1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Menternakkan ikan di dalam kolam harus diperhatikan waktu pemberian pakannya, sehingga ikan tersebut membutuhkan makanan yang teratur dan terus menerus. Ternak ikan adalah suatu hobi masyarakat yang sangat digemari dari dulu sampai saat ini, karena kemudahan dalam perawatannya. Sehingga membuat semua orang ingin menernakkan ikan tersebut apalagi menjadikan ikan tersebut sebagai peluang untuk bisnis.
Hanya saja ada kesulitan ketika seseorang harus bepergian hingga dapat memakan waktu yang sangat lama, pasti akan berpikir bagaimana ikan ternaknya. Lalu, bagaimana agar memberi pakan ikan-ikan tersebut dengan terjadwal secara terus menerus tanpa harus mengganggu aktivitas peternak sehari-hari. [1]
Dalam dunia modern ini, perkembangan teknologi telah memungkinkan kepada kehidupan manusia untuk melakukan suatu hal yang bersifat otomatis. Karena adanya otomatisasi, maka akan menggeser penggunaan manual kearah otomatis.
Berdasarkan latar belakang diatas, maka penulis memberikan solusi dengan merancang alat untuk tugas akhir ini dengan judul “SISTEM PENGONTROLAN PAKAN IKAN OTOMATIS DI KOLAM BERBASIS MIKROKONTROLER ATMEGA16”
1.2 Maksud dan Tujuan
Adapun maksud dalam penulisan tugas akhir ini adalah mengembangkan sebuah sistem yang digunakan untuk mengontrol pemberian pakan ikan otomatis yang sudah ditentukan sehingga ikan yang dipelihara akan teratur dalam pemberian pakannya.
2 1.3 Batasan Masalah
Dalam perancangan sistem yang akan dibuat, terdapat beberapa batasan masalah, yaitu:
1. Pengaturan dalam pemberian pakan ikan hanya dikolam 2. Pengaturan untuk membuka dan menutup pakan ikan.
1.4 Metode Pelaksanaan
Adapun metode pelaksanaan yang digunakan dalam pembuatan tugas akhir ini adalah:
1. Studi literatur
Merupakan suatu metode pengumpulan informasi dengan cara mencari referensi dari buku, Internet dan bebagai komponen pendukung yang akan dipakai dalam perancangan Tugas Akhir ini serta mempelajari bahasa pemograman yang akan digunkan.
2. Observasi lapangan
Pada penelitian ini, Penulis telah melakukan beberapa survei di lapangan antara lain dengan cara mencari dan mengumpulkan bahan-bahan dan komponen yang dibutuhkan dalam pembuatan sistem ini.
3. Perancangan dan implementasi
Mengintegrasikan antara perangkat keras dengan perangkat lunak sehingga tersusun sebuah sistem yang dapat melakukan monitoring.
4. Pengujian
Menguji sistem yang dibuat, kemudian mengambil dan menganalisa data dari sistem tersebut. Tahapan ini bertujuan untuk mengetahui apakah sistem ini dapat bekerja dengan baik. Data yang diperoleh selama tahapan ini dapat menggambarkan proggress dari penelitian yang dilakukan.
1.5 Sistematika Penulisan
3 BAB I PENDAHULUAN
Bab ini menjelaskan tentang latar belakang, rumusan masalah, maksud dan tujuan, batasan masalah, metode pelaksanaan, serta sistematika penulisan.
BAB II LANDASAN TEORI
Bab ini akan menjelaskan tentang landasan teori yang berhubungan dengan hardware dan software yang akan dibuat.
BAB III PERANCANGAN SISTEM
Bab ini menjelaskan tentang perancangan hardware, mulai dari tujuan, komponen yang digunakan, perancangan desain hardware, pembuatan program, dan cara menggunakan atau menjalankan hardware.
BAB IV PENGUJIAN DAN ANALISA
Bab ini berisi bahasan tentang hasil dan pembahasan hasil pengujian yang terdapat pada perumusan masalah serta prinsip kerja dari alat tersebut.
BAB V KESIMPULAN DAN SARAN
Bab ini berisikan kesimpulan dari hasil pembahasan serta saran yang diberikan penulis kepada mahasiswa yang akan mengembangkan tugas akhir ini. DAFTAR PUSTAKA
Berisi sumber-sumber yang dirujuk dalam penulisan atau dalam menyusun tugas akhir ini.
4
BAB II
TEORI PENUNJANG
2.1 Pengertian Pemberian Pakan Pada Ikan
Ketersediaan pakan dalam jumlah yang cukup, tepat waktu dan bernilai gizi baik merupakan salah satu faktor yang sangat penting dalam kegiatan usaha budi daya ikan. Penyediaan pakan yang tidak sesuai dengan jumlah ikan yang dipelihara menyebabkan laju pertumbuhan ikan menjadi lambat. Akibatnya produksi yang dihasilkan tidak sesuai dengan yang diharapkan.
Pada dasarnya, sumber pakan bagi ikan pemeliharaan berasal dari pakan alami dan pakan buatan. Oleh karena jumlah pakan alami dalam kolam atau perairan sangat terbatas dan kurang memadai maka agar tercapai laju pertumbuhan ikan yang baik perlu di berikan pakan tambahan atau pakan buatan sesuai dengan kebutuhan ikan. Apabila laju pertumbuhan ikan baik, maka waktu pemeliharaan menjadi lebih singkat sehingga produktivitas kolam atau perairan juga meningkat, karena periode produksi ikan yang dipelihara menjadi lebih pendek. [2]
2.2 Perangkat Keras (Hardware)
Berikut ini teori perangkat keras dan perangkat lunak yang digunakan, meliputi driver motor, mikrokontroler, sensor infrared, dan RTC DS1307.
2.2.1 Mikrokontroler
Mikrokontroler merupakan suatu terobosan teknologi mikroprosesor dan mikrokomputer yang merupakan teknologi semikonduktor dengan kandungan transistor yang lebih banyak namun hanya membutuhkan ruang yang sangat kecil. Mikrokontroler merupakan sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dengan PC (Personal Computer) yang memiliki beragam fungsi.
5
tertentu saja, perbedaan lainnya terletak pada perbandingan RAM (Random Access Memory) dan ROM (Read Only Memory) dimana program-program pengguna disimpan dalam ruang RAM (Random Access Memory) yang relatif besar, sedangkan prosedur antarmuka perangkat keras disimpan dalam ruang ROM (Read Only Memory) yang kecil. Sedangkan pada perbandingan mikrokontroler ROM (Read Only Memory) dan RAM (Random Access Memory) yang besar, artinya program kontrol disimpan dalam ROM (Read Only Memory) pada bias Masked ROM (Read Only Memory) atau Flash PEROM yang ukurannya relatif lebih besar, sedangkan RAM (Random Access Memory) digunakan sebagai tempat penyimpanan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
Mikrokontroler ATMega16 merupakan suatu sistem komputer yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering juga disebut dengan single chip mikrokomputer. Mikrokontroler biasa dikelompokkan dalam satu keluarga, masing-masing mikrokontroler mempunyai spesifikasi tersendiri namun masih kompatibel dalam pemrogramannya.
