Diperuntukkan kepada:
Kedua orang tuaku tercinta Bapanda Amir Mandaro Bunsu (alm) dan Ibunda Djauna serta
semua uda dan uniku: kak One, da Mafri Amir, da Maiyon, ni Dewi Asmara, ni Betriati, ni
Fitriati, ni Elni Maire, da Agusman, dan da Novaleon yang selalu memberikan motivasi dan
mendoakan setiap langkah dalam perjuangan mengejar mimpi-mimpiku.
Istriku Tercinta Syatriyati Elhamidiyah dan anak-anakku tersayang Fadhilatil Ulya, Fadhul
Fitra Mulky dan Fadhlul ilmi Al haqqy yang selalu setia mendampingi selama ini, maafkan
papa kalau kadang kalian terabaikan. Doa, ketulusan dan keiklhasan yang kalian berikan
mampu memberikan kekuatan dalam menyelsaikan setiap tahapan pendidikan yang papa lewati.
Serta kedua mertuaku Buya M. Syatar, Uma Hurriyah Syatar yang selalu memberikan
kemudahan setiap datang kesulitan.
Semua guruku dan seluruh teman sejawatku
ii
KATA PENGANTAR
Besarnya kompetisi di pasar bebas mengharuskan pengembangan instrumen yang terus menerus baik dari sisi kualitas, harga maupun keandalannya. Meningkatnya kebutuhan untuk otomatisasi, keamanan dan kenyamanan menggiring orang untuk mengembangkan sensor dan sistem sensor baru dengan prinsip dan metoda yang berbeda-beda. Jumlah sensor dan sistem sensor yang diperlukan juga meningkat. Saat ini teknologi sensor telah memasuki bidang aplikasi baru dan pasar yang semakin meluas seperti otomatif, rumah cerdas (smart home), penelitian, dan teknologi pengolahan. Berdasarkan data mengenai pasar sensor dunia diketahui bahwa perkembangan rata-rata produksi sensor dalam sepuluh tahun terakhir meningkat 4,5% setiap tahunnya.
Untuk memenuhi kebutuhan pasar, para peneliti selalu berupaya meningkat hasil karyanya, salah salah satunya adalah sensor fluxgate. Buku ini membahas tentang prinsip kerja dan perkembangan sensor fluxgate serta parameter-parameter yang mempengaruhinya.
Pada kesempatan ini penulis ingin menyampaikan ucapan terima kasih dan penghargaan yang setinggi-tingginya kepada: Prof. Dr.-Ing. Mitra Djamal, Prof. Dr. Eng. Khairurrijal dan Dr. deddy Kurniadi atas segala , saran dan bimbingannya, Prof. Dr. Z Mawardi Effendi, M.Pd. Selaku Rektor Univesitas Negeri Padang, Drs. Asrul, M.A, Selaku Dekan FMIPA Universitas Negeri Padang (UNP) yang telah memberikan kesempatan kepada penulis untuk menyelesaikan buku in, Dr. Ahmad Fauzi, M.Si. Ketua Jurusan dan Seluruh staf beserta karyawan Fisika FMIPA Universitas Negeri Padang, atas motivasi, kerjasama dan bimbingannya.
Semua pihak yang telah berkontribusi secara langsung maupun tidak langsung baik pada proses penulisan buku ini yang tidak dapat disebutkan satu persatu. Semoga segala amal kebaikan yang telah diperbuat dicatat sebagai amal ibadah oleh Allah SWT dan senantiasa mendapat balasan yang berlipat ganda, Aamiin.
Padang, April 2011
iii
DAFTAR ISIKATA PENGANTAR ... ii
DAFTAR ISI ... iii
DAFTAR LAMPIRAN ... v
DAFTAR GAMBAR DAN ILUSTRASI ... vi
DAFTAR TABEL ... xi
BAB I. Pendahuluan ... 1
Bab II. Teknologi Sensor ... 8
II.1. Sensor, Aktuaktor, dan Transduser ... 8
II.2. Sensor Magnetik ... 9
II.2.1. Sensor Efek Hall ... 11
II.2.2. Sensor Anisotropic Magnetoresistance (AMR) ... 13
II.2.3. Sensor Giant Magnetoresistance (GMR) ... 13
II.2.4. Sensor Giant Magnetoimpedance (GMI) ... 14
Bab III. Sensor Fluxgate dan Perkembangannya ... 15
III.1. Elemen Sensor Fluxgate ... 15
III.2. Fluxgate dan Perkembangannya ... 18
III.3. Prinsip Dasar Pengukuran Fluxgate ... 26
III.4. Prinsip Kerja Fluxgate ... 26
III.5. Penentuan Faktor Demagnetisasi ... 34
III.6. Pembuatan Elemen Fluxgate dengan Cara Konvensional………37
III.7. Rangkaian Pengolah Sinyal Fluxgate ... 41
iv
III.7.1. Rangkaian Eksitasi ... 41III.7.2. Rangkaian Pick-up ... 51
III.8. Kalibrator Sensor Magnetik ... 54
III.8.1. Kalibrator dengan Kumparan Solenoida ... 54
III.8.2. Kalibrator dengan Kumparan Helmholtz ... 55
III.8.3. Kalibrator Berupa Kumparan Helmholtz. ... 58
Bab IV. Parameter Yang Mempengaruihi Keluaran Sensor Fluxgate ... 61
IV.1. Jumlah Lilitan Eksitasi ... 61
IV.2. Pengaruh Jumlah Lilitan Pick-up ... 63
IV.3. Pengaruh Jumlah Lapisan Inti Feromagnetik ... 68
IV.4. Konfigurasi Ukuran dan Jenis Material Inti ... 71
A. Variasi lilitan pick-up dengan ukuran inti berbeda……...71
B. Variasi lilitan pick-up dengan jenis inti berbeda. ... 73
IV.5. Pengaruh Perubahan Temperatur Lingkungan Keluaran Sensor ... 76
DAFTAR PUSTAKA ... 78
LAMPIRAN ... 86
v
DAFTAR LAMPIRAN
Lampiran 1. Tabel Perkembangan Pembuatan Elemen Fluxgate
Berdasarkan Geometri Elemen Fluxgate dan
Karakteristiknya. ... 86
Lampiran 2. Penentuan Medan Magnet Kumparan Helmholt ... 89
vi
DAFTAR GAMBAR DAN ILUSTRASI
Gambar I. 1 Aplikasi Sensor dalam Berbagai Aspek Kehidupan (Yulkifli, 2010) ... 1
Gambar I. 2. Metode pengukuran: Keakuratan dan daerah pengukuran (Djamal, 2006a). ... 2
Gambar I. 3. Tiga komponen utama teknologi sensor (Traenkler, 2001). 4
Gambar II.1. Definisi sensor (Meijer, dkk., 2008)………8
Gambar II.2.Contoh yang menggambarkan sensor, aktuator dan transduser (De Silva, 2007 dan TE, 2010). ... 9
Gambar II.3. Diagram pengelompokan sensor magnetik bersadasarkan magnituda medan magnetik (dimodifikasi dari Macyntyre, 1999). ... 10
Gambar II.4. Konfigurasi sensor efek Hall (Ripka, 2001a). ... 12
Gambar II.5. Konfigurasi sensor AMR (Zorlu, 2008). ... 13
Gambar II.6. Ilustrasi gerakan elektron pada GMR. a) konfigurasi paralel, b) konfigurasi antiparalel (dimodifikasi dari Barnett, 2008). ... 14
Gambar III. 1. (a). Konfigurasi dasar kumparan elemen fluxgate, (b) konfigurasi parallel fluxgate (Ando, dkk., 2006) dan (c) konfigurasi orthogonal elemen fluxgate (Zorlu, 2008)…….16
Gambar III. 2. Sebuah solenoida yang dililitkan secara longgar (a), penampang solenoida dengan abcd adalah lingkar tertutup (b). ... 17
Gambar III. 3. Beberapa aplikasi sensor fluxgate ... 19
vii
(c), Kubik 2006 (d), Ando, dkk., 2006 (e), Bellloy, dkk., 2000 (g), Park, dkk., 2004 (h), Bashirotto dkk., 2006 (I dan j),
Perez, dkk., 2004 (k dan m), dan Kubik, 2006 (l). ... 21
Gambar III. 5. Prinsip pengukuran medan magnet: a) dengan cara langsung; b) menggunakan medan magnet referensi Bref sebagai pembanding terhadap medan magnet yang diukur Bext (dimodifikasi dari Gopel, 1989). ... 26
Gambar III. 6. Prinsip kerja fluxgate (dimodifikasi dari Grueger, 2000). . 27
Gambar III. 7. Skema diagram pengolahan sinyal sensor fluxgate. ... 28
Gambar III. 8. Kurva tegangan keluaran fluxgate dengan medan eksitasi berupa sinus (dimodifikasi dari Liu, 2006). ... 29
Gambar III. 9. Elemen sensor kumparan pick-up ganda dengan inti berbentuk oval. ... 37
Gambar III. 10. Kurva magnetisasi Vitrovac6025. ... 38
Gambar III. 11. Inti berbentuk batang tunggal (Single rod-core). ... 38
Gambar III. 12. Inti berbentuk 2 buah batang (Double rod-core) dengan kumparan pick-up tunggal (singel pick-up), model Facquier. ... 39
Gambar III. 13. Inti berbentuk 2 buah batang (Double rod-core) dan kumparan pick-up ganda (double pick-up), model Forster. 39 Gambar III. 14. Inti berbentuk cincin (ring-core), dengan lilitan mengikuti cincin, model Achenbrenner and Goubau. ... 39
Gambar III. 15. Rangkaian H-bridge eksitasi (Kubik, 2006). ... 43
Gambar III. 16. Osilator astabil dan pembagi frekuensi. ... 44
