PENDETEKSI OBJEK PADA ROBOT BERGERAK
OTONOM DENGAN METODE GEOMETRI
MOMENTS INVARIANT DAN JST
OLEH :
BAYU RASA SEGARA
09111001011
JURUSAN SISTEM KOMPUTER
FAKULTAS ILMU KOMPUTER
UNIVERSITAS SRIWIJAYA
TAHUN 2018
HALAMAN PERSEMBAHAN
“sungguh atas kehendak Allah semua ini terwujud, tiada kekuatan kecuali dengan pertolongan Allah"
(QS. Al-Kahfi : 39)
~This is for you, father mother and my sisters~
Karya ini ku persembahkan untukmu, Ayah dan Emak. Yang senantiasa bersabar dan mendukungku dengan lantunan do’a
yang engkau panjatkan untukku.
Serta saudariku Yuk Ayu yang juga senantiasa berdo’a dan selalu mendo’akan adik bungsunya ini.
Hanya sebuah karya kecil dan untaian kata-kata ini yang dapat kupersembahkan kepada kalian.
7
KATA PENGANTAR
Puji syukur penulis panjatkan kepada Allah SWT atas limpahan berkah, rahmat, taufik dan hidayah-Nya sehingga penulis dapat menyelesaikan tugas akhir
dan menyusun laporan tugas akhir yang berjudul “Pendeteksi Objek Pada Robot Bergerak Otonom Dengan Metode Geometri Moments Invariant dan JST“,
dibuat dalam rangka memenuhi persyaratan untuk menyelesaikan pendidikan di jurusan Sistem Komputer Fakultas Ilmu Komputer Universitas Sriwijaya.
Dalam penulisan Tugas Akhir ini penulis menyadari bahwa penulis banyak sekali mendapat dukungan dari berbagai pihak. Oleh karena itu dalam kesempatan ini penulis ingin mengucapkan terima kasih kepada :
1. Allah Subhanahu Wa Ta'ala karna berkat dan rahmat-Nya penulis dapat menyelesaikan tugas akhir ini.
2. Nabi Muhammad Shallallahu Alaihi Wasallam serta seluruh pengikutnya hingga akhir jaman
3. Terimakasih banyak penulis ucapkan kepada kedua orang tuaku Rasidik, S.Pd. M.Si dan Sahima, S.Pd, serta saudariku Ayu Rasa Bela, M.Pd beserta suami Muhammad Yunus, S.Pd yang selalu memberikan semangat,dukungan dan doa yang terbaik, serta pertolongan baik moril maupun materil.
4. Terima kasih banyak kepada dosen pembimbingku Ibu Prof. Dr. Ir Siti Nurmaini, M.T yang telah membimbing mahasiswamu ini dari awal hingga dapat menyelesaikan skripsi.
5. Terima kasih banyak kepada dosen penguji Bapak Ahmad Zarkasi, M.T dan Bapak Huda Ubaya, M.T selaku Dosen penguji sidang Tugas Akhir serta memberi banyak masukan untuk perbaikan tugas akhir ini
6. Terima kasih juga kepada teman-teman terdekatku Velia Yuliza, M. Hafizh, Yogi Duta, Ahmad Zaki, Abdurahman, Abda Barias S, Syarif Husen, Faris Humam, Prasojo, Lubie, Theo, Maulana, Kharisma, Oktarian, Indro, Ojan, Hanif, Aprizal Ardi, Lukie, Rendika, Isma Agustina, Asia M, Agus, Imam, Robby, Satria, Dimas, Ridwan Z, Akram, Pramudya, serta
khusus teman seperjuangan SK 2011 yang semuanya tidak dapat disebutkan satu persatu, serta angkatan 2009, 2010, 2012, 2013.
7. Terima kasih kepada anak-anak GGS, Melati Kost, Kontrakan rumah Kuning indralaya, Kontrakan KM 9, Team Clambing & Skate.