Didalam pembuatan Tugas Akhir ini penulis memilih mikrokontroler AVR ATMega 16 sebagai prosessor dari alat yang akan dibuat. AVR merupakan seri mikrokontroler CMOS 8 bit buatan Atmel, berbasis arsitektur RISC (Reduced Instruction Set Computer). Atmel merupakan salah satu vendor yang bergerak dibidang mikroelektronika, telah mengembangkan AVR (Alf and Vegard’s Risc processor) sekitar tahun 1997. Berbeda dengan mikrokontroler MCS51, AVR menggunakan arsitektur RISC (Reduce Instruction Set Computer) yang mempunyai lebar bis data 8 bit, perbedaan ini bisa dilihat dari frekuensi kerjanya. MCS51 memiliki frekuensi kerja 1/12 kali frekuensi osilator sedangkan frekuensi kerja AVR sama dengan frekuensi osilator. Jadi dengan frekuensi osilator yang sama, kecepatan AVR 12 kali lebih cepat dibanding kecepatan MCS51.
6
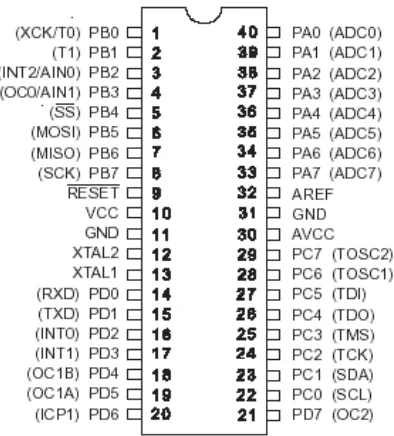
Konfigurasi pin mikrokontroler Atmega16 dengan kemasan 40 pin dapat dilihat pada Gambar 2.1. Dari gambar tersebut dapat terlihat ATMega16 memiliki 8 pin untuk masing-masing port A , port B, port C, dan port D.
Gambar II.1 Konfigurasi Mikrokontroler ATmega16
Adapun fitur Mikrokontroler ATMega16 kapabilitas detail dari adalah sebagai berikut : [3]
1. Mikrokontroler AVR 8 bit yang memiliki kemampuan tinggi, dengan
daya rendah.
2. Arsitektur RISC dengan throughput mencapai 16 MIPS pada
frekuensi 16MHz.
3. Memiliki kapasitas Flash memori 16 KByte, EEPROM 512 Byte dan
SRAM 1 KByte.
4. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port
D.
5. CPU yang terdiri atas 32 buah register. 6. Unit interupsi internal dan eksternal. 7. Port USART untuk komunikasi serial.
7
Arsitektur ATMega16 mempunyai dua memori utama, yaitu memori data dan memori program. Selain itu, ATMega16 memiliki memori EEPROM untuk menyimpan data. ATMega16 memiliki 16 Kbyte On-chip di dalam sistem Reprogrammable Flash Memory untuk menyimpan program. Instruksi ATMega16 semuanya memiliki format 16 atau 32 bit, maka memori flash diatur dalam 8K x 16 bit.
Memori data (SRAM) AVR ATMega16 terbagi menjadi 3 bagian, yaitu 32 register umum, 64 buah register I/O dan 1 Kbyte SRAM internal. General purpose register menempati alamat data terbawah, yaitu $00 sampai $1F. Sedangkan memori I/O menempati 64 alamat berikutnya mulai dari $20 hingga $5F. Memori I/O merupakan register yang khusus digunakan untuk mengatur fungsi terhadap berbagai fitur mikrokontroler seperti kontrol register, timer atau counter, fungsi-fungsi I/O, dan sebagainya. 1024 alamat berikutnya mulai dari $60 hingga $45F digunakan untuk SRAM internal.
8
Gambar 2.2 Blok diagram fungsional Atmega16 [3]
Dari gambar blok diagram tersebut dapat dilihat bahwa ATMega16 memiliki bagian-bagian sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C dan port D. 2. ADC 8 channel 10 bit.
3. Tiga buah Timer atau Counter dengan kemampuan pembanding. 4. CPU yang terdiri atas 32 buah register.
5. Watchdog timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 KB dengan kemampuan Read While Write. 8. Interruptinternal dan eksternal
9. Port antarmuka SPI (Serial Peripheral Interface).
10.EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11.Antarmuka komparator analog.
9 2.2.2 Driver Motor
Motor listrik sudah menjadi kebutuhan kita sehari-hari untuk menggerakkan peralatan dan mesin yang membantu perkerjaan. Motor listrik memiliki berbagai ukuran, tergantung pada besarnya daya putar yang dihasilkannya. Sebuah motor listrik menggunakan energi listrik untuk menghasilkan energi mekanis. Proses kebalikan, yang menggunakan energi mekanis untuk menghasilkan energi listrik, dilakukan dengan sebuah genertor atau dinamo. Motor-motor traksi yang dulu digunakan pada lokomotif sering memiliki fungsi ganda bila lokomotif tersebut dilengkapi dengan pengerem dinamis.
Gambar 2.3 Bentuk fisik driver motor L298N
Motor listrik bekerja dengan elektromagnetisme, tetapi motor yang berdasarkan penomena elektromekanis, seperti gaya elektro statis dan efek piezoelectrik dan motor thermal. Prinsip dasar pada motor yang berbasis elektromagnetik adalah memanfaatkan gaya mekanis pada kawat-kawat pembawa arus yang berada di dalam sebuah medan magnet. [4]
2.2.3 Motor DC (Power Window)
10
Motor arus searah (DC) berfungsi mengubah energi listrik menjadi energi mekanik, dalam hal ini energi listrik yang diubah adalah listrik arus searah atau DC (Direct Current). Prinsip dasar dari motor adalah motor arus searah hampir sama dengan motor arus bolak-balik, yang membedakannya adalah motor arus searah dilengkapi dengan komutator yang berfungsi mengubah arus bolak-balik menjadi arus searah. [5]
Gambar 2.4 Bentuk fisik motor DC ( Power Window) [5]
Ada tiga macam pokok yang menjadi dasar kerja sebuah motor listrik yaitu: [5]
1. Adanya fluks magnet yang dihasilkan oleh kutub-kutub magnet.
2. Adanya kawat penghantar listrik, yang merupakan tempat terbentuknya gaya gerak listrik atau aliran listrik.
3. Gerakan relatif antara fluks dengan kawat penghantar listrik, dalam hal ini boleh fluks magnetnya tetap, sedangkan kawat penghantarnya yang bergerak atau sebaliknya.
Faktor-faktor yang harus diperhatikan dalam menentukan penilaian dari performa sebuah motor dan pengaruh kecocokannya sebagai penggerak diantaranya adalah daya, torsi dan kecepatan. Kecepatan putar motor DC (N) dapat dirumuskan dengan persamaan di bawah ini :
N =
Dimana :
11 IA= Arus Jangka
RA= Hambatan Jangkar k = Konstanta Motor Φ = Fluks Magnet
Motor listrik DC tersusun dari dua bagian yaitu bagian diam (stator) danbagian bergerak (rotor). Stator motor arus searah adalah badan motor atau kutub magnet, sedangkan yang termasuk rotor adalah jangkar lilitannya. Pada motor, kawat penghantar listrik yang bergerak tersebut pada dasarnya merupakan lilitan yang berbentuk persegi panjang yang disebut kumparan. [5]
2.2.4 RTC DS1307
Real-time clock adalah jam di komputer yang umumnya berupa sirkuit terpadu yang berfungsi sebagai pemelihara waktu. RTC umumnya memiliki catu daya terpisah dari catu daya komputer (biasanya berupa baterai litium) sehingga dapat tetap berfungsi ketika catu daya pada komputer terputus. Kebanyakan RTC menggunakan osilator kristal.
