kehidupan sehari-hari masih banyak sistem yang masih mempergunakan tenaga manusia sehingga membutuhkan waktu yang relative lebih lama. Keadaan seperti ini menimbulkan dampak yang besar pada semua bidang kehidupan manusia terutama dalam sektor pertanian, peranan sektor pertanian menyediakan lapangan kerja bagi sebagian besar penduduk, hasil dari pertanian akan dijual di supermarket atau toko buah menggunakan jasa petani agar buah yang dijual dalam keadaan segar dan berstandar. Namun ada kendala yang dihadapi oleh petani buah pada saat proses sortir sehingga penghambat lamanya proses packing buah.
Sistem sortir buah yang dihadapi oleh petani, terkhusus adalah paman saya sendiri yang masih menggunakan proses pemisahan buah secara manual, sehingga membutuhkan waktu yang lama dan tidak akurat dalam proses memisahkan buah jika proses tersebut dilakukan dengan otomatis akan membutuhkan waktu yang lebih singkat, akurat dan mempermudahkan petani untuk memisahkan buah serta keuntungan dalam sektor pertanian buah akan semakin besar. Berdasarkan persoalan tersebut, penulis tertarik untuk membuatsuatu alat dan penulisan Tugas Skripsi dengan judul “Perancangan Dan Pembuatan Penghitung dan Pemisah Jeruk Berdasarkan Ukuran Berbasis Mikrokontroller Atmega8535”.
Perancangan sistem dimaksud agar dapat membantu meringankan pekerjaan petani dengan dibuat sebuah alat berupa conveyor belt yang dilengkapi dengan motor dc sebagai penggerak belt konveyor, dan motor servo sebagai penggerak preject, juga sensor ajustable infrared sebagai mendeteksi ukuran jeruk. Sistem ini akan memberikan data hasil pengukuran buah yang terbagi menjadi 3 jenis ukuran, dilanjutkan dengan proses penghitungan dan pensortiran buah .
1.2 Tujuan Penelitian
1. Memahami sistem perancangan dan pembuatan penghitung dan pemisah jeruk berdasarkan ukuran berbasis mikrokontroller atmega 8535.
2. Mengaplikasikan sensor ukur (adjustable infrared) untuk simulasi penghitung dan pemisah jeruk berdasarkan ukuran secara otomatis.
1.3 Rumusan Masalah
1. Bagaimana sensor adjustable mendeteksi ukuran jeruk?
2. Bagaimana sistem kerja dari motor preject?
3. Bagaimana sistem kerja dari driver?
1.4 Batasan Masalah
Dalam perencanaan penulisan ini terdapat beberapa batasan masalah sebagai berikut:
1. Buah yang digunakan adalah jeruk local (medan) dengan jumlah buah sebanyak 15 buah.
2. Sistem dipengaruhi oleh struktur mekanis.
3. Menggunakan MikrokontrollerAtmega 8535 sebagai pusat kendali sistem.
4. Menggunakan sensor ajustable infrared sebagai pendeteksi ukuran jeruk.
5. Memanfaatkan Motor dc sebagai penggerak konveyor.
6. Alat ini tidak berlaku untuk pengukururan bentuk jeruk yang cacat, bentuknya seperti gepeng.
1.5 Manfaat Penelitian
1. Mempermudah sistem sortir jeruk.
2. Mempersingkat waktu dan memberikan hasil perhitungan yang akurat dalam sistem sortir jeruk.
1.6 Metodeologi Penulisan 1. Metode literatur
Pada metode ini penulis mencari berbagai referansi beberapa buku dan literature yang berhubungan dengan pembuatan alat
2. Metode perancanaan
Metode ini dilakukan dengan cara merancang, membuat dan menguji alat untuk mendapatkan prinsip kerja sistem penghitung dan pemisah buah jeruk 3. Metode penelitian
Metode penelitian penulis melakukan pengamatan dan pengujian mengenai rancangan program untuk mendapatkan hasil pengukuran.
1.7 Sistematika Penulisan
Untuk mempermudah pembahasan dan penulisan laporan ini, penulis membuat susunan bab – bab yang membentuk laporan ini dalam sistematika penulisan laporan dengan urutan sebagai berikut
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, rumusan masalah, batasan masalah, dan sistematika penulisan.
BAB 2 LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian dan bahasa program yang digunakan, serta karakteristik dari komponen-komponen pendukung.
BAB 3 PERANCANGAN DAN PEMBUATAN
Bab ini berisikan tentang proses perancangan dan pembuatan alat. Mulai dari perancangan dan pembuatan sistem hardware atau software.
BAB 4 HASIL DAN PEMBAHASAN
Dalam bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat, penjelasan mengenai rangkaian-rangkaian yang digunaan, penjelasan mengenai program yang diisikan ke mikrokontroller ATMega8535.
BAB 5 PENUTUP
Dalam bab ini menjelaskan kesimpulan dan saran alat ataupun data yang dihasilkan dari alat. Bab ini juga merupakan akhir dari penulisan laporan proyek ini.
BAB 2 TINJAUAN PUSTAKA
2.1 Mikrokontroller ATmega8535
Mikrokontroler merupakan keseluruhan sistem komputer yang dikemas menjadi sebuah chip di mana di dalamnya sudah terdapat Mikroprosesor, I/O, Memori bahkan ADC, berbeda dengan Mikroprosesor yang berfungsi sebagai pemroses data.Mikrokontroller AVR (Alf and Vegard’s Risc processor) memiliki arsitektur 8 bit, dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam 1 siklus clock atau dikenal dengan teknologi RISC (Reduced Instruction Set Computing). Secara umum, AVR dapat dikelompokan ke dalam 4 kelas, yaitu keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing-masing adalah kapasitas memori, peripheral dan fungsinya (Heryanto, dkk, 2008). Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Berikut ini gambar 2.1 Mikrokontroler Atmega8535.
Gambar 1. Mikrokontroler ATMega8535
2.1.1 Fitur Mikrokontroler ATMega8535
Fitur ATMega8535 yang merupakan produksi ATMEL yang berjenis AVR adalah sebagai berikut:
1. 32 saluran I/O yang terdiri dari 4 port (Port A, Port B, Port C, dan Port D) yang masing-masing terdiri dari 8 bit.
2. ADC 10 bit (8 Pin di PortA.0 s/d PortA.7).
3. 2 buah Timer / Counter (8 bit) 4. 1 buah Timer / Counter (16 bit) 5. 4 Channel PWM
6. 6 sleep modes; Idle, ADC Noise Reduction, Power-save, Power-down, Standby and Extended Standby
7. Komparator analog
8. Watchdog timer dengan osilator internal 1 MHz 9. Memori 8 Kb Flash
10. Memori 512 byte SRAM 11. Memori 512 byte EEPROM 12. Kecepatan maksimal 16 MHz
13. Tegangan operasi 4,5 VDC s/d 5,5 VDC 14. 32 jalur I/O yang dapat deprogram 15. Interupsi Internal dan Eksternal
16. Komunikasi serial menggunakan Port USART dengan kecepatan maksimal 2,5Mbps
17. Pemograman langsung dari port pararel computer.
2.2 Motor DC
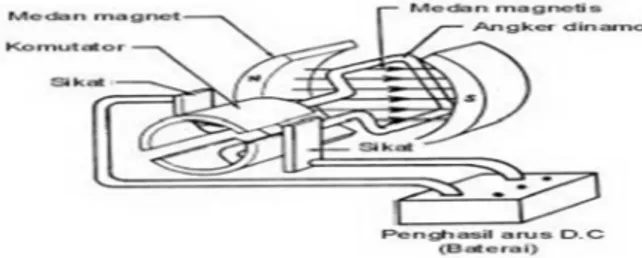
Motor Dc adalah motor listrik yang memerlukan supply tegangan arus searah pada kumparan medan untuk diubah menjadi energi gerak mekanik.