8. Terimakasih kepada Bapak Rossi Pasarella, M.Eng. Selaku Kajur Sistem Komputer, Bapak Sutarno, M.T. Selaku Sekjur Sistem Komputer dan Bapak Firdaus, M.Kom, Selaku Pembimbing Akademik serta Mbak Iis dan Kak Reza selaku Admin Jurusan Sistem Komputer Fakultas Ilmu Komputer Universitas Sriwijaya.
9. Civitas akademika Jurusan Sistem Komputer Fakultas Ilmu Komputer Universitas Sriwijaya.
Penulis menyadari bahwa baik isi maupun penyajian laporan ini masih jauh dari kesempurnaan, oleh karena itu Penulis mengharapkan saran dan kritik yang sifatnya membangun untuk perbaikan laporan ini. Penulis berharap semoga Laporan Tugas Akhir ini dapat menambah pengetahuan serta dapat menunjang perkembangan ilmu pengetahuan khususnya bagi Penulis maupun pembaca khususnya mahasiswa / mahasiswi Fakultas Ilmu Komputer Universitas Sriwijaya..
Wassalammu’alaikum Wr.Wb.
Indralaya Juli 2018
9
OBJECT DETECTION ON AUTONOMIC MOVEMENT
ROBOT WITH GEOMETRY MOMENTS
INVARIANT METHODS AND JST
Bayu Rasa Segara (09111001011)
Computer Engineering Department, Faculty of Computer Science Sriwijaya University
e-mail: [email protected]
Abstract
Mobile robot is research field which many researcher make innovation to make robot more perfect and close to human ability, one of them is to see and recognize the object. Robot use geometry moments invariant and artificial neural network backpropagation in this research so mobile robot can recognize object cube, pyramid, and ball. Geometry moment invariant is one of methods on image processing which can identify object to characterize target object with other object. Artificial neural network is a methods to introduction pattern where does it work is like human brain to get information and learning. On the test result which has been done in this research, the result obtained on the introduction of trained data with accuracy 100% and realtime testing by taking distance 40cm can get 100% accuracy, on testing with distance 80cm can get 66,67% accuracy, while testing with distance 120cm can get 30% accuracy. Robot movement with realtime testing can work perfectly and when robot is given ball obstacle then robot will be stop, when it is given pyramid obstacle then robot will move to the right and it will move to the left if there is a cube obstacle in front of the robot, robot will move straight
forward when it doesn’t detect obstacle in front of it.
Keywords : Raspberry Pi, Thresholding, Geometry Moments Invariant, Artificial Neural Network, Backpropagation.
PENDETEKSI OBJEK PADA ROBOT BERGERAK
OTONOM DENGAN METODE GEOMETRI
MOMENTS INVARIANT DAN
JST
Bayu Rasa Segara (09111001011)
Jurusan Sistem Komputer, Fakultas Ilmu Komputer Universitas Sriwijaya
e-mail: [email protected]
Abstrak
Mobile robot merupakan bidang penelitian yang banyak dilakukan inovasi oleh para peneliti untuk membuat robot yang semakin sempurna dan mendekati kemampuan manusia, salah satunya untuk melihat dan mengenali objek. Pada penelitian ini dengan menggunakan geometri moments invariant dan jaringan syaraf tiruan backpropagation maka mobile robot dapat mengenali objek kubus, limas dan bola. Geometri moments invariant merupakan salah satu metode pada pengolahan citra yang mampu mengidentifikasi objek untuk mencirikan objek target dengan objek lain. Jaringan syaraf tiruan adalah metode untuk pengenalan pola dimana cara kerjanya meyerupai otak manusia untuk mendapatkan informasi dan pembelajaran. Pada hasil pengujian yang telah dilakukan pada penelitian ini, hasil yang didapat pada pengenalan data terlatih dengan akurasi 100% dan pengujian secara realtime dengan pengambilan jarak 40cm mendapatkan akurasi 100%, pada pengujian dengan jarak 80cm mendapatkan akurasi 66,67% dan sedangkan dengan pengujian dengan jarak 120cm mendapatkan akurasi 30%. Pergerakan robot dengan pengujian secara realtime dapat berjalan sempurna dan ketika diberi obstacle bola maka robot akan berhenti, ketika diberikan obstacle limas maka robot bergerak ke kanan dan bergerak ke kiri jika di depan ada obstacle kubus serta bergerak lurus ketika tidak mendeteksi adanya obstacle di depannya.