12
Gambar2.5 IC Real Time Clock [6]
Penjelasan dari masing-masing kaki adalah sebagai berikut : [6] 1. X1 dan X2 adalah pin yang di hubungkan dengan kristal32.768 KHz. 2. VBAT adalah pin yang di hubungkan masukan baterai +3V.
3. GND adalah pin yang di hubungkan Ground.
4. SDA adalah pin yang di fungsikan sebagai jalur data. 5. SCL adalah pin yang di fungsikan sebagai jalur clock.
6. SQW atau OUT adalah pin yang di gunakan sebagai keluaran sinyal kotak. 7. VCC adalah pin untuk mencatu tegangan 5V.
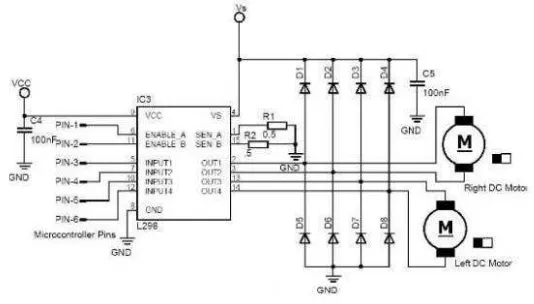
2.2.5 IC L298 Motor Driver
L298 adalah jenis IC driver motor yang dapat mengendalikan arah putaran dan kecepatan motor DC ataupun Motor stepper. Driver motor L298 mampu mengeluarkan output tegangan untuk Motor DC dan motor stepper sebesar 50 volt. IC L298 terdiri dari Transistor Transistor Logic (TTL) dengan gerbang nand yang memudahkan dalam menentukkan arah putaran suatu motor DC dan motor stepper.[7]
Karakteristik IC L298N ini sebagai berikut : [7] 1. Tegangan masukan maksimum 4,5 - 46 Volt 2. Tegangan logic maksimum = 7 Volt
3. Arus keluaran maksimum per kanal = 2 Ampere 4. Level saturasi tegangan yang rendah
13
Gambar 2.6 IC L298N [7]
2.2.6 Motor Servo
Motor Servo adalah sebuah motor dengan sistem umpan balik tertutup dimana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada didalam servo motor. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu servo motor diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
Gambar 2.7 Konfigurasi Motor Servo
Motor DC servo merupakan alat untuk mengubah energi listrik menjadi energi mekanik, maka magnet permanen motor DC servo yang mengubah energi listrik ke dalam energi mekanik melalui interaksi dari dua medan magnet.
14
tersebut. Saat motor berputar, arus pada kumparan motor menghasilkan torsi yang nilainya konstan.
Secara umum terdapat 2 jenis motor servo :
1. Servo Motor Standard, Servo motor tipe standar hanya mampu berputar 180 derajat.
2. Servo Motor Continuous, Servo motor continuous dapat berputar sebesar 360 derajat.
Pengendalian gerakan servo motor dapat dilakukan dengan menggunakan metode PWM (Pulse Width Modulation). Teknik ini menggunakan sistem lebar pulsa untuk mengemudikan putaran motor. Sudut dari sumbu servo motor diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor.
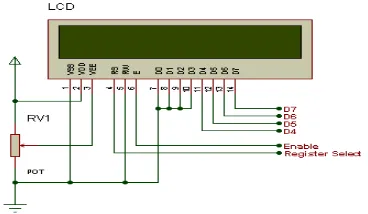
2.2.7 LCD 16 x 2
Liquid Crystal Display (LCD) merupakan sebuah teknologi layar digital yang menghasilkan citra pada sebuah permukaan yang rata (flat) dengan memberi sinar pada kristal cair dan filter berwarna, yang mempunyai struktur molekul polar, diapit antara dua elektroda yang transparan. Bila medan listrik diberikan, molekul menyesuaikan posisinya pada medan, membentuk susunan kristal yang mempolarisasi cahaya yang melaluinya.
Teknologi yang ditemukan semenjak tahun 1888 ini, merupakan pengolahan kristal cair, yaitu cairan kimia. Dimana molekul-molekulnya dapat diatur sedemikian rupa bila diberi medan elektrik seperti molekul-molekul metal bila diberi medan magnet. Bila diatur dengan benar, sinar dapat melewati kristal cair tersebut.
15
LCD (Liquid Crystal Display) dibagi menjadi dua bagian yaitu bagian depan panel LCD (Liquid Crystal Display) yang terdiri dari banyak titik LCD (Liquid Crystal Display) dan mikrokontroler yang menempel pada bagian belakang panel LCD yang berfungsi untuk mengatur titik-titik LCD sehingga dapat menampilkan huruf, angka, dan simbol khusus yang dapat terbaca.
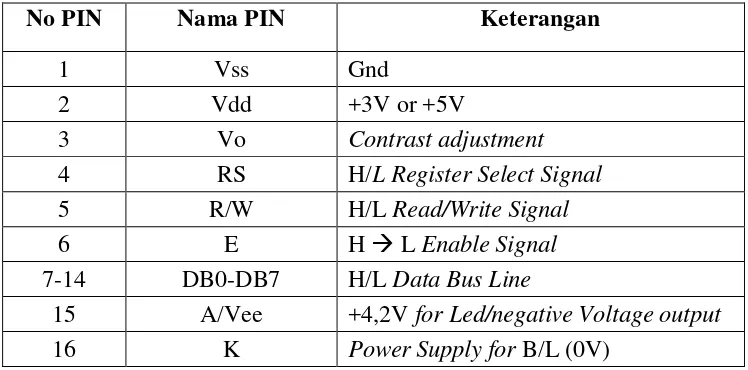
Modul LCD (Liquid Crystal Display) berukuran 16 karakter x 2 baris dengan fasilitas backlighting memiliki 16 pin yang terdiri dari 8 jalur data, 3 jalur kontrol dan jalur untuk catu daya, dengan fasilitas pin yang tersedia maka LCD 16 x 2 dapat digunakan secara maksimal untuk menampilkan data yang dikeluarkan oleh mikrokontroler, secara ringkas fungsi pin-pin pada LCD dituliskan pada tabel di bawah ini :
Tabel 2.1. Alokasi pin LCD 16x2
No PIN Nama PIN Keterangan
1 Vss Gnd
2 Vdd +3V or +5V
3 Vo Contrast adjustment
4 RS H/L Register Select Signal
5 R/W H/L Read/Write Signal
6 E H L Enable Signal
7-14 DB0-DB7 H/L Data Bus Line
15 A/Vee +4,2V for Led/negative Voltage output
16 K Power Supply for B/L (0V)
Sedangkan secara umum pin-pin LCD diterangkan sebagai berikut : Pin 1 dan 2 merupakan sambungan catu daya, Vss dan Vdd. Pin Vdd dihubungkan dengan tegangan positif, dan Vss pada 0V atau ground. Meskipun data menentukan catu daya 5 Vdc, menyediakan 6V dan 4.5V yang keduanya bekerja dengan baik, bahkan 3V cukup untuk beberapa modul.
16
2. Pin 4 merupakan Register Select (RS), masukan yang pertama dari tiga command control input. Dengan membuat RS menjadi high, data karakter dapat ditransfer dan menuju modulnya.
3. Pin 5 merupakan Read/Write (R/W), untuk memfungsikan sebagai perintah write maka R/W low atau menulis karakter ke modul. R/W high untuk membaca data karakter atau informasi status dari register.