Gambar III. 17. Rangkaian MOSFET sebagai Inverter. ... 45
viii
Gambar III. 18. Rangkaian generator sinyal sinusiodal eksitasi. ... 46Gambar III. 19. Rangkaian eksitasi sinusiodal. ... 46
Gambar III. 20. Tegangan keluaran sensor terhadap medan magnet eksternal ketika tegangan eksitasi 3 Volt. ... 47
Gambar III. 21. Tegangan keluaran sensor terhadap medan magnet eksternal ketika tegangan eksitasi 5 V ... 47
Gambar III. 22. Tegangan keluaran sensor terhadap medan magnet eksternal ketika tegangan eksitasi 7V. ... 48
Gambar III. 23. Hubungan frekuensi eksitasi terhadap sensitivitas sensor. ... 49
Gambar III. 24. Hubungan frekuensi eksitasi terhadap daya eksitasi. .. 50
Gambar III. 25. Rangkaian osilator kristal dan IC CD4060. ... 50
Gambar III. 26. Bagian pembagi frekuensi CD4060. ... 51
Gambar III. 27. Rangkaian detektor fasa ketika keluaran sensor positif. 52 Gambar III. 28. Rangkaian tapis lolos rendah Sallen-Key. ... 53
Gambar III. 29. Grafik tanggapan frekuensi tapis lolos rendah orde ke-6. ... 54
Gambar III. 30. Kumparan Helmholtz (a) dan arah garis medan magnet untuk kumparan Helmholtz; arah arus searah (b), arah arus berlawanan (c). ... 55
Gambar III. 31. Foto Kalibrator dengan bentuk solenoida. ... 56
Gambar III. 32. Kalibrasi solenoida dengan alat ukur medan magnet standar. ... 57
ix
Gambar III. 34. Kumparan Helmholtz dengan garis induksi oleh arus (a), foto hasil desain kumparan Helmholtz (b). ... 58
Gambar III. 35. Hasil kalibrasi kumparan Helmholtz dengan arus seri 59
Gambar III. 36. Hasil kalibrasi kumparan Helmholtz dengan arus paralel. ... 59
Gambar IV. 1. Hubungan konfigurasi lilitan eksitasi (Nexc ) dengan faktor
demagnetisasi ( D)……….62
Gambar IV. 2. Hubungan konfigurasi lilitan eksitasi (Nexc ) dengan daya eksitasi (Pexc ). ... 62
Gambar IV. 3. Hubungan konfigurasi lilitan eksitasi (Nexc ) dengan sensitivitas sensor Sv. ... 63
Gambar IV. 4. Hubungan konfigurasi lilitan pick-upNpc dengan L. ... 65
Gambar IV. 5 Hubungan faktor demagnetisasi dengan lilitan pick-up. . 66
Gambar IV. 6. Hubungan konfigurasi lilitan pick-up (Npc) dengan daya eksitasi (Pexc). ... 67
Gambar IV. 7. Hubungan konfigurasi pick-up dengan sensitivitas. ... 68
Gambar IV. 8. Hubungan konfigurasi jumlah inti (ninti) dengan faktor demagnetisasi (D). ... 69
Gambar IV. 9. Hubungan konfigurasi jumlah lapisan inti (ninti) dengan daya eksitasi (Pexc). ... 70
Gambar IV. 10. Hubungan konfigurasi jumlah inti (ninti) dengan sensitivitas. ... 70
Gambar IV. 11. Karakteristik keluaran sensor dengan konfigurasi lilitan pick-up: dengan inti Vitrovac 6025X (0.75x0.025mm). ... 72
x
Gambar IV. 12. Karakteristik keluaran sensor dengan konfigurasi lilitan pick-up: dengan inti Vitrovac 6025X (1,5x0,025mm). ... 72
Gambar IV. 13. Karakteristik sensitivitas keluaran sensor dengan konfigurasi lilitan pick-up: untuk ukuran inti berbeda ... 73
Gambar IV. 14. Karakteristik keluaran sensor dengan konfigurasi lilitan pick-up dengan inti Metglas 2705M (2.0x0.025mm). ... 74
Gambar IV. 15. Karakteristik keluaran sensor dengan konfigurasi lilitan pick-up dengan inti Vitrovac 6025X (1.5x0.025mm). ... 75
Gambar IV. 16. Karakteristik sensitivitas keluaran sensor dengan konfigurasi lilitan pick-up: untuk ukuran jenis inti berbeda. ... 75
Gambar IV.17. Pengaruh temperatur lingkungan terhadap tegangan keluaran sensor. ... 76
xi
DAFTAR TABELTabel I. 1. Rentang pengukuran sensor magnetik (Smith, 1998) ... 3
Tabel II.1. Rentangan dan resolusi sensor-sensor magnetik (dirangkum dari Macyntyre, 1999, Kubik, 2006 dan Zorlu, 2008) ……….10
Tabel III 1.Perkembangan teknologi pembuatan elemen fluxgate………22
Tabel III 2. Faktor demagnetisasi global untuk inti berbentuk cincin (ring-core). ... 25
Tabel III 3. Faktor demagnetisasi faktor global untuk racetrack-core (Kubik, 2006). ... 25
Tabel III 4. Bentuk geometri inti feromagnetik elemen fluxgate . ... 40
Tabel IV. 1. Parameter dan hasil pengukuran konfigurasi panjang lilitan eksitasi (lexc) dengan panjang sensor (ls) dijaga tetap…………61
Tabel IV. 2. Parameter dan hasil pengukuran variasi lilitan pick-up dengan panjang sensor (ls) konstan (Z50 to Z56). ... 64
Tabel IV. 3. Parameter dan hasil pengukuran variasi lilitan pick-up dengan panjang sensor (ls) berubah Z57 to Z60. ... 64
Tabel IV. 4. Parameter dan hasil pengukuran konfigurasi jumlah inti feromagnetik. ... 68
Tabel IV. 5. Rangkuman sensitivitas dan daerah linier untuk konfigurasi pick-up dengan ukuran inti berbeda. ... 71
Tabel IV. 6. Tegangan keluaran dan daerah linier sensor untuk konfigurasi lilitan pick-up dengan jenis material inti berbeda. ... 74
ambar I. 1 Aplik
Pemilihan met esolusi, kuat med
akuratan (Djama
BAB I. Pend ng banyak dikem
an pada konsep . Sensor-sensor al dan Setiadi, 20
dahuluan mbangkan saat perubahan med yang menggu 6). Terdapat beb at medan magne dan di sekitar ob unakan konsep berapa metoda ya et antara lain ant
tode pelat Hall d
2
Gambar I. 2. Metode pengukuran: Keakuratan dan daerah pengukuran (Djamal, 2006a).
Gambar I. 2. menunjukkan beberapa metoda yang sering digunakan untuk mengukur medan magnet, antara lain metode resonansi magnetik, metode induksi, metode pelat Hall dan metode fluxgate. Metode resonansi magnetik dijadikan standar utama untuk kalibrasi karena keakuratannya dan linieritas yang tinggi. Pengukuran medan magnet dengan metode pelat Hall dapat mencapai resolusi 10 mT jika menggunakan sinyal eksitasi DC konvensional, tetapi terjadi tegangan induksi secara termal pada kabel dan konektor. Metode pelat Hall sangat berguna untuk pengukuran pada temperatur rendah. Metode fluxgate terlihat pada rentangan pengkuran medan rendah sehingga lebih cocok digunakan untuk aplikasi medan magnet lemah.
Pembuatan sensor magnetik saat ini menggunakan beberapa metode antara lain: metode efek Hall, metode Magnetoresistif (AMR,GMR), metode SQUID dan metode Fluxgate (Fraden, 1996, dan Smith, dkk., 1998). Prinsip kerja sensor magnetik motode efek Hall adalah berdasarkan efek Hall (Goepel, 1989 dan Caruso, dkk., 1998). Kelemahan metode ini adalah sensitivitasnya rendah, offset tegangan yang cukup tinggi dan pengaruh temperatur yang cukup besar. Prinsip kerja sensor magnetik magnetoresistif adalah perubahan resistansi bahan akibat pengaruh medan magnet luar (Saragi, 2005 dan Djamal, dkk., 2006b). Kelemahan sensor magnetik model ini adalah adanya pengaruh efek histeresis, berubahnya sensitivitas sensor terhadap kenaikkan medan magnet H. Metode SQUID memerlukan helium cair atau nitrogen cair dan temperatur tinggi dalam pengoperasiannya dan mempunyai
3
keterbatasan rentangan dinamik, sehingga digunakan untuk keperluan khusus saja (Kubik, 2006a dan Zorlu, 2008).
Pada metoda fluxgate, pengukuran kuat medan magnet didasarkan pada hubungan antara kuat medan magnet H yang diberikan dengan fluks medan magnet induksi B. Jika B yang dihasilkan berasal dari masukan H berupa gelombang pulsa bolak-balik, maka dalam keadaan saturasi pada keluaran B akan timbul gelombang harmonik genap. Gelombang harmonik genap berupa gelombang harmonik ke dua yang besarnya sebanding dengan medan magnet luar yang mempengaruhi inti dan arahnya sebanding dengan arah medan magnet luar tersebut (Gopel, 1989; Ripka, 2001a; Kawahito, 2006 dan Djamal dan Setiadi, 2006a).
