ALAT UKUR SENSOR JARAK MEMANFAATKAN
SENSOR ULTRASONIK SRF-05 BERBASIS
MIKROKONTROLER PADA DINDING PARKIR
PROJEK AKHIR 2
YUNUS FIRDAUS KACARIBU
112411025
PROGRAM STUDI DIPLOMA 3 METROLOGI DAN INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
ALAT UKUR SENSOR JARAK MEMANFAATKAN SENSOR
ULTRASONIK SRF-05 BERBASIS MIKROKONTROLER PADA
DINDING PARKIR
PROJEK AKHIR 2
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
PROGRAM STUDI DIPLOMA 3 METROLOGI DAN INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Yang bertanda tangan di bawah ini, Dosen Pembimbing Tugas Akhir menyatakan bahwa laporan tugas akhir dari:
YUNUS FIRDAUS KACARIBU
112411025
Dengan judul:
ALAT UKUR SENSOR JARAK MEMANFAATKAN SENSOR
ULTRASONIK SRF-05 BERBASIS MIKROKONTROLER PADA
DINDING PARKIR
telah selesai diperiksa dan dinyatakan selesai, serta dapat diajukan dalam sidang pertanggungjawaban laporan tugas akhir.
Diluluskan di Medan, Juli 2014
Ketua Program Studi Dosen Pembimbing
D3 Metrologi dan Instrumentasi Projek Akhir 2
Drs. Diana A Barus M.Sc
PERNYATAAN
ALAT UKUR SENSOR JARAK MEMANFAATKAN SENSOR
ULTRASONIK SRF-05 BERBASIS MIKROKONTROLER PADA
PROJEK AKHIR 2
Saya mengakui bahwa projek akhir 2 ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2014
PENGHARGAAN
Segala puji dan syukur bagi Tuhan Yang Maha Esa yang telah melimpahkan berkah, rahmat-Nya dan menganugerahkan kemudahan serta kelancaran sehingga penulis dapat menyelesaikan penulisan tugas proyek ini sesuai waktu yang telah ditetapkan.
Projek akhir 2 ini disusun untuk melengkapi persyaratan dalam mencapai gelar Ahli Madya pada Program Studi Diploma 3 Metrologi dan Instrumentasi Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
Adapun judul Projek akhir 2 ini adalah
ALAT UKUR SENSOR JARAK MEMANFAATKAN SENSOR
ULTRASONIK SRF-05 BERBASIS MIKROKONTROLER PADA
Penulis menyadari bahwa tersusunnya Laporan Projek Akhir ini dari Do’a, perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Kedua Orang Tua penulis serta saudara kandung yang telah memberikan bantuan moril maupun materil, semangat dan do’a yang begitu besar kepada penulis.
2. Ibu Dr. Diana Alemin Barus MS.c selaku Ketua Program Studi D3 Metrologi dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam sekaligus pembimbing yang telah banyak membantu dan mendukung penulis dalam menyelesaikan laporan Akhir ini.
4. Seluruh Dosen dan Karyawan Program Studi Diploma Tiga (III) Metrologi dan Instrumentasi Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
5. Teman - teman yang telah bekerja bersama merancang alat hingga penulis dapat menyelesaikan penulisan laporan projek akhir ini
Penulis menyadari sepenuhnya bahwa dalam pembuatan projek Akhir 2 ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat ny membangun dalam penyempurnaan Tugas Proyek ini.
Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Medan, Juli 2014 Hormat Kami,
ABSTRAK
DAFTAR ISI
3.2 Perancangan Rangkaian Catu Daya 10
3.3 Rangkaian Sensor Ultrasonic 10
3.4 Perancangan Rangkaian Mikrokontroller AVR Atmega 328 12
3.5 Peta Memory LCD character 2x16 13
3.6 Rangkaian Buzzer dan led 14
BAB IV Pengujian Rangkaian dan Analisa Program 15 4.1 Pengujian Rangkaian Power Supply 17
4.2 Pengujian Rangkaian Mikrokontroler 18
4.3 Pengujian dan Analisa Rangkaian 18
4.4 Pengujian Interfacing 19
Gambar 2.2 Ilustrasi Cara Kerja Sensor Ultrasonik 5 Gambar 2.3 Pulsa Sensor Ultrasonik MODE 1 SRF05 7 Gambar 2.4 Pulsa Sensor Ultrasonik MODE 2 SRF05 7
Gambar 3.1 Diagram Blok Sistem 9
Gambar 3.2 Rangkaian Catu Daya 10
Gambar 3.3 Rangkaian Receiver Ultrasonic 11
Gambar 3.4 Jarak Antara Tx-Rx 11
Gambar 3.5 Keluaran Pulsa Ultrasonic 12
Gambar 3.6 Skematik Arduino Board 12
Gambar 3.7 LCD Character 13
Gambar 3.8 Peta Memory LCD 13
Gambar 3.9 Flowchart Sistem 15
ABSTRAK
BAB I
PENDAHULUAN
1.1. Latar belakang
Perkembangan dan kemajuan teknologi yang demikian pesat saat ini, maka telah banyak diciptakannya alat bantu untuk mempermudah dan mempercepat pekerjaan manusia. Alat bantu ini menggunakan sistem instrumentasi yang banyak di gunakan di tempat-tempat umum khususnya di tempat parkir.
Dimana biasanya pengukuran level jarak dilihat dari kapasitas suatu benda kebenda lain yang bisa diterima oleh kapasitas maksimum jarak itu sendiri dengan menggunakan jarak dari satu titik ke titik lain menggunakan mistar, meteran dan lain sebagainya yang pembacaannya dipengaruhi oleh error pembaca, dan tingkat ketelitian dari alat ukur tersebut. Dimana pembacaan akan berubah ketika yang mengukur juga berbeda.Masalah ini dapat di atasi dengan membuat alat sistem digital sehingga dengan demikian pada saat melakukan pengukuran, hasil ukur akan tampil pada LCD. Sehingga pengukur dapat mengetahui hasil pembacaan jarak dari suatu objek yang ada didepannya.
1.2 Rumusan Masalah
Laporan proyek ini membahas tentang perancangan yang terdiri sensor ultrasonic, Mikrokontroler Arduino UNO sebagai pusat kendalinya beserta pemrogramannnya, LCD sebagai tampilannya, dan Baterai sebagai Sumber Arus nya.
1.3. Tujuan Penulisan
Penulisan laporan proyek ini adalah untuk:
1. Membuat suatu alat,alat ukur sebagai pemandu untuk supir 2. Membuat/menerapkan suatu aplikasi selama diperkuliahan.
3. Sebagai salah satu syarat untuk dapat menyelesaikan program Diploma Tiga (D-III) Metrologi dan Instrumentasi FMIPA Universitas Sumatera Utara.
yaitu dengan menggunakan sensor ultrasonic SRF05 berbasis Arduino UNO
5. Penulis ingin memberikan penjelasan tentang penggunaan dan cara kerja alat ukur jarak/panjang menggunakan sensor ultrasonic SRF05 yang Berbasis mikrokontroler Arduino UNO
1.4. Batasan Masalah
Mengacu pada hal diatas Penulis Merancang alat ukur jarak/panjang untuk mencari jarak dari suatu titik terhadap objek yang ada di depannya mengunakan sensor ultrasonic SRF05 Berbasis MikrokontrolerArduino UNO, dengan batasan-batasan sebagai berikut :
1. Pembahasan Sensor ultrasonic YH-SRF05 sebagai sensor jarak/panjang untuk mencari jarak dari suatu titik terhadap objek yang ada di depannya
2. Pembahasan hanya meliputi rangkaian Sensor karena yang di tonjolkan adalah sifat Sensor dalam rangkaian.
3. Pembahasan hanya sebatas pemrograman mikrokontroler.
1.5. Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman, penulis membuat sistematika penulisan bagaimana sebenarnya prinsip kerja dari pengukuran alat ukur jarak dengan sensor ultrasonic berbasis mikrokontroler Arduino UNO untuk mendapatkan jarak dari suatu titik terhadap objek yang ada di depannya, maka penulis menulis laporan Projek akhir ini dengan urutan sebagai berikut :
BAB I : PENDAHULUAN
Berisi latar belakang permasalahan, batasan masalah, tujuan pembahasan, metodologi pembahasan, sistematika penulisan dan relevansi dari penulisan laporan projek akhir 1 ini.