Kata Kunci: Raspberry Pi, Thresholding, Geometri Moments Invariant, Jaringan Syaraf Tiruan, Backpropagation.
ii
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
LEMBAR PENGESAHAN ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PERYATAAN ... iv HALAMAN PERSEMBAHAN ... v KATA PENGANTAR ... vi ABSTRACT ... viii ABSTRAK ... ix DAFTAR ISI ... x
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ... xv BAB I. PENDAHULUAN 1.1 Latar Belakang ... 1 1.2 Tujuan ... 2 1.3 Manfaat ... 2 1.4 Rumusan Masalah ... 3 1.5 Batasan Masalah ... 3 1.6 Metodologi Penelitian ... 4 1.7 Sistematika Penulisan ... 6
BAB II. TINJAUAN PUSTAKA 2.1 Objek Penelitian... 7 2.2 Kamera ... 7 2.3 Mobile Robot ... 8 2.3.1 Raspberry Pi... 9 2.3.2 Pyhton ... 12 2.3.3 Driver Motor IC L298N... 13 2.3.4 Motor DC ... 14
2.4 Pengolahan Citra (Image Processing) ... 14
2.4.2 Citra Warna ... 15 2.4.3 Gaussian Filter ... 16 2.4.4 Citra Binner ... 16 2.4.5 Histogram Citra ... 17 2.4.6 Ekualisasi Histogram ... 17 2.4.7 Segmentasi Citra...18 2.4.8 Ruang Warna HSV ... 19 2.4.9 Thresholding ... 20
2.5 Geo metri Moments ... 21
2.6 Jaringan Syaraf Tiruan ... 24
2.6.1 Propagasi Balik (backpropagation) ... 26
BAB III. METODOLOGI PENELITIAN 3.1 Pendahuluan ... 29
3.2 Kerangka Kerja ... 29
3.3 Perancangan Perangkat Keras... 30
3.3.1 Sensor Kamera (PiCamera) ... 31
3.3.2 Mikroprosesor ... 31
3.3.3 Voltage Regulator ... 31
3.3.4 Motor DC dan Driver Motor ... 31
3.4 Konsep Perancangan ... 32
3.4.1 Proses Penentuan Objek ... 33
3.4.2 Pengolahan Citra ... 33
3.4.2.1 Guassian Filter ... 34
3.4.2.2 Konversi Citra dengan HSV ... 34
3.4.2.3 Thresholding ... 36
3.4.3 Ekstrasi Fitur ... 36
3.4.3.1 Ekstraksi Geometri Moments Invariant ... 36
3.4.4 Backpropagation... 37
3.4.4.1 Arsitektur Backpropagation ... 38
3.4.4.2 Proses Pelatihan ... 39
iv
BAB IV. PENGUJIAN DAN ANALISA
4.1 Pendahuluan ... 41
4.2 Pengujian Perangkat Keras ... 41
4.2.1 Pengujian Kamera ... 41
4.3 Pengujian Perangkat Lunak ... 41
4.3.1 Tahapan Pengujian Preprocessing Image ... 42
4.3.2 Pengambilan Data ... 42
4.3.3 Pengujian Konversi Citra RGB ke Citra HSV ... 42
4.4 Tahapan Pengujian Sistem Ekstraksi Fitur ... 45
4.4.1 Perhitungan Invarian Momen ... 47
4.4.2 Tahpan Pengujian Ekstraksi Fitur ... 52
4.5 Pengujian Sistem Pelatihan Algoritma Backpropagation ... 56
4.5.1 Pengujian Terhadap Data yang sudah Dilatih ... 57
4.6 Pengujian Sistem Pengenalan Secara Realtime ... 60
4.6.1 Pengujian Pengenalan Secara Realtime ... 60
4.6.2 Pendeteksi Objek dengan Sistem Robot ... 67
BAB V. KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 70
5.2 Saran ... 70
DAFTAR GAMBAR
Halaman
Gambar 1.1 Diagram Metodelogi Penelitian ... 5
Gambar 2.1 Objek Tiga Dimensi ... 7
Gambar 2.2 Sensor Kamera (PiCamera) ... 8
Gambar 2.3 Raspberry Pi ... 10
Gambar 2.4 Pengaksesan GPIO dengan Phyton ... 11
Gambar 2.5 Data Sheet GPIO pin ... 11
Gambar 2.6 Tampilan IDLE ... 13
Gambar 2.7 Driver Motor L298N ... 13
Gambar 2.8 Motor DC ... 14
Gambar 2.9 Matriks Citra ... 15
Gambar 2.10 Citra Warna ... 16