Sensor magnetik dengan prinsip fluxgate dapat dipergunakan untuk mengukur medan magnetik DC, sedangkan AC khusus untuk frekuensi rendah dan mempunyai sensitivitas yang sangat tinggi. Kawahito, dkk., (1996) menemukan sensitivitas fluxgate adalah 2700V/T, sedangkan pada efek Hall sekitar 0,5V/T untuk bahan Si, dan pada magnetoresistif sekitar 100V/T. Kelebihan lain fluxgate adalah ukurannya kecil, kebutuhan daya kecil, dan mempunyai kestabilan yang tinggi terhadap temperatur dengan koefisien sensitivitas temperatur 30 ppm/oC dan koefisien offset 0.1 nT (Ripka, 2001a dan Liu, 2006).
magne n magnet yang d t yang terukur b t terukur lebih t pada Tabel I. 1
tik fluxgate sang t yang sangat lem
Tantangan uta n dalam tiga ka diukur lebih kec berada pada1µG besar dari 10 µG 1. Berdasarkan gat cocok diguna
mah.
ma teknologi se g selama ini su nformasi sensor yang sudah d r dan sistem se cocok, penguk ategori, yaitu : cil dari 1 µG), m G sampai 10µG d G, Ketiga kateg Tabel I. 1 terli akan untuk men
ensor masa kini ulit atau tidak r dengan meng an yang tepat t golah sinyalnya. ihat bahwa sen ngukur kuat med
r (Traenkler, 20
antara biaya d
sensor atau sistem sensor ditentukan oleh interaksi yang kuat dari tiga komponen utama pembentuknya, seperti struktur sensor, teknologi manufaktur dan algoritma pengolah sinyalnya (Traenkler, 2001). Perkembangan teknologi sensor juga dipengaruhi oleh perkembangan dari ketiga bidang ini, ketiga komponen tersebut ditunjukkan pada Gambar I. 3.
Semakin banyak langkah-langkah teknologi proses yang dilakukan dalam membuat sensor atau sistem sensor maka akan semakin rumit teknik-teknik yang diperlukan untuk mengatasi efek-efek sensor yang tidak diinginkan. Oleh karena itu untuk mendapatkan kemampuan sensor atau sistem sensor yang optimal perlu dipilih kombinasi yang tepat antara teknologi dengan sistem pengolah sinyal yang digunakan. Sehingga pembuatan sensor dan sistim sensor lebih sederhana dan biaya murah tentunya dengan kualitas yang dapat bersaing dalam pasar nasional maupun internasional (Traenkler, 2001).
Fluxgate memenuhi kriteria di atas dimana prosesnya tidak terlalu komplek kecuali teknologi mikro, sinyal keluaran mudah didigitalisasi, linieritas tinggi, ukuran relatif kecil, dan sensitivitas tinggi (Goepel, dkk., 1989, Ripka, 2001a, dan Djamal, 2005). Sensor fluxgate pada dasarnya terdiri dari dua komponen penting yaitu: elemen fluxgate dan rangkaian pengolah sinyal (Gopel, 1989 dan Ripka, 2001a). Pembuatan elemen fluxgate Untuk meningkatkan daya kerja sensor fluxgate seperti sensitivitas, resolusi dan daerah pengukuran maka kedua hal penting tersebut harus di buat seoptimal mungkin. Berbagai upaya telah dilakukan oleh peneliti untuk mendapatkan karakteristik sensor yang baik antara lain perbaikan pada desain struktur dan ukuran elemen sensor fluxgate.
6
mikro adalah: (1) proses meminiatur dalam pembuatan kumparan dan (2) proses mengintegrasikan inti feromagnetik kedalam kumparan.
Metoda lain pembuatan sensor adalah menggunakan teknologi Printed Circiut Boards (PCB) seperti: (Dezuari, dkk. 1999; Choi, dkk., 2004; Tipek, 2005; Bashiroto, dkk., 2006: Kubik, dkk., 2006: Zorlu, dkk., 2007). Kesulitan dalam teknologi PCB adalah saat memasukkan inti feromagnetik kedalam kumparan. Ketika menyatukan lapisan-lapisan PCB dengan cara pemanasan (anneling) sering merusak permeabilitas inti (Tipek 2005) dan merusak jalur-jalur lilitan kumparan.
Menurut Ripka, (2001a) dan Kubik, (2006) terdapat berbagai bentuk elemen fluxgate yang dikembangkan saat ini antara lain: inti dengan bentuk tunggal (single rod-core): inti dengan bentuk ini memiliki kelemahan karena tidak memiliki medan eksitasi referensi dan garis medan magnetik yang terbuka pada ujung-ujung inti mengakibatkan feedthrough dan noisenya tinggi sehingga jarang digunakan. Peneliti yang pernah mengembangkan ini adalah Rabnovici, dkk ., 1989 dan Zhang, dkk., 1998). Inti dengan bentuk dua buah batang sejajar (Double rod-core) dikembangkan oleh Molodovanu, dkk., 2000 dan Moldovanu, dkk., 2000. Inti bentuk ini hampir sama dengan inti berbentuk tunggal karena mempunyai garis medan terbuka diujung-ujung kumparan. Bentuk terbuka ditempati oleh udara yang menyebabkan relukstansi yang tinggi dibandingkan inti feromagetik sehingga memerlukan arus eksitasi yang tinggi. Kebocoran flux magnetik pada ujung kumparan dapat menganggu sensor lain yang berada didekatnya.
Bentuk inti elemen fluxgate yang sering dikembangkan juga adalah inti dengan bentuk cincin (ring-core). Primdahl, dkk., (1989) dan Ripka, (2003) adalah dua peneliti yang pernah mengembangkan inti berbentuk cincin. Garis medan magnet yang melingkar pada cincin menjadikan kendala dalam menentukan arah medan yang sedang diukur.
Hinnrics, (2001) dan Kubik, (2006) menggembangkan inti berbentuk racetrack-core. Inti bentuk ini memiliki sensitivitas yang tinggi dibandingkan yang lainnya. Sirkuit garis-garis medan yang tertutup di ujung-ujung kumparan membuat keluaran sensor lebih stabil. Selain itu mudah dalam menentukan arah medan yang diukur. Hinnrics membuat elemen fluxgate dengan teknologi mikro sedangkan Kubik menggunakan
7
teknologi PCB. Bentuk-bentuk elemen fluxgate lain dan teknologi yang digunakan dapat dilihat pada Lampiran 1.
8
Bab II. Teknologi Sensor
Pada bab ini dipaparkan tentang kajian pustaka dan teori fluxgate yang di dalamnya mencakup kajian tentang berbagai sensor magnetik kelebihan dan kekurangan dari masing sensor dan perkembangan teknologi pembuatan sensor fluxgate serta aplikasi fluxgate yang berkembang saat ini.
II.1. Sensor, Aktuaktor, dan Transduser
Secara umum sensor didefinisikan sebagai piranti yang mengubah besaran-besaran input fisis seperti: magnetik, radiasi, mekanik, dan termal atau kimia menjadi besaran listrik sebagai output (Meijer, dkk., 2008), seperti terlihat pada Gambar II.1 .
Gambar II.1. Definisi sensor (Meijer, dkk., 2008).
Aktuator adalah piranti yang menggunakan output sensor, mengubah besaran elektrik menjadi besaran lain seperti gerak. Definisi lain meyatakan sensor sebagai fungsi input sedangkan aktuaktor sebagai fungsi output. Sedangkan Tranduser adalah gabungan dari sensor dan aktuaktor. Sebagai contoh (Gambar II.2): mikrofon sebagai perangkat masukkan mengkonversi gelombang suara menjadi sinyal listrik untuk penguat untuk memperkuat, dan loudspeaker yang berfungsi sebagai perangkat keluaran mengubah sinyal listrik kembali ke gelombang suara.
9
Gambar II.2. Contoh yang menggambarkan sensor, aktuator dan transduser (De Silva, 2007 dan TE, 2010).
II.2. Sensor Magnetik
Sensor-sensor yang bekerja berdasarkan perubahan medan magnetik yang terjadi di sekitar benda atau objek yang diukur disebut sensor medan magnet. Berdasarkan magnituda medan magnet, sensor medan magnet dapat dibagi menjadi tipe komponen vektor (vector component) dan berdasarkan skalar (Macyntyre, 1999), seperti ditunjukkan pada
10
Tipe vektor termasuk ke dalam sensor yang digunakan untuk mengukur medan magnet lemah (<1mT) dan medan magnet kuat (>1mT).Instrumen untuk mengukur medan magnet lemah biasa disebut magnetometer dan instrumen untuk mengukur medan magnet kuat disebut gaussmeter. Fluxgate termasuk dalam metode magnetometer. Rentang pengukuran dan resolusi dari masing sensor magnetik dirangkum dalam Tabel II.1.
Gambar II.3. Diagram pengelompokan sensor magnetik bersadasarkan magnituda medan magnetik (dimodifikasi dari
Macyntyre, 1999). Sensor Medan Magnetik
Magnetometers Gaussmeters
Vektor Skalar
Kumparan
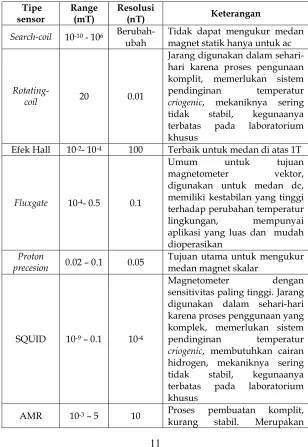
Tabel II.1. Rentangan dan resolusi sensor-sensor magnetik (dirangkum dari Macyntyre, 1999, Kubik, 2006 dan Zorlu, 2008) .
Tipe sensor
Range (mT)
Resolusi
(nT) Keterangan
Search-coil 10-10 - 106
Berubah-ubah
Tidak dapat mengukur medan magnet statik hanya untuk ac
Rotating-coil 20 0.01
Jarang digunakan dalam sehari-hari karena proses pengunaan komplit, memerlukan sistem pendinginan temperatur criogenic, mekaniknya sering tidak stabil, kegunaanya terbatas pada laboratorium khusus
Efek Hall 10-2- 10-4 100 Terbaik untuk medan di atas 1T
Fluxgate 10-4- 0.5 0.1
Umum untuk tujuan magnetometer vektor, digunakan untuk medan dc,
memiliki kestabilan yang tinggi terhadap perubahan temperatur lingkungan, mempunyai aplikasi yang luas dan mudah dioperasikan
Proton
precesion 0.02 – 0.1 0.05
Tujuan utama untuk mengukur medan magnet skalar
SQUID 10-9 – 0.1 10-4
Magnetometer dengan sensitivitas paling tinggi. Jarang
digunakan dalam sehari-hari karena proses penggunaan yang komplek, memerlukan sistem pendinginan temperatur criogenic, membutuhkan cairan hidrogen, mekaniknya sering tidak stabil, kegunaanya terbatas pada laboratorium khusus
AMR 10-3 – 5 10 Proses pembuatan komplit,
12
pesaing dari dari fluxgate Pompa
optik 0.01-0.1 0.005
Resolusi tertinggi, magnetometer skalar
Lebih jauh dibahas beberapa jenis sensor magnetik beserta prinsip kerjanya.