Kumparan medan pada motor DC disebut stator ( bagian yang tidak berputar)dan kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah, sebagaimana namanya, menggunakan arus langsung yang tidak langsung / direct-undirectional. Dibawah ini dapat dilihat bentuk sederhana dari motor dc seperti gambar 2.2 berikut:
Gambar 2. Motor Sederhana
2.2.1 Jenis jenis motor DC
Jenis jenis motor DC adalah sebagai berikut:
1. Motor DC sumber daya terpisah/ Separately Excited, Jika arus medan dipasok dari sumber terpisah maka disebut motor DC sumber daya terpisah/separately excited.
2. Motor DC sumber daya sendiri/ Self Excited, Pada jenis motor DC sumber daya sendiri di bagi menjadi 3 tipe sebagi berikut :
3. Motor DC Tipe Shunt Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan dinamo (A). Oleh karena itu total arus dalam jalur merupakan penjumlahan arus medan dan arus dinamo.
2.2.2 Motor DC Tipe Seri
Dalam motor seri, gulungan medan (medan shunt) dihubungkan secara seri dengan gulungan dinamo (A). Oleh karena itu, arus medan sama dengan arus dinamo. Karakter kecepatan dari motor DC tipe seri adalah :
1. Kecepatan dibatasi pada 5000 RPM
2. Harus dihindarkan menjalankan motor seri tanpa ada beban sebab motor akan mempercepat tanpa terkendali.
2.2.3 Motor DC Tipe Kompon/Gabungan
Motor Kompon DC merupakan gabungan motor seri dan shunt. Pada motor kompon, gulungan medan (medan shunt) dihubungkan secara paralel dan seri dengan gulungan dinamo (A). Sehingga, motor kompon memiliki torque penyalaan awal yang bagus dan kecepatan yang stabil. Karakter dari motor DC tipe kompon/gabungan ini adalah, makin tinggi persentase penggabungan (yakni persentase gulungan medan yang dihubungkan secara seri), makin tinggi pula torque penyalaan awal yang dapat ditangani oleh motor ini.
2.2.4 Prinsip Dasar Cara Kerja
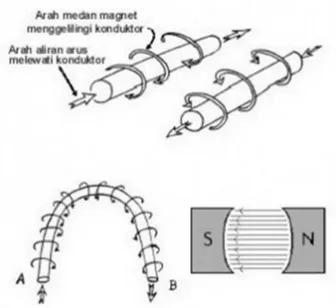
Jika arus lewat pada suatu konduktor, timbul medan magnet di sekitar konduktor. Arah medan magnet ditentukan oleh arah aliran arus pada konduktor.
Medan magnet yang membawa arus mengelilingi konduktor dapat dilihat pada gambar 2.4 berikut:
Gambar 3. Medan Magnet Yang Membawa Arus Mengelilingi Konduktor
Aturan Genggaman Tangan Kanan bisa dipakai untuk menentukan arah garis fluks di sekitar konduktor. Genggam konduktor dengan tangan kanan dengan jempol mengarah pada arah aliran arus, maka jari-jari anda akan menunjukkan arah garis fluks. Gambar diatas menunjukkan medan magnet yang terbentuk di sekitar konduktor berubah arah karena bentuk U. Medan magnet hanya terjadi di sekitar sebuah konduktor jika ada arus mengalir pada konduktor tersebut. Jika konduktor berbentuk U (angker dinamo) diletakkan di antara kutub utara dan selatan yang kuat medan magnet konduktor akan berinteraksi dengan medan magnet kutub.
2.3 LCD (Liquid Crystal Display)
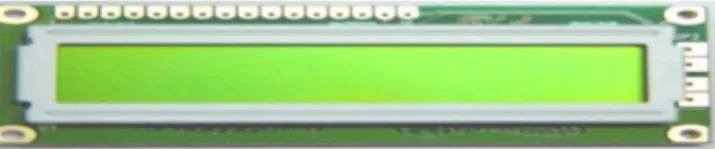
LCD merupakan salah satu perangkat penampil yang sekarang ini mulai banyak digunakan. Penampil LCD mulai dirasakan menggantikan fungsi dari penampil CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text baik monokrom (hitam dan putih), maupun yang berwarna. Teknologi LCD memberikan keuntungan dibandingkan dengan teknologi CRT, kaena pada dasarnya, CRT adalah tabung triode yang digunakan sebelum transistor ditemukan. Beberapa keuntungan LCD dibandingkan dengan CRT adalah konsumsi daya yang relative kecil, lebih ringan, tampilan yang lebih bagus,
dan ketika berlama-lama di depan monitor, monitor CRT lebih cepat memberikan kejenuhan pada mata dibandingkan dengan LCD.
Gambar 4. LCD 16x2
LCD memanfaatkan silicon atau gallium dalam bentuk Kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom. Dengan demikian, setiap pertemuan baris dan kolom adalah sebuah LED terdapat sebuah bidang latar (backplane), yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda trasparan. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pad sisi dalam lempeng kaca bagian depan.Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa microampere), sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari. Di bawah sinar cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan.
2.4 Adjustable Infrared Sensor
Adjustable infra red sensor merupakan seperangkat pemancar dan penerima di salah satu sensor saklar photo electric. Jarak deteksi sensor ini dapatdi sesuaikan sesuai dengan permintaan. Sensor ini memiliki jangkauan deteksi 3-80cm. Bentuk sensor ini kecil, mudah digunakan, murah, dan mudah untuk dirakitdengan robot untuk menghindari rintangan, media interaktif, perakitan pada mesin industri, dan banyak lagi yang lainnya. Sensor ini bekerja secara otomatis, serta sensor IR atau infrared ini banyak di gunakan sebagai aplikasi switch otomatis untuk aneka aplikasi.Spesifikasi Adjustable Infrared Sensor :
a. Power supply: 5V
c. Range:3-80cm adjustable d. Red - V+
e. Yellow - Signal f. Green – GND
Gambar 5. Adjustable infrared sensor
2.5 MOTOR SERVO
Motor DC Servo (DC-SV) pada dasarnya adalah motor DC-MP dengan kualifikasi khusus yang sesuai dengan aplikasi “servoing” di dalam teknik kontrol.
Dalam kamus Oxford istilah “servo” diartikan sebagai “a mechanism that controls a larger mechanism”. Motor servo merupakan motor DC yang mempunyai kualitas tinggi, sudah dilengkapi dengan sistim kontrol di dalamnya. Dalam aplikasi motor servo sering digunakan sebagai kontrol loop tertutup untuk menangani perubahan posisi secara tepat dan akurat. Begitu juga dengan pengaturan kecepatan dan percepatan.