Gambar 2.11 Tipe Citra Biner... 17
Gambar 2.12 Histogram Citra ... 17
Gambar 2.13 Hasil Ekualisasi Histogram ... 18
Gambar 2.14 Ruang Warna HSV ... 19
Gambar 2.15 Komputasi Sistem Pemodelan Neuron ... 24
Gambar 2.16 Arsitektur Jaringan Backpropagation Fungsi Aktivitas ... 26
Gambar 2.17 Sigmoid Biner pada Selang ... 27
Gambar 2.18 Sigmoid Biopolar Pada Selang ... 27
Gambar 3.1 Bagan Kerangka Kerja ... 30
Gambar 3.2 Diagram Blok Perancangan Mobile Robot ... 32
Gambar 3.3 Alur Proses Pengolahan Citra ... 33
vi
Gambar 3.5 Sistem Ekstraksi Geometri Momen Invarian ... 37
Gambar 3.6 Arsitektur Backpropagation ... 38
Gambar 3.7 Diagram Proses Pengenalan Backpropagation ... 39
Gambar 3.8 Diagram alur Proses Pengenalan ... 40
Gambar 4.1 Objek Kubus Citra RGB ... 42
Gambar 4.2 Objek Kubus ... 43
Gambar 4.3 Pixel Region Objek Kubus ... 45
Gambar 4.4 Nilai Pixel Region Objek Kubus ... 46
Gambar 4.5 Hasil Perhitungan Invarian Momen ... 52
Gambar 4.6 Tampilan Pelatihan Backpropagation ... 57
Gambar 4.7 Data Uji yang Pernah Dilatih ... 58
Gambar 4.8 Tampilan Hasil Pengenalan Data Latih yang Telah Dilatih... 58
Gambar 4.9 Perancangan Mobile Robot ... 67
Gambar 4.10 Mobile Robot Mendeteksi Obstacle Bola ... 67
Gambar 4.11 Pergerakan Mobile Robot saat Mendeteksi Obstacle... 68
Gambar 4.12 Pergerakan Mobile Robot dengan Obstacle Limas dan Kubus………68
Gambar 4.13 Pergerakan Mobile Robot dengan 2 Obstcle………..69
Gambar 4.14 Mobile Robot Saat Mendeteksi Objek Limas, Kubus dan Bola ... 69
DAFTAR TABEL
Halaman
Tabel 1 Threshold HSV pada Beberapa Sampel Pixel ... 46
Tabel 2 Nilai Momen Pada Objek Kubus ... 50
Tabel 3 Nilai Momen Pusat Pada Objek Kubus ... 50
Tabel 4 Hasil Perhitungan Invariant Moments Objek Kubus ... 52
Tabel 5 Pengujian Ektstraksi Fitur Invarian Momen ... 53
Tabel 6 Epoch, Learning Rate dan Error Rate ... 56
Tabel 7 Hasil Pengujian Data yang Pernah Dilatih ... 59
Tabel 8 Hasil Data Pengenalan dengan Jarak 40cm... 61
Tabel 9 Hasil Data Pengenalan dengan Jarak 80cm... 63
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Mobile robot adalah salah satu cabang yang paling penting pada penelitian robot, Mobile robot bisa dikatakan dinamis apabila dapat bergerak dengan bantuan seorang operator atau pergerakan autonomus yaitu pengendalian berdasarkan program kemudi pada robot [1]. Inovasi dilakukan para peneliti untuk membuat robot yang semakin sempurna dan mendekati kemampuan yang dimiliki oleh manusia, salah satunya kemampuan untuk melihat dan mengenali objek. Pada robot pengindraan untuk melihat secara jelas suatu objek yaitu dengan menggunakan kamera sebagai mata dari robot tersebut [2]. Kamera merupakan perangkat keras yang memiliki fungsi untuk menangkap objek untuk menjadikan sebuah gambar atau merekam suatu bayangan potret pada lembaran film [3]. Sistem pendeteksi objek pada robot beroda ini dapat di aplikasikan untuk menjangkau atau melihat pada situasi yang tidak dapat dijangkau oleh manusia atau tempat yang berbahya yang dapat mengancam keselamatan.