BAB II : LANDASAN TEORI
BAB III : PERANCANGAN SISTEM
Membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV : PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain.
BAB V : KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
Landasan teori sangat membantu untuk dapat memahami suatu sistem.Selain dari pada itu dapat juga dijadikan sebagai bahan acuan didalam merencanakan suatu system.Dengan pertimbangan hal-hal tersebut, maka landasan teori merupakan bagian yang harus dipahami untuk pembahasan selanjutnya.Pengetahuan yang mendukung perencanaan dan realisasi alat meliputi sensor ultrasonik YH-SRF05, mikrokontroler Arduino UNO dan program.
2.1. Sensor Ultasonic YH-SRF05
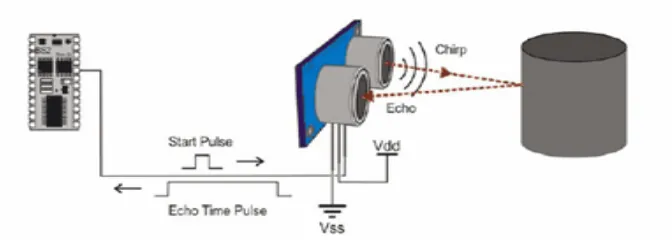
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang dimana sensor menghasilkan gelombang pantulan ke benda yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar perhitungannya.. Perbedaan waktu antara gelombang pantulan yang di kembalikan dan yang diterima kembali adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya. Jenis objek yang dapat di indranya adalah padat, cair dan butiran. Tanpa kontak jarak 3 cm sampai 4 meter dan dapat dengan mudah dihubungkan dengan mikrokontroler malalui satu pin I/O saja.Dimensi : 2,6 cm (p) x 4,1 cm (l) x 6,2 cm (t)
Gambar 2.1 Sensor Ultrasonik
2.1.1 Spesifikasi Dari Sensor Ultrasonik
Adapun spesifikasi dari sensor ultrasonik Devantech srf05 dengan spesifikasi sebagai berikut antara lain :
2. 8 modul dapat digunakan bersama dalam satu sistem I2C-bus yang hanya membutuhkan 2 pin I/O mikrokontroler saja.
3. Membutuhkan catu daya tunggal +5 VDC, dengan konsumsi arus 17 mA typ. (tanpa sensor infrared ranger).
4. Bekerja pada tegangan DC 5 volt 5. Beban arus sebesar 30 mA – 50 mA
6. Menghasilkan gelombang dengan frekuensi 40 KHz 7. Jangkauan jarak yang dapat dideteksi 3 cm – 400 cm 8. Membutuhkan trigger input minimal sebesar 10 uS
9. Dapat digunakan dalam dua pilihan mode yaitu input trigger dan output echo terpasang pada pin yang berbeda atau input trgger dan output echo terpasang dalam satu pin yang sama.
2.1.2 Cara Kerja Sensor Ultrasonik
Cara kerja sensor ultrasonik dengan cara memantulkan gelombang ke sebuah objek kemudian data yang di pantulkan menentukan jarak dari sensor ke objek.