4. Pin 6 merupakan Enable (E), input ini digunakan untuk transfer aktual dari perintah-perintah atau karakter antara modul dengan hubungan data. Ketika menulis ke display, data ditransfer hanya pada perpindahan high atau low. Tetapi ketika membaca dari display, data akan menjadi lebih cepat tersedia setelah perpindahan dari low ke high dan tetap tersedia hingga sinyal low lagi. 5. Pin 7 sampai 14 adalah delapan jalur data bus (D0 sampai D7) dimana data
dapat ditransfer dari display.
6. Pin 16 dihubungkan kedalam tegangan 5 Volt untuk memberi tegangan dan menghidupkan lampu latar atau Back Light LCD.[8]
2.2.8 Regulator
Regulator atau catu daya merupakan suatu rangkaian elektronik yang mengubah arus listrik bolak-balik AC (Alternating Current) menjadi arus listrik searah DC (Direct Current). Hampir semua peralatan elektronik membutuhkan catu daya agar dapat berfungsi. Regulator berfungsi untuk mengatur besar arus listrik yang masuk kedalam rotor coil sehingga tegangan yang dihasilkan oleh alternator tetap seimbang walaupun putarannya berubah-ubah.
17 2.2.9 Push Button
Push Button adalah saklar tekan yang berfungsi untuk menghubungkan atau memisahkan bagian-bagian dari suatu instalasi listrik satu sama lain suatu sistem saklar tekan push button terdiri dari saklar tekan start. Stop reset dan saklar tekan untuk emergency.
Prinsip kerja Push Button adalah apabila dalam keadaan normal tidak ditekan maka kontak tidak berubah, apabila ditekan maka kontak NC akan berfungsi sebagai stop dan kontak NO akan berfungsi sebagai start biasanya digunakan pada sistem pengontrolan motor-motor induksi untuk menjalankan mematikan motor.
Gambar 2.10 Konfigurasi Push Button
2.2.10 InfraRed (IR)
InfraRed merupakan sebuah sensor yang masuk dalam kategori sensor optik. Secara umum seluruh infrared didunia bekerja optimal pada frekuensi 38,5 KHz. Kurva karakteristik infrared membandingkan antara frekuensi dengan jarak yang dicapainya. Kalau frekuensi di bawah puncak kurva atau lebih dari puncak kurva, maka jarak yang dapat dicapai akan pendek.
18
Ada dua metode utama dalam perancangan pemancar sensor infrared, yaitu :
1. Metode langsung, dimana infra red diberi bias layaknya rangkaian led biasa. 2. Metode dengan pemberian pulsa, mengacu kepada kurva karakteristik
infrared tersebut.
Metode pemberian pulsa juga masih rentan terhadap gangguan frekuensi luar, maka kita harus menggunakan teknik modulasi, dimana akan ada dua frekuensi yaitu frekuensi untuk data dan frekuensi untuk pembawa. Dengan teknik ini, maka penerima akan membaca data yang sudah dikirimkan tersebut.
Untuk aplikasi lebih lanjut, misalnya untuk mikrokontroler kita membutuhkan keluaran yang diskrit, dimana hanya logika satu atau nol yang di butuhkan. Kondisi ini harus kita lengkapi dengan rangkaian komparator, atau masuk ke transistor sebagai saklar. Kalau kita menggunakan data dengan teknik modulasi maka data yang dikirim harus difilter, berarti kita harus merancang filter yang akan membuang frekuensi tersebut, lalu masuk ke rangkaian buffer atau transistor sehingga keluarannya berupa sinyal diskrit.[9]
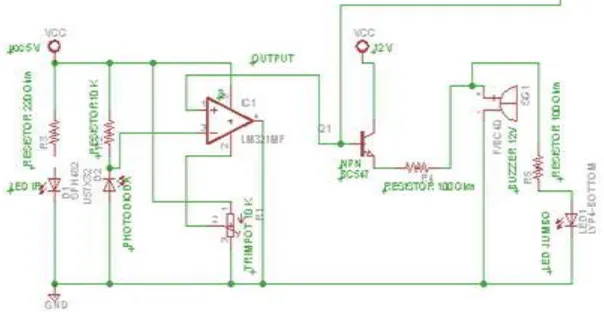
Komponen yang dibutuhkan: 1. IC LM393
2. Resistor Variabel/Trimport 10K ohm 3. Resistor 10K, 470 ohm, 1K, 22K 4. Transistor 2N3904
5. PhotoTransistor / Photodioda
2.2.11 Buzzer
19
menghasilkan suara. Buzzer biasa digunakan sebagai indikator bahwa proses telah selesai atau terjadi suatu kesalahan pada sebuah alat (alarm).
Gambar 2.12 Buzzer
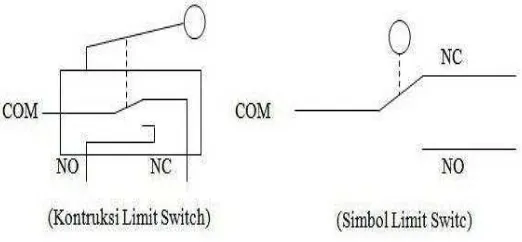
2.2.12 Limit Switch
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Prinsip kerja limit switch sama seperti saklar push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas penekanan tertentu yang telah ditentukan dan akan memutus saat katup tidak ditekan. Limit switch termasuk dalam kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor tersebut. Penerapan dari limit switch adalah sebagai sensor posisi suatu benda yang bergerak.
20 Limit switch umumnya digunakan untuk :
1. Memutuskan dan menghubungkan rangkaian menggunakan objek atau benda lain.
2. Menghidupkan daya yang besar, dengan sarana yang kecil. 3. Sebagai sensor posisi atau kondisi suatu objek.
SISTEM PENGONTROLAN PAKAN IKAN OTOMATIS
DI TAMBAK BERBASIS MIKROKONTROLER ATMEGA16
TUGAS AKHIR
Disusun Untuk Memenuhi Syarat Kelulusan Program Studi Diploma Tiga Teknik Komputer
Oleh
Johan Purwanto
NIM : 10810012
Pembimbing
Hidayat, S.Kom, MT.