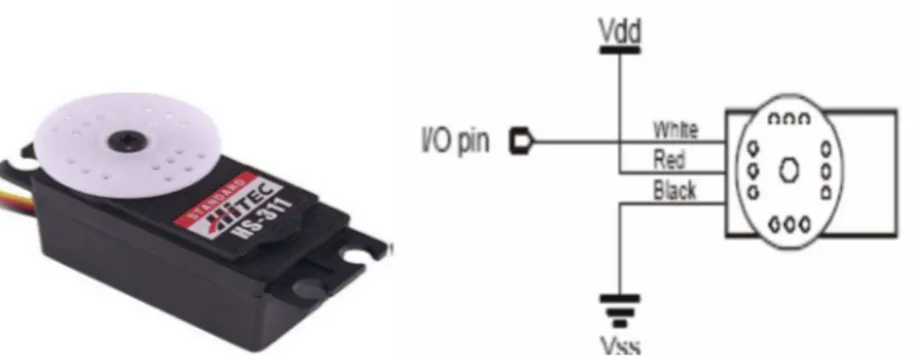
(a) Bentuk fisik (b) Pin-Pin dan Pengkabelan Gambar 6. Model Fisik dan Pin-Pin Motor servo
Bentuk fisik dari motor servo dapat dilihat pada gambar 2.8 diatas. Sistim pengkabelan motor servo terdiri dari 3 bagian, yaitu Vcc, Gnd, dan kontrol (PWM).
Penggunaan PWM pada motor servo berbeda dengan penggunaan PWM pada motor DC. Pada motor servo, pemberian nilai PWM akan membuat motor servo bergerak
pada posisi tertentu dan kemudian berhenti (kontrol posisi). Pengaturannya dapat dilakukan dengan menggunakan delay pada setiap perpindahan dari posisi awal menuju posisi akhir. Prinsip utama pengontrolan motor servo adalah pemberian nilai PWM pada kontrolnya. Perubahan duty cycle akan menentukan perubahan posisi dari motor servo. Mode pensinyalan motor servo tampak pada gambar 2.10.
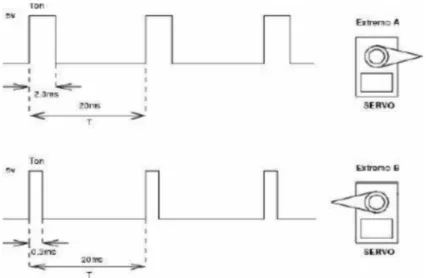
Gambar 7. Mode Pensinyalan motor servo
Contoh dimana bila diberikan pulsa dengan besar 1.5ms mencapai gerakan 90 derajat, maka bila kita berikan data kurang dari 1.5 ms maka posisi mendekati 0 derajat dan bila kita berikan data lebih dari 1.5 ms maka posisi mendekati 180 derajat. Contoh Posisi dan Waktu Pemberian Pulsa tampak pada gambar 4
Gambar 8. Contoh Posisi dan Waktu Pemberian Pulsa
Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50Hz. Dimana pada saat sinyal dengan frekuensi 50Hz tersebut dicapai pada kondisi Ton duty cycle 1.5ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0° / netral). Pada saat Ton duty
cycle dari sinyal yang diberikan kurang dari 1.5ms, maka rotor akan berputar ke arah kiri dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5ms, maka rotor akan berputar ke arah kanan dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
2.6 BASCOM-AVR
Bahasa pemrograman basic banyak digunakan untuk aplikasi mikrokontroler karena kompatibel oleh mikrokontroler jenis AVR dan didukung dengan compiler pemrograman berupa software BASCOM AVR. Bahasa basic memiliki penulisan program yang mudah dimengerti walaupun untuk orang awam sekalipun, karena itu bahasa ini dinamakan bahasa basic. BASCOM AVR sendiri adalah salah satu tool untuk pengembangan/ pembuatan program untuk kemudian ditanamkan dan dijalankan pada mikrokontroler terutama mikrokontroler keluarga AVR .
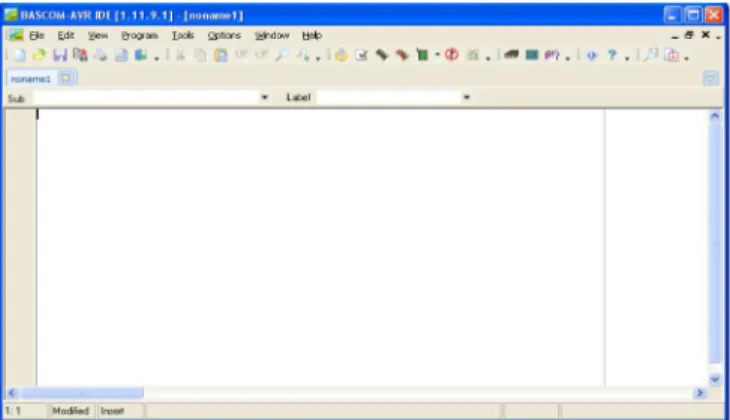
BASCOM AVR juga bisa disebut sebagai IDE (Integrated Development Environment) yaitu lingkungan kerja yang terintegrasi, karena disamping tugas utamanya meng-compile kode program menjadi file hex/ bahasa mesin, BASCOM AVR juga memiliki kemampuan/ fitur lain yang berguna sekali seperti monitoring komunikasi serial dan untuk menanamkan program yang sudah di compile ke mikrokontroler. BASCOM-AVR adalah program basic compiler berbasis windows untukmikrokontroler keluarga AVR merupakan pemrograman dengan bahasa tingkattinggi ” BASIC ” yang dikembangkan dan dikeluarkan oleh MCS elektronikasehingga dapat dengan mudah dimengerti atau diterjemahkan.Dalam program BASCOM-AVR terdapat beberapa kemudahan, untukmembuat program software ATMEGA 8535, seperti program simulasi yangsangat berguna untuk melihat, simulasi hasil program yang telah kita buat,sebelum program tersebut kita download ke IC atau ke mikrokontroler.Ketika program BASCOM-AVR dijalankan dengan mengklik iconBASCOM-AVR, maka jendela berikut akan tampil :
Gambar 9. Tampilan Jendela Program BASCOM-AVR
BASCOM-AVR menyediakan pilihan yang dapat mensimulasikan program.
Program simulasi ini bertujuan untuk menguji suatu aplikasi yang dibuat dengan pergerakan LED yang ada pada layar simulasi dan dapat juga langsung dilihat pada LCD, jika kita membuat aplikasi yang berhubungan dengan LCD.Intruksi yang dapat digunakan pada editor Bascom-AVR relatif cukup banyak dan tergantung dari tipe dan jenis AVR yang digunakan. Berikut ini beberapa instruksi-instruksi dasar yang dapat digunakan pada mikrokontroler ATMEGA 8535.