II.2.1. Sensor Efek Hall
Efek Hall ditemukan pertama kali oleh Edwin Hall pada tahun 1879 ketika kuliah di Johns Hopkins University di Baltimore. Ia menyatakan prinsip kerja sensor ini adalah memanfaatkan fenomena efek Hall. Efek Hall ini didasarkan pada efek medan magnetik terhadap partikel bermuatan yang bergerak. Prinsip kerja efek Hall hal ditunjukkan Gambar II.4. Gaya yang bekerja pada partikel bermuatan disebut gaya Lorentz (Fraden, 1996 dan Ripka, 2001a).
Ketika ada arus listrik yang mengalir pada divais efek Hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik, pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan potensial antara kedua sisi divais tersebut disebut potensial Hall. Potensial Hall ini sebanding dengan medan magnet dan arus listrik yang melalui divais.
Gambar II.4. Konfigurasi sensor efek Hall (Ripka, 2001a).
Aplikasi utama sensor efek Hall adalah sebagai sensor posisi dan kecepatan baik linier maupun angular, dan untuk pengukuran arus listrik
13
tanpa kontak. Kelebihan dari sensor efek Hall adalah struktur yang sederhana dan karakteristik yang bagus dalam teknologi fabrikasi mikro. Divais Hall mudah difabrikasi dengan teknologi CMOS dan pengkondisian sinyal elektronik dapat langsung diintegrasikan dengan divais Hall (Ripka, 2001a). Kekurangan sensor ini adalah nilai tegangan offset yang tinggi pada keluaran divais. Penyebab offset ini adalah geometri non-simetrik dari divais karena lapisan yang tidak lurus pada proses fabrikasi, defek permukaan, dan variasi hambatan kontak. Nilai dari tegangan offset juga dipengaruhi oleh suhu dan tekanan divais.
II.2.2. Sensor Anisotropic Magnetoresistance (AMR)
Sensor AMR banyak digunakan sebagai head pembaca dari divais penyimpan magnetik, sensor posisi, dan kompas. Sensor ini dapat mengukur medan magnet sampai 200 μT baik pada medan magnet DC maupun AC dengan sampai beberapa MHz.
14
Gambar II.5. Konfigurasi sensor AMR (Zorlu, 2008).
II.2.3. Sensor Giant Magnetoresistance (GMR)
Efek GMR ini berdasarkan prinsip hamburan bergantung spin. Ketika dua lapisan feromagnetik dipisahkan oleh material konduktor non-feromagnetik dan jika ketebalan struktur sensor lebih kecil dari jarak rata-rata yang ditempuh elektron, akan terjadi hamburan elektron diantara lapisan feromagnetik yang bergantung pada arah momen magnetiknya, prinsip kerja sensor GMR ditunjukkan Gambar II.6 (Barnett, 2008). Jika magnetisasinya searah, hamburan akan minimum dan resistansi struktur akan rendah. Resistansi maksimum akan tercapai ketika magnetisasinya berlawanan arah.
(a) (b)
Gambar II.6. Ilustrasi gerakan elektron pada GMR. a) konfigurasi paralel, b) konfigurasi antiparalel (dimodifikasi dari Barnett, 2008).
II.2.4. Sensor Giant Magnetoimpedance (GMI)
Prinsip sensor ini adalah berdasarkan efek GMI, dimana medan magnet menyebabkan perubahan nilai impedansi yang tereksitasi dengan arus berfrekuensi tinggi. Permeabilitas dan kedalaman permukaan dari lapisan megnetik bergantung pada frekuensi eksitasi sebagai keadaan magnetik aktual dari suatu material. Perubahan permeabilitas dan
15
kedalaman permukaan menyebabkan resistansi dan induktansi material berubah (Ripka, 2003b).
16
Bab III. Sensor Fluxgate dan Perkembangannya III.1. Elemen Sensor Fluxgate
Sensor fluxgate terdiri dari elemen fluxgate dan rangkaian pengolah sinyal. Elemen fluxgate terdiri dari kumparan eksitasi (excitation coil), kumparan pick-up (pick-up coil) dan inti feromagnetik (core), seperti ditunjukkan Gambar III. 1.a (Ando, dkk., 2006). Kumparan eksitasi berfungsi untuk menghasilkan medan eksitasi sedangkan kumparan pick-up berfungsi untuk menangkap perubahan fluks magnetik yang dihasilkan oleh kumparan eksitasi. Perubahan fluks pada kumparan eksitasi disebabkan perubahan sifat magnetisasi bahan inti.
Berdasarkan arah medan eksitasi yang dihasilkan oleh kumparan eksitasi, maka elemen fluxgate terdiri dari dua seperti di tunjukkan Gambar III. 1.b dan Gambar III. 1.c.(Zorlu, 2008), yaitu:
a. Fluxgate paralel: arah medan eksitasi sejajar dengan medan eksternal yang diukur, pada konfigurasi ini, medan eksitasi sejajar dengan medan eksternal. Mekanisme eksitasi dan deteksi saling bergantung satu sama lain sehingga pembuatannya tidak bisa terpisah. Panjang inti dapat mempengaruhi medan eksitasi dan rentang medan magnet yang dapat diukur.
b. Fluxgate orthogonal: arah medan eksitasi tegak lurus arah medan eksternal yang di ukur, Pada konfigurasi ini, medan eksitasi tegak lurus dengan medan eksternal. Desain sensor dengan konfigurasi ini dapat secara terpisah karena tidak bergantung satu sama lain. Panjang inti hanya mempengaruhi rentang medan magnet tapi tidak mempengaruhi medan eksitasi.
Kumparan eskitasi dan pick-up merupakan sebuah kumparan dengan panjang (l) yang diberi sejumlah lilitan (N) dari kawat halus berinsulasi (kawat email). Medan eksitasi yang muncul pada kumparan eksitasi disebabkan oleh arus bolak-balik (i) yang berasal dari rangkaian eksitasi. Untuk memudahkan memahami konsep timbulnya medan eksitasi akan ditinjau konsep medan magnet pada sebuah solenoida (Gambar III. 2).
17
Gambar III. 1. (a). Konfigurasi dasar kumparan elemen fluxgate, (b) konfigurasi parallel fluxgate (Ando, dkk., 2006) dan (c) konfigurasi
orthogonal elemen fluxgate (Zorlu, 2008).
Kumparan solenoida ini akan menimbulkan medan magnet di tengah-tengah kumparan. Medan magnet tersebut dapat diketahui dengan menggunakan hukum Ampere. Ambil daerah cakupan integrasi pada daerah abcd seperti pada Gambar III. 2. Hukum Ampere untuk solenoida diberikan oleh persamaan (III.1),
0
abcda
B.d l =
μ
i
18
Gambar III. 2. Sebuah solenoida yang dililitkan secara longgar (a), penampang solenoida dengan abcd adalah lingkar tertutup (b).
Dengan nilai I adalah arus yang terkandung dalam lengkung abcd. Bila dipisahkan untuk integral bagian ab, bc, cd, dan da, maka integral bagian bc adalah nol karena
d l
= 0, sedangkan bagian cd=0 karena tidak ada medan magnetik diluar solenoida. Akibatnya persamaan (II.1) dapat disederhanakan menjadi (III.2):.
.
abcda ab
B dl
B dl
(III. 2)karena
B
sejajar dengand l
pada ab, maka sudut antara kedua vektor tersebut adalah nol sehingga integral dl=l. Nilai l adalah panjang garis ab..
abB dl
Bl
(III. 3)Bila solenoida dengan panjang l terdapat N lilitan, dan setiap lilitan dialiri arus I, maka persamaan (III.3) dapat ditulis ulang menjadi persamaan (III.4)
19
0
N i
l
B
(III. 4)Berdasarkan persamaan (III.4) terlihat besar medan magnetik B bergantung pada N, i dan l. Bentuk medan eksitasi bergantung kepada sumber arus eksitasi yang diberikan. Secara umum bentuk arus eksitasi dapat berupa sinus, segitiga, persegi atau pulsa yang berubah terhadap waktu (arus ac).
Medan magnet yang dihasilkan oleh arus eksitasi akan menginduksi inti feromagetik sehingga terjadi perubahan fluks magnetik didalam kumparan eksitasi. Perubahan fluks magnetik akan semakin besar sesaui dengan permeabilitas bahan yang digunakan sebagai inti. Laju perubahan fluks magnetik (d
dt
) akan ditangkap oleh kumparan
pick-up dalam bentuk gaya gerak listrik (ggl). Menurut Faraday ggl merupakan tegangan induksi yang dihasilkan oleh sebuah kumparan yang dialiri arus bolak-balik (ac). Tegangan induksi ditunjukkan oleh persamaan (III.5),
d V
dt
, (III. 5)
dengan mensubsitusikan persamaan (III.4) kedalam persamaan (III.5) dan memasukan pengaruh permeabilitas bahan (µb) maka persamaan (III.5)
dapat ditulis ulang menjadi persamaan (III.6).
0 b
dB
V N S
dt
(III. 6)
dimana S adalah luas penampang solenoida, dengan mengambil asumsi bahwa luas penampang solenoida sama dengan luas penampang inti yang digunakan.
III.2. Fluxgate dan Perkembangannya
20
model geometri elemen fluxgate maupun dalam bidang aplikasinya. Beberapa aplikasi sensor fluxgate dapat dilihat pada Gambar III. 3.