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
vi
DAFTAR ISI
LEMBAR
PENGESAHAN... i
LEMBAR
PERNYATAAN...ii
ABSTRAK...iii
KATA PENGANTAR...iv
DAFTAR ISI...vi
DAFTAR GAMBAR...ix
DAFTAR TABEL...xi
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1 1.2 Maksud dan Tujuan ... 1 1.3 Batasan Masalah ... 2 1.4 Metode Pelaksanaan ... 2 1.5 Sistematika Penulisan ... 2 BAB II TEORI PENUNJANG ... 4
vii
2.2.9 Push Button ... 17
2.2.10 InfraRed (IR) ... 17
2.2.11Buzzer ... 18
2.2.12Limit Switch ... 19
BAB III PERANCANGAN SISTEM ... 21
3.1 Diagram Blok Sistem ... 21
3.2 Perancangan Perangkat Keras ... 22
3.2.1 Konsep rangka rel ... 22
3.2.2 Rangkaian secara keseluruhan ... 23
3.2.3 Driver motor L298N ... 24
3.2.4 Modul RTC DS1307... 24
3.2.5 LCD 16 x 2 ... 25
3.2.6 Sensor InfraRed ... 27
3.2.7 Mikrokontroler ATMega16 ... 27
3.2.8 Regulator ... 30
3.2.9 Buzzer ... 30
3.2.10 Led ... 31
3.2.11 Mekanik Pakan Ikan Otomatis Di Kolam ... 32
3.3 Perancangan Sistem ... 33
3.3.1 Algoritma Diagram alair Perancangan Alat Secara Keseluruhan... 33
3.3.2 Diagram alir prosedur pengaturan jam dan tanggal ... 35
BAB IV PENGUJIAN DAN ANALISA ... 38
4.1 Pengujian Driver motor L298N ... 38
4.2 Rangkaian LCD ( 16 x 2) ... 39
4.3 Modul RTC (Real Time Clock) ... 39
viii
4.5 Pengujian Infrared, Buzzer, Lampu ... 42
4.6 Pengujian pada limit switch ... 42
4.7 Pengujian Alat Keseluruhan ... 43
BAB V KESIMPULAN DAN SARAN ... 44
5.1 Kesimpulan ... 44
5.2 Saran ... 44
DAFTAR PUSTAKA ... 45
LAMPIRAN I ... 46
45
DAFTAR PUSTAKA
[1] Afriyanti, N. (2008). Sistem Pengontrolan Pakan Ikan Otomatis Berbasis Atmega8535. Skripsi. Yogyakarta: Universitas Negri Yogyakarta.
[2] Sahwan, M. F,. (1999). Arti Penting Pakan Bagi Ikan . Dipetik Januari 5, 2015, dari http://hobiikan.blogspot.com/2008/09/arti-penting-pakan-bagi-ikan.html
[3] Anggraini, D. (2010). Aplikasi Mikrokontroler Atmega16 Sebagai Pengontrol Sistem Emergency dan Lampu Jalan yang Dilengkapi
Dengan Sensor Cahaya (LDR) Pada Miniatur Komplek Perumahan
Modern.Skripsi. Semarang: Universitas Diponogoro
[4] Saputra, S. (2014). Driver Motor L298N H-Bridge. Dipetik Januari 6, 2015, dari http://www.robot-id.com/2014/02/cara-membuat-robot-line-follower.html
[5] Hidayat, D. (2012). Prinsip Kerja Power Window. Pekanbaru: Power Window
[6] Fahmizal. (2012). Jam Digital Dengan RTC DS1307 Berbasis Mikrokontroler Atmega16. Padang: Robotika dan Mikrokontroler.
[7] Hufaidillah, G. (2014). Perancangan Mobile Robot untuk Monitoring Ruangan yang Dikendalikan Menggunakan Jaringan LAN (Local Area
Network) Secara Wireless. Skripsi. Bandung: Universitas Komputer Indonesia
[8] Bascara. (2013, Januari 24). Licuid Crystal Display (LCD). Dipetik Januari 8, 2015, dari http://baskarapunya.blogspot.com/2013/01/liquid-crystal-display-lcd-16-x-2.html .
[9] Hufaidillah, G. (2013). Penjelasan dan Rangkaian Sensor Infrared. Bandung: Berbagi Ilmu Komputer dan Elektronika
DAFTAR RIWAYAT HIDUP
DATA PRIBADI
Nama : Johan Purwanto
Tempat dan tanggal lahir : Bandung, 20 Januari 1989
Agama : Islam
Jenis Kelamin : Laki-laki
Kebangsaan : Indonesia
Alamat : Komplek PLN (Saguling) Cioray,RT: 01 RW: 09
Jalan Rajamandala,Kecamatan Cipatat, Kabupaten Bandung Barat 40574
No. Telepon : 085659115222
Email : [email protected]
DATA PENDIDIKAN
SD Negri Pasirnangka : 1996 - 2002
1
SISTEM PENGONTROLAN PAKAN IKAN OTOMATIS DI KOLAM BERBASIS MIKROKONTROLER ATMEGA16
Hidayat1, Johan Purwanto2
1,2
Jurusan Teknik Komputer Unikom, Bandung
, 2johan412 @rocketmail.com
ABSTRAK
Dalam dunia modern ini, perkembangan teknologi telah membuat kehidupan manusia kepada hal yang bersifat otomatis. Sistem Pengontrolan Pakan Ikan Otomatis Di kolam Berbasis mikrokontroler Atmega16 ini adalah suatu alat yang berfungsi sebagai pengganti tenaga manusia untuk memberi makan ikan pada sebuah kolam. Alat ini di kontrol oleh sebuah software berbasis mikrokontroler untuk melakukan proses buka tutup katup makanan ikan yang dikendalikan oleh motor secara otomatis. Mikrokontroler ATMega16 digunakan untuk penyimpanan program serta untuk menjalankan alat ini dan motor DC yang digunakan untuk menebarkan pakan, yaitu dengan cara maju dan mundur sehingga pakan dapat tersebar dengan baik. Alat ini dapat memberikan pakan selama 2-3 kali sehari, sehingga pengguna dapat leluasa meninggalkan kolam yang dimillikinya. Cara kerja alat ini adalah bila waktu menunjukan untuk pemberian pakan, maka alat ini akan maju dan sambil membuka pintu pakan tersebut sampai limit switch 1 tertekan, kemudian alat ini akan mundur sambil menutup pakan ikan tersebut sampai limit switch 2 tertekan, alat ini akan berhenti. Dan apabila sensor tersambung maka akan memberikan alarm berupa suara serta cahaya.
Kata kunci : Otomatisasi, Pemberi pakan ikan, Atmega16, Driver Motor, limit switch
1. PENDAHULUAN
Menernakkan ikan di dalam kolam harus diperhatikan waktu pemberian pakannya, sehingga ikan tersebut membutuhkan makanan yang teratur dan terus menerus. Ternak ikan adalah suatu hobi masyarakat yang sangat digemari dari dulu sampai saat ini, karena kemudahan dalam perawatannya. Sehingga membuat semua orang ingin menernakkan ikan tersebut apalagi menjadikan ikan tersebut sebagai peluang untuk bisnis.
Hanya saja ada kesulitan ketika seseorang harus bepergian hingga dapat memakan waktu yang sangat lama, pasti akan berpikir bagaimana ikan ternaknya. Lalu, bagaimana agar memberi pakan ikan-ikan tersebut dengan terjadwal secara terus menerus tanpa harus mengganggu aktivitas kita sehari-hari. [1] Dalam dunia modern ini, perkembangan
teknologi telah memungkinkan kepada
kehidupan manusia untuk melakukan suatu hal yang bersifat otomatis. Karena adanya
otomatisasi, maka akan menggeser
penggunaan manual kearah otomatis.
Berdasarkan latar belakang diatas, maka penulis memberikan solusi dengan merancang alat untuk tugas akhir ini dengan judul
“SISTEM PENGONTROLAN PAKAN IKAN
OTOMATIS DI KOLAM BERBASIS
MIKROKONTROLER ATMEGA16”
2. PERANCANGAN
Perancangan yang dilakukan terdiri dari perancangan perangkat keras dan perancangan perangkat lunak.
Perancangan Perangkat Keras
Hidayat, Johan Purwanto
2
Gambar 1. Diagram Blok
Keterangan untuk diagram blok pakan ikan otomatis di kolam adalah sebagai berikut:
1. Push Button : Sebagai input dalam
pengiriman data untuk proses
pengaturan waktu
waktu dalam pemberian pakan ikan
4. RTC : Sebagai penyimpan
pintu dari tempat pakan ikan
7. Sensor IR : Sebagai sensor untuk
mengetahui ada atau tidak adanya pakan ikan
8. Buzzer & LED : Sebagai indikator
apabila pakan ikan dalam wadah akan habis.