2.6.1 Kontruksi Bahasa Basic Pada Bascom Avr
Setiap bahasa pemprograman mempunyai standar penulisan program. Konstruksi dari program bahasa BASIC harus mengikuti aturan sebagai berikut:
$regfile = “header”
’inisialisasi
’deklarasi variabel
’deklarasi konstanta Do
’pernyataan-pernyataan Loop
End
2.6.2 Pengarah Preprosesor
$regfile = “m16def.dat” merupakan pengarah preprosesor bahasa BASIC yang memerintahkan untuk meyisipkan file lain, dalam hal ini adalah file m8535def.dat yang berisi deklarasi register dari mikrokonroller ATmega8535, pengarah
$crystal = 12000000 ‘menggunakan crystal clock 12 MHz. Deklarasi sangat diperlukan bila akan menggunakan pengenal (identifier) dalam suatu program.
• Deklarasi Variabel
Bentuk umum pendeklarasian suatu variable adalah Dim nama_variabel AS tipe_data Contoh : Dim x As Integer ‘deklarasi x bertipe integer
• Deklarasi Konstanta
Dalam Bahasa Basic konstanta di deklarasikan langsung.
Contohnya : S = “Hello world” ‘Assign string
• Deklarasi Fungsi
Fungsi merupakan bagian yang terpisah dari program dan dapat dipanggil di manapun di dalam program. Fungsi dalam Bahasa Basic ada yang sudah disediakan sebagai fungsi pustaka seperti print, input data dan untuk menggunakannya tidak perlu dideklarasikan.
• Deklarasi buatan
Fungsi yang perlu dideklarasikan terlebih dahulu adalah fungsi yang dibuat oleh programmer. Bentuk umum deklarasi sebuah fungsi adalah :
Sub Test ( byval variabel As type)
Contohnya : Sub Pwm(byval Kiri As Integer , Byval Kanan As Integer)
2.6.3 Aritmatika dan Rasional
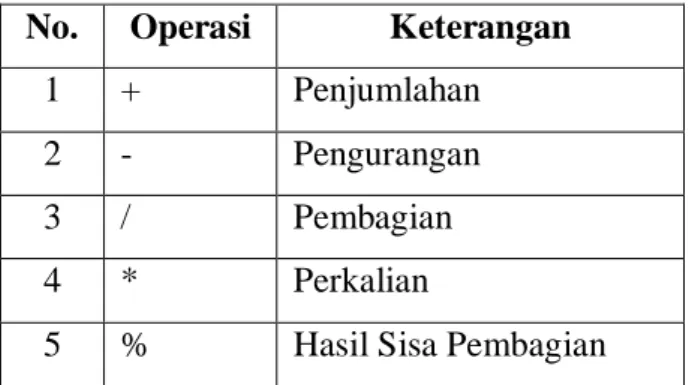
Operator Penugasan (Assignment operator) dalam Bahasa Basic berupa “=”.
Tabel 1. Data Aritmatika No. Operasi Keterangan
1 + Penjumlahan
2 - Pengurangan
3 / Pembagian
4 * Perkalian
5 % Hasil Sisa Pembagian
Operator hubungan digunakan untuk membandingkan hubungan dua buah operand atau sebuah nilai / variable.
Tabel 2. Data Rasional (Perbandingan) No. Operasi Contoh Keterangan
1 = X = Y Sama dengan
2 < > X< >Y Tidak sama dengan 3 > X > Y Lebih besar dari 4 < X < Y Lebih kecil dari
5 > = X > = Y Lebih besar atau sama dengan 6 < = X < = Y Lebih kecil atau sama dengan 2.6.4 Operator Logika
Operator logika digunakan untuk membandingkan logika hasil dari operator-operator hubungan. Operator logika ada empat macam, yaitu :
Tabel 3. Operator Logika
No. Operasi Contoh Keterangan
1 AND &B10 AND &B01 = &B10 Operasi AND 2 OR &B1000 OR &B0111 = &1111 Operasi OR 3 NOT NOT &B11 = &B00 Operasi NOT
2.7 Relay
Relay adalah komponen elektronika berupa saklar elektronik yang digerakkanoleh arus listrik. Secara prinsip, relai merupakan tuas saklar dengan lilitan kawat padabatang besi (solenoid) di dekatnya. Ketika solenoid dialiri arus listrik, tuas akan tertarikkarena adanya gaya magnet yang terjadi pada solenoid sehingga kontak saklar akanmenutup. Pada saat arus dihentikan, gaya magnet akan hilang, tuas akan kembali ke posisisemula dan kontak saklar kembali terbuka.Relay biasanya digunakan untukmenggerakkanarus/tegangan yang besar (misalnya peralatan listrik 4 ampere AC 220 V) denganmemakai arus/tegangan yang kecil (misalnya 0.1 ampere 12 Volt DC).
Gambar 10. Relay
BAB 3 PERANCANGAN DAN PEMBUATAN
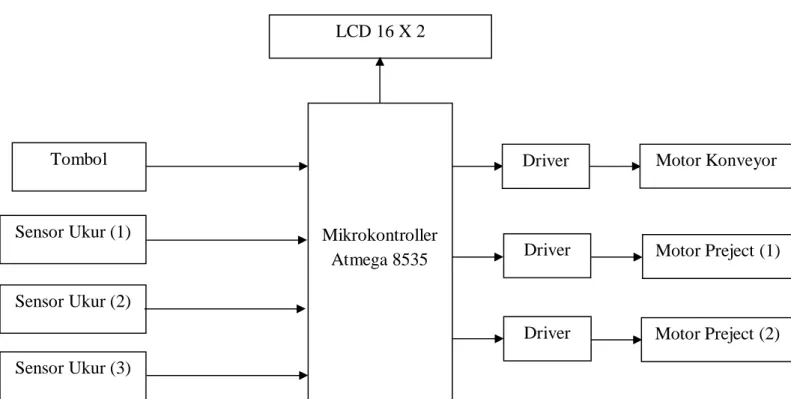
3.1 Diagram Blok Rangkaian
Gambar 11. Diagram blok Rangkaian
Pada perancangan alat ini mikrokontroller Atmega8535 akan mendeteksi sensor ukur sehingga kita dapat mengetahui apakah ada jeruk yang melawati sensor.
Selain itu mikrokontroller Atmega8535 akan mengambil data ukuran jeruk yang telah dibaca oleh sensor ukur. Ketika ukuran jeruk telah diketahui maka secara otomatis motor preject akan diaktifkan melalui rangkaian driver. Motor preject akan diaktifkan pada saat ukuran jeruk tergolong ukuran besar dan sedang. Sedangkan untuk ukuran jeruk yang kecil, secara otomatis akan dibiarkan sehingga sampai kepenampungan ujung konveyor. Pada saat sebuah jeruk terdeteksi ukurannya, maka perhitungan jumlah jeruk akan ditampilkan di layar LCD. Data yang ditampilkan adalah jumlah jeruk yang sesuai dengan ukuran masing-masing. Untuk menghentikan sistem dilakukan dengan cara menekan tombol stop.