Gambar 2.2 Ilustrasi cara kerja sensor ultrasonik
2.1.3 Prinsip Kerja Sensor Ultrasonik
Prinsip kerja dari sensor ultrasonik adalah sebagai berikut :
2. Mikrokontroler memberikan pulsa trigger (pulsa high dengan tOUT selama 2 µs sampai 5 µs).
3. Kemudian setelah memberikan trigger, pin tersebut dijadikan input.
4. Sensor memancarkan gelombang ultrasonic sebesar 40KHz selama 200 µs (tBURST).
5. Gelombang ultrasonic ini akan merambat diudara dengan kecepatan 344.424 m/detik atau 1 cm setiap 29.034 µs.
6. Gelombang tersebut akan mengenai objek kemudian terpantul kembali ke sensor. 7. Selama menunggu pantulan, sensor akan menghasilkan sebuah pulsa (high)
8. Pulsa ini akan berhenti (low) ketika gelombang suara pantulan terdeteksi oleh sensor. 9. Lebar pulsa tersebutlah yang yang dipresentasikan sebagai jarak antara sensor ping
dengan objek.
10.Lebar pulsa high (tIN) akan sesuai dengan lama waktu tempuh gelombang ultrasonik untuk 2x jarak ukur dengan obyek yang kemudian dapat merepresentasikan jarak antara sensor ping dengan objek.
11.Sinyal yang diterima oleh rangkaian receiver dikirimkan ke rangkaian mikrokontroler untuk selanjutnya diolah untuk menghitung jarak terhadap benda.
12.Benda di sini adalah benda yang bersifat memantul, bukan benda yang bersifat meredam sinyal.
Untuk menghitung jarak yang terukur dari waktu terima sensor dapat menggunakan persamaan berikut ini.
Di mana:
V = adalah kecepatan suara 344 m/s
t = adalah waktu tempuh (s)
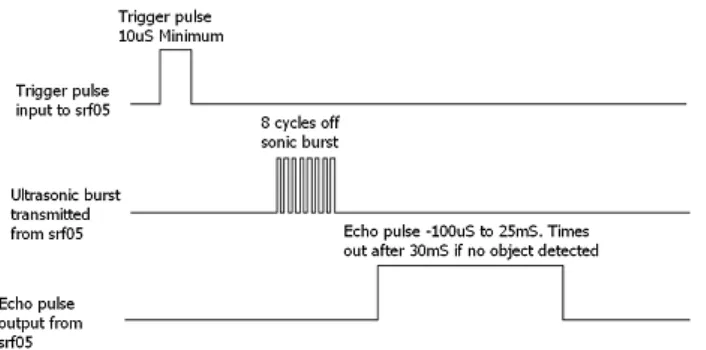
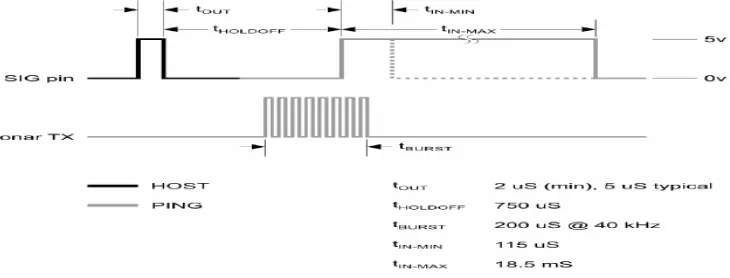
2.1.4 Spesifikasi Antar muka L ebar Pulsa
Mode 1- SRF05 - Trigger dan Echo terpisah
Pada mode ini, untuk mengakses input dan output digunakan pin sensor utrasonik yang berbeda. Artinya satu pin akan berfungsi sebagai transmitter dan satu pin sisanya berfungsi sebagai receiver. Jadi antara Triger dan Echo di bedakan.