Berikut merupakan penjelasan dalam perancangan diagram blok sistem dari pakan ikan otomatis yaitu :
1. Push Button merupakan sebuah komponen dalam masukan data yang akan diproses oleh mikrokontroler untuk pengaturan waktu yang akan dikirim lewat LCD 16 x 2.
2. Mikrokontroler ATMega 16 yang
berfungsi sebagai perangkat dalam memproses data untuk melakukan
eksekusi pada Motor DC (Power
Window) dan Motor Servo untuk
pembuka pakan bila waktu yang ditetapkan telah tiba.
3. RTC digunakan bila tidak adanya aliran
listrik dan akan mengirim sinyal ke LCD sehingga tidak akan mengubah waktu yang sudah berjalan.
4. Sensor Infrared sebagai sensor untuk
mengetahui ada atau tidak adanya pakan ikan, bila pakan ikan tersebut habis maka mikrokontroler akan mengirimkan sinyal untuk menyalakan buzzer dan lampu.
Dari skematik rangkaian di bawah
menggambarkan beberapa komponen yang digunakan dalam perancangan alat sistem pengontrolan pakan ikan otomatis di kolam,
yang menggunakan sistem minimum
Atmega16 disambungkan dengan driver motor, limit switch, lcd 16 x 2, RTC DS1307, dan Infrared.
Hidayat, Johan Purwanto
3
Dalam perancangan sistem pengontrolan pakan ikan otomatis ini menggunakan driver motor L298N yang digunakan untuk mengatur laju
motor DC (Power window). IC L298N dapat
mengendalikan arah putaran dan mengatur kecepatan motor DC.
Pada rangkaian di bawah adalah skematik
untuk menjalankan motor DC (Power
Window), dimana motor tersebut akan diletakkan untuk menjalankan alat pakan ikan tersebut.
IC L298N memiliki 2 power stage,
power stage yaitu dikeluaran motor A dan
motor B. Power Stage adalah sebuah
konfigurasi bridge, dimana keluarannya dapat
men-drive sebuah induktif load secara mode
umum atau difensial tergantung masukan state. Arus yang mengalir keluar dari rangkaian bridge akan keluar melalui keluaran sense.
Setiap bridge akan di drive oleh AND gate dapat menunjukkan waktu dalam detik, menit, jam, tanggal, bulan dan tahun. RTC ini didesain dengan 128 lokasi RAM yang terdiri
dari 15 byte untuk data waktu serta kontrol,
dan 113 byte sebagai RAM yang dapat
digunakan sebagai RAM pada umumnya. RTC
DS 1307 menggunakan bus yang termultipleks sehingga bisa menghemat penggunaan pin pada mikrokontroler.
Prinsip kerja dari rangkaian di bawah adalah Pin VCC dari RTC dihubungkan dengan tegangan sebesar 5 Vdc. Sinyal osilasi disediakan melalui kristal 32,72 KHz yang dihubungkan dengan pin X1 dan X2.
Keperluan untuk back up suply yang
dibutuhkan untuk mempertahankan data waktu RTC disediakan oleh bateri dengan tegangan sebesar 3 Vdc, yang dihubungkan dengan pin VBAT. Sedangkan untuk proses komonikasi data waktu dengan sistem keseluruhan diatur melalui SCL dan SDA. SCL itu adalah Sebagai clock untuk input ke I2C digunakan untuk mengsinkronisasi pergerakan data dalam serial interface. Bersifat open drain oleh sebab itu
membutuhkan external pull up resistor.
Sedangkan SDA adalah yang berfungsi sebagai
masukan/keluaran untuk I2C serial interface
tersebut.
Di dalam alat ini pin RTC
dihubungkan dengan pin di mikrokontroler Atmega16 yaitu SDA pada PORTC 1dan SCL pada PORTC 0.
Gambar 4. Skematik Modul RTC DS1307
Hidayat, Johan Purwanto
4
Dalam pengontrolan pakan ikan
otomastis hubungan LCD 16x2 digunakan untuk mengetahui jam yang ada pada alat. LCD 16x2 memiliki 8 saluran data (D0-D7) dan kontrol yang terdiri atas Enable (E) yang berfungsi sebagai Enable Clock LCD, dengan logika 1 setiap kali pengiriman atau pembacaan data, sinyal Read/Write (R/W), Register Select (RS) adalah pin yang berfungsi sebagai selektor register (register sellect) dengan memberikan logika low (0) sebagai register perintah dan logika high (1) sebagai register data, ditambah jalur catu daya: Vss
(ground), Vdd (Vcc, 5V), dan Vee (contrast
control). Pada umumnya, Vee ini dihubungkan
ke pembagi tegangan (potensiometer) antara
VCC dan Ground. Karena LCD yang
digunakan mempunyai backlamp, maka
ditambahkan 2 pin yaitu: pin ke-15 berfungsi untuk catu daya +5 Volt dan pin ke16
berfungsi sebagai ground. Pada alat ini, yang
digunakan adalah PORTC di mana RS terdapat di PORTC.2. E PORTC.3. Pada rangkaian LCD, yang digunakan untuk menampilkan
karakter adalah LCD 16x2 dimana
Gambar 5 Konfigurasi LCD 16x2
Pada rangkaian infrared digunakan sebagai
alat sensor untuk mengetahui keadaan pakan ikan ada atau tidak adanya. Cara kerja sensor IR adalah hanya memanfaatkan sifat cahaya yang akan dipantulkan jika mengenai benda berwarna terang dan akan diserap jika mengenai benda berwarna gelap.
Dilihat dari skematik di bawah pada rangkaian ini saya menggunakan LM393 sebagai IC infrared dimana kaki 1 digunakan sebagai keluaran untuk mengetahui terhalang atau tidaknya led IR dan photodioda, kaki 2 akan disambungkan ke trimpot 10K untuk mengatur resistansi jarak antara photodioda dan IR, kaki 3 akan disambongkan ke rangkaian photodiada dan IR, kaki 4 akan
disambungkan ke ground, sedangkan kaki 8
akan disambungkan ke vcc 5 Volt. Keluaran
pada LM393 ini akan masuk ke
Mikrokontroler Atmega16 yang akan diproses untuk mengaktifkan buzzer dan led.
Alat ini akan diletakan pada tempat pakan ikan dimana bila pakan ikan tersebut menghalangi transmiter dari IR tidak akan membaca, dan apabila pakan tersebut tidak
menghalangi maka IR akan membaca
transmiternya dan akan memberikan sinyal bahwa pakan tersebut akan habis.
Gambar 6 Konfigurasi Sensor Infrared
Mikrokontroler yang digunakan dalam
pembuatan Pakan Ikan Otomatis ini yaitu mikrokontroler jenis ATMega16. Mengapa memilih mikrokontroler ATMega16 karena banyak sekali fitur-fitur yang mendukung yaitu harga mikrokontroler ini tergolong murah saat ini jika dilihat dari fasilitas yang dimilikinya,
memiliki 4 port yang dapat digunakan untuk
input dan output, adanya timer, terdapat ADC internal 8 channel 10 bit analog digital converter, EEPROM (Electrically Erasable Programmable Read Only Memory) 512 byte
dan terdapat osilator internal & osilator
exsternal yang dapat di up sampai 16 MHz.