Sistem pendeteksi objek pada penelitian ini disusun oleh 2 komponen utama, yaitu sensor kamera dan mikroprosessor berbasis ARM sebagai otak dari robot [2]. Penelitian sebelumnya yang membahas mengenai kamera sebagai pendeteksi gerak menggunakan kamera webcam yang sekedar terkoneksi pada komputer menggunakan kabel untuk mengambil gambar.
Pengoptimalan untuk memfokuskan robot mendeskripsikan sebuah objek memiliki dua jenis deskripsi bentuk yaitu berdasarkan kontur dan keseluruhan [4]. Salah satu metode pendeskripsian bentuk adalah invariant moments yang diperkenalkan oleh Hu tahun 1962 [5]. Nilai yang dihasilkan dari invariant moments terdiri dari tujuh fitur nilai sebagai indifikasi ciri dari sebuah objek citra digital. Pada tahapan pengenalan objek menggunakan metode jaringan syaraf tiruan (JST) dengan menmanfaatkan objek yang telah terindentifikasi untuk proses pelatihan dan pengujian pengenalan objek. Terdapat beberapa metode yang dapat digunakan untuk proses pengenalan pada JST salah satunya yang digunakan pada penelitian ini adalah backpropagation [6].
Backpropagation merupakan sebagian model JST pada pencocokan pola yang menggunakan arsitektur multi layer serta pelatihan propagasi balik. Meskipun JST backpropagation memerlukan waktu lama untuk pelatihan tetapi bila pelatihan telah selesai dilakukan maka JST akan dengan mudah mengenali pola pada objek.
1.2. Tujuan
Adapun tujuan yang hendak dicapai dari dilakukannya penelitian ini adalah: 1. Merancang suatu sistem dengan media kamera sebagai sensor pendeteksi
objek menggunakan Ektraksi Fitur Geometri Momen Invarian dan JST backpropagation pada robot beroda.
2. Mengimplementasikan metode momen invarian dalam mengolah data yang diambil menggunakan kamera untuk mengindentifikasi ciri pada objek dan diproses melalui mikroprosesor berbasis ARM berupa data objek untuk masukan JST sebagai metode latih untuk mengenali objek. 3. Mengimplementasikan algoritma Jaringan Syaraf Tiruaan dengan metode
backpropagation pada sistem pengenalan pola dengan pembelajaran yang lebih sederhana dan waktu yang lebih singkat pada objek.
4. Mengimplementasikan gerak robot dengan mengikuti sesuai dengan pola objek.
1.3. Manfaat
Adapun manfaat yang dapat diambil dari dilakukannya penelitian ini adalah: 1. Dapatmendeteksi objek menggunakan kamera sebagai sensor pendeteksi
objek.
2. Dapat memproses data dari kamera menggunakan mikroprosesor berbasis ARM (raspberry).
3. Dapat menghasilkan program pembelajaran dan pengenalan pola pada objek menggunakan metode momen invariant untuk pencirian objek dan Jaringan Syaraf Tiruan untuk mengenali objek.
4. Robot dapat bergerak mengikuti pola objek dengan algoritma yang telah di buat.
3
1.4. Rumusan Masalah
Berdasarkan latar belakang masalah yang telah dikemukakan, permasalahan utama yang akan dibahas pada penelitian ini adalah bagaimana mengimplementasikan kamera sebagai sensor pendeteksi objek pada robot, menerapkan metode Fitur Geometri Moments Invariant untuk mengindentifikasi ciri pada objek hasil pengambilan gambar kamera dan menerapkan metode Jaringan Syaraf Tiruan (backpropagasi) sebagai metode pelatihan pada robot untuk mengenali pola pada objek menggunakan.