Gambar 2.3 Pulsa sensor Ultrasonik MODE 1 SRF05
Mode 2- SRF05 - Trigger dan echo dalam 1 pin
Pada mode ini menggunakan 1 pin untuk digunakan sebagai trigger dan echo. Untuk menggunakan mode ini, hubungkan pin mode pada 0V / ground. Sinyal echo dan sinyal trigger di dapat dari 1 pin saja dengan delay antara sinyal trigger dan sinyal echo kurang lebih 700 usM
Gambar 2.4 Pulsa sensor Ultrasonik MODE 2 SRF05
2.2. Mikrokontroler Arduino UNO
BAB III
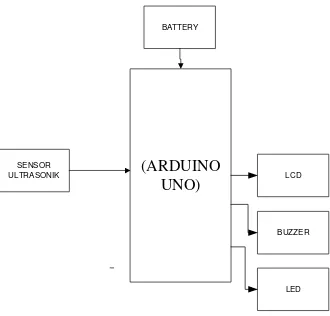
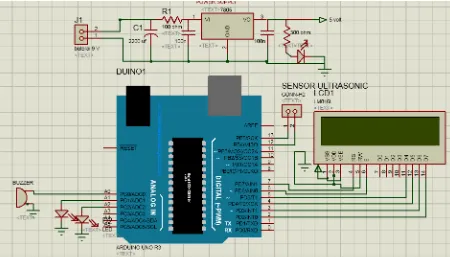
Berikut ini adalah diagram blok dari rangkaian yang dibuat:
Gambar 3.1. Diagram Blok Rangkaian
a. Baterai berfungsi sebagai sumber tegangan dari seluruh sistem agar sistem dapat bekerja.
b. AVR ATmega328 merupakan pusat kendali dari seluruh rangkaian. Dimana mikrokontroller akan mengecek sinyal yang dikirimkan oleh sensor
c. Sensor ultrasonic HC-Sr04 akan mengindera keberadaan halangan depan d. LCD berfungsi sebagai indikator keluaran.
(ARDUINO
UNO)
SENSOR
ULTRASONIK LCD
BATTERY
BUZZER
3.2 Perancangan Rangkaian Catu Daya
Rangkaian ini berfungsi untuk mensupplay tegangan ke seluruh rangkaian yang ada. Rangkaian Catu daya (Power Supply Adaptor) ini terdiri dari satu keluaran, yaitu 5 volt. Keluaran 5 volt digunakan untuk mensupplay tegangan ke rangkaian mikrokontroller AVR Atmega8535, sensor ultrasonik, buzzer dan LCD. Rangkaian catu daya ditunjukkan pada gambar 3.2 berikut ini :
Gambar 3.2 Rangkaian Catu Daya
Baterai merupakan sumber tegangan DC, selanjutnya akan diratakan oleh kapasitor 220 µF.
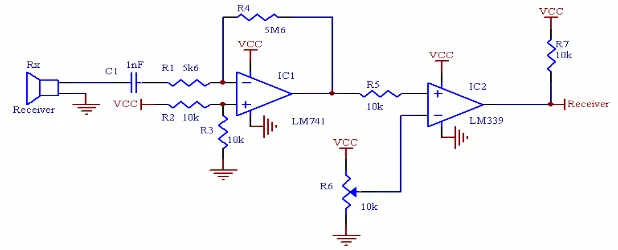
3.3 Rangkaian Sensor Ultrasonic
Di dalam blok sensor ultrasonic ada 2 rangkaian yang saling berhubungan yaitu Transmitter sebagai pengirim data dari objek ke benda dan Receiver sebagai penerima data dari benda ke objek seperti terlihat pada gambar 3.3. sebagai berikut :
Jarak antara ultrasonic tranducer Rx dan Tx mempengaruhi kinerja alat dalam aplikasi ini. Pengaturan resistor variabel R6 pada rangkaian receiver dapat dilakukan saat rangkaian dinyalakan yaitu dengan acuan tampilan LCD. Bila LCD selalu menampilkan “Distance = 001 cm.
Gambar 3.4. Jarak antara Tx – Rx
Rangkaian ultrasonic transducer terbagi 2 yaitu rangkaian receiver dan rangkaian transmitter, skematik rangkaian terdapat Gambar 3.3. Pada Gambar 3.3. resistor variabel R6 berfungsi untuk mengatur jendela komparator yang akan berpengaruh pada sensitivitas receiver dan juga mempengaruhi daya ukur alat ini secara keseluruhan.