Hidayat, Johan Purwanto
Gambar 7. Rangkaian Mikrokontroler ATMega16
Pada rangkaian buzzer digunakan sebagai indicator suara yang diberikan sinyal oleh mikrokontroler.
Pada skematik rangkaian di bawah
menjelaskan buzzer yang terhubung
kemikrokontoler menggunakan aktif high dimana pengguna menggunkan trasnsistor NPN. VCC 5 volt akan masuk ke kaki buzzer
(+), sedangkan kaki buzzer (-) akan
tersambung dengan kaki trasnsistor. Pada transistor kaki 1 yaitu emiter akan terhubung ke ground, kaki 2 yaitu basis akan terhubung ke resistor 10 k dan mikrokontroler tepatnya dikaki PORTB.1, sedangkan kaki 3 yaitu collector akan tersambung melalui kaki buzzer.
Gambar 8. Rangkaian Buzzer
Pada skematik rangkaian di bawah
menjelaskan buzzer yang terhubung
kemikrokontoler menggunakan aktif high dimana pengguna menggunkan trasnsistor
NPN. Vcc 5 volt akan masuk ke resistor 330 Ω
yang kemudian akan masuk ke kaki led (+) sedangkankan pada kaki led (-) akan tersambung ke transistor NPN. Pada transistor kaki 1 yaitu emiter akan terhubung ke ground, kaki 2 yaitu basis akan terhubung ke resistor 10 k dan mikrokontroler tepatnya dikaki PORTB.2, sedangkan kaki 3 yaitu collector akan tersambung melalui kaki led.
Hidayat, Johan Purwanto
6
Perancangan Perangkat Lunak
Berikut merupakan alur secara umum yang akan digambarkan pada diagram alir program yang akan dibahas yaitu :
MULAI
MOTOR SERVO BERJALAN KONDISI MENUTUP 1
Gambar 5. Diagram alir program utama mikrokontroler
Tabel 1.Keterangan diagram alir secara umum
No Keterangan
1 Mulai
2 Inisialisai pada port
3 Scaning data pada RTC
4 Apakah data RTC sudah masuk
5 Jika data RTC sudah masuk maka masuk
ke prosedur setting jam dan tanggal
6 Apakah sudah menyeting RTC
7 Jika sudah akan menampilkan ke LCD 16
x 2
8 Jika jam 09:00:00
9 Motor DC berjalan maju
10 Motor Servo berjalan terbuka
11 Apakah alat menekan limit switch 1
12 Motor DC berjalan mundur
13 Apakah alat menekan limit switch 2
14 Motor DC berhenti
15 Motor Servo berjalan tutup
16 Selesai
Diagram alir prosedur pengaturan jam dan tanggal
Hidayat, Johan Purwanto
SETTING JAM SETTING MENIT SETTING DETIK
DATA DISIMPAN DATA DISIMPAN DATA DISIMPAN
MENGEMBALIKAN
TANGGAL SETTING BULAN SETTING TAHUN
DATA DISIMPAN DATA DISIMPAN DATA DISIMPAN
MENGEMBALIKAN
Hidayat, Johan Purwanto
8
Tabel 2. Keterangan Diagram alir prosedur pengaturan jam dan tanggal
No Keterangan
1 Mulai
2 Scaning data Jam dan Tanggal 3 Apakah push button 0 ditekan 4 Jika tidak, apakah push button 1
ditekan
5 Jika push button 0 ditekan maka akan setting untuk ganti waktu
6 Apakah push button 1 ditekan, jika tidak langsung selesai
7 Apakah push button1 ditekan 8 Jika tidak, apakah push button 2
ditekan
9 Jika tidak, apakah push button 3 ditekan jika tedak langsung selesai 10 Jika push button 1 ditekan, maka
akan menampilkan setting jam 11 Data disimpan
12 Apakah push button 4 ditekan, jika tidak masuk ke simpan data
13 Jika push button 4 ditekan maka akan masuk ke tombol enter
14 Akan menampilkan ke LCD 16x2 15 Jika push button 2 ditekan, maka
akan masuk ke setting menit 16 Data disimpan
17 Apakah push button 4 ditekan, jika tidak masuk ke simpan data
18 Jika push button 4 ditekan maka akan masuk ke tombol enter
19 Akan menampilkan ke LCD 16x2 20 Jika push button 3 ditekan, maka
akan masuk ke setting detik 21 Data disimpan
22 Apakah push button 4 ditekan, jika tidak masuk ke simpan data
23 Jika push button 4 ditekan maka akan masuk ke tombol enter
24 Akan menampilkan ke LCD 16x2 25 Apakah push button 1 ditekan 26 Jika push button 1 ditekan, maka
akan menampilkan setting tanggal 27 Data disimpan
28 Apakah push button 4 ditekan, jika tidak masuk ke simpan data
29 Jika push button 4 ditekan maka akan masuk ke tombol enter
30 Akan menampilkan ke LCD 16x2 31 Apakah push button 2 ditekan 32 Jika push button 2 ditekan, maka
akan menampilkan setting bulan 33 Data disimpan
34 Apakah push button 4 ditekan, jika tidak masuk ke simpan data
35 Jika push button 4 ditekan maka akan masuk ke tombol enter
36 Akan menampilkan ke LCD 16x2 37 Apakah push button 3 ditekan 38 Jika push button 3 ditekan, maka
akan menampilkan setting bulan 39 Data disimpan
40 Apakah push button 4 ditekan, jika tidak masuk ke simpan data
41 Jika push button 4 ditekan maka akan masuk ke tombol enter
42 Akan menampilkan ke LCD 16x2 43 Selesai
3. HASIL PENGUJIAN
Pada sistem pemberi pakan ikan otomatis berbasis mikrokontroller ATMega16 ini, dalam pengambilan data dilakukan pengamatan pada tiap-tiap bagian atau blok. Untuk dapat melakukan pengamatan, dilakukan pengukuran pada masing-masing blok sistem ataupun komponen yang digunakan sehingga dapat dihasilkan perbandingan antara teoritis dan
secara prakteknya.
3.1 Pengujian Driver motor L298N
Hidayat, Johan Purwanto
9
Tabel 3.1 Pengujian Driver motor L298N
Enable IN+ IN- Kondisi
motor
Masukan Keluaran LCD
Baris ke- 1
PAKAN IKAN PAKAN IKAN
Baris ke-
Tabel 3.3 Modul RTC (Real Time Clock)
NO Tampilan
3.4 Pengujian Motor Servo
Tabel 3.4 Pengujian Motor Servo
Pulsa Motor dibawah
(derajat)
3.5 Pengujian Infrared, Buzzer, Lampu
Tabel 3.5 Pengujian Infrared, Buzzer, Lampu
Kondisi Logic IR Buzzer Lampu
3.6 Pengujian pada limit switch
Tabel 3.6 Pengujian pada limit switch
Limit switch 1
Kondisi Logic pada
mikrokontroler
3.7 Pengujian Alat Keseluruhan
Dalam pengujian alat sistem pengontrolan pakan ikan otomatis ini dapat diketahui bahwa
motor DC (Power Window) akan bergerak bila
Hidayat, Johan Purwanto
10
mikrokontroler akan memberikan logic “1”
pada driver motor untuk menjalankan motor DC dan motor servo. Pada alat sistem pengontrolan pakan ikan otomatis ini tidak akan terpengaruhi oleh arus listrik AC, karena alat ini
menggunakan accu motor 12V sebagai sumber
daya. Di dalam alat ini terdapat sensor IR (Infrared) sebagai indikator apabila pakan dalam alat ini akan habis disertakan dengan buzzer 12V sebagai peringatan suara.