1.5. Batasan Masalah
Batasan masalah dalam tugas akhir ini yaitu sebagai berikut :
1. Robot dilengkapi dengan satu kamera untuk mendeteksi objek, dua buah roda motor DC yang ditempatkan pada bagian belakang kiri dan kanan , serta sebuah roda bebas yang berada di depan sebagai penyeimbang, dan dilengkapi dengan sistem minimum menggunakan Raspberry Pi 3 tipe B. 2. Menggunakan kamera PiCamera module V.2 dengan resolusi 8 mega pixel
dengan ukuran frame 300 x 300 pixel.
3. Keadaan lingkungan yang telah dikondisikan dalam ruangan (indoor) dan sesuai dengan pola yang telah dibuat.
4. Menggunakan 3 objek, objek yang digunakan berbentuk sebuah bola, kubus dan limas berwarna biru.
5. Pada proses pengambilan input (gambar) oleh kamera, pemprosesannya dilakukan di dalam raspberry dengan output yang dihasilkan ditampilkan pada monitor atau laptop dengan diremote.
6. Pergerakan robot mengikuti pola dari objek kubus, bola dan limas dengan algoritma pendeteksian kubus maka robot akan kekanan, jika mendeteksi limas maka robot bergerak ke kiri dan bila terdeteksi objek bola maka akan berjalan lurus.
7. Menggunakan metode momen invarian sebagai indentifikasi ciri objek dan Jaringan Syaraf Tiruan backpropagation sebagai sistem pelatihan pengenalan objek pada robot.
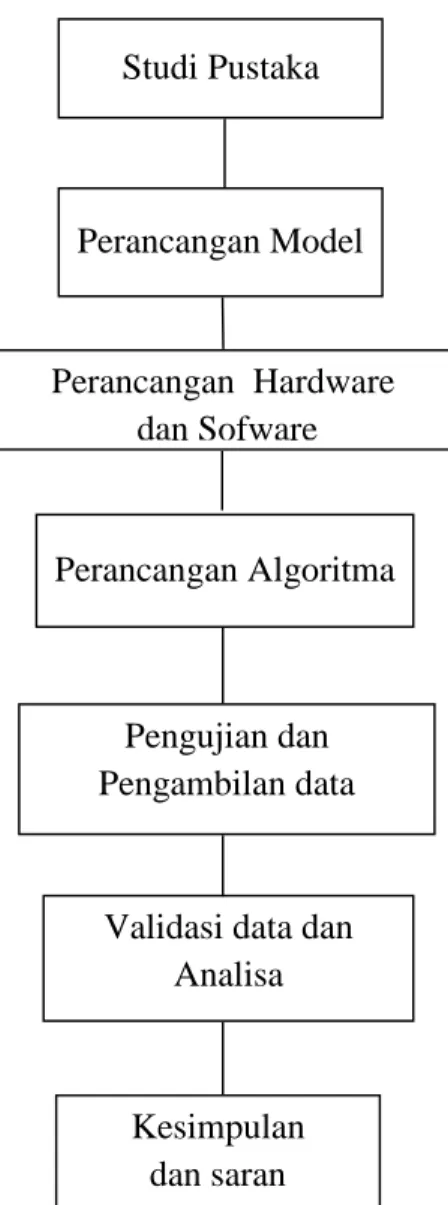
1.6. Metodologi Penelitian
Metode yang digunakan dalam Tugas akhir ini akan melewati beberapa tahapan sebagai berikut :
1. Studi Pustaka dan Literatur
Tahapan ini dilakukan dengan mencari dan membaca literature dan refrensi tentang “Pendeteksi Objek Pada Robot Bergerak Otonom dengan Metode Geometri Moments Invariant dan JST” baik yang menggunakan metode JST maupun metode lainya yang dapat menunjang penulisan laporan tugas akhir.