LCD 16 X 2
Mikrokontroller Atmega 8535 Tombol
Sensor Ukur (1)
Driver
Driver
Driver
Motor Konveyor
Motor Preject (1)
Motor Preject (2) Sensor Ukur (2)
Sensor Ukur (3)
3.2 Rancang Gambar Rangkaian 3.2.1 Rangkaian LCD 16 X 2
Gambar 12. Rangkaian LCD 16X2
Dari gambar rangkaian LCD dapat kita lihat bahwa LCD merupakan sebuah layar yang akan menampilkan banyak nya jumlah jeruk berdasarkan ukuran. Dimanakaki 1, kaki 5 dan kaki 16 padarangkaian LCD dihubungkanke ground LCD. Kemudian dapat kita lihat kaki 5 dan kaki 15 pada LCD dihubungkan ke Vcc LCD.kaki 3 LCD dihubungkan ke sebuah resistor (pengatur kontras cahaya LCD) menujuke ground.
Kaki 4 dihubungkan ke Port.C2 mikrokontroler. Kaki 6 LCD dihubungkan ke Port.C3 mikrokontroler. Kaki 11 LCD dihubungkan ke Port.C4 mikrokontroler. Kaki 12 LCD dihubungkan ke Port.C5 mikrokontroler. Kaki 13 LCD dihubungkan Port.C.6 mikrontroler, dan kaki 14 LCD dihubungkan PortC.7 mikrokontroler.
5V
R23K3
D714D613D512D411D310D29D18D07
E6RW5RS4
VSS1 VDD2 VO3 A15 K16
LCD 16X2
PC6/TOSC1 PC5 PC4 PC3 PC2 PC1/SDA PC0/SCL
PC7/TOSC2 PA6/ADC6 PA5/ADC5 PA4/ADC4 PA3/ADC3 PA2/ADC2 PA1/ADC1 PA0/ADC0
PA7/ADC7 PB6/MISO PB5/MOSI PB4/SS PB3/AIN1/OC0 PB2/AIN0/INT2 PB1/T1 PB0/T0/XCK
PB7/SCK
PD6/ICP1 PD5/OC1A PD4/OC1B PD3/INT1 PD2/INT0 PD1/TXD PD0/RXD
PD7/OC2
RESET XTAL1 XTAL2
AVCC AREF
U1
ATMEGA8535
CRYSTAL
12MHz
C1
33pF
C233pF
R1
10K C3
10uF 5V
3.2.2 Rangkaian Sensor Adjustable Infrared
Gambar 13. Rangkaian Sensor Adjustable Infrared
Dalam rangkaian sistem ini terdapat 3 sensor adjustable infrared, yang pertama yaitu sensor yang mendeteksi ukuran jeruk besar, kemudian sensor yang mendeteksi ukuran jeruk sedang, dan yang ketiga sensor yang mendeteksi ukuran jeruk kecil.
Pada rangkaian sensor adjustable infrared terdapat tiga buah kaki, yaitu kaki pertama Vcc yang dihubungkan dengan tegangan 5V, kaki kedua adalah output yang dihubungkan pada kaki mikrokontroller. Kaki output sensor yang pertama dihubungkan ke kaki Port A.0 pada mikrokontroller Atmega 8535, kaki output sensor yang kedua akan dihubungkan ke kaki Port A.1pada mikrokontroller Atmega 8535, dan kaki output yang ke tiga dihubungkan ke kaki Port A.2pada mikrokontroller Atmega 8535. Nilai output nya berlogic 1 apabila belum ada terdeteksi jeruk, jika sensor pertama mendeteksi ada jeruk maka output sensor mengirim nilai berlogic 0 ke kaki Port A0/ADC 0 pada rangkaian mikrokontroler. Mikrokontroller akan menggerakkan motor servo untuk mereject jeruk.
PC6/TOSC1 PC5 PC4 PC3 PC2 PC1/SDA PC0/SCL
PC7/TOSC2 PA6/ADC6 PA5/ADC5 PA4/ADC4 PA3/ADC3 PA2/ADC2 PA1/ADC1 PA0/ADC0
PA7/ADC7 PB6/MISO
PB5/MOSI PB4/SS PB3/AIN1/OC0 PB2/AIN0/INT2 PB1/T1 PB0/T0/XCK
PB7/SCK
PD6/ICP1 PD5/OC1A PD4/OC1B PD3/INT1 PD2/INT0 PD1/TXD PD0/RXD
PD7/OC2
RESET XTAL1 XTAL2
AVCC AREF
U1
ATMEGA8535
CRYSTAL
12MHz 33pFC1
C233pF
R1
10K C3
10uF 5V
ADJUSTABLE INFRARED
VCC GND OUT
ADJUSTABLE INFRARED
VCC GND OUT
ADJUSTABLE INFRARED
VCC GND OUT
5V
3.2.3 Rangkaian Mikrokontroller Atmega 8535
Gambar 14. Rangkaian Mikrokontroller Atmega 8535
Dari gambar rangkaian diatas dapat diketahui bahwa mikrokontroller merupakan pusat kendali dari sistem kerja alat pendeteksi kebisingan suara. Pada IC mikrokontroller ATMega8535 diberi program yang memuat dari seluruh kerja rangkaian, sehingga rangkaian dapat bekerja sesuai dengan yang di program.
Mikrokontroller ATMega8535 memiliki 40 pin dengan 32 pin diantara nya digunakan sebagai port paralel. Satu port paralel terdiri dari 8 pin, sehingga jumlah port pada mikrokontroller ada 4 port, yaitu port A, port B, port C, dan port D. Pada XTAL1 dan XLTAL2 mikrokontroller terhubung dengan osilator eksternal (12MHz).
Reset terhubung dengan tombol push button, yang berfungsi mengembalikan ke kondisi awal apabila terjadi error saat program berjalan.
PC6/TOSC1 PC5 PC4 PC3 PC2 PC1/SDA PC0/SCL
PC7/TOSC2 PA6/ADC6 PA5/ADC5 PA4/ADC4 PA3/ADC3 PA2/ADC2 PA1/ADC1 PA0/ADC0
PA7/ADC7 PB6/MISO
PB5/MOSI PB4/SS PB3/AIN1/OC0 PB2/AIN0/INT2 PB1/T1 PB0/T0/XCK
PB7/SCK
PD6/ICP1 PD5/OC1A PD4/OC1B PD3/INT1 PD2/INT0 PD1/TXD PD0/RXD
PD7/OC2
RESET XTAL1 XTAL2
AVCC AREF
U1
ATMEGA8535
CRYSTAL
12MHz 33pFC1
C2 33pF
R1
10K C3
10uF VCC
3.2.4 Rangkaian Tombol
Gambar 15. Rangkaian Tombol
Dalam rangkaian sistem ini terdapat tombol start dan tombol stop, yang berfungsi untuk mengaktifkan dan menonaktifkan sistem.Pada rangkaian tombol start dan stop kaki 1 dihubungkan ke ground dan pada rangkaian tombol start kaki 2 dihubungkan ke kaki Port B.0 pada rangkaian mikrokontroller Atmega 8535, sedangkan kaki 2 pada tombol stop dihubungkan ke kaki Port B.1 pada rangkaian mikrokontroller Atmega 8535. Pada port B.0 telah diberikan logic 1, ketika tombol push button ditekan, maka secara otomatis keadaan menjadi logic 0, maka sistem akan aktif.