Jika gelombang ultrasonik merambat dalam suatu medium, maka partikel Medium mengalami perpindahan energi. Besarnya energi gelombang ultrasonik yang dimiliki partikel medium. Maka kita perhatikan pulsa di bawah ini adalah keluaran gelombang ultrasonic :
Gambar 3.5. Keluaran Pulsa Ultrasonic
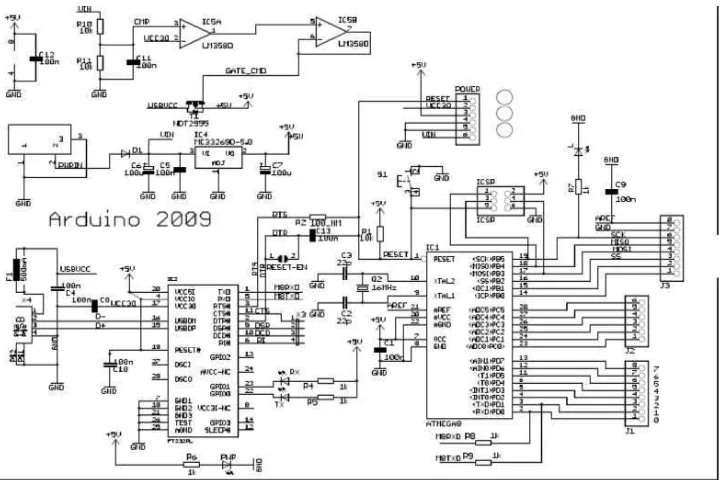
3.4. Perancangan Rangkaian Mikrokontroller AVR Atmega328/Arduino uno
dengan jangkauan jarak yang sudah ditentukan. Arduino menyimpan seluruh data input pada memory EEPROM, tujuannya adalah ketika arduino kehilangan power maka seluruh inputan tidak hilang sehingga arduino dapat menampilkan inputan yang telah disimpan. Berikut ini adalah skematik arduino uno :
Gambar 3.4. Skematik Arduino Board
Arduino memiliki beberapa pin yang berfungsi sebagai penghubung antar modul yang digunakan pada sistem ini, berikut adalah konfigurasi pin arduino yang digunakan sebagai koneksi antar modul :
• Pin power Vin 5 Volt
Pin power ini digunakan untuk menghubungkan power arduino kepada sensor ultrasonic. Sensor ultrasonic dihubungkan dengan pin power 5 V karena memerlukan
tegangan sebesar 5V. Apabila tegangan yang masuk lebih besar dari 5V maka sensor akan rusak dan jika kurang dari 5V maka data yang diberikan oleh arduino akan kacau.
• Pin Ground
jalur ground sensor ping
• Pin 7
Pin 7 pada arduino berfungsi untuk menghubungkan jalur data antara sensor ping dengan input arduino.
3.4. Display LCD Character 2x16
Display LCD 2x16 berfungsi sebagai penampil nilai volume tabung yang terukur oleh alat. LCD yang digunakan pada alat ini mempunyai lebar display 2 baris 16 kolom atau biasa disebut sebagai LCD Character 2x16, dengan 16 pin konektor, yang didifinisikan sebagai berikut:
Gambar 3.4 LCD Character 2x16
Modul LCD terdiri dari sejumlah memory yang digunakan untuk display. Semua teks yang kita tuliskan ke modul LCD akan disimpan didalam memory ini, dan modul LCD secara berturutan membaca memory ini untuk menampilkan teks ke modul LCD itu sendiri.
Gambar 3.5 Peta Memory LCD character 2x16
Agar dapat menampilkan karakter pada display maka posisi kursor harus terlebih dahulu diset. Instruksi Set Posisi Kursor adalah 80h dengan demikian untuk menampilkan karakter, nilai yang terdapat pada memory harus ditambahkan dengan 80h.