Berbagai pendekatan telah dilakukan oleh para peneliti untuk meningkatkan daya kerja fluxgate seperti: sensitivitas, akurasi, resolusi dan lain-lain. Beberapa pendekatan teknologi yang digunakan oleh para peneliti dalam mengoptimasi fluxgate, antara lain teknologi konvensional, teknologi PCB, teknologi mikro dan kombinasi dari ketiganya disebut teknologi hybrid. Setiap teknologi yang digunakan berbeda pada bentuk sensor, material inti, teknologi penanaman inti, dan data kinerja sensor. Keempat teknologi ini berserta contoh elemen sensor yang telah berhasil di kembangkan ditunjukkan Gambar III. 3.
Gambar III. 3. Beberapa aplikasi sensor fluxgate
a. Teknologi konvensional
Teknologi konvensional adalah teknologi manual dimana kawat yang menjadi kumparan eksitasi dan pick-up dililitkan secara manual. Sebagai inti feromagnetik masih menggunakan material buatan industri seperti Vitrovac dan Metglas (Mien, 2000, Djamal, 2002, 2005, dan 2006, Limansyah, 2003, Tipek, 2004 dan Firmansyah, 2006, Suyatno, 2007).
21
b. Teknologi PCBTeknologi ini hanya digunakan untuk menggantikan peranan kawat email yang sering dililitkan secara manual pada kumparan eksitasi dan pick-up. Teknologi PCB dikembangkan semenjak tahun 1999 oleh Dezuari, dkk., dari Swiss Federal Institute of Technology in Lausanne (Switzerland), kemudian menyusul Perez, dkk., 2004 dari Complutense de Madrid and Madrid Polytechnical University (Spain), Choi, dkk., 2004 dari Kangnung National University and Samsung Advanced Institute of Technology in Suwon (Korea), Baschirotto, dkk., 2004 dan 2006 dari University of Lecce and University of Pavia in Italy, Andò, dkk., 2004., dari University of Catania (Italy) and Space and Naval Warfare Systems Center, San Diego (USA), Tipek, dkk., 2005 dan Kubik, dkk., 2006 dari Cezch Tekhnical University, Prague.
Pembuatan elemen sensor dengan teknologi PCB memliki proses yang sederhana dan murah sehingga biayanya murah. Kekuranganya adalah ukuran yang lebih besar dibandingkan konvensional apalagi jika dibandingkan dengan teknologi mikro.
c. Teknologi mikro (microfabrication)
22
Gambar III. 4 Perkembangan teknologi pembuatan elemen fluxgate, Suyatno, dkk., 2007 (a), Mayer, 1999 (b), Tipek, dkk., 2005 (c), Kubik 2006
(d), Ando, dkk., 2006 (e), Bellloy, dkk., 2000 (g), Park, dkk., 2004 (h), Bashirotto dkk., 2006 (I dan j), Perez, dkk., 2004 (k dan m), dan Kubik,
2006 (l).
Pendekatan dengan teknologi mikro mempunyai proses yang sangat komplek sehingga mengakibatkan harga proses pembuatan mahal. Selain itu sensitivitasnya yang dihasilkan rendah karena luas penampang menjadi kecil. Untuk memperoleh sensitivitas yang tinggi diperlukan frekuensi yang tinggi, dan keterbatasan dalam jumlah lilitan dalam solenoida (Ripka, dkk., 2001c, dan Liu, dkk., 2006). Menurut Ripka, (2008) penggunaan inti feromagnetik dalam bentuk padatan (bulk soft magnetik) lebih baik dari pada inti berbentuk film tipis, hal ini dikarenakan besar manget yang terukur bergantung pada luas penampang inti. Sensor dengan proses teknologi mikro memiliki noise yang besar dibandingkan dengan teknologi PCB (Kubik, 2006). Menurut Zorlu, (2008) ketiga pendekatan di atas masih digunakan dan proses pembuatan fluxgate dan fabrikasi divais masih sering dilaporkan.
d. Teknologi Hybrid,
Kombinasi dari teknologi di atas disebut hybrid technology (Dezuari, dkk., 1999). Teknologi ini mengkombinasikan proses pembuatan elemen
23
sensor diantara teknologi beberapa peneliti yang mengkombinasikan ini adalah: Belloy, dkk., 2000, Tipek, dkk., 2005 dan Perez, dkk., 2004.
Selain teknologi pembuatan elemen fluxgate karakteristik keluaran fluxgate sangat ditentukan model geometri elemen fluxgate, jumlah lilitan eksitasi, pick-up, jumlah lapisan dan jenis inti feromagnetik (Gopel, 1989 dan Ripka, 2001a).
Beberapa nilai sensitivitas fluxgate yang telah berhasil diperoleh peneliti sebelumnya antara lain : 0,006 mV/µT (Belloy, dkk., 2000), 3,760 mV/µT (Chiesi, dkk., 2000), 0,028 mV/µT (Ripka, dkk., 2001b), 13,100 mV/µT (Tipek, dkk., 2004), 20 mV/µT (Fan, dkk., 2006), 13,89 mV/µT (Djamal, dkk., 2006a dan 2006c), 0,241 mV/µT (Kubik, dkk., 2006), dan 0,0005 mV/µT (Zorlu, dkk., 2007). Perkembangan penelitian teknologi pembuatan elemen fluxgate dirangkum dalam Tabel III 1
Sedangkan perkembangan desain struktur/geometri elemen fluxgate dapat dilihat pada Lampiran I.
Tabel III 1.Perkembangan teknologi pembuatan elemen fluxgate.
Peneliti/
Metode: photolithography dan chemical etching (teknologi CMOS), inti berbentuk diagonal dengan kumparan eksitasi tunggal (5,3mm2) pada 125
kHz, konsumsi daya 12.5 mW pada 17 mA-pp, frekuensi LPF 80 kHz
±60µT
3,760 mV/ µT
Grueger, dkk., 2001
Sensor tiga dimensi, metode film tipis dengan teknologi CMOS menggunakan inti: Ni81Fe19. (ukuran
15x15,24x3mm), daya 165mW, resolusi 67nT
Metode kombinasi antara teknologi electro-deposition dan PCB dengan inti amorphous Co-P (Co83P17/Co74P26),
frekuensi eksitasi 10 kHz pada saat arus 300 mA-pp.
Dua sumbu X-Y, Metode kombinasi electroplated dengan teknologi MEMS dan sputtering, inti: Ni0.81Fe0.19 (2,6x1,7
±100µT
24
mm), jumlah lilitan eksitasi 49 lilitan dan pick-up 46 lilitan. Daya 8,54mW pada frekuensi eksitasi 1,2MHz (persegi)
Djamal, dkk., 2006a
Inti berbentuk dua sejajar, pick-up tunggal, frekuensi eskitasi 4 Hz frekuensi potong dc LPF sekitar 75 Hz. Kesalahan relatif 4%.
±40µT
13,89 mV/µT
Liu, dkk., 2006
Inti berbentuk ellips dari permalloy : 80% Ni, 5% molybdenum, 15% Fe), pick-up tunggal, dengan perbandingan luas penampang ~1 to 0.2, kebutuhan daya menurun dari 41mW menjadi 1,2mW, tetapi tengangan dan sensitivitas menurun dari 1,5V menjadi 0,3V dan 0,2 mV/µT menjadi 0,13 mV/µT untuk S2/S1.
Inti tunggal berbentuk tegak lurus
dengan electroplated kawat
Ni80Fe20/Cu, konsumsi daya 100mW
dengan frekuensi eksitasi 500 kHz -
20mV/ µT
Bashiroto ,. dkk., 2006a
Metode dengan teknologi PCB. Inti double-axis (6025Z), ukuran 17000x7000x25 µm, kesalahan linier 1,5%. Frekuensi eksitasi 10 kHz dan frekuensi tapis LPF 10Hz
±60 µT
1,25 mV/ µT
Bashiroto ,. dkk., 2006b
Metode mikro-fluxgate:dc magnetron sputering: CMOS, dengan inti Vitrovac 6025X (luas total 450 µm x 450 µm), kesalahan linieritas:1.15%. Frekuensi eksitasi 100kHz dan daya 13,7 mW.
±50 µT
0,45 µV/mT
Tipek, dkk., 2005
Metode Teknologi PCB dengan inti di electro-deposition berbentuk cincin, jumlah lilitan pick-up 60 lilitan arus eksitasi 300 mA-pp, frekuensi eksitasi 150kHz
Metode: deposisi sputering dan dry etching dan evaporasi (CMOS). rata-rata daya disipasi 8.1 mW pada 100 kHz, 100 mA-pp
Teknik: mikro inti berupa kawa halus, dengan noise 0.34 nT untuk double-wire bipolar
30 mV/ µT
Janosek, dkk, 2009.
Metode: teknologi PCB, dengan, kontrol rangkaian eksitasi dengan pulsa 10 kHz, sensitivitas pada 650 mA-pp, linieritas 0,5%
±50 µT
0,615 mV/uT
Lei, dkk., 2009
Metode: teknik Microelectromechanical Systems (MEMS), 3D micro-solenoid, daerah kerja, sensitivitas pada frekuensi eksitasi 40 kHz, 430 mA.
0-80µT
6,7x10-3 mV/uT
Faktor lain yang mempengaruhi keluaran fluxgate adalah faktor demagnetisasi. Faktor demagnetisasi (D) memainkan peranan penting dalam menentukan tegangan keluaran dan noisefluxgate (Primdahl, dkk., 1989, 2002, dan Kubik dan Ripka, 2008). Menurut Hinnrichs, (2001) secara umum faktor demagnetisasi yang mempengaruhi keluaran fluxgate ada dua:
1. Faktor demagnetisasi primer (Dprim), yaitu faktor demagnetisasi yang
disebabkan oleh kumparan primer atau eksitasi (excitation coil). Nilai Dprim dipengaruhi oleh arus eksitasi. Secara teoritik untuk inti
berbentuk tertutup (close circiut core) nilainya sangat kecil bahkan nol, sehingga sering diabaikan, namun dalam prakteknya tidak nol. Menurut Liu, (2006), kecilnya Dprim kemungkinan disebabkan oleh
proses pembuatan inti yang tidak ideal, sehingga dalam analisis pembahasan tidak di perhitungan nilainya.