2. Pembutan Model dan Pemilihan Perangkat Keras
Tahapan ini dilakukan dengan cara membuat perancangan model dan menentukan peralatan yang sesuai untuk membuat dapat menunjang metode yang dipakai sehingga dapat menggunakan sensor kamera sebagai pengenal objek.
3. Perancangan Sistem Latih Robot
Pada tahapan ini dilakukan perancangan dan pembutan hardware robot untuk pengolahan data gambar yang di ambil oleh sensor kamera sebagai inputan, setelah itu menggunakan metode momen invarian sebagai pencirian objek untuk pengenalan objek dengan menggunakan metode JST sebagai metode latihnya.
4. Pengujian
Tahapan ini meliputi pengujian sistem pengenalan objek yang telah dirancang dengan menggunakan parameter pengujian sehingga diperoleh data hasil pengujian untuk mendapatkan fungsi optimal dari sistem yang telah dibuat.
5. Validasi dan Analisa
Hasil dari pengujian pengenalan objek, robot akan mendeteksi objek apakah sebagai objek latih atau bukan. Hal ini dilakukan dengan tujuan membuktikan bahwa metode yang diterapkan pada penelitian ini dapat berjalan sesuai dengan tujuan yang ingin dicapain. Selain itu tahap ini juga berfungsi untuk mengetahui kekurangan dan kelebihan pada hasil perancangan sistem selanjutnya.
5
6. Kesimpulan Setelah melakukan beberapa langkah, penelitian ini akan berakhir pada kesimpulan yang merupakan jawaban dari tujuan yang ingin dicapai pada bab 1 (Pendahuluan).
Metodologi yang akan digunakan melewati beberapa tahapan seperti pada gambar 1 :
Gambar 1.1 Diagram Metodelogi Penelitian Studi Pustaka Perancangan Model Perancangan Hardware dan Sofware Perancangan Algoritma Pengujian dan Pengambilan data
Validasi data dan Analisa
Kesimpulan dan saran
1.7. Sistematika Penulisan
Untuk lebih memudahkan dalam menyusun tugas akhir ini dan memperjelas isi dari setiap bab yang ada pada laporan ini maka dibuatlah sistematika penulisan sebagai berikut :
1. BAB I PENDAHULUAN
Bab ini berisi penjabaran secara sistematis topik yang diambil.
2. BAB II TINJAUAN PUSTAKA
Bab ini berisi dua hal penting, yaitu kerangka teori dan kerangka berfikir.
3. BAB III METODOLOGI
Bab ini menjelaskan secara bertahap dan terperinci tentang langkah – langkah (metodologi) yang digunakan untuk membuat kerangka berfikir dan kerangka kerja (framework) dalam menyelesaikan tugas akhir.
4. BAB IV PENGUJIAN DAN ANALISA
Bab ini menjelaskan tahapan pengujian dan analisa yang dilakukan pada tugas akhir ini, yang meliputi pengujian perangkat keras (Hardware), perangkat lunak (Software) dan pengujian keseluruhan sistem navigasi robot.
5. BAB V KESIMPULAN (SEMENTARA)
Bab ini berisi tentang kesimpulan penelitian tugas akhir yang masih bersifat sementara.
70
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Setelah dilakukan pengujian pada bab 4 dapat ditarik kesimpulan dengan menganalisa dari hasil pengujiannya sebagai berikut :
1. Metode segmentasi warna thresholding dapat diterapkan untuk memisahkan latar dan objek.
2. Ektraksi fitur momen invarian dapat mengindentifikasi objek kubus, bola dan limas dengan 7 fitur, selanjutkan akan menjadi masukan pada jaringan syaraf tiruan backpropagation sebagai metode pengenalan objek.
3. Pada penelitian ini epoch yang digunakan sebanyak 1300, hidden layer sebanyak 15 neuron dengan learning rate sebesar 0,5 dan error rate sebesar 0,01. Semakin besar error rate maka akan memakan waktu yang cukup lama pada saat pelatihan. Hasil pengujian data yang pernah dilatih menunjukan akurasi 100%.