Sebagai contoh, jika kita ingin menampilkan huruf “A” pada baris kedua pada posisi kolom ke sepuluh, maka sesuai dengan peta memory, posisi karakter pada kolom 10 dari baris kedua mempunyai alamat 4Ah, sehingga sebelum kita menampilkan huruf “A” pada LCD, kita harus mengirim instruksi set posisi kursor, dan perintah untuk instruksi ini adalah 80h ditambah dengan alamat 80h + 4Ah = 0Cah. Sehingga dengan mengirim perintah 0Cah ke LCD, akan menempatkan kursor pada baris kedua dan kolom ke-10
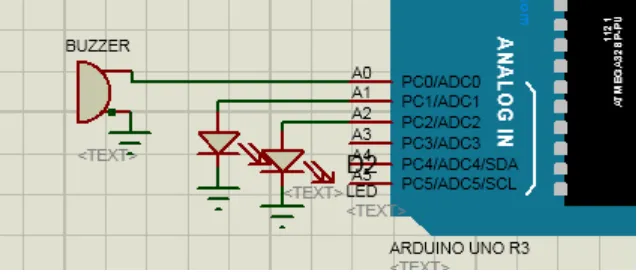
3.6. Rangkaian buzzer dan led
Buzzer dan led menggunakan tegangan 5 volt. Buzzer dan led diletak didekat dengan rangkaian. Buzzer dan led berfungsi sebagai indikator bahwa sensor ultrasonik mendeteksi benda dengan jarak yang cukup dekat, maka mikro akan memberikan logika high pada port keluaran buzzer dan led
3.7. Flowchart sistem
Flowchart pada sistem rangkaian alat adalah sebagai berikut:
BAB IV
PENGUJIAN ALAT DAN ANALISA RANGKAIAN
4.1. Pengujian Rangkaian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak jika diukur,
4.2. Pengujian Rangkaian Mikrokontroler ATMega8535
Pengujian pada rangkaian mikrokontroler ATMega8535 ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power supply sebagai sumber tegangan. Kaki 40 dihubungkan dengan sumber tegangan 5 volt, sedangkan kaki 20 dihubungkan dengan ground. Kemudian tegangan pada kaki 40 diukur dengan menggunakan Voltmeter. Dari hasil pengujian didapatkan tegangan pada kaki 40 sebesar 4,9 volt. Langkah selanjutnya adalah memberikan program sederhana pada mikrokontroler ATMega 8535, program yang diberikan adalah sebagai berikut:
4.1 Pengujian dan Analisa Rangkaian Sensor Ultrasonic
Pada gambar 3.2. dan 3.3. tentang rangkaian transmitter dan receiver terletak dalam 1 komponen melainkan masing- masing mempunyai fungsi. untuk menganalisa rangkaian ultrasonic dapat di lihat pada pembahasan di bawah ini.
Tabel 4.1. Data Jarak deteksi halangan
Jarak
Pengujian jarak pendeteksian sensor ultrasonik dilakukan dengan mendekatkan dan menjauhkan posisi objek yang ada didepan sensor, dengan kondisi objek merupakan benda padat yang tidak menyerap atau terbuat dari bahan yang lunak. Untuk mengetahui kepekaan sensor ketika diberikan objek yang berbeda dilakukan sebanyak 5 kali pada masing-masing objek.
Pulsa selebar 10 µs menyatakan jarak 1 mm. Jadi misalkan lebar pulsa yang dikirim sdalah 10 ms, maka hasil pengukuran adalah 100 cm.
Cara kerja sensor :
Dapat di simpulkan bahwa cara kerja sensor ini ketika di beri penghalang/ benda yang menghalangi sensor maka akan menimbulkan tegangan sebesar pantulan yang di berikan setelah data di dapat berbentuk pulsa selanjutnya di baca oleh mikrokontroller guna di konversi ke kode ASCII kemudian ditampilkan di LCD
4.3. pengujian Interfacing LCD 2x16
Bagian ini hanya terdiri dari sebuah LCD dot matriks 2 x 16 karakter yang berfungsi sebagai tampilan hasil pengukuran dan tampilan dari beberapa keterangan. LCD dihubungkan langsung ke Port dari mikrokontroler yang berfungsi mengirimkan data hasil pengolahan untuk ditampilkan dalam bentuk alfabet dan numerik pada LCD.