Dari tabel di atas, alat ini dirancang untuk memudahkan manusia dalam memelihara ikan di kolam. Alat ini berjalan 2 arah yaitu maju dan mundur, untuk mundur dan menutup pakan
ikan ini diatur dengan menggunakan limit
switch sebagai patokan ujung dari sebuah rel. Ketepatan waktu yang digunakan dalam alat ini sesuai dengan waktu yang kita butuhkan.
4. SIMPULAN DAN SARAN
Berdasarkan hasil pengujian dan analisis perangkat keras maupun algoritma perangkat lunak dapat disimpulkan bahwa alat dapat berjalan dengan baik sesuai dengan data pengujian yang telah diperoleh sebagai berikut :
1. Bahwa alat ini bergerak dengan
menggunkan motor DC yang diatur
menggunkan waktu, motor servo berfungsi sebagai pembuka dan penutup katup pakan ikan.
2. Alat ini akan mundur dan berhenti yang
diatur oleh limit switch 1 dan limit switch 2,
dimana limit switch 1 digunakan untuk mundur
sedangkan limit switch 2 untuk berhenti.
3. Apabila pakan ikan akan habis maka
terdapat sensor infrared yang akan
memberitahukan kepada kita lewat suara dan cahaya.
Adapun saran untuk pengembangan penelitian ini selanjutnya adalah :
1. Pembuatan system pengontrolan pakan ikan dapat di tambahkan media sms
gateway untuk memberitahukan akan habis pakan ikannya.
2. Pengisisan energy pada aki dapat dilakukan dengan media solar cell.
DAFTAR PUSTAKA
1. Afriyanti, N. (2008). Sistem Pengontrolan
Pakan Ikan Otomatis Berbasis Atmega8535. Yogyakarta: Universitas Negri Yogyakarta
2. Sahwan, M. F,. (1999). Arti Penting
Pakan Bagi Ikan . Dipetik Januari 5, 2015, dari
http://hobiikan.blogspot.com/2008/09/arti-penting-pakan-bagi-ikan.html
3. Anggraini, D. (2010). Aplikasi
Mikrokontroler Atmega16 Sebagai Pengontrol Sistem Emergency dan Lampu Jalan yang Dilengkapi Dengan Sensor Cahaya (LDR) Pada Miniatur Komplek Perumahan Modern. Semarang: Universitas Diponogoro
Window. Pekanbaru: Power Window
6. Fahmizal. (2012). Jam Digital Dengan
RTC DS1307 Berbasis Mikrokontroler Atmega16. Padang: Robotika dan Mikrokontroler.
7. Hufaidillah, G. (2014). Perancangan
Mobile Robot untuk Monitoring Ruangan yang Dikendalikan Menggunakan Jaringan LAN (Local Area Network) Secara Wireless. Bandung: Universitas Komputer Indonesia
8. Bascara. (2013, Januari 24). Licuid Crystal
Display (LCD). Dipetik Januari 8, 2015, dari
http://baskarapunya.blogspot.com/2013/01/ liquid-crystal-display-lcd-16-x-2.html .
9. Hufaidillah, G. (2013). Penjelasan dan
Rangkaian Sensor Infrared. Bandung: Berbagi Ilmu Komputer dan Elektronika
10. Maulana, F.N,. (2013). Prinsip Kerja Limit
iv
KATA PENGANTAR
Bismillahirrahmannirrahim Assalamu’alaikum Wr. Wb.
Segala puji bagi Allah SWT, Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW., keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat dan hidayah-Nya, akhirnya penulis dapat menyelesaikan tugas akhir ini, meskipun hasilnya masih jauh dari kata sempurna, mengingat keterbatasan pengetahuan, keilmuan, pengalaman serta referensi yang penulis miliki. Oleh karena itu penulis selalu terbuka untuk menerima kritik dan saran yang dapat menyempurnakan tugas akhir ini.
Tugas akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin penulis sebutkan satu per satu, namun dengan segala kerendahan hati, penulis mengucapkan terima kasih kepada :
1.Kedua orangtua beserta keluarga besar penulis, yang sudah memberikan do’a, dukungan, kasih sayang dan motivasi, sehingga penulis dapat menyelesaikan tugas akhir ini.
2.Bapak Prof. Dr. H. Denny Kurniadie, Ir. M.Sc, selaku Dekan Fakultas Teknik dan Ilmu Komputer.
3.Bapak Dr. Wendi Zarman, S.Si M.Si selaku ketua Jurusan Teknik Komputer Universitas Komputer Indonesia.
4.Bapak Taufiq Nuzwir Nizar, S.Kom. M.Kom selaku dosen wali penulis yang telah mengasuh dan mengajarkan penulis selama penulis menuntut ilmu. 5.Bapak Hidayat, S.Kom, M.T selaku pembimbing serta guru yang senantiasa
v
6.Bapak dan Ibu seluruh staf dosen Jurusan Teknik Komputer yang telah memberikan ilmu, motivasi dan bantuan kepada penulis.
7.Teman-teman angkatan 2010, teman-teman luar jurusan, asisten Lab Sistem Digital, dan teman-teman seperjuangan lainnya, yang telah memberi semangat dan bantuan kepada penulis.
8.Serta seluruh pihak yang telah mendukung dan membantu dalam penyusunan tugas akhir ini yang tidak dapat penulis sebutkan satu-per satu.
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami.
Bandung, Februari 2015
44
BAB I
KESIMPULAN DAN SARAN
1.1 Kesimpulan
Berdasarkan hasil pengujian dan analisa yang telah dilakukan maka dapat ditarik kesimpulan dalam segala aspek yang di antaranya adalah :
1. Alat pakan ikan otomatis ini berhasil maju dan mundur menggunakan driver motor L298N sesuai dengan tabel 4.1.
2. Pada alat ini menggunakan modul RTC yang berfungsi untuk mengatur penjadwalan kerja alat dan berdasarkan tabel 4.3 modul ini berhasil berjalan dengan baik
3. Pembuka dan penutup pakan ikan berhasil dijalankan menggunakan motor servo sesuai dengan tabel 4.4.
4. Sensor Infrared berhasil dijalankan sebagai indikator ada atau tidak adanya pakan ikan sesuai dengan hasil pengujian pada tabel 4.5. 5. Pada alat ini menggunakan limit switch yang berfungsi untuk
mengetahui lamanya bukaan pada katup pakan ikan dan berdasarkan pada tabel 4.6 alat ini berhasil berjalan dengan baik.
1.2 Saran
Untuk pengembangan dari penggunaan sistem pengntrolan pakan ikan oomatis ini adalah :
1. Pembuatan system pengontrolan pakan ikan dapat di tambahkan media sms gateway untuk memberitahukan akan habis pakan ikannya.
![Gambar 2.2 Blok diagram fungsional Atmega16 [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1319167.793430/8.595.162.467.83.423/gambar-blok-diagram-fungsional-atmega.webp)
![Gambar 2.4 Bentuk fisik motor DC ( Power Window) [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1319167.793430/10.595.184.445.212.370/gambar-bentuk-fisik-motor-dc-power-window.webp)
![Gambar 2.6 IC L298N [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1319167.793430/13.595.214.418.485.570/gambar-ic-l-n.webp)