4. Pada pengujian secara realtime robot dapat berjalan sempurna dan ketika diberi obstacle bola maka robot akan berhenti sesuai kontur pada data yang telah dilatih, ketika diberi obstacle limas maka robot akan bergerak ke kanan dan bergerak ke kiri jika di depan ada obstacle kubus.
5. Pengambilan data pada jarak 40cm, 80cm dan 120cm antara robot dengan objek didapatkan akurasi yang baik yaitu 100% pada jarak 40cm dikarenakan robot dapat mendeteksi nilai kontur pada objek, sedangkan apabila jaraknya terlampau jauh maka citra kontur tidak dapat dideteksi dikarekan banyak factor yang mempengaruhinya.
5.2. Saran
Disarankan untuk penelitian berikutnya agar dapat menambahkan servo yang terhubung pada sensor kamera, sehingga dapat melihat dari banyak sudut pandang. Menambahkan lagi jenis objek yang dipakai pada penelitian agar mendapatkan banyak variasi data.
71
[1] Anita, Syafidtri N. 2010. Robot Micromouse dengan Menggunakan Algoritma Depth-First Search. Jurusan Sistem Komputer, Fakultas Ilmu Komputer, Universitas Gunadarma.
[2] Rendy Dharta Nugraha. 2016. Rancang Bangun Mobile Robot Pengikut Objek Berdasarkan Warna dan Bentuk Menggunakan Template Matching Berbasis Mini PC. Fakultas Teknologi Informasi Universitas Andalas, Padang.
[3] Kuncoro Adi D, Lukas B. Setyawan, F. Dalu Setiaji. 2013. Aplikasi Webcam Untuk Menjejak Pergerakan Manusia Di Dalam Ruangan. Fakultas Teknik Elektronika dan Komputer Universitas Kristen Satya Wacana, Salatiga.
[4] Mercimek M, Gulez K and Mumcu TV. 2005. Real Object Recognition Using Moment Invariants. Sadhana Vol. 30, Part 6, Desember.
[5] Khotanzad A, Lu JH. 1990. Classification of Invarian Image Resprentations using a neural network. IEEE Transaction on Volume 38, Issue 6, june.
[6] Jang JSR, Sun CT, Mizutani E. 1997. Neuron Fuzzy and Soft Computing, A Computational Approach to Learning and Machine Intelligence, Internasional Edition, Prentice-Hall International Inc.
[7] Triwiyatno, Aris. 2011. Buku Ajar Sistem Kontrol Analog. Konsep Umum Sistem Kontrol.
[8] E, Prasetyo. 2011. Pengolahan Citra Digital dan Aplikasinya Menggunakan Matlab. Penerbit Andi. Yogyakarta.
72
[9] R. F. Gusa. 2013. Pengolahan Citra Digital untuk Menghitung Luas Daerah Bekas Penambangan Timah. Jurnal Nasional. Teknik Elektro Universitas Bangka Belitung. 2 September.
[10] R. Munir. 2006. Aplikasi Image thresholding untuk Segmentasi Objek. Seminar Nasional Aplikasi Teknologi Informasi. Institut Teknologi Bandung. Yogyakarta. 17 juni.
[11] Kadir, A, Susanto, A. 2013. Teori dan Aplikasi Pengolahan Citra. Penerbit Andi, Yogyakarta.
[12] Benedictus Putranto. 2010. Segmentasi Warna Citra dengan Deteksi Warna HSV untuk Mendeteksi Objek. Universitas Kristen Duta Wacana.
Yogyakarta.
[13] Wijaya, M. C. Prijono, A. 2007. Pengolahan Citra Digital Menggunakan Matlab. Penerbit Informatika, Bandung.
[14] Sabe N, Lew MS. 2000. Robust Computer Vision : Theory and Aplications. Leiden Institute of Advance Computer Science.
[15] Jatra, Muhammad. Isnanto, R. Rizal dan Santoso, Imam. 2011. Indentifikasi Iris Mata Menggunakan Metode Analisis Komponen Utama dan Perhitungan Jarak Euclidean. Tesis, jurusan Universitas Dipenegoro, Semarang.