2. Faktor demagnetisasi sekunder (Dsec), yaitu faktor demagnetisasi yang disebabkan oleh kumparan sekunder (pick-up coil). Nilai Dsec disebabkan oleh medan eksternal yang sedang diukur, sehingga faktor ini akan sangat mempengaruhi tegangan keluaran sensor.
26
Tabel III 2. Faktor demagnetisasi global untuk inti berbentuk cincin (ring-core).
Peneliti, tahun µr [-]
Dimensi sensor A/d
2 x
Tabel III 3. Faktor demagnetisasi faktor global untuk racetrack-core (Kubik, 2006). tebal dari inti.
III.3. Prinsip Dasar Pengukuran Fluxgate
Prinsip fungsional yang mendasar dari sistem fluxgate adalah perbandingan medan magnet eksternal (Bext) yang diukur dengan medan magnet referensi (Bref ) (Gopel, 1989) Pengubahan kuat medan magnet yang akan diukur Bext ke dalam sinyal listrik dapat dilakukan dengan cara langsung. Cara ini memang sederhana, tetapi memberikan hasil yang kurang teliti terutama untuk mengukur medan magnet lemah. Sensor magnetik fluxgate tidak menggunakan cara langsung, tetapi menggunakan medan magnet referensi Bref untuk dibandingkan dengan medan magnet yang akan diukur Bext menggunakan wadah yang diisi dengan bahan inti. Prinsip ini terlihat pada Gambar III. 5.
Gambar III. 5. Prinsip pengukuran medan magnet: a) dengan cara langsung; b) menggunakan medan magnet referensi Brefsebagai pembanding terhadap medan magnet yang diukur Bext (dimodifikasi
dari Gopel, 1989).
III.4. Prinsip Kerja Fluxgate
28
keluaran B akan timbul gelombang harmonik genap. Gelombang harmonik genap berupa gelombang harmonisa kedua, yang besarnya sebanding dengan medan magnet luar yang mempengaruhi inti dan arahnya sebanding dengan arah medan magnet luar.
Sensor magnetik fluxgate dibuat berdasarkan karakteristik inti feromagnetik yang linier. Sebagaimana dijelaskan sebelumnya elemen fluxgate terdiri dari inti feromagnetik dan dua kumparan yaitu kumparan eksitasi dan pick-up. Kumparan eksitasi merupakan kumparan yang digunakan untuk membangkitkan medan magnet eksitasi. Prinsip yang terjadi pada kumparan eksitasi ini adalah medan magnet yang timbul berdasarkan prinsip solenoida, dimana medan magnet timbul akibat adanya medan listrik (Hukum Faraday). Kumparan sekunder adalah kumparan yang berfungsi untuk menangkap perubahan medan magnet yang di timbulkan oleh kumparan eksitasi. Pada kumparan sekunder, medan magnet yang dihasilkan oleh kumparan eksitasi akan diterima oleh kumparan sekunder dan menghasilkan gaya gerak induksi (GGL) induksi.
Gambar III. 6. Prinsip kerja fluxgate (dimodifikasi dari Grueger, 2000).
Perubahan medan magnet luar yang diterima oleh kumparan sekunder ini akan menghasilkan perubahan arus yang dihasilkan. Konfigurasi lilitan yang baik akan meningkatkan ketelitian karena medan yang akan diukur tidak mengalami distorsi yang berasal dari inti. Untuk lebih jelasnya prinsip kerja pengukuran fluxgate dapat dilihat pada
29
Gambar III. 6. Prinsip kerja sensor magnetik fluxgate. (a) Medan eksitasi tanpa medan magnet luar Bext=0; (b) Medan eksitasi dengan medan magnet luar Bext≠0; (c) kurva magnetisasi dalam keadaan saturasi pada Bext=0; (d) kurva magnetisasi dalam keadaan saturasi pada Bext≠0; (e) perubahan fluks terhadap waktu pada Bext=0; (f) perubahan fluks terhadap waktu pada Bext≠0; g) tegangan keluaran sensor pada Bext=0; (h) tegangan keluaran sensor pada Bext≠0 .
Tegangan keluaran Vout dari elemen sensor diolah dengan
menggunakan rangkaian pengolah sinyal. Pengolah sinyal sensor terdiri dari beberapa bagian, yaitu diferensiator, detektor, sinkronisasi fasa, integrator, dan penguat akhir. Secara skematik terlihat pada Gambar III. 7.
Gambar III. 7. Skema diagram pengolahan sinyal sensor fluxgate.
Karakteristik tegangan keluaran fluxgate dipengaruhi oleh banyak faktor antara lain: jumlah lilitan eksitasi dan pick-up, dimensi geometri elemen sensor, sifat dan jenis material inti feromagnetik, jumlah lapisan inti, frekuensi dan arus eksitasi (Ripka, 2001a, Hinnrics, dkk., 2001, Kubik, 2006, Liu, 2006, Djamal, dkk., 2007 dan Janosek, dkk., 2009).
30
sekitar 100000. Penggunaan pita Vitrovac memungkinkan desain sensor dengan ukuran yang cukup kecil dan robas (Moldovanu, dkk., 2000).
Gambar III. 8. Kurva tegangan keluaran fluxgate dengan medan eksitasi berupa sinus (dimodifikasi dari Liu, 2006).
Untuk mengevaluasi tegangan keluaran fluxgate digunakan fungsi transfer. Beberapa peneliti menggunakan beberapa pendekatan dalam merumuskan fungsi transfer antara lain: Gopel, (1989) menggunakan pendekatan melalui persamaan polinomial dari kurva histerisis inti feromagnetik, penggunaan pendekatan polinomial menyederhanakan pembagian ke dalam komponen frekuensi. Perez, (2006) menggunakan pendekatan melalui tinjauan medan koercive, medan saturasi dan magnetisasi. Liu, (2006) menggunakan pendekatan kurva keluaran harmonisa kedua.
Pada penelitian ini fungsi transfer dianalisis mengunakan teknik harmonisa kedua. Gambar III. 8. merupakan bentuk respon sinyal yang dihasilkan oleh rangkaian eksitasi untuk kumparan eksitasi dan medan eksternal (a), Induksi magnet yang (b), Tegangan induksi pada kedua kumparan pick-up (c) dan Tegangan induksi total (d). Medan magnet eksternal Hx akan mengalami modulasi dengan medan magnet pada kumparan pick-up, Hmadalah amplitudo medan eksitasi. Hasil modulasi
ini di tunjukkan persamaan.
t
Induksi magnet yang timbul, dengan anggapan inti linear (Gambar III. 8.b), adalah :
Tegangan induksi yang timbul pada kumparan pick-up (Gambar III. 8.c), dengan jumlah lilitannya Npc (N2) adalah
dengan S adalah luas penampang inti dan μ permeabilitas magnet inti. Sedangkan keadaan saturasi untuk inti di sisi (1) tercapai pada:
2
32
dengan nilai-nilai β ditunjukkan persamaan (III.14),
1
arcsin
Jadi, tegangan total pada kumparan pick-up adalah (Gambar III. 8.d):
1 2
Tegangan pada kumparan pick-up dapat dinyatakan dengan deret Fourier sinus:
sin (
)
nn
v
a
n
t
(III.17)Koefisien Fourier didapatkan dengan:
dengan A adalah daerah-daerah yang menghasilkan tegangan tidak nol. Selanjutnya, integral berbentuk seperti di atas diselesaikan dengan cara:
Integral ini diterapkan pada perhitungan koefisien Fourier:
Sifat gabungan nilai-nilai cosinus dalam bentuk di atas adalah sebagai berikut. Jika n ganjil, maka
34
Penyederhanaan dilakukan dengan memanfaatkan:
Jika persamaan (III.26) dan (III.27) ini dimasukkan ke dalam persamaan (III. 24) dan (III.25)maka didapat persamaan (III.28)
Kemudian dengan mengembalikan A dan B ke dalam bentuknya semula:
35
Persaman (III. 29) adalah amplitudo harmonik kedua dalam persamaan (III. 24) untuk tegangan keluaran.
Sensitivitas didapatkan dengan mengambil turunan dari amplitudo harmonik kedua tegangan pick-up terhadap magnet magnet luar, dihitung pada saat medan luar sama dengan nol:
2 2 2Berdasarkan persamaan (III.31), untuk nilai medan eksitasi yang tetap (Hm) maka sensitivitas ditentukan oleh jumlah lilitan, luas penampang inti, dan frekuensi sinyal ekstasi. Karena itu, dengan menambah jumlah lilitan pick-up tanpa mengubah faktor geometri dan lilitan eksitasi, diharapkan sensitivitas meningkat.
III.5. Penentuan Faktor Demagnetisasi
Berdasarkan hukum Faraday, tegangan induksi yang dihasilkan oleh sebuah kumparan magnet adalah:
36
Perubahan tegangan keluaran sensor pada kumparan pick-up dapat
dilihat melalui perubahan permeabilitas inti terhadap waktu
d
a
t
dt
permeability. Hubungan apparent permeability dengan faktor demagnetisasi (D) dirumuskan oleh Primdahl, dkk., 1989 sesuai dengan persamaan (III.34) :Subsitisi persamaan (III.34) kedalam persamaan (III.33) kemudian di diferensialkan terhadap waktu diperoleh persamaan (III.35)
Dari persamaan (III.35) terlihat jelas hubungan antara tegangan keluaran sensor dengan faktor demagnetisasi bahan. Tegangan keluaran sensor akan meningkat jika faktor demagnetisasi mengecil dan sebalikya. Tegangan maksimun akan diperoleh saat D = 0, tegangan akan nol jika D=1. Nilai faktor demagnetisasi dapat dihitung dengan mengukur dimensi geometri dan nilai induktansi diri elemen sensor.