PC6/TOSC1 PC5 PC4 PC3 PC2 PC1/SDA PC0/SCL
PC7/TOSC2 PA6/ADC6 PA5/ADC5 PA4/ADC4 PA3/ADC3 PA2/ADC2 PA1/ADC1 PA0/ADC0
PA7/ADC7 PB6/MISO
PB5/MOSI PB4/SS PB3/AIN1/OC0 PB2/AIN0/INT2 PB1/T1 PB0/T0/XCK
PB7/SCK
PD6/ICP1 PD5/OC1A PD4/OC1B PD3/INT1 PD2/INT0 PD1/TXD PD0/RXD
PD7/OC2
RESET XTAL1 XTAL2
AVCC AREF
U1
ATMEGA8535
CRYSTAL
12MHz 33pFC1
C233pF
R1
10K C3
10uF 5V
START
STOP
3.2.5 Rangkaian Motor Servo
Gambar 16. Rangkaian Motor Servo
Dalam rangkaian sistem ini terdapat 2 buah motor servo yang berfungsi menggerakkan preject.Motor servo terdiri dari 3 pin yaitu Vcc, GND, dan pin Signal.
Agar motor servo dapat berputar, pin signal diberikan pulsa. Lebar pulsa akan menentukan sudut putaran. Pin signal dihubungkan ke port D.4 dan port D.5 pada mikrokontroller.
PC6/TOSC1 PC5 PC4 PC3 PC2 PC1/SDA PC0/SCL
PC7/TOSC2 PA6/ADC6 PA5/ADC5 PA4/ADC4 PA3/ADC3 PA2/ADC2 PA1/ADC1 PA0/ADC0
PA7/ADC7 PB6/MISO
PB5/MOSI PB4/SS PB3/AIN1/OC0 PB2/AIN0/INT2 PB1/T1 PB0/T0/XCK
PB7/SCK
PD6/ICP1 PD5/OC1A PD4/OC1B PD3/INT1 PD2/INT0 PD1/TXD PD0/RXD
PD7/OC2
RESET XTAL1 XTAL2
AVCC AREF
U1
ATMEGA8535
CRYSTAL
12MHz 33pFC1
C233pF
R1
10K C3
10uF 5V
+88.8 +88.8
5V
3.2.6 Rangkaian Motor DC
Gambar 17. Rangkian Motor DC
Dalam rangkaian sistem ini terdapat driver motor L298, L298 ada 4 output dan 4 input. L298 berfungsi sebagai penguat yang dikendalikan oleh mikrokontroller, L298 digunakan karena output mikrokontroller tidak bisa atau tidak kuat untuk langsung mengendalikan motor dc. Motor dc berfungsi untuk menggerakan konveyor. Dalam rangkaian motor dc terdapat 2 kabel yang bernilai positif dan bernilai negatif. Kaki IN1 L298 terhubung ke kaki port D.6 pada mikrokontroller Atmega 8535, dan kaki IN2 L298 terhubung ke kaki Port D.7 pada mikrokontroller Atmega 8535.
3.2.7 Rangkaian Regulator 7805
Gambar 18. Rangkaian Regulator 7805
PC6/TOSC1 PC5 PC4 PC3 PC2 PC1/SDA PC0/SCL
PC7/TOSC2 PA6/ADC6 PA5/ADC5 PA4/ADC4 PA3/ADC3 PA2/ADC2 PA1/ADC1 PA0/ADC0
PA7/ADC7 PB6/MISO PB5/MOSI PB4/SS PB3/AIN1/OC0 PB2/AIN0/INT2 PB1/T1 PB0/T0/XCK
PB7/SCK
PD6/ICP1 PD5/OC1A PD4/OC1B PD3/INT1 PD2/INT0 PD1/TXD PD0/RXD
PD7/OC2
RESET XTAL1 XTAL2
AVCC AREF
U1
ATMEGA8535
CRYSTAL
12MHz 33pFC1
C233pF
R1
10K C3
10uF 5V
L298 OUT2 OUT1
GND VMotor OUT4
OUT3
IN4 IN3 IN2 IN1
VCC 5V
1 VI
VO 3
GND2
U2
7805
12V 5V
Rangkaian regulator 7805 pada alat ini berfungsi sebagai supply tegangan ke mikrokontroller ATMega8535. Pin 1 IC 7805 dihubungkan ke tegangan 12V dc , pin 2 dihubungkan ke ground dan pin 3 menghasilkan output 5 V yang di stabilkan.
3.2.8 Rangkaian Steodown LM2596
Gambar 19. Rangkaian Stepdown LM2596
Rangkaian Stepdown LM2596 pada alat ini berfungsi sebagai supply tegangan ke mikrokontroller, Motor Servo, LCD, Sensor Adjustable Infrared, Driver motor. Pin input positif dihubungkan ke tegangan 12V, dan input negatif dihubungkan ke ground, kaki output positif mengeluarkan tegangan 5V, dan kaki output negatif dihubungkan ke ground.
STEPDOWN LM2596
+IN +OUT
-IN -OUT
12V 5V
3.3 Flowchart Sistem
Gambar 20. Flowchart Sistem
BAB 4 HASIL DAN PEMBAHASAN
4.1 Pengujian Tegangan Output Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan keluaran oleh catu daya pada rangkaian yang terhubung ke PLN. Dengan mengukur tegangan keluaran dari power supply menggunakan multimeter. Tegangan multimeter di atur pada range 20 V dc, pengukuran dapat dilakukan dengan cara positif dari multimeter diletakkan pada bagian dalam power supply dan negatif multimeter diletakkan pada bagian luar power supply. Setelah melakukan pengujian power supply maka diperoleh besarnya tegangan keluaran sebesar 12,30 V.
Gambar 21. Pengujian Tegangan Output Power Supply
4.2 Pengujian Tegangan Output Modul Regulator LM2596
Pengujian tegangan output modul regulator ini bertujuan untuk mengetahui tegangan keluaran dari tegangan modul LM2596 sehingga kita dapat mengetahui LM2596 berfungsi dengan baik atau tidak. Tegangan multimeter di atur pada range 20 V dc, positif multimeter dihubungkan pada output positif modul LM2596. Negatif multimeter dihubungkan ke output negatif modul LM2596. Hasil pengukuran dari tegangan output yangsebesar 11,47 V dan 11,48 V.
Gambar (a).Regulator LM 2596 (1) Gambar (b). Regulator LM 2596 (2)
Gambar 22.PengujianTegangan Output Modul Regulator LM 2596
4.3 Pengujian Tegangan Output IC Regulator 7805
Pengujian rangkaian regulator ini bertujuan untuk mengetahui tegangan keluaran oleh rangkaian regulator 7805. Mengukur tegangan keluaran dari output regulator 7805 dengan menggunakan multimeter. Tegangan multimeter diatur pada range 20V dc, positif multimeter diletakkan pada output regulator 7805, dan negatif multimeter diletakkan pada bagian negatif dari regulator 7805. Setelah dilakukan pengujian maka di peroleh besarnya tegangan keluaran sebesar 5,02 V.
Gambar 23. PengujianTegangan Output IC Regulator 7805
4.4 Pengujian Tegangan Output Tombol Start dan Stop pada saat Ditekan dan Tidak
Pengujian tegangan output tombol dilakukan untuk mengetahui tegangan output tombol pada saat ditekan dan tidak ditekan. Tombol start pada saat tombol ditekan, positif multimeter dihubungkan ke portB.1 pada mikrokontroller, negatif multimeter dihubungkan kenegatif pada rangkaian. Setelah dilakukan pengujian di dapatkan tegangan tombol sebesar 0,00 V. Pada saat tombol start tidak ditekan, positif multimeter dihubungkan ke portB.1 pada mikrokontroller, negatif multimeter dihubungkan ke negatif pada rangkaian. Setelah dilakukan pengujian didapatkan tegangan tombol sebesar 4,79 V. Sedangkan tombol stop pada saat tombol ditekan, positif multimeter dihubungkan ke portB.0 pada mikrokontroller, negatif multimeter dihubungkan ke negatif pada rangkaian. Setelah dilakukan pengujian didapatkan tegangan tombol sebesar 0,00 V. Pada saat tombol stop tidak ditekan, positif multimeter dihubungkan ke portB.0 pada mikrokontroller, negatif multimeter dihubungkan ke negatif pada rangkaian. Setelah dilakukan pengujian didapatkan tegangan tombol sebesar 4,78 V.
(a) Tombol Stop tidak ditekan (b). Tombol Stop ditekan
Gambar 24. Pengujian Tegangan Output Tombol Stop pada saat Ditekan danTidak Ditekan
(a) TombolStart tidak ditekan (b). Tombol Start ditekan
Gambar 25. Pengujian Tegangan Output Tombol Start pada saat Ditekan danTidak Ditekan
4.5 PengujianTegangan Output Mikrokontroller ke Modul L298
Pengujian tegangan output mikrokontroller ke modul L298 dilakukan untuk mengetahui tegangan keluaran mikrokontroller ke modul L298 pada saat motor konveyor dalam keadaan on dan off. Positif multimeter diletakkan pada port D.6 dan diletakkan pada port D.7. Sedangkan negatif multimeter diletakkan pada rangkaian.
Setelah dilakukan pengujian Tegangan Output Mikrokontroller ke Modul L298 yang dihubungkan ke Port D.6 dalam keadaan on yaitu 0,00 V, sedangkan nilai dalam keadaan off yaitu 0,01 V. Tegangan Output MikrokontrollerkeModulL298 yang dihubungkan ke Port D.7 dalam keadaan on yaitu 5,01 V, sedangkan nilai dalam keadaan off yaitu 0,02 V.
Gambar (a). PD.6 dalam keadaan On Gambar (b). PD.6 dalam keadaan Of Gambar 26. PengujianTegangan Output MikrokontrollerkeModul L298 ke
PD.6
Gambar (a). PD.7 dalam keadaanOn Gambar (b). PD.7 dalam keadaan Off
Gambar 27. PengujianTegangan Output MikrokontrollerkeModul L298 ke PD.7
4.6 Pengujian Tegangan Output L298 ke Motor DC
Pengujian tegangan output L298 ke motor dc dilakukan untuk mengetahui tegangan output dari modul L298 ke motor konveyor. Positif multimeter dan negatif masing-masing diletakkan pada bagian output L298. Setelah dilakukan pengujian tegangan output L298 ke motor dc dalam keadaan on sebesar 8,92 V dan dalam keadaan off sebesar 0,00 V.
Gambar (a). Dalam keadaan On Gambar (b). Dalam keadaan Off
Gambar 28. Pengujian Tegangan Output L298 ke Motor DC
4.7 Pengujian Tegangan Output Sensor Pada Saat Mendeteksi Jeruk Dan Tidak Mendeteksi Jeruk
Pengujian Tegangan Output Sensor Pada Saat Mendeteksi Jeruk Dan Tidak Mendeteksi Jeruk dilakukan untuk mengetahui tegangan dari sensor pada saat mendeteksi jeruk dan tidak mendeteksi jeruk. Dalam pengujian jeruk ukuran besar, pada saat terdeteksi ada jeruk tegangannya sebesar 0,65 V dan pada saat tidak ada terdeteksi jeruk tegangannya sebesar 3,39 V. Dalam pengujian jeruk ukuran sedang, pada saat terdeteksi ada jeruk tegangan nya sebesar 0,67 V dan pada saat tidak ada terdeteksi jeruk tegangannya sebesar 4,64 V. Dalam pengujian jeruk ukuran kecil, pada saat terdeteksi ada jeruk tegangan nya sebesar 0,05 V dan pada saat tidak ada terdeteksi jeruk tegangannya sebesar 3,15 V.
Gambar (a). Ada jeruk Gambar (b). Tidak ada jeruk
Gambar 29. Pengujian Tegangan Output Sensor Pada Saat Mendeteksi Jeruk Dan Tidak Mendeteksi Jeruk Ukuran Besar
Gambar (a). Ada jeruk Gambar (b). Tidak ada jeruk
Gambar 30. Pengujian Tegangan Output Sensor Pada Saat Mendeteksi Jeruk Dan Tidak Mendeteksi Jeruk Ukuran Sedang
Gambar (a). Ada jeruk Gambar (b). Tidak ada jeruk Gambar 31. Pengujian Tegangan Output Sensor Pada Saat Mendeteksi Jeruk
Dan Tidak Mendeteksi Jeruk Ukuran Kecil Dari hasil pengujian diatas maka dihasilkan tabel sebagai berikut :
Buah Tinggi Jeruk Ukuran Jeruk Keterangan J
E
R
U
K
B E S A R
6,2 cm Berhasil
5,9 cm Berhasil
5,7 cm Berhasil
5,5 cm Berhasil
5,3 cm Berhasil
S E D A N G
5,2 cm Berhasil
5,0 cm Berhasil
4,9 cm Berhasil
4,7 cm Berhasil
4,5 cm Berhasil
K E C I L
4,4 cm Berhasil
4,2 cm Berhasil
4,0 cm Berhasil
3,9 cm Berhasil
3,7 cm Berhasil
Tabel 4. Hasil pengukuran dan pengujian tinggi jeruk berdasarkan ukuran
4.8 Pengujian dan Analisa Software
Pembuatan bahasa program dirancang pada software BASCOM AVR dengan menggunakan bahasa Basic. Analisa untuk menjalankan sistem ini adalah:
Untuk mengatur register file mikrokontroler yang digunakan, diberikan program sebagai berikut:
$regfile = "m8535.dat "
Untuk mengatur kecepatan kerja tiap-tiap instruksi pada mikrokontroler dan pemanggilan sub rutin diberikan program sebagai berikut:
$crystal = 12000000
Untuk inisialisasi konfigurasi LCD yang digunakan diberikan program sebagai berikut:
Config Lcdpin = Pin , Db4 = Portc.4 , Db5 = Portc.5 , Db6 = Portc.6 , Db7 = Portc.7 , E = Portc.3 , Rs = Portc.2
Config Lcd = 16x2 Cursor Off
Cls
Untuk inisialisasi pin servo yang digunakan, diberikan program sebagai berikut:
Config Servos = 1 , Servo1 = Portd.4 , Reload = 10 Enable Interrupts
Untuk konfigurasi port input dan output, diberikan program sebagai berikut:
Config Portd.4 = Output Config Portd.5 = Output Config Portd.6 = Output
Config Portd.7 = Output Config Portb.0 = Output Config Portb.1 = Output Portb.0 = 1
Portb.1 = 1
Config Pina.0 = Input Config Pina.1 = Input Config Pina.2 = Input Config Pinb.0 = Input Config Pinb.1 = Input
Untuk inisialisasi setiap dimensi variabel diberikan program sebagai berikut:
Dim Urut As Byte Dim Besar As Byte Dim Sedang As Byte Dim Kecil As Byte Dim Total As Byte Dim Skecil As Bit Dim Konv As Bit Dim Urutb As Byte Dim Uruts As Byte Dim B As Byte Dim S As Byte
Untuk inisialisasi setiap variabel yang direferensikan dengan nama lain diberikan program sebagai berikut:
M1 Alias Portd.6
M2 Alias Portd.7 Dstop Alias Pinb.0 Dstart Alias Pinb.1 Senbesar Alias Pina.1 Sensedang Alias Pina.0 Senkecil Alias Pina.2
Sebagai kondisi awal diberikan program sebagai berikut:
Servo(1) = 160 Servo(2) = 150
Locate 1 , 4
Lcd "PRESS START"
Locate 2 , 6 Lcd "BUTTON"
Untuk dapat mendeteksi tombol start yang ditekan dan menghidupkan motor konveyor, diberikan program sebagai berikut:
If Konv = 0 Then If Dstart = 0 Then Gosub Konv_on Konv = 1 Cls End If End If
Untuk dapat mendeteksi tombol stop yang ditekan dan mematikan motor konveyor, diberikan program sebagai berikut:
If Konv = 1 Then If Dstop = 0 Then Gosub Konv_off Wait 1
Konv = 0 Kecil = 0 Sedang = 0 Besar = 0 Total = 0 Cls
Locate 1 , 4
Lcd "PRESS START"
Locate 2 , 6 Lcd "BUTTON"
End If End If
Untuk dapat mereject jeruk yang terdeteksi besar, diberikan program sebagai berikut:
If Senbesar = 0 Then If Konv = 1 Then Servo(2) = 0 Urutb = 2 End If End If
Untuk dapat mengatur lama waktu pereject besar dalam mereject jeruk, diberikan program sebagai berikut:
B = B + 1
If B >= 10 Then B = 0
Urutb = 3 Else
Urutb = 2 End If
Untuk dapat menghitung jumlah jeruk besar yang terdeteksi oleh sensor, diberikan program sebagai berikut:
Servo(2) = 150 Besar = Besar + 1 Urutb = 1
Untuk dapat mereject jeruk yang terdeteksi sedang, diberikan program sebagai berikut:
If Sensedang = 0 Then If Konv = 1 Then Servo(1) = 0 Uruts = 20 End If End If
Untuk dapat mengatur lama waktu pereject sedang dalam mereject jeruk, diberikan program sebagai berikut:
S = S + 1 If S >= 10 Then S = 0
Uruts = 30 Else
Uruts = 20 End If
Untuk dapat menghitung jumlah jeruk sedang yang terdeteksi oleh sensor, diberikan program sebagai berikut:
Servo(1) = 160 Sedang = Sedang + 1 Uruts = 10
Untuk dapat mendeteksi jeruk kecil dan menghitung jumlah jeruk kecil, diberikan program sebagai berikut:
If Senkecil = 0 Then If Konv = 1 Then Skecil = 1 End If End If
If Senkecil = 1 Then If Skecil = 1 Then Skecil = 0 Kecil = Kecil + 1 End If
End If
Untuk dapat menghitung semua jumlah jeruk yang terdeteksi, diberikan program sebagai berikut:
Total = Kecil + Sedang Total = Total + Besar
Untuk dapat menampilkan semua jumlah jeruk pada lcd, diberikan program sebagai berikut:
If Konv = 1 Then
Total = Kecil + Sedang Total = Total + Besar Locate 1 , 1
Lcd "KCL:"
Lcd Kecil Locate 1 , 9 Lcd "SDG:"
Lcd Sedang Locate 2 , 1 Lcd "BSR:"
Lcd Besar Locate 2 , 9 Lcd "TTL:"
Lcd Total End If
Untuk dapat menghidupkan motor konveyor diberikan sub program sebagai berikut:
Konv_on:
Set M1 Reset M2 Return
Untuk dapat mematikan motor konveyor diberikan sub program sebagai berikut:
Konv_off:
Reset M1 Reset M2 Return
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari hasil perancangan alat hingga pengujian dan pembahasan sistem maka penulis dapat menarik kesimpulan, antara lain :
1. Berdasarkan hasil pengujian sebuah sistem perancangan dan pembuatan penghitung dan pemisah berdasarkan ukuran berbasis mikrokontroller atmega 8535 bekerja dengan baik dalam pengujian .
2. Dari hasil pengujian dalam rangkaian sistem ini terdapat 3 sensor adjustable infrared, yang pertama yaitu sensor yang mendeteksi ukuran jeruk besar, kemudian sensor yang mendeteksi ukuran jeruk sedang, dan yang ketiga sensor yang mendeteksi ukuran jeruk kecil. Setelah perancangan selesai sensor bekerja dengan baik, dan berhasil dalam pengujian.
5.2 Saran
Memandang dari segi penggunaan dan sistem kerja suatu peralatan, maka penulis mempunyai beberapa saran untuk pengembangan alat yang di buat apabila ada pihak yang berminat mengembangkan serta memasarkan alat ini secara luas antara lain.
1. Untuk kedepannya alat ini dapat dikembangkan lagi agar lebih mudah dalam proses penghitung jumlah jeruk, agar dapat lebih meringankan pekerjaan petani dalam proses hitung jumlah jeruk.
2. Sebaiknya untuk mengembangkan alat ini, dalam perancangan dan pembuatan sistem lebih baik apabila penulis selanjutnya menggunakan sensor loadcell untuk mengukur berat benda yang digunakan, agar mempermudah sistem kerja petani dalam sortir dan packing buah.
DAFTAR PUSTAKA
Aritonang, Boas, Drs. 2005. Peralatan Kontrol pada Sistem Tenaga Listrik dan Pnuematik. Medan : PPPG Teknologi Medan
Bejo, A. 2008.C dan AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller ATMega8535, Edisi I. Yogyakarta : Graha Ilmu
Frank D, Petruzella. Elektronik Industri. Yogyakarta: Andi
Ir. Samuel H. Tirtamihardja, MSc.1996. Elektronika Digital. Yogyakarta: Andi.
Iswanto,ST.2008.Mikrokontroller Atmega8535. Yogyakarta: Gava Media.
Setiawan, Afrie.2011. 20 Aplikasi Mikrokontroller Atmega 8535 dan Atmega16 Menggunakan Baskom AVR. Yogyakarta : Andi
http://elektronika-dasar.web.id/teori-elektronika/prinsip-kerja-motor-dc
Diakses tanggal 11 Februari 2017
http://elektronika-dasar.web.id/komponen/driver-kerja-motor-dc-1293d/
Diakses tanggal 11 Februari 2017
http://baskarapunya.blogspot.co.id/2013/01/liquid-crystal-display-lcd-16-x-2.html Diakses tanggal 11 Februari 2017