Display karakter pada LCD diatur oleh pin EN, RS dan RW: Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa anda sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set ( high ) pada dua jalur kontrol yang lain RS dan RW. Jalur RW adalah jalur kontrol Read/ Write. Ketika RW berlogika low (0), maka informasi pada bus data akan dituliskan pada layar LCD. Ketika RW berlogika high ”1”, maka program akan melakukan pembacaan memori dari LCD. Sedangkan pada aplikasi umum pin RW selalu diberi logika low ( 0 )
Berdasarkan keterangan di atas maka kita sudah dapat membuat progam untuk menampilkan karaker pada display LCD. Adapun program yang diisikan ke mikrokontroller untuk menampilkan karakter pada display LCD adalah sebagai berikut:
#include <mega8535.h>
// Alphanumeric LCD Module functions
#include <alcd.h>
void main(void)
{
PORTA=0x00;
lcd_putsf("System ultrasonic"); delay_ms(500);
} }
Program ini telah berjalan dengan baik dan sesuai dengan kebutuhan pada perancangan. Program di atas akan menampilkan kata ”system ultrasonic” di baris pertama pada display LCD 2x16.
4.4 Pengujian buzzer
Buzzer yang digunakan adalah buzzer aktif high 5 v, saat sensor ultrasonik mendeteksi kondisi jarak lebih kecil dari jarak referensi, maka buzzer akan berbunyi, untuk memperingatkan pemakai tongkat. Buzzer dapat langsung dihubungkan ke pin output mikrokontroller tanpa perlu ditambahkan rangkaian penguat lagi
Gambar 4.5 Buzzer aktif high
untuk menguji apakah PORT pada mikrokontroller dapat menghidupkan buzzer, maka diberi program yang memberikan output pada PORTB.3 logika high, programnya adalah sebagai berikut:
#include <mega8535.h> #include <delay.h> #include <stdio.h> void main(void) {
while (1)
PORTB=0x00; DDRB=0xFF; {
PORTB.3=1; Delay_ms(1000); PORTB.3=0; Delay_ms(1000); }
}
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Setelah dilakukan pengujian hasil pembacaan jarak untuk mengetahui level dari ketinggian cairan dengan sensor ultrasonik YH-SRF05 berbasis Arduino UNO, dapat diambil beberapa kesimpulan:
1. Alat ukur jarak ini dikemas secara portable sehingga mudah dibawa dan digunakan. 2. Tampilan hasil jarak mengalami penunjukkan yang kurang konstan disebabkan
gelombang pantulan ultrasonik mengalami gangguan seperti interfensi dari gelombang lain atau mendapat pantulan dari benda lain dan menyebabkan hasil pengukuran tidak akurat.
3. Sensor ultrasonik YH-SRF05dapat mengukur jarak mulai dari 3 cm- 400 cm
4. Dengan sensor ultrasonik YH-SRF05 bebasis Arduino Uno mengukur jarak dari suatu titik terhadap objek yang ada di depan nya lebih otomatis dan lebih akurat
4. Semakin jauh jarak objek yang akan dibaca maka semakin banyak persen kesalahannya.
5. Sensor YH-SRF05 dan LCD merupakan barang yang sensitif maka ketika membawanya harus berhati-hati.
5.2. Saran
Beberapa tambahan yang diperlukan dalam meningkatkan kemampuan alat ini adalah: 1. Diperlukannya pin kalibrasi untuk memulai pengukuran dari nol.
Daftar Pustaka
Bejo,Agus. 2005. C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroler ATMega8535 . Edisi Pertama. Yogyakarta: Penerbit Gava Media.