Menurut Primdahl, (1989) fluks magnetik dari sebuah solenoida dapat diungkapkan dalam bentuk persamaan (III.36)
37
2
0
c
LI
I N
d S
coil
(III.36)dimana, N adalah jumlah lilitan, d nilai yang berhubungan dengan panjang solenoid, (jika l >>, maka d ~ l) dan S luas penampang kumparan. Berdasarkan definisi induktansi diri persamaan (III.37), maka didapatkan nilai indukstansi diri untuk sensor yang diberi inti (Lcore) dan tanpa inti (Lcoil) sebagai berikut :
dengan mengurangkan persamaan (III.37) dengan (III.38) kemudian membaginya dengan persamaan (III.38), maka diperoleh persamaan (III.39) yang menyatakan bersaran permeabilitas apperent.
1.
Nilai D dapat dihitung setelah menghitung apparent permeabilitas di atas menggunakan persamaan (III.40)
1
Jika kita ingin meninjau faktor demagnetisasi untuk elemen inti berbentuk recetrack core dari segi dimensi elemen fluxgate maka persamaan (III.40) kurang lengkap. Kubik, (2006), mencoba melakukan perhitungan faktor demagnetisasi untuk inti berbentuk oval menggunakan persamaan empirik seperti ditunjukkan persamaan (III.41).
38
dimana l, d adalah panjang dan lebar elemen fluxgate dalam bentuk racetrack core, sedangkan T, t adalah tebal dan lebar inti yang digunakan.
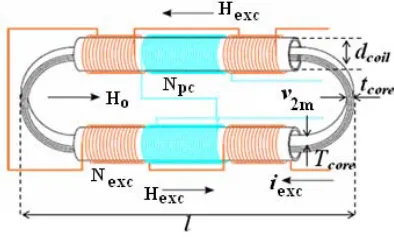
III.6. Pembuatan Elemen Fluxgate dengan Cara Konvensional Teknologi konvensional adalah teknologi manual dimana kawat yang menjadi kumparan eksitasi dan pick-up dililitkan secara manual. Sebagai inti feromagnetik masih menggunakan material buatan industri seperti Vitrovac dan Metglas. Desain elemen fluxgate dengan metode konvensional yang dibuat ditunjukkan Gambar III. 9. Hexc adalah medan yang dihasilkan oleh kumparan eksitasi, Ho medan eksternal, Iexc arus yang dialirkan ke kumparan eksitasi, Nexc jumlah lilitan eksitasi, Npc jumlah lilitan pick-up , Tcore lebar inti feromagnetik , tcore tebal inti, dcoil diameter kumparan , V2m tegangan keluaran harmonisa kedua dari sensor,dan l panjang sensor.
Gambar III. 9. Elemen sensor kumparan pick-up ganda dengan inti berbentuk oval.
Dalam penelitian material ini yang digunakan sebagai inti feromagnetik adalah bahan Vitrovac 6025X dan Metglas 2705M, material ini terdiri dari campuran berbagai macam unsur, yaitu Co66.5 Fe3.5 Si12 B18.
Material ini memiliki permeabilitas cukup tinggi yaitu 105. Material
yang digunakan sebagai inti feromagnetik adalah bahan Vitrovac 6025X dan Metglas 2705M, material ini terdiri dari campuran berbagai macam unsur, yaitu Co66.5 Fe3.5 Si12 B18. Material ini memiliki permeabilitas
cukup tinggi yaitu 105. Kurva karakteristik magnetisasi Vitrovac 6025
dapat dilihat pada Gambar III. 10.
39
0
μH (mT)
0
J = μM
χ = 1870
0 k
μH 0.34
Gambar III. 10. Kurva magnetisasi Vitrovac6025.
Desain elemen sensor ini memiliki beberapa perbedaan dengan model elemen sensor yang telah dikembangkan oleh peneliti lain, terutama yang dikembangkan oleh Grueger dan Gottfried, (2000) yang menggunakan dua inti simetri sejajar, model ini memiliki kelemahan yaitu medan eksitasi antara kedua sisi cendrung tidak sama besar nilainya. terbukanya fluks magnetik diujung kumparan sehingga cendrung terjadi gangguan (noise).
Menurut Ripka, (2001a), Kubik, (2006) dan Zorlu, (2008) bentuk inti feromagnetik yang sering di gunakan elemen fluxgate adalah bentuk single rod-core, double rod-core, ring-core dan racetrack-core (oval), seperti ditunjukkan Gambar III. 11 sampai dengan Gambar III. 14.
40
Gambar III. 12. Inti berbentuk 2 buah batang (Double rod-core) dengan kumparan pick-up tunggal (singel pick-up), model Facquier.
Gambar III. 13. Inti berbentuk 2 buah batang (Double rod-core) dan kumparan pick-up ganda (double pick-up), model Forster.
Gambar III. 14. Inti berbentuk cincin (ring-core), dengan lilitan mengikuti cincin, model Achenbrenner and Goubau.
41
Tabel III 4. Bentuk geometri inti feromagnetik elemen fluxgate .
Bentuk Inti Kelebihan Kelemahan
Single rod-core (Rabinovici, dkk. 1989 & Zhang,dkk., 1998)
Pembuatan elemen fluxgate lebih sederhana
terutama untuk teknologi konvensional.
Feedthrough yang tinggi terhadap pick-up dan medan garis magnetik terbuka diujung-ujung inti. Tidak mempunyai medan eksitasi referensi sebagai pembanding sehingga sinyal frekuensi dasar pada kumparan pick-up tidak bisa dihilangkan, akibatnya noisenya besar
Double rod-core
(Molodovanu , A, dkk., 2000 , Moldovanu,
C., dkk 2000)
Dapat menghilangkan sinyal frekuensi dasar yang tidak diinginkan pada pick-up coil.
Saat pengukuran mudah menentukan arah medan eksternal yang terukur
Adanya sirkuit magnetik terbuka pada koil eksitasi dan inti. fluks magnetik yang melalui inti harus dekat satu sama lain karena adanya udara yang memisahkan dua inti tersebut. Udara memiliki reluktansi magnetik yang tinggi dibanding inti feromagnetik. Sehingga saturasi magnetiknya membutuhkan arus eksitasi yang lebih tinggi. Kebocoran fluks magnetik pada ujung inti dapat mengganggu sensor lain. Ring-core
(Primdahl, dkk., 1989: 2002 dkk., dan Ripka, 2003)
Saturasi yang bagus dengan arus eksitasi
rendah dan memungkinkan untuk
mengubah feedthrough dengan memutar inti di dalam kumparan pick-up.
42
III.7. Rangkaian Pengolah Sinyal FluxgateUntuk menghasilkan sensor fluxgate dengan karakteristik yang baik dibutuhkan rangkaian pengolah sinyal (RPS) dan elemen fluxgate yang optimum. Secara umum RPS fluxgate terdiri dari 2 bagian, yaitu: rangkaian eksitasi dan rangkaian pick-up. Sedangkan elemen fluxgate terdiri dari tiga komponen utama yaitu inti feromagnetik, kumparan eksitasi dan pick-up. Pada bagian ini akan dijelaskan tentang rangkaian eksitasi dan pick-up.
III.7.1. Rangkaian Eksitasi
Bagian dasar dari fluxgate adalah kumparan eksitasi. Kumparan eksitasi akan menghasilkan medan magnet eksitasi (
H
exc) sebagai medan referensi dalam mengukur perubahan medan magnet eksternal (H
ext). Nilai bergantung pada jumlah lilitan kumparan eksitasi (N
exc), daya eksitasi (P
exc) dan frekuensi eksitasi (f
exc). adalah daya yang digunakan untuk membangkitkan (mendrive) rangkaian eksitasi. Frekuensi eksitasi adalah frekuensi yang digunakan dalam gelombang eksitasi yang dihasilkan oleh arus eksitasi. Daya eksitasi ditentukan oleh arus eksitasi yang dapat berupa gelombang sinus, segitiga, pulsa atau persegi (Gopel, dkk., 1989, Ripka, 2001a dan Kubik, 2006).Untuk mengoptimumkan medan eksitasi yang dihasilkan maka diperlukan daya eksitasi optimum (
P
om). didefinisikan sebagai daya yang dapat membangkitkan intensitas magnetik eksitasi maksimum di dalam inti ( Liu, 2006). merupakan syarat utama dari agar inti cepat mengalami saturasi atau berhubungan degan kedalaman saturasi (deep saturation) dari inti sensor (Kubik, 2006).Beberapa peneliti mengoptimasi daya eksitasi untuk memperoleh daya yang rendah dengan berbagai cara antara lain rangkaian pembangkit gelombang eksitasi (Ripka, 2001c, Tipek, dkk., 2005, Kubik 2006 dan Janosek, dkk., 2009), dan mendesain geometri elemen fluxgate (Hinnrics, dkk., 2001, Liu, 2006, dan Wu, dkk., 2009), Duffy, (2005) menggunakan saturable inductor untuk rangkaian eksitasinya. Sementara itu Kubik, dkk., (2007) menggunakan gate diffrential integrator untuk menurunkan konsumsi daya sensor.
exc
H
exc
P
om
P
om
P
P
exc43
Berikut beberapa rangkaian eksitasi yang digunakan oleh para peneliti sebelumnya.
1. Gelombang sinus eksitasi (sine wave excitation).
Parameter untuk gelombang sinus eksitasi untuk sensor mikro-fluxgate diberikan oleh Ripka, (2001b) sensitivitas maksimum 28 V/T diperoleh saat amplituda arus 180 mA pp dan frekuensi 1 MHz dengan jumlah lilitan eksitasi dan pick-up masing-masing 40 lilitan. Tipek, dkk., (2004) menggunakan arus eksitasi dengan rentangan 25-180 kHz . Frekuensi eksitasi 150 kHz dan arus eksitasi 850 mA pp digunakan untuk mendapatkan sensitivitas maksimum. Dilaporkan sensitivitas yang diperoleh 1800 V/T dengan jumlah lilitan eksitasi 40 lilitan dan pick-up 60 lilitan. Kemudian keluaran dari pick-up ditala (tuned) dengan memasang kapasitor (11nF) secara paralel dan diperoleh sensitivitas lebih tinggi yaitu 13100 V/T dan konsumsi dayanya 260 mW. Kubik, (2006) memperoleh sensivitas 1680 V/T untuk arus eksitasi 300 mA p-p, frekuensi 50 kHz dan 6150 V/T untuk arus 500 mA p-p, frekuensi 200 kHz, kedua nilai sensitivitas ini diperoleh saat menggunakan jumlah lilitan pick-up 29 lilitan sehingga sensitivitas/lilitanya adalah 58V/T/lilitan (50 kHz) dan 212V/T/lilitan (200 kHz).
2. Pulsa eksitasi
44
Gambar III. 15. Rangkaian H-bridge eksitasi (Kubik, 2006).
Rangkaian di atas dapat divariasikan frekuensi mulai dari 0 sampai 1,7 MHz dengan duty cycle pulsa eksitasi 1.56% sampai 50 %. Amplitudo arus eksitasi diatur dengan suplai tegangan dari H-bridge. Kubik, (2006) menggunakan gelombang eksitasi berupa pulsa dengan amplitudo arus 300 mA pp, duty cicle 6.25% pada frekuensi 10 kHz diperoleh sensitivitas 1500 V/T dengan jumlah lilitan eksitasi 84 lilitan dan pick-up 94 lilitan dibutuhkan daya 20 mW. Sementara itu Ripka, (2001c), menggunakan arus 180 mA pp dengan duty cicle 20% diperoleh sensitivitas 2 kali lebih tinggi dibandingkan menggunakan arus berupa gelombang sinus.
Untuk meninjau arus eksitasi maksimum (
I
max) kami menggunakanpendekatan persamaan yang telah dirumuskan oleh L. Sibin, (2006). Perbedaan terletak pada luas penampang inti yang digunakan. Pada desain elemen sensor yang kami buat digunakan
S
exc
S
pcandexc pc r
, sehingga persamaan dapat ditulis ulang menjadi persamaan (III.42).
max
1
1
(
1)
exc pc r in pc
exc
I
l
l
D
H
N
(III. 42)45
dimana
l
exc,N
exc adalah panjang dan jumlah lilitan eksitasi, sedangkanpc
l
,
pc adalah panjang dan permeabilitas untuk kumparan pick-up.in pc
H
adalah amplitudo intensitas magnetik dalam kumparan pick-updan
D
adalah faktor demagnetisasi. Terlihat pada persamaan (III.36) bahwa arus eksitasi dipengaruhi oleh faktor demagnetisasi. Liu, (2006) mengabaikan pengaruh D dalam perhitungan dan menganalisis daya eksitasi sensor. Pada desain sensor yang dikembangkan akan ditinjau pengaruh faktor demagnetisasi terhadap daya eksitasi.Rangkaian ini dibuat untuk mengetahui pengaruh perubahan frekuensi terhadap keluaran sensor dan untuk mengetahui konsumsi daya yang terpakai pada sensor. Untuk memvariasikan frekuensi pada eksitasi digunakan rangkaian osilator astabil dengan IC timer 555, seperti ditunjukkan Gambar III. 16.
Gambar III. 16. Osilator astabil dan pembagi frekuensi.
46
digunakan untuk menala duty cicle, untuk rangkaian duty cicle yang digunakan 50%. Rangkaian pembagi frekuensi diperlukan karena dalam menangkap respon digunakan teknik harmonisa kedua (V2m), dimana
frekuensinya 2 kali frekuensi eksitasi (2ωo).
Rangkaian osilator ini disambungkan ke rangkaian eksitasi. Rangkaian eksitasi yang digunakan terdiri dari dua transistor MOSFET yang berbeda tipe, n-MOS dan p-MOS (Gambar III. 17), dimana dua MOSFET ini berfungsi sebagai CMOS inverter (BS 250 dan 170).
Gambar III. 17. Rangkaian MOSFET sebagai Inverter.
Dalam sistem bertahap kadang kala memiliki impedansi masukan yang kecil, atau impedansi keluarannya besar. Sehingga diperlukan rangkaian buffer. Rangkaian buffer yang ideal memiliki penguatan satu dengan impedansi masukan yang sangat besar dan impedansi keluaran yang sangat kecil. Untuk menguatkan arus sebelum sinyal masuk ke dalam MOSFET, terlebih dahulu sinyal dilewatkan pada 6 gerbang NOT dari IC CD4069 yang dirangkai secara paralel.
Pada rangkaian CMOS (Complementary MOS), ketika Vi =Vcc, T1
dalam keadaan On, dan T2 dalam keadaan Off. Keluaran Vo akan sama
dengan 0, karena transistor terhubung secara seri. Sebaliknya ketika Vi sama dengan 0, T1 dalam keadaan Off dan T2 dalam keadaan On. Pada
keadaan ini keluaran sama dengan Vcc. Rangkaian logika seperti ini memiliki kelebihan dibandingkan TTL karena memiliki daya disipasi yang lebih rendah serta arus keluaran yang lebih tinggi, sehingga rangkaian ini cocok sebagai buffer. Untuk menghasilkan keluaran eksitasi berupa gelombang sinus dipasang rangkaian generator sinusoidal.
47
Rangkaian ini terdiri dari induktor, resistor dan kapasitor seperti pada Gambar III. 18.
Gambar III. 18. Rangkaian generator sinyal sinusiodal eksitasi.
Gambar III. 19. Rangkaian eksitasi sinusiodal.
Rangkaian lengkap eksitasi yang digunakan yang digunakan ditunjukkan Gambar III. 19.Setelah rangkaian eksitasi, dan pick-up selesai dibuat maka dilakukan pengukuran untuk melihat frekuensi maksimum yang dibutuhkan.
1. Hubungan medan eksternal terhadap tegangan keluaran sensor (V2m)
dengan variasi frekuensi eksitasi.
Untuk melihat hubungan medan eksternal terhadap tegangan keluaran sensor (V2m) maka dilakukan dengan memvariasikan frekuensi eksitasi
untuk tiap tegangan sumber eksitasi (3, 5, dan 7 Volt). Medan eksternal ±50 µT diberikan pada daerah sekitar sensor untuk mendapatkan V2m.
48
Gambar III. 20. Tegangan keluaran sensor terhadap medan magnet eksternal ketika tegangan eksitasi 3 Volt.
Gambar III. 21. Tegangan keluaran sensor terhadap medan magnet eksternal ketika tegangan eksitasi 5 V
Berdasarkan ketiga variasi tegangan sumber eksitasi di atas terlihat bahwa nilai V2nd maksimum terlihat pada frekuensi 4 kHz, hal ini
dapat juga dillihat dari nilai sensitivitas keluaran pada masing-masing variasi frekuensi. Sensitivitas masing-masing variasi frekuensi diperoleh dengan mencari daerah linier kemudian membuat persamaan regresi
49
masing-masing keluaran. Hasil sensitivitas ini ditunjukkan Gambar III. 23.
Terlihat sensitivitas maksimum keluaran sensor diperoleh saat frekuensi eksitasi 4 kHz, dengan sumber tegangan eksitasi 5 Volt. Secara teori sensitivitas meningkat dengan naiknya frekuensi eksitasi karena tegangan keluaran sebanding dengan frekuensi eksitasi (Ripka 2001). Tetapi data yang kita peroleh V2nd hanya maksimum pada nilai tertentu
yaitu 4 kHz sedangkan untuk frekuensi yang lebih tinggi nilai V2nd
sensor menurun, hal ini kemungkinan disebabkan oleh pengaruh arus eddy. Efek arus eddy sering muncul saat menggunakan frekuensi yang lebih tinggi. Selain itu jika frekuensi terlalu tinggi akan menyebabkan parasit kapasitansi pada kumparan pick-up sehinga kumparan terindukstansi. Parasit kapasitansi akan lebih besar pengaruhnya manakala medan eksternal makin tinggi (Ripka, 2001a).
50
Gambar III. 23. Hubungan frekuensi eksitasi terhadap sensitivitas sensor.
2. Hubungan Frekuensi terhadap daya eksitasi dengan variasi tegangan sumber eksitasi.
Untuk melihat besar daya yang terpakai pada saat frekuensi eksitasi divariasikan maka dilakukan pengukuran besar tegangan dan arus yang ada pada bagian eksitasi. Hasil pengukuran di tunjukkan oleh Gambar III. 24. Berdasarkan Gambar III. 24 diperoleh daya eksitasi untuk tegangan sumber eksitasi 5 Volt dan frekuensi 4 kHz sebesar 10.11 mW, sedangkan untuk 7 Volt diperoleh daya eksitasi lebih tinggi yaitu 17. 73 mW.
51
Gambar III. 24. Hubungan frekuensi eksitasi terhadap daya eksitasi.
Gambar III. 25. Rangkaian osilator kristal dan IC CD4060.
Berdasarkan optimasi di atas dibuat rangkaian eksitasi dengan frekuensi eksitasi 4 kHz dan sumber tegangan eksitasi 5 Volt dengan gelombang eksitasi berupa gelombang sinus dengan teknik harmonisa kedua. Untuk memperoleh frekuensi eksitasi yang lebih stabil sebesar 4 kHz maka digunakan digunakan osilator yang stabil. Hal ini disebabkan karena stabilitas dari frekuensi medan yang dihasilkan tergantung kepada stabilitas osilator. Untuk mendapat kestabilan maka digunakan kristal. Gambar III. 25 menunjukkan rangkaian osilator kristal.
0 15 30 45 60 75
0 5 10 15 20 25
D
a
y
a
(
m
W
)
Frekuensi eksitasi (